Сканирующее устройство оптического типа

Автор: Минин О.В.
Журнал: Компьютерная оптика @computer-optics
Рубрика: Технологии компьютерной оптики
Статья в выпуске: 25, 2003 года.
Бесплатный доступ
Короткий адрес: https://sciup.org/14058572
IDR: 14058572
Текст статьи Сканирующее устройство оптического типа
На разработку систем построения изображений когерентно-оптического типа существенным образом влияют требования по быстродействию и практическое назначение устройства [1-2]. В устройствах радиовидения миллиметрового и субмиллиметрового диапазона длин волн, предназначенных для контроля трехмерного объема в реальном времени, применение механических сканирующих систем вряд ли возможно по требованиям быстродействия [2]. В тоже время в ряде систем, где требования работы в реальном времени не играют решающей роли, например, при досмотре багажа, писем, контроля подлинности купюр и т.п. [2], применение механических сканирующих систем может быть целесообразно. Ниже рассмотрен один из вариантов сканирующей системы оптического типа, предназначенной для работы в миллиметровом диапазоне длин волн.
Принцип работы сканирующей системы
Из всех возможных систем механического сканирования диаграммой направленности миллиметровой антенны диэлектрический двухклиновый сканер наилучшим образом вписывается в конструкцию антенны [3]. На рис. 1 схематически представлен двухклиновый сканер, рис. 1а и 1б иллюстрируют, соответственно, максимальное и нулевое отклонение луча. На рис. 1в показаны принятые обозначения углов для случая максимального отклонения, т.е. 9 3 9 max, где 9 - отклонение от оси антенны.
Соотношения между углами определяются формулами:
sin(91 -5) = n sin5, sin (92-5) = — sin (91 -5), (1)
n sin 93 = n sin 92.
При n 5 <<1 для оценок можно пользоваться формулой:
9 = 25(n -1), где n – коэффициент преломления материала диэлектрика, 5 - угол при вершине клина.
Если клинья вращать на углы ф1 и ф2, то направление волнового вектора будет отклоняться на углы 9 и ф, где ф - отклонение в плоскости, перпендикулярной оси антенны (азимутальный угол). Примем ф1=ф2=0 - соответствует рис. 1б, при этом 9=0. Обозначим единичные волновые векторы в различных областях преломляющей системы ri в соответствии с рис. 1в. Преломление «луча» описы- вается системой уравнений (векторная форма закона Снеллиуса):
n ( r 2 х M ) = ( r 1 х N ) ,
n (r 2 х z о где: N – единичная нормаль наклонной поверхности клина 2 (верхний клин рис. 1); z0 - единичный вектор оси.
Примем следующий порядок обозначений направляющих углов для г, и N :
r 1 (9 1 , Ф 1 ) ; r 2 (9 2 , ф 2 ) ; r з (9 з , Ф з ) ; N (5 , Ф 2 ) .
Очевидно, что sin ( 9 1 + 5 ) = n sin 5 , ф 1 = ф 1.
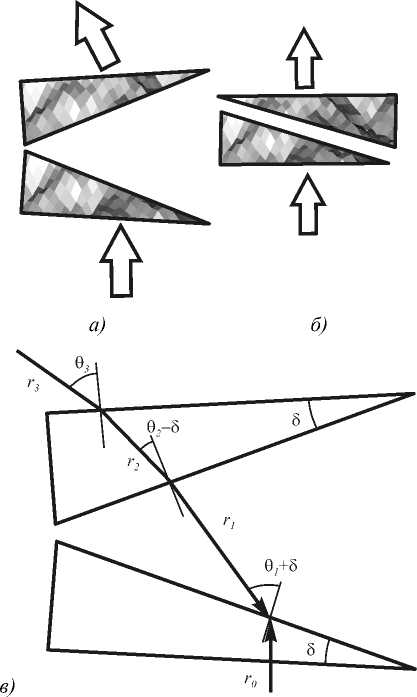
Рис. 1. Оптическая схема сканера
Решение системы уравнений (2) имеет вид:
n sin 9 2 sin ф 2 + n cos 9 2 tg 5 =
= sin 91sin ф1 + cos 91sin 92 tg5, n sin 92 cos ф 2 + n cos 92 tg5 = (3)
= sin 9 1cos ф 1 + cos 9 1cos 9 2 tg 5 , sin 9 = n sin 9 2 , ф = ф 2.
Для уменьшения веса и инерционности клина целесообразно провести его зонирование. Зонирование клина иллюстрирует рис. 2. Условием зонирования является равенство А = Х 0, где Х0 - средняя длина волны. Исходя из этого равенства, в соответствии с обозначениями на рис. 2, имеем:
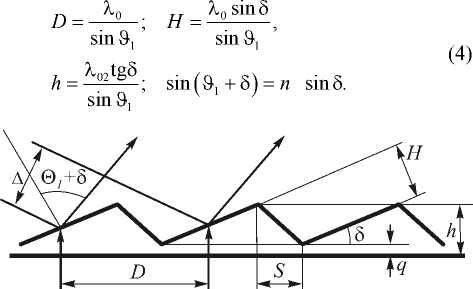
Рис. 2. Схема зонирования.
Толщина зонированного клина равна сумме толщин «технологической подложки» q и клина h , т.е. d «Х 0 /( n -1)+ q . Форма ступенек, изображенная на рис. 2, более технологична пилообразной формы. Протяженность паразитного участка клина S , где нарушаются условия преломления, и поле является дифракционным, имеет примерно ту же величину, что и пила: n tg 5 . Для улучшения согласования клина с воздухом и уменьшения френелевских потерь на отражение, возможно нанесения согласующего покрытия на поверхность клина. Согласующее покрытие накладывается на плоские поверхности, что также увеличивает технологичность его изготовления.
ществ, по сравнению с зеркальными механическими и электронными сканерами:
-
1. хорошая конструктивная сочетаемость с облучателем и линзой антенны;
-
2. реализация сканирования при сравнительно простом приводе вращения клина, наиболее просто реализуется спиральное сканирование;
-
3. высокая технологичность изготовления клиньев и линз сканера;
-
4. при соответствующем выборе диэлектрического материала обеспечиваются малые потери и высокая надежность сканера;
-
5. применение согласующих слоев обеспечивает малый уровень кроссполяризации.
Для достижения высоких электродинамических параметров при угле сканирования порядка 300 целесообразно использовать клинья из диэлектрического материала с коэффициентом преломления n ® (3-4). Внешний вид зонированных клиньев показан на рис. 3.
Результаты экспериментальных исследований сканера
В экспериментальной установке применялся рупорный облучатель, дополненный фазовым корректором в виде четырехуровневой зонной пластиной [2] с фокусным расстоянием 150 м. Фазовый корректор помещался вблизи грани входного клина сканера. Исследования проводились на длине волны 8 мм, применялись две пары клиньев с углами 60 и 150. Материал диэлектрика – оргстекло с показателем преломления 1,59. Схема экспериментальной установки показана на рис. 4.
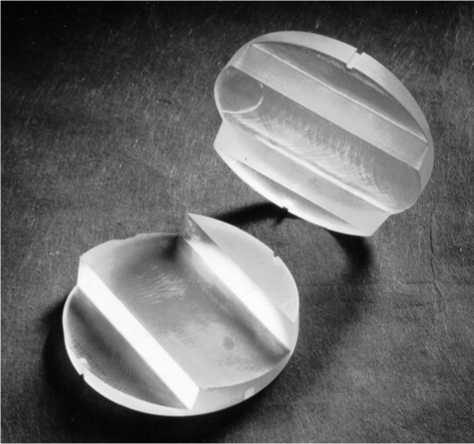
Рис. 3. Зонированные клинья сканирующего устройства
Управление направлением основного лепестка диаграммы направленности антенны с помощью пары диэлектрических клиньев имеет ряд преиму-
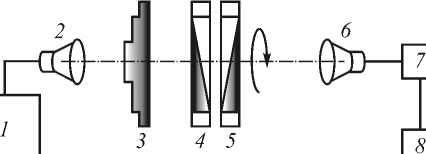
Рис. 4. Схема экспериментальной установки:
1 – генератор СВЧ, 2 – излучающий рупор,
3 – дифракционный фазовый корректор,
4,5 – диэлектрические клинья с возможностью вращения, 6 – приемный рупор, 7 – каретка, 8 – детектор, 9 – индикатор
Рупорный облучатель (2) помещался в фокусе фокусирующего корректора (3). Расстояние от сканера до приемного рупора 6 составляло около 700 мм при апертуре сканера 100 мм. Установка элементов и юстировка осуществлялись с помощью лазерного луча. Проверка работы сканера заключалась в оценке отклонения максимума излучения от оси. Оценка положения максимума уточнялась методом вилки при перемещении кареткой (7) приемного рупора (6) в направлении, перпендикулярном оптической оси. Линейное сканирование осуществлялось вращением клиньев с одинаковой скоростью в противоположных направлениях. Полуширина диаграммы направленности системы составляла около 2,5-30.
Оценка уровня кроссполяризации проводилась путем взаимного поворота на 900 рупоров (2) и (6). При различных взаимных поворотах клиньев уровень кроссполяризации не превышал величину –12 дБ для клина с углом 6 градусов и –8 дБ для клина с углом 150. При этом не принималось мер по согласованию волновых импедансов клиньев и уменьшению облучения краев клиньев и оправы.
Была проведена оценка возможности совмещения сканера с моноимпульсным облучателем путем изучения возможности смещения максимума излучения на величину около 2,50 (ширину диаграммы направленности) за счет поперечного смещения облучателя в фокусе. Эксперименты показали возможность применения разработанного сканирующего устройства в системах с моноимпульсным облучателем.
Таким образом, в работе кратко рассмотрено сканирующее устройство оптического типа на основе двух зонированных вращающихся клиньев. Показано, что применение такого сканирующего устройства позволяет механическим путем осуществить двумерное спиральное сканирование диаграммой направленности антенны в миллиметровом диапазоне длин волн.
