Снижение цены машиностроительными предприятиями на товары двойного назначения для производственных нужд нефтегазового комплекса России (на примере акселерометров и гироскопов)
")
Автор: Северюхин А.М.
Журнал: Вестник Алтайской академии экономики и права @vestnik-aael
Рубрика: Экономические науки
Статья в выпуске: 8-2, 2020 года.
Бесплатный доступ
В научной статье были рассмотрены отдельные аспекты снижения цены на товары двойного назначения (датчики), специально изготавливаемые предприятиями оборонно-промышленного комплекса. Моделирование и управление погрешностями в работе акселерометров и гироскопов (в составе бесплатформенных инерциальных навигационных систем) осуществляют при помощи современных программных продуктов, которые могут решать сложные математические, инженерные и научные задачи в любой отрасли знаний. Объект исследования - предприятия оборонно-промышленного комплекса, изготавливающие готовые продукты и технологии двойного назначения для компаний нефтегазового комплекса. Предмет исследования - цена датчиков акселерометров и гироскопов. Цель исследования - составить алгоритм снижения цены на датчики (акселерометры и гироскопы). Методы научного познания материалов исследования: в научной статье применялись схемотехнические, математические и алгоритмические методы. Целесообразно отметить, что датчики ускорения (акселерометры) и изменения направления (волоконно-оптические гироскопы) используются в разных сферах производства (роботостроение, телеметрия, авиастроение, приборостроение и пр.). Перспективы своих дальнейших исследований автор видит в моделировании и развитии теоретико-методологического аппарата в области производства готовых продуктов и технологий двойного назначения для предприятий оборонно-промышленного комплекса Российской Федерации.
Управление, погрешность, акселерометры, гироскопы, математические программы, производство, промышленность, цена
Короткий адрес: https://sciup.org/142225320
IDR: 142225320 | УДК: 338 | DOI: 10.17513/vaael.1288
Price reduction by machine-building enterprises for dual-purpose goods for the production needs of the oil and gas complex of Russia (on the example of accelerometers and gyroscopes)
In the scientific article, certain aspects of reducing the price of dual-use goods (sensors), specially manufactured by enterprises of the military-industrial complex, were considered. Modeling and control of errors in the operation of accelerometers and gyroscopes (as part of strapdown inertial navigation systems) is carried out using modern software products that can solve complex mathematical, engineering and scientific problems in any field of knowledge. The object of research is the enterprises of the military-industrial complex that manufacture finished products and dual-use technologies for companies in the oil and gas complex. The subject of research is the price of accelerometer and gyro sensors. The purpose of the study is to develop an algorithm for reducing the price of sensors (accelerometers and gyroscopes). Methods of scientific knowledge of research materials: in the scientific article, circuitry, mathematical and algorithmic methods were used. It is worth noting that acceleration sensors (accelerometers) and direction changes (fiber-optic gyroscopes) are used in various fields of production (robotics, telemetry, aircraft construction, instrumentation, etc.). The author sees the prospects for his further research in the modeling and development of the theoretical and methodological apparatus in the field of production of finished products and dual-use technologies for enterprises of the military-industrial complex of the Russian Federation.
Текст научной статьи Снижение цены машиностроительными предприятиями на товары двойного назначения для производственных нужд нефтегазового комплекса России (на примере акселерометров и гироскопов)
In the scientific article, certain aspects of reducing the price of dual-use goods (sensors), specially manufactured by enterprises of the military-industrial complex, were considered. Modeling and control of errors in the operation of accelerometers and gyroscopes (as part of strapdown inertial navigation systems) is carried out using modern software products that can solve complex mathematical, engineering and scientific problems in any field of knowledge. The object of research is the enterprises of the military-industrial complex that manufacture finished products and dual-use technologies for companies in the oil and gas complex. The subject of research is the price of accelerometer and gyro sensors. The purpose of the study is to develop an algorithm for reducing the price of sensors (accelerometers and gyroscopes). Methods of scientific knowledge of research materials: in the scientific article, circuitry, mathematical and algorithmic methods were used. It is worth noting that acceleration sensors (accelerometers) and direction changes (fiber-optic gyroscopes) are used in various fields of production (robotics, telemetry, aircraft construction, instrumentation, etc.). The author sees the prospects for his further research in the modeling and development of the theoretical and methodological apparatus in the field of production of finished products and dual-use technologies for enterprises of the military-industrial complex of the Russian Federation.
Научная проблема в области инновационного производства и ценообразования роторно-управляемых систем (далее – РУС) возникла в конце 20 века.
Активные исследования по этой проблематике в зарубежной и отечественной литературе стали публиковаться с начала 21 века. Энергетическая стратегия до 2035 г. предусматривает новые способы и инновационные подходы в добыче нефти и газа [16]. В процессе испытаний роторно-управляемых систем [7] с ТМС такими экономически значимыми субъектами предпринимательской деятельности как ПАО «Татнефть», ПАО «ГАЗПРОМ» отмечаются недостатки конструкций в части телеметрии и навигационной составляющей. Отечественные производители роторно-управляемых систем должны учесть, что добыча полезных ископаемых в России и разработка скважин ведётся не только на юге страны, но и в условиях крайнего Севера. Сегодня датчики ускорения (акселерометры) и изменения направления (гироскопы) используются в разных сферах производства, в том числе в ОПК, как технология двойного назначения [14] (роботостроение, телеметрия, авиастроение, приборостроение). Но, как известно, каждый прибор имеет свои погрешности в работе, которые происходят при смене температурного режима, местоположения, вибрациях, погружениях и так далее. Следует отметить, что уже произошло утверждение средств измерений [15], получен сертификат от компании ТМС РУС [15]. В этой связи учёные должны работать над решением научной проблемы по управлению и минимизацией ценовой составляющей акселерометров и гироскопов.
Степень изученности материалов исследования
Тема научной статьи является популярной среди отечественных учёных: Г.В. Максюшин, Н.С. Соболева рассматривали учёт погрешностей МЭМС-акселерометра при его моделировании [1, С. 1-5]; В.В. Матвеев проводил инженерный анализ погрешностей бесплатфор-менной инерциальной навигационной системы [2, С. 251-267]; Д.В. Павлов, К.Г. Лукин, М.Н. Петров разработали имитационную модель MEMS-акселерометра в среде SIMULINK [4, С. 28-33]; С.В. Пономарева, В.С. Кутузова, А.А. Павлович провели расчёт погрешностей при работе бесплатфор-менной инерциальной навигационной системы на подвижных объектах [5, С. 92-99]; В.И. Розенблит, В.Л. Буря-ковский, Е.Ф. Фитерман, У.Л. Гудман анализировали елеметрическую систему [6]; О.С. Салычев представил способ определения навигационных параметров бесплатформенной инерциальной навигационной системой [8]; Г.В. Сергеев провёл сследование вопросов построения телеметрических систем, использующих в качестве прототипа поднесущих колебаний некоторые системы ортогональных функций [9, С. 25-250]; Д.С. Силантьев представил модель ошибок бесплатфор-менной инерциальной навигационной системы летательного аппарата [10, С. 1724]; В.М. Терешков применил прямой метод оценивания погрешностей датчиков инерциально-спутниковой навигационной системы [11, С. 8-16]; А.Н. Ткаченко, Д.Ю. Ларионов, Л.Н. Подгорная, Р.В. Шалымов построили модель для исследования алгоритмов работы инерциальных измерительных систем [12]; М.С. Турбаков, А.А. Мелехин, С.Н. Кри-вощеков, А.А. Щербаков представили телеметрическую систему мониторинга ствола скважины [13]; А.А. Хачатурян, С.В. Пономарева, Е.С. Силиназанима-лись повышением качества промышленного производства путем компенсации влияния температуры на выходные параметры акселерометра в бесплатформен-ной инерционной навигационной системе [17, С. 14]; Ю.Н. Челноков, С.Е. Пе-реляев, Л.А. Челнокова проводили исследование алгоритмов определения инерциальной ориентации движущегося объекта [18]; С.А. Черенков, А.А. Лисин представили способ определения навигационных параметров и бесплатформен-ная инерциальная навигационная система для его осуществления [19]; В.П. Чупров, Д.А. Будаев изучили устройство для фиксации забойного блока телеметрической системы в ориентирующем переводнике бурильной колонны [20].
В таблице 1 рассмотрим характеристики современных программных продуктов, которые помогают отечественным учёным решать сложные математические и технические задачи.
Из таблицы 1 следует, что ведущие научные школы Российской Федерации используют в процессе управления погрешностями в работе БИНС (акселерометров и гироскопов) такие современные программные продукты как: Scilab, Matcat и среду SIMULINK.
|
О s !§ СТ я к р g 3 § s CTz о cd ® У Ю О Р ст ^ s§ |
Й ст о >S >S ст а S |
й CD Я а )Я Й 1 3м RQ 1^ ^СхГ |
и е я i 8 я В & ^^, Н7Г to у е-ё Ss |
|
У S о Я g 3 5 5 5 ст g Rob 8 ” | ^8 а &§а В s g я о ® к &а а |
СО S и S к >я 5 8 GO 33 з а Я cd s а to 87 Й Ч & о 8 У л а |
go а Я )Я ю S ^ я У )Я о 6 О Я CL о cd ОО CD я я q 3 8 й CD щ ° о § я 8 Ц cd 3Я с^а cd Я ^ Рч о Я )Я 2 я я Я я У cd я я Я МО Е<зя & & 5 Зу § □ Н а й 3 s О 2 Р ’—< гФ о сЗ о |
gpi я Й 2 а у я а Р о у я g о 1 s ” 5 =я й Д в я § „ „ о О Я д Я а я а д я ст Н р< а у m У в Я н й св и о Я св Я S Я )Я Яо о и и у я У Я я s S у Я у S у Е о &О 3 Й ° 2 В S-»y щ св ® Ь Н So К о Я Я о |
|
8 8 И о у р а а |
ЗЙ д| о Й s § а|-$а Pis X № g CD Я Я s §ha 3 § s g 1 § О § я § х а cd о О 5 8 Ч CD Н CD % я к о и я я S я |
m х а Я Я о cd \о Р-| я о X S й § й ” О Й 5 я у о s 11 е|| и s О В S >я S я ° Ч И to я | . |
о й у х §^ н 8 ® X Р О 0& а^ g 8 S Sal |
|
g е | g g CQ g щ § ст Я И К я |
1 CZ) |
8$ S |
’о GO |
|
-н |
04 |
ГП |
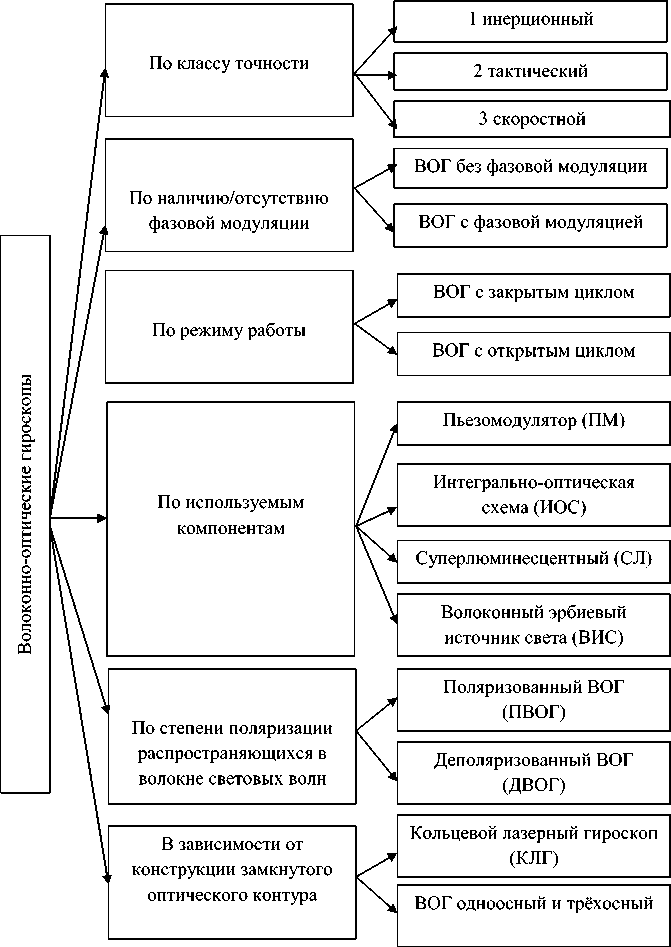
Рис. 1. Классификация волоконно-оптических гироскопов [Источник: составлена автором]
Таблица 2
Свойства, достоинства и недостатки работы волоконно-оптических гироскопов (ВОГ) [Источник: составлено автором]
|
№ п/п |
Основные свойства ВОГ |
Основные достоинства ВОГ |
Основные недостатки ВОГ |
Проблемы, требующие научных решений |
|
1 |
Высокая чувствительность прибора |
Высокая чувствительность Отсутствие подвижных частей |
Погрешности в точности и стабильности показаний ВОГ |
Поиск методов компенсации сигналов, не связанных с вращением (цель – увеличение точности и стабильности показаний ВОГ) |
|
2 |
Малые габариты и масса конструкции |
Простота конструкций |
Быстрая реакция на изменения рынка по производству ВОГ |
Миниатюризация |
|
Окончание табл. 2 |
||||
|
№ п/п |
Основные свойства ВОГ |
Основные достоинства ВОГ |
Основные недостатки ВОГ |
Проблемы, требующие научных решений |
|
3 |
Невысокая стоимость производства и конструирования |
Короткое время запуска |
Зарубежные конкуренты (Япония и Германия) |
Снижение стоимости готового продукта |
|
4 |
Большой динамический диапазон измеряемых угловых скоростей |
Отсутствие подвижных частей |
Шум при работе ВОГ и обработке информации |
Снижение шума |
|
5 |
Отсутствие вращающихся механических элементов (роторов) и подшипников |
Высокая линейность характеристик |
Погрешности в работе ВОГ: месторасположение; |
Уменьшение погрешностей в работе ВОГ |
|
6 |
Практически мгновенная готовность к работе |
Низкая потребляемая мощность |
Ошибочные сигналы |
Алгоритмы для выделения и фильтрации ошибочных сигналов |
|
7 |
Нечувствительность к большим линейным ускорениям |
Высокая надёжность |
Х |
Х |
|
8 |
Стойкость к большим перегрузкам |
Стойкость к большим перегрузкам |
Потеря ВОГ в процессе эксплуатации |
Риск потери ВОГ |
|
9 |
Долгий срок службы |
Долгий срок службы |
Устаревание прибора |
ВОГ требует постоянной модернизации |
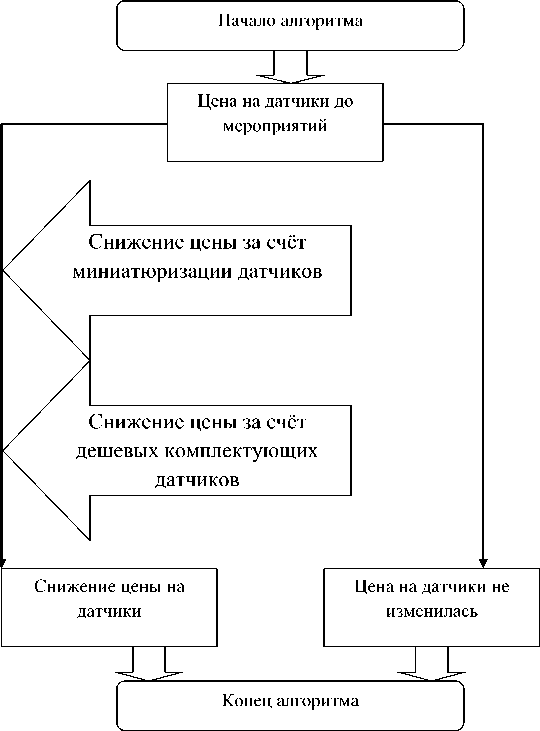
Рис. 2. Алгоритм по снижению цены на датчики (акселерометры и гироскопы) для предприятий ОПК
Рассмотрим в таблице 2 свойства, достоинства и недостатки работы волоконно-оптических гироскопов.
Из данных представленных в таблице 2 следует, что основной проблемой является риск потери волоконно-оптического гироскопа, а также, что ВОГ требует постоянной модернизацией в связи с научно-техническим прогрессом. Самой важной проблемой остаётся миниатюризация датчиков и ценовая составляющая акселерометров и гироскопов. На рисунке 2 представим авторский взгляд на решение проблемы снижения цены на датчики на предприятиях ОПК.
Из данных представленных на рисунке 2 следует, что основными путями для снижения цены на датчики являются: миниатюризация самого датчика (акселерометра, гироскопа); включение
в конструкторскую часть более дешевых комплектующих.
Заключение
Отечественные и зарубежные учёные заинтересованы в развитии конструкторской части роторно-управляемых систем, телеметрических систем, а также датчиков (акселерометров и гироскопов).
Анализ схемотехнических характеристик показал, что телеметрические системы и их составляющие миниатюризируются. Основным из аспектов, которые требуют особого внимания, авторы научных трудов называют: «цену готового продукта», так как технологии двойного назначения должны быть конкурентоспособны на мировом рынке. Цена телеметрической системы должна снижаться, но, при этом погрешности в работе системы управления минимизируются.
Список литературы Снижение цены машиностроительными предприятиями на товары двойного назначения для производственных нужд нефтегазового комплекса России (на примере акселерометров и гироскопов)
- Максюшин Г.В., Соболева Н.С. Учет погрешностей МЭМС-акселерометра при его моделировании // Политехнический молодёжный журнал. 2019. № 02. С. 1-5.
- Матвеев В.В. Инженерный анализ погрешностей бесплатформенной инерциальной навигационной системы // Приборостроение // Известия ТулГУ. Технические науки. 2014. Вып. 9. Ч. 2. С. 251-267.
- Официальный сайт Scilab. [Электронный ресурс]. URL.: www.scilab.org (дата обращения: 29.04.2020).
- Павлов Д.В., Лукин К.Г., Петров М.Н. Разработка имитационной модели MEMS-акселерометра в среде SIMULINK // Вестник Новгородского государственного университета. 2016. № 4 (95). С. 28-33.
- Пономарева С.В., Кутузова В.С., Павлович А.А. Расчёт погрешностей при работе бесплатформенной инерциальной навигационной системы на подвижных объектах // Проблемы машиностроения и автоматизации. 2020. № 1. С.92-99.
- Розенблит В.И., Буряковский В.Л., Фитерман Е.Ф., Гудман У.Л. Телеметрическая система. Патент RUS 2378509 от 27.11.2008. URL: www.elibrary.ru (дата обращения: 14.04.2020).
- Роторная управляемая система для бурения скважин. [Электронный ресурс]. URL: www.https://yandex.ru/turbo/s/xn-80aaafltebbc3auk2aepkhr3ewjpa (дата обращения: 07.06.2020).
- Салычев О.С. Способ определения навигационных параметров бесплатформенной инерциальной навигационной системой. Патент на изобретение RU 2348903 С1, 10.03.2009. Заявка № 2007141281/28 от 09.11.2007.
- Сергеев Г.В. Исследование вопросов построения телеметрических систем, использующих в качестве прототипа поднесущих колебаний некоторые системы ортогональных функций: дис.... канд. тех. наук: 05.00.00. Москва, 1968. 300 с.
- Силантьев Д.С. Модель ошибок бесплатформенной инерциальной навигационной системы летательного аппарата. Навигация и гидрография. 2016. № 45. С. 17-24.
- Терешков В.М. Прямой метод оценивания погрешностей датчиков инерциально-спутниковой навигационной системы. Труды ФГУП "НПЦАП". Системы и приборы управления. 2010. № 2. С. 8-16.
- Ткаченко А.Н., Ларионов Д.Ю., Подгорная Л.Н., Шалымов Р.В. Модель для исследования алгоритмов работы инерциальных измерительных систем. Свидетельство о регистрации программы для ЭВМ RU 2018619156, 01.08.2018. Заявка № 2018615780 от 07.06.2018.
- Турбаков М.С., Мелехин А.А., Кривощеков С.Н., Щербаков А.А. Телеметрическая система мониторинга ствола скважины. Патент RUS 2646287 от 15.05.2017. URL: www.elibrary.ru (дата обращения: 14.04.2020).
- Указ Президента Российской Федерации от 17 декабря 2011 г. № 1661 (с изменениями и дополнениями от 13.12.2018 г.). "Об утверждении Списка товаров и технологиях двойного назначения, которые могут быть использованы при создании вооружений и военной техники в отношении которых осуществляется экспортный контроль". [Электронный ресурс]. URL: www.http.base.garant.ru (дата обращения: 14.06.2020).
- Утверждение типа средств измерений. Сертификат от компании ТМС РУС. [Электронный ресурс]. URL: www.http.tms-cs.ru (дата обращения: 14.06.2020).
- Энергетическая стратегия России на период до 2030 г., утвержденная Распоряжением Правительства Российской Федерации 13 ноября 2009 г. № 1715-р. [Электронный ресурс]. URL: www.http.base.garant.ru (дата обращения: 14.06.2020).
- Хачатурян А.А., Пономарева С.В., СилинаЕ.С. Повышение качества промышленного производства путем компенсации влияния температуры на выходные параметры акселерометра в бесплатформенной инерционной навигационной системе // Информационно-экономическиеаспекты стандартизации и технического регулирования. 2018. № 6 (46). С.14.
- Челноков Ю.Н., Переляев С.Е., Челнокова Л.А. Исследованиеалгоритмов определения инерциальной ориентации движущегося объекта. Известия Саратовского университета. Новая серия. Серия: Математика. Механика. Информатика. 2016. Т. 16. № 1. С. 80-95.
- Черенков С.А., Лисин А.А. Способ определения навигационных параметров и бесплатформенная инерциальная навигационная система для его осуществления. Патент на изобретение RU 2634071, 23.10.2017. Заявка № 2016143610 от 08.11.2016.
- Чупров В.П., Будаев Д.А. Устройство для фиксации забойного блока телеметрической системы в ориентирующем переводнике бурильной колонны. Патент RUS 2603324 от 19.06.2015. [Электронный ресурс]. URL: www.elibrary.ru (дата обращения: 27.07.2020).
