Smart lungmotor: активный клапан выдоха

Автор: Шабуров Павел Олегович, Маргацкая Елена Александровна
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 1 т.13, 2013 года.
Бесплатный доступ
Активный клапан выдоха - конструктивный элемент аппарата искусственной вентиляции легких, который предназначен для поддержания целевого давления в дыхательных путях и в то же время для обеспечения возможности контроля над спонтанными дыханиями пациента во время инспираторной фазы вентиляции с контролем по давлению. Конструкция привода активного клапана выдоха представляет собой линейный двигатель постоянного тока со встроенным в его корпус постоянным магнитом и датчиком Холла. Для выбора оптимальных размеров конструктивных элементов двигателя в рамках достижения необходимого технического результата требуется решение задачи оптимизации, перед проведением которой, однако, следует оценить влияние отдельных элементов конструкции двигателя на эффективность использования машины и быстродействие, что позволит определить зависимые и независимые переменные (размеры элементов конструкции) для последующей постановки и решения задачи оптимального проектирования. Методом расчета полевой задачи в программном пакете Maxwell проводится анализ влияния таких параметров (размеров элементов конструкции) как: диаметр и высота магнита, толщина и высота обмотки. Для сравнения результатов рассчитывается коэффициент использования машины и быстродействие. Среди элементов конструкции линейного двигателя постоянного тока рассматриваемого типа наиболее эффективное влияние, с точки зрения коэффициента использования машины и быстродействия, оказывает увеличение диаметра магнита, в то время как наименьший эффект достигается при увеличении высоты обмотки. Таким образом, в результате предварительной оценки можно утверждать, что в случае выбора быстродействия как критерия качества, оптимальное проектирование будет достигнуто при увеличении параметров магнита до максимально допустимых при минимальном значении высоты обмотки. Следовательно, в соответствии с определенным критерием оптимальности проведенный анализ дает возможность оценить вероятный путь оптимизации.
Линейный двигатель, коэффициент использования машины, быстродействие, метод конечных элементов
Короткий адрес: https://sciup.org/147158215
IDR: 147158215 | УДК: 62-529/612.216.3
Smart lungmotor: active exhalation valve
Active exhalation valve is the structural element of ventilator, which is designed to maintain target pressure in the airways and at the same time to allow for control of the spontaneous breathing of the patient during the inspiratory phase of ventilation to control the pressure. Drive design active exhalation valve is a linear DC motor with built in his body permanent magnet and a Hall sensor. To select the optimal size of the design elements of the engine within the reach the desired result, a technical solution to the problem of optimization, prior to which, however, should assess the impact of individual structural elements of the engine efficiency and performance of the machine, which will determine the dependent and independent variables (size of the structural elements) for the subsequent formulation and solution of the problem of optimal design. The method of calculation of the field problem in the software package Maxwell examines the influence of these parameters (dimensions of structural elements) as the diameter and height of the magnet, the thickness and height of the coil. For comparing the calculated level of availability and performance. Among the elements of the design of the linear DC motor of the type considered most effective impact, in terms of availability and performance, providing an increase in the diameter of the magnet, while the smallest effect is achieved at the height of the coil. Thus, the preliminary assessment can be argued that in the case of selecting the performance as a criterion of quality, optimal design is achieved by increasing the parameters of the magnet to the maximum at the minimum height of the coil. Therefore, in accordance with a certain optimality criterion, the analysis makes it possible to estimate the likely path optimization.
Текст научной статьи Smart lungmotor: активный клапан выдоха
Сущность работы активного клапана выдоха в общей системе аппарата ИВЛ заключается в том, что система управления клапаном, меняя сопротивление воздуху, обеспечивает постоянное предписанное давление в дыхательных путях в течение всего заданного временного интервала. Однако в реальной клинической ситуации аппарат ИВЛ не успевает мгновенно среагировать на выдох пациента [1]. Исключение малейшей задержки выдоха, особенно при попытках спонтанного дыхания во время инспираторной фазы, для исключения так называемого конфликта аппарата ИВЛ и пациента, является одним из основных показателей активного клапана выдоха.
Среди последних технических решений следует отметить электромагнитный клапан выдоха аппарата искусственной вентиляции легких американской компании Hamilton Medical [2], который состоит из корпуса, магнитопровода, постоянного магнита, соленоида, мембраны, якоря с пружиной и штоком. Недостатком данного технического решения является недостаточно высокое быстродействие ввиду наличия такого инерционного звена как пружина. Для исключения данного недостатка предлагается применение линейного электропривода постоянного тока, который обеспечит высокие показатели работы при минимальных габаритах. Для выбора оптимальных размеров конструктивных элементов двигателя в рамках достижения необходимого технического результата требуется решение задачи оптимизации. При проведении расчетов проектируемого объекта необходимо выделить некоторую совокупность независимых конструктивных параметров, значения которых однозначно определяют все остальные параметры и характеристики, в том числе значения критерия оптимальности. В данном случае в качестве независимых переменных могут выступать такие параметры элементов конструкции как диаметр и высота магнита, толщина и высота обмотки, влияние которых на общую эффективность использования машины следует предварительно оценить, что позволит построить прогноз решения задачи оптимизации.
Наиболее адекватное реальному электромеханическому устройству математическое описание можно получить при решении полевой задачи. Среди методов численного решения дифференциальных уравнений поля наибольшее распространение получил метод конечных элементов. Решение полевой задачи методом конечных элементов предполагается проводить с использованием программного пакета Maxwell [3, 4].
Линейный электродвигатель представляет собой электрический двигатель, в котором подвижная часть не вращается, а линейно перемещается под действием электромагнитного поля в воздушном зазоре, источником которого является постоянный магнит. Силы электромагнитного взаимодействия тока якоря с полем возбуждения создают тяговое электромагнитное усилие Fm в плоскости якоря, которое приводит к поступательному перемещению. Конструктивная схема привода представлена на рис. 1 [5].
В целом электропривод работает следующим образом. Датчик Холла 6 определяет положение объекта регулирования, которым является мембрана, осуществляющая регулирование проходного отверстия в линии выдоха пациента, путем преобразования линейного перемещения якоря 4 двигателя в напряжение, позволяющее определить текущее положение. В то же время требуемое положение объекта регулирования поступает в программу управления от центрального процессора. Значение скважности вычисляется согласно заложенной в программу системе автоматического регулирования на основе принципа управления по ошибке. Управляющие импульсы с требуемой величиной скважности в соответствии с двухтактной реверсивной мостовой схемой посредством усилителя мощности импульсов управления поступают на обмотку двигателя. Формируется необходимое тяговое усилие для устранения ошибки между заданным и текущим положением мембраны, а также происходит фиксирование требуемого положения.
Основные требования, которым должен отвечать рассматриваемый электропривод: усилие герметизации клапана – 2,5 Н, напряжение питания – 24 В, диапазон перемещения – 4 мм, временя позиционирования – не более 50 мс, режим работы продолжительный, рабочее положение в пространстве – произвольное, при эксплуатации в макроклиматическом районе с умеренным климатом и 4-й категории размещения для эксплуатации в помещениях (объемах) с искусственно регулируемыми климатическими условиями. Ориентировочные габаритные размеры двигателя: высота не должна превышать 36 мм, диаметр не должна превышать 37 мм.
Выберем постоянный магнит (обозначен под номером 3 на рис. 1) из магнитного сплава NdFeB (неодим-железо-бор) с параметрами остаточной индукции Вг = 1,22 Тл и коэрцитивной силе по намагниченности Нс = 1120 кА / м . Неодимовые магниты обладают наибольшей магнитной силой из всех постоянных магнитов, значительно превосходят по устойчивости к размагничиванию магниты типа ЮНДК (AlNiCo), обладают высокой остаточной магнитной индукцией и сохраняют состояние намагниченности в течение длительного времени [6].
Для ферромагнитных участков (корпус и магнитопровод) примем марку стали Ст3.
Первоначально необходимо задаться некоторыми минимально возможными для выполнения требуемых задач габаритными размерами двигате- ля и размерами элементов конструкции. Эскиз части двигателя с основными размерами и введенными обозначениями представлен на рис. 2.
В рамках ограниченных габаритных размеров двигателя улучшения выходных характеристик можно добиться за счет варьирования следующих параметров (размеров элементов конструкции):
-
1) увеличение диаметра ферромагнитной вставки (магнитопровода) и магнита;
-
2) увеличение высоты магнита;
-
3) увеличение толщины обмотки (s об ):
-
а) при неизменном диаметре провода;
-
б) за счет увеличения диаметра провода;
-
4) увеличение высоты обмотки.
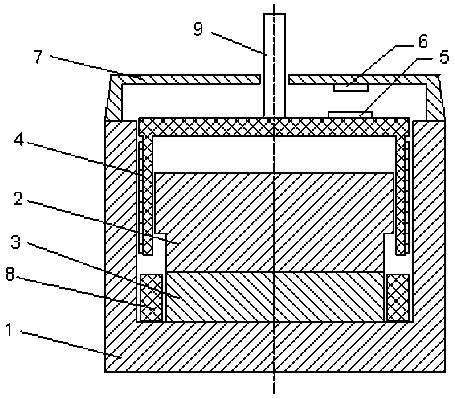
Рис. 1. Конструктивная схема привода (1 – корпус, 2 – магнитопровод, 3 – магнит, 4 – диэлектрический якорь с обмоткой, 5 – сигнальный элемент датчика положения якоря, 6 – чувствительный элемент датчика положения якоря, 7 – крышка, 8 – мягкие упоры, 9 – выходной шток)
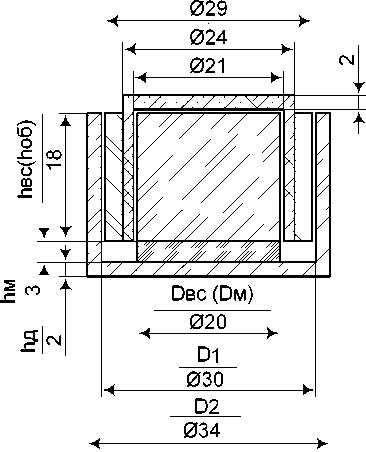
Рис. 2. Эскиз части двигателя
Электромеханические системы
Для удобства графического представления ре- зультатов влияние параметров оценивалось в диапазоне от 0 мм (начальная конфигурация) до 2 мм с шагом d = 0,2 мм.
За критерий оптимизации рационально принять коэффициент использования машины [8]:
^тяг к и = ,
7 • К я
Результаты решения полевой задачи для некоторых значений диаметра магнита представлены графически на рис. 3 и рис. 4 в виде графиков переходных процессов перемещения якоря и силы тяги в зависимости от времени соответственно. При изменении других параметров (элементов конструкции) результаты представляются аналогичным образом.
На рис. 5 и рис. 6 представлены сравнительные зависимости к и и t пп от шага изменения параметров для всех предустановленных изменений конфигурации.
Анализ полученных результатов показывает, что в заданных ограниченных габаритах двигателя наиболее эффективным, с точки зрения коэффициента использования является увеличение толщины обмотки с неизменным диаметром провода, однако, с точки зрения быстродействия, при таком изменении конфигурации наблюдается худший результат (48 мс). Худший результат по к и отмечается в случае увеличения высоты обмотки, при этом увеличение высоты обмотки практически не влияет на эффективность использования машины. Самое высокое быстродействие достигается при увеличении толщины обмотки с одновременным увеличением диаметра провода (18 мс).
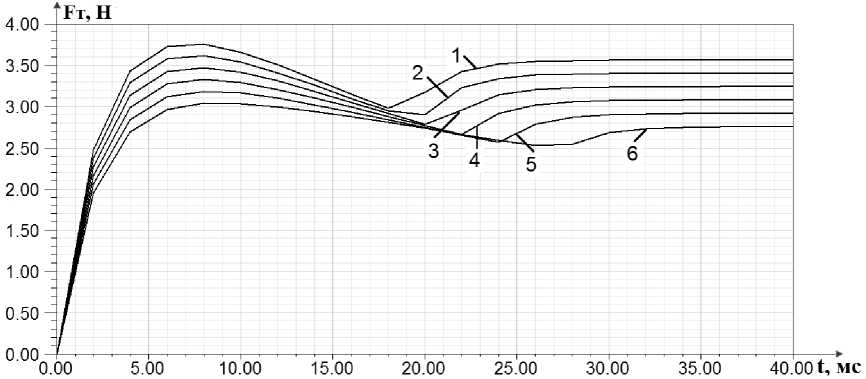
Рис. 3. Графики переходных процессов силы тяги для различных значений диаметра магнита (1 - О м = 24 мм, 2 - О м = 23.2 мм, 3 - О м = 22.4 мм, 4 - О м = 21,6 мм, 5 - О м = 20,8 мм, 6 - О м = 20 мм)
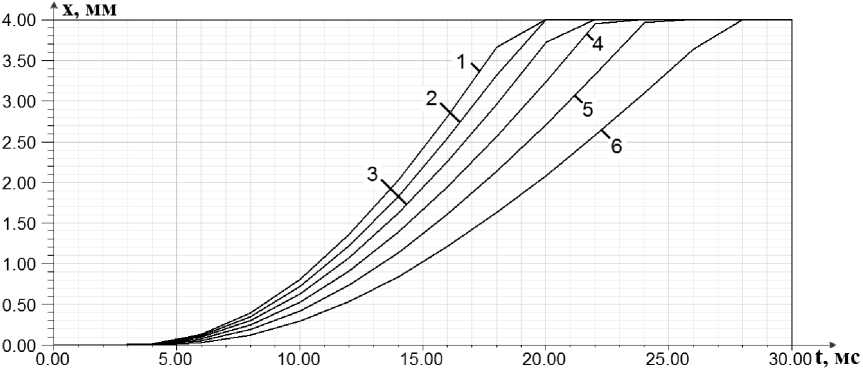
Рис. 4. Графики переходных процессов перемещения якоря для различных значений диаметра магнита
(1 - О м = 24 мм, 2 - О м = 23.2 мм, 3 - О м = 22,4 мм, 4 - О м = 21,6 мм, 5 - О м = 20,8 мм, 6 - О м = 20 мм)
В качестве оптимального изменения конфигурации следует считать увеличение диаметра магнита, поскольку в этом случае происходит значительное увеличение коэффициента использования и относительно высокое быстродействие (20 мс). Оставшиеся независимые переменные на основе проведенного анализа можно расположить в следующей последовательности согласно убыванию степени их положительного влияния на характери- стики двигателя: высота магнита, толщина и высота обмотки. Таким образом, процедура оптимизации должна стремиться увеличить параметры постоянного магнита до максимально допустимых значений, высота обмотки будет стремиться к минимуму ввиду того, что она оказывает слабое влияние на производительность машины, а толщина обмотки займет при этом некоторое промежуточное положение. Следовательно, при решении
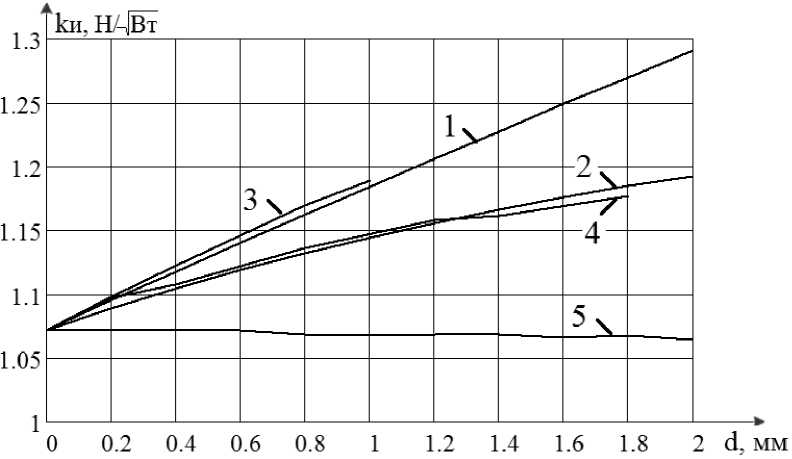
Рис. 5. График зависимости к и (d) при изменении размеров элементов конструкции
(1 – при увеличении диаметра магнита, 2 – при увеличении высоты магнита, 3 – при увеличении толщины обмотки с неизменным диаметром провода, 4 – при увеличении толщины обмотки при одновременном увеличении диаметра провода, 5 – при увеличении высоты обмотки)
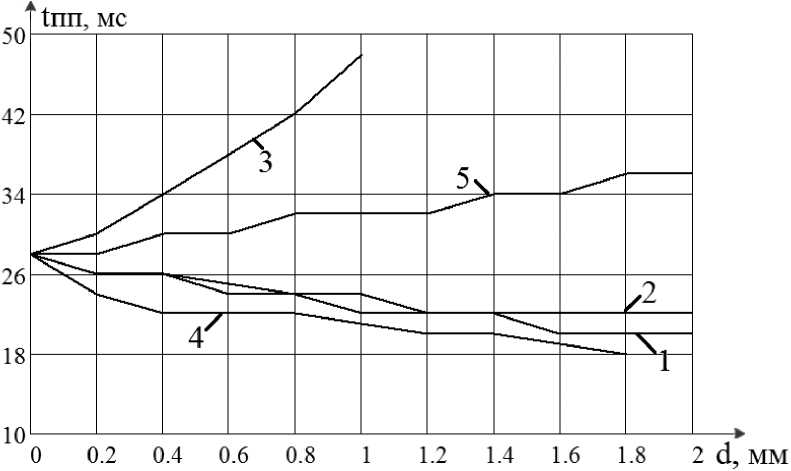
Рис. 6. График зависимости t пп (d) при изменении размеров элементов конструкции
(1 – при увеличении диаметра магнита, 2 – при увеличении высоты магнита, 3 – при увеличении толщины обмотки с неизменным диаметром провода, 4 – при увеличении толщины обмотки при одновременном увеличении диаметра провода, 5 – при увеличении высоты обмотки)
Электромеханические системы
полевой задачи с целью оценки характера влияния элементов конструкции двигателя, определенных в качестве независимых, становится возможным предугадать направление пути оптимизации без детального аналитического расчета.
Список литературы Smart lungmotor: активный клапан выдоха
- Горячев, А.С. Основы ИВЛ/А.С. Горячев, ИА. Савин. -М.: Медиздат, 2009. -255 с.
- Hamilton Medical GALILEO GOLD. Available at: http://lungventilator.com/EnglishVersion/Galileo_Gold_AD.htm, (accessed 1 February 2013).
- Ansoft Corporation. Ansoft Maxwell 3D Field Simulator v11 User’s Guide. J. of Computer-Mediated Communication, 2005, available at: http://www. slideshare. net/EraBrown/ansoft-maxwell-3d-v11 -user-guide
- Помогаев, Г.В. Применение метода конечных элементов для расчета электромагнита тормоза инвалидной коляски/Г.В. Помогаев, А.И. Согрин, М.А. Лютов//Вестник ЮУрГУ. Серия «Энергетика». -2005. -Вып. 6. -№ 9. -С. 108-109.
- Шабуров, П.О. Электропривод клапана выдоха аппарата искусственной вентиляции легких. Электротехнические системы и комплексы: междунар. сб. науч. тр./П.О. Шабуров, Е.А. Маргацкая. -2012. -Вып. 20. -С. 83-90.
- Лифанов, В.А. Расчет электрических машин малой мощности с возбуждением от постоянных магнитов: учеб. пособие/В.А. Лифанов. -Челябинск: Изд-во ЮУрГУ, 2010. -164 с.
- Сливинская, А.Г. Электромагниты и постоянные магниты/А.Г. Сливинская. -М.: Энергия, 1972. -248 с.
- Мармелев, Г.Н. Разработка и исследование моментных микродвигателей постоянного тока: автореф. дис.. канд. техн. наук/Г.Н. Мармелев. -Челябинск, ЧПИ, 1972.
