Сокращенный метод калибровки фотокамеры с целью измерения расстояний

Автор: Попов Евгений Владимирович, Шеховцов Геннадий Анатольевич, Раскаткина Ольга Валерьевна
Рубрика: Инженерная геометрия и компьютерная графика
Статья в выпуске: 4 т.19, 2019 года.
Бесплатный доступ
В статье описан сокращённый метод калибровки цифровой фотокамеры с целью использования её результатов для измерения расстояний путем обработки фотоизображений. В методе используется обработка фотографий горизонтального или вертикального базиса произвольной величины, расположенного лишь в начальной и конечной точках линии известной длины. Обработка фотоснимков заключается в измерении растровых координат в пикселях левого и правого или верхнего и нижнего концов базиса с помощью любого редактора растровых изображений. Установлено, что между произведением количества таких пикселей на соответствующие им расстояния и этими расстояниями существует прямая пропорциональная зависимость. На основании этого выведены формулы для вычисления с контролем измеряемого расстояния. Описан порядок выполненной калибровки фотокамеры и приведены результаты сравнения контрольных измерений с истинными их значениями. Установлено, что разработанный метод калибровки обеспечивает достаточную точность измерения расстояний путем обработки фотоизображений.
Калибровка, цифровая фотокамера, базис, пиксель, точность
Короткий адрес: https://sciup.org/147232159
IDR: 147232159 | УДК: 624-2/-9 | DOI: 10.14529/build190409
Abbreviated method of a camera calibration for the purpose of distance measurement
An abbreviated method of a digital camera calibration for the purpose of using the results for distance measurement by means of photo images processing is described in the article. The method is based on processing photo images of horizontal or vertical basis of an arbitrary size and located only at the start and end points of a line with the known length. Photo images processing involves measurement of raster coordinates in pixels of the left and right or upper and lower ends of the basis using any raster graphics editor. It is found that there is a direct proportional dependence between the quantity product of such pixels and the distances corresponding to them, and these distances themselves. For the reasons given, formulas for calculating, with respect to the measured distance control, are derived. The procedure for calibrating the camera is described, and the results of comparing control measurements with the true values are produced. It is found that the designed calibration method provides sufficient accuracy for distance measurement by means photo images processing.
Текст научной статьи Сокращенный метод калибровки фотокамеры с целью измерения расстояний
В ряде статей [1–5] отмечены достоинства цифровой фотограмметрии, позволяющие рекомендовать её для измерений геометрических параметров пространственных объектов бесконтактными методами. В работе [6] приведён метод использования цифровых фотокамер для определения расстояния до объекта съёмки. Метод основан на геометрической интерпретации зависимости измеряемых расстояний di от количества пикселей Δ i , приходящихся на изображённый на снимках горизонтальный базис известной длины. Однако при этом для калибровки фотокамеры требуется выполнять большое количество снимков через определённый интервал расстояния, получая в результате их обработки криволинейную зависимость d i от Δ i , усложняющую процесс интерполяции при получении искомого расстояния. Калибровка фотокамеры является сложным и ответственным процессом, от результата которого зависит точность и достоверность определения геометрических параметров объекта. Изучению этого процесса посвящены исследования, описанные в работах [6–13].
В данной статье рассматривается сокращённый метод калибровки фотокамеры не только по горизонтальному, но и по вертикальному базису с целью упрощения последующей обработки результатов съёмки. Для этого предлагается вместо обобщённого коэффициента А , вычисляемого по приведенной в работе [14] формуле:
находить произведения (частные коэффициенты А i ):
А п i = d i х П i , А л i = d i х Л i ,
А н i = d i х Н i , А в i = d i х В i , (2) где П i , Л i и Н i , В i – растровые координаты курсора в пикселях, соответствующие положению на снимке правого и левого концов горизонтального базиса или нижнего и верхнего концов вертикального базиса.
Для иллюстрации разработанного метода рассмотрим результаты калибровки фотокамеры Nikon COOLPIX S9100. В качестве базисов были использованы две нивелирные 1,5-метровые рейки, скреплённые между собой в центральной их части в виде «креста» (рис. 1).
Фотокамера занимала положение в начале линии на расстоянии 3 м от её начальной точки и на высоте, равной половине рейки. Фотокамера была ориентирована на конечную точку линии так, чтобы «крест» занимал на снимке центральное положение.
В процессе моделирования было выполнено при неподвижном положении фотокамеры фотографирование «креста» через 1 м в интервале 3– 30 м горизонтальной линии. Каждую фотографию

а)
б)
Рис. 1. Схема измерения снимков по горизонтальному (а) и вертикальному (б) базису
(размером 4896×3672 пкс) выводили на экран монитора, открывали каждый файл с помощью программы Paint и, подводя курсор к левому и правому концам горизонтальной рейки, отсчитывали количество пикселей П и Л, Н и В, соответствующих каждому положению курсора (см. рис. 1). Результаты измерений снимков и их обработки для горизонтального базиса представлены в табл. 1 (графы 2, 3).
По значениям отсчётов П и Л можно определить средние отсчёты С = (П + Л)/2 (графа 4
табл. 1) и вычислить их отклонения от середины снимка р = С – 2448 (графа 5 табл. 1). Введя соответствующие поправки в отсчёты П и Л, получаем исправленные отсчёты Пи = П – р и Ли = Л – р (графа 6 и 7), приведённые к единой системе отсчётов относительно середины снимка.
Если по данным табл. 1 построить графики зависимости расстояния d от количества пикселей П и Л или Пи и Ли, то получим криволинейную зависимость (рис. 2), аналогичную работе [14], с возможностью использования формулы (1).
Таблица 1
Результаты калибровки фотокамеры Nikon COOLPIX S9100 и контрольные замеры по горизонтальному базису
|
d , м |
Отсчёты по курсору, пкс |
Поправка и исправленные отсчёты, пкс |
Коэффициенты, м х пкс |
d выч, м |
d в– d , м |
|||||
|
П |
Л |
С |
р |
Пи |
Ли |
А Пи |
А Ли |
|||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
3 |
3354 |
1402 |
2378 |
–70 |
3424 |
1472 |
10272 |
4416 |
3,00 |
0,00 |
|
4 |
3133 |
1674 |
2404 |
–45 |
3178 |
1719 |
12710 |
6874 |
4,01 |
0,01 |
|
5 |
2989 |
1828 |
2409 |
–40 |
3029 |
1868 |
15143 |
9338 |
5,03 |
0,03 |
|
6 |
2892 |
1927 |
2410 |
–39 |
2931 |
1966 |
17583 |
11793 |
6,05 |
0,05 |
|
7 |
2822 |
1995 |
2409 |
–40 |
2862 |
2035 |
20031 |
14242 |
7,05 |
0,05 |
|
8 |
2780 |
2057 |
2419 |
–30 |
2810 |
2087 |
22476 |
16692 |
8,06 |
0,06 |
|
9 |
2737 |
2096 |
2417 |
–32 |
2769 |
2128 |
24917 |
19148 |
9,08 |
0,08 |
|
10 |
2704 |
2126 |
2415 |
–33 |
2737 |
2159 |
27370 |
21590 |
10,06 |
0,06 |
|
11 |
2684 |
2160 |
2422 |
–26 |
2710 |
2186 |
29810 |
24046 |
11,09 |
0,09 |
|
12 |
2667 |
2187 |
2427 |
–21 |
2688 |
2208 |
32256 |
26496 |
12,09 |
0,09 |
|
13 |
2650 |
2206 |
2428 |
–20 |
2670 |
2226 |
34710 |
28938 |
13,06 |
0,06 |
|
14 |
2633 |
2221 |
2427 |
–21 |
2654 |
2242 |
37156 |
31388 |
14,06 |
0,06 |
|
15 |
2622 |
2239 |
2431 |
–18 |
2640 |
2257 |
39593 |
33848 |
15,11 |
0,11 |
|
16 |
2608 |
2248 |
2428 |
–20 |
2628 |
2268 |
42048 |
36288 |
16,06 |
0,06 |
|
17 |
2598 |
2260 |
2429 |
–19 |
2617 |
2279 |
44489 |
38743 |
17,08 |
0,08 |
|
18 |
2591 |
2271 |
2431 |
–17 |
2608 |
2288 |
46944 |
41184 |
18,03 |
0,03 |
|
19 |
2582 |
2278 |
2430 |
–18 |
2600 |
2296 |
49400 |
43624 |
18,96 |
–0,04 |
|
20 |
2576 |
2288 |
2432 |
–16 |
2592 |
2304 |
51840 |
46080 |
19,99 |
–0,01 |
|
21 |
2571 |
2298 |
2435 |
–14 |
2585 |
2312 |
54275 |
48542 |
21,07 |
0,07 |
|
22 |
2564 |
2303 |
2434 |
–15 |
2579 |
2318 |
56727 |
50985 |
22,02 |
0,02 |
|
23 |
2562 |
2312 |
2437 |
–11 |
2573 |
2323 |
59179 |
53429 |
22,96 |
–0,04 |
|
24 |
2554 |
2314 |
2434 |
–14 |
2568 |
2328 |
61632 |
55872 |
23,90 |
–0,10 |
Окончание табл. 1
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
24 |
2554 |
2314 |
2434 |
–14 |
2568 |
2328 |
61632 |
55872 |
23,90 |
–0,10 |
|
25 |
2550 |
2320 |
2435 |
–13 |
2563 |
2333 |
64075 |
58325 |
24,91 |
–0,09 |
|
26 |
2547 |
2326 |
2437 |
–12 |
2559 |
2338 |
66521 |
60775 |
25,90 |
–0,10 |
|
27 |
2543 |
2331 |
2437 |
–11 |
2554 |
2342 |
68958 |
63234 |
26,97 |
–0,03 |
|
28 |
2540 |
2336 |
2438 |
–10 |
2550 |
2346 |
71400 |
65688 |
28,00 |
0,00 |
|
29 |
2536 |
2340 |
2438 |
–10 |
2546 |
2350 |
73834 |
68150 |
29,11 |
0,11 |
|
30 |
2528 |
2338 |
2433 |
–15 |
2543 |
2353 |
76290 |
70590 |
30,00 |
0,00 |
|
Контрольные замеры |
||||||||||
|
5,47 |
2956 |
1896 |
2426 |
–22 |
2978 |
1918 |
14890 |
9590 |
5,51 |
0,04 |
|
9,21 |
2744 |
2114 |
2429 |
–19 |
2763 |
2133 |
24867 |
19197 |
9,24 |
0,03 |
|
15,54 |
2616 |
2244 |
2430 |
–18 |
2634 |
2262 |
39510 |
33930 |
15,55 |
0,01 |
|
22,19 |
2558 |
2299 |
2429 |
–20 |
2578 |
2319 |
56705 |
51007 |
22,18 |
–0,01 |
|
26,37 |
2535 |
2318 |
2427 |
–22 |
2557 |
2340 |
66469 |
60827 |
26,36 |
–0,01 |
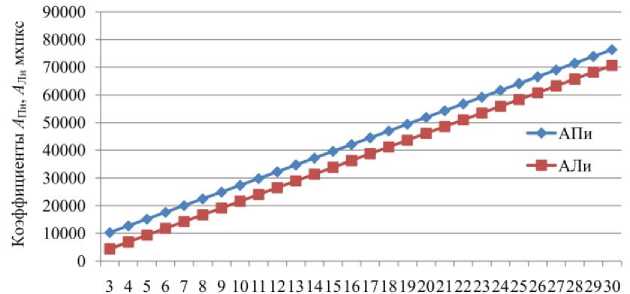
По данным табл. 1 подсчитаем по формулам (2) коэффициенты А Пи , А Ли (графы 8 и 9). По их значениям построим графики зависимости А от расстояния d (рис. 3), представляющие собой прямые параллельные линии.
Как видно из рис. 3, зависимость А от d носит прямолинейный характер, поэтому на практике можно ограничиться определением А Н и А К всего по двум фотографиям базиса в начале и в конце контролируемого участка, а размер любого коэффициента А i может быть найден по формуле
( d i - d н ) ( A K - А н ) A i = A H + z , ,
( d к - d н )
где А i , А Н и А К – размер коэффициента А соответственно на расстоянии di , d н и d к.
Прямолинейная зависимость А от d позволяет максимально упростить не только процесс калибровки фотокамеры, но и методику измерения и вычисления расстояний по горизонтальному базису. Действительно, если обозначим в формуле (3) А i = d i П i или А i = d i Л i , а также выразим
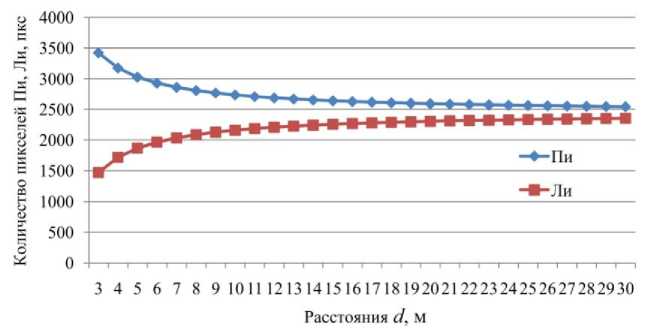
Рис. 2. Зависимость расстояния d от количества пикселей П и и Л и
Расстояния d, м
Рис. 3. Зависимость коэффициентов А Пи и А Ли от расстояния d
k п
A — A A - A кп нп кл нл d–d, л d–d, кн кн
то после соответствующих преобразований получим формулы:
. AПи. - dнkn AЛи. - dнkл di = i---------=-----i---------,
Пи i - k п Ли i - k л
причём по обеим формулам будем получать одно и то же значение d .
Обратим также внимание на то, что полусумма ( k п + k л )/2 должна равняться по модулю постоянному числу (у нас 2448), участвующему в вычислении поправок р (графа 5 табл. 1). В нашем примере ( d K – d H) = 27 м, А кп = 76290 пкс, А нп = 10272 пкс, k п = 2445,111 пкс/м, А кл = 70590 пкс, А нл = 4416 пкс, k л = 2450,889 пкс/м, а полусумма ( k п + k л )/2 = 2448.
Для оценки точности разработанного метода были вычислены с помощью формул (5) при найденных коэффициентах (4) расстояния d выч (графа 10), и полученные результаты сравнены с соответствующими им табличными значениями d .
По разностям (dвыч – d) были найдены ошибки (графа 11), которые в диапазоне расстояний 3–30 м находилась в пределах от – 0,03 до +0,11 м, что в процентном отношении представлено на рис. 4, откуда следует, что относительная ошибка вычисления расстояний по формулам (5) не превышает 1 %, что является удовлетворительным.
Таким образом, для определения расстояния от фотокамеры до горизонтального базиса, расположенного в заданной точке съёмки, достаточно его сфотографировать, а затем в редакторе растровых изображений с помощью курсора измерить растровые координаты точек П и Л (см. рис. 1а). Результаты описанной обработки фотоснимков при контрольных замерах пяти произвольных расстояний представлены в табл. 1, при этом точность измерения находилась в пределах от –0,01 до +0,04 м.
Результаты измерений на базе фотоснимков для вертикального базиса (см. рис. 1б) представлены в табл. 2 (графы 2 и 3). Обработка снимков по изложенному выше методу заключалась в определении средних отсчётов С = (Н + В)/2 (графа 4), вычислении поправок р = С – 1836 (графа 5) и нахождении исправленных отсчётов Н и = Н – р и В и = В – р (графа 6 и 7).

Таблица 2
Результаты калибровки фотокамеры Nikon COOLPIX S9100 и контрольные замеры по вертикальному базису
|
d , м |
Отсчёты по курсору, пкс |
Поправка и исправленные отсчёты, пкс |
Коэффициенты, м х пкс |
d выч, м |
d в – d , м |
|||||
|
Н |
В |
С |
р |
Ни |
Ви |
А Ни |
А Ви |
|||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
3 |
2840 |
872 |
1856 |
20 |
2820 |
852 |
8460 |
2556 |
3,00 |
0,00 |
|
4 |
2582 |
1115 |
1849 |
13 |
2570 |
1103 |
10278 |
4410 |
4,02 |
0,02 |
|
5 |
2433 |
1266 |
1850 |
14 |
2420 |
1253 |
12098 |
6263 |
5,05 |
0,05 |
|
6 |
2338 |
1362 |
1850 |
14 |
2324 |
1348 |
13944 |
8088 |
6,03 |
0,03 |
|
7 |
2260 |
1428 |
1844 |
8 |
2252 |
1420 |
15764 |
9940 |
7,07 |
0,07 |
|
8 |
2210 |
1483 |
1847 |
11 |
2200 |
1473 |
17596 |
11780 |
8,08 |
0,08 |
|
9 |
2164 |
1520 |
1842 |
6 |
2158 |
1514 |
19422 |
13626 |
9,12 |
0,12 |
|
10 |
2133 |
1553 |
1843 |
7 |
2126 |
1546 |
21260 |
15460 |
10,11 |
0,11 |
|
11 |
2108 |
1580 |
1844 |
8 |
2100 |
1572 |
23100 |
17292 |
11,10 |
0,10 |
|
12 |
2083 |
1599 |
1841 |
5 |
2078 |
1594 |
24936 |
19128 |
12,10 |
0,10 |
|
13 |
2065 |
1618 |
1842 |
6 |
2060 |
1613 |
26774 |
20963 |
13,09 |
0,09 |
|
14 |
2046 |
1631 |
1839 |
3 |
2044 |
1629 |
28609 |
22799 |
14,08 |
0,08 |
|
15 |
2031 |
1644 |
1838 |
2 |
2030 |
1643 |
30443 |
24638 |
15,09 |
0,09 |
|
16 |
2015 |
1652 |
1834 |
–3 |
2018 |
1655 |
32280 |
26472 |
16,07 |
0,07 |
Окончание табл. 2
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
17 |
2009 |
1668 |
1839 |
3 |
2007 |
1666 |
34111 |
28314 |
17,09 |
0,09 |
|
18 |
2000 |
1678 |
1839 |
3 |
1997 |
1675 |
35946 |
30150 |
18,09 |
0,09 |
|
19 |
1990 |
1685 |
1838 |
2 |
1989 |
1684 |
37782 |
31987 |
19,08 |
0,08 |
|
20 |
1981 |
1690 |
1836 |
–1 |
1982 |
1691 |
39630 |
33810 |
19,98 |
–0,02 |
|
21 |
1974 |
1698 |
1836 |
0 |
1974 |
1698 |
41454 |
35658 |
21,04 |
0,04 |
|
22 |
1967 |
1704 |
1836 |
–1 |
1968 |
1705 |
43285 |
37499 |
22,06 |
0,06 |
|
23 |
1960 |
1709 |
1835 |
–2 |
1962 |
1711 |
45115 |
39342 |
23,09 |
0,09 |
|
24 |
1956 |
1714 |
1835 |
–1 |
1957 |
1715 |
46968 |
41160 |
23,94 |
–0,06 |
|
25 |
1949 |
1717 |
1833 |
–3 |
1952 |
1720 |
48800 |
43000 |
24,94 |
–0,06 |
|
26 |
1941 |
1719 |
1830 |
–6 |
1947 |
1725 |
50622 |
44850 |
26,04 |
0,04 |
|
27 |
1938 |
1725 |
1832 |
–5 |
1943 |
1730 |
52448 |
46697 |
27,11 |
0,11 |
|
28 |
1935 |
1728 |
1832 |
–5 |
1940 |
1733 |
54306 |
48510 |
27,88 |
–0,12 |
|
29 |
1932 |
1734 |
1833 |
–3 |
1935 |
1737 |
56115 |
50373 |
29,11 |
0,11 |
|
30 |
1930 |
1738 |
1834 |
–2 |
1932 |
1740 |
57960 |
52200 |
30,00 |
0,00 |
|
Контрольные замеры |
||||||||||
|
5,47 |
2362 |
1296 |
1829 |
–7 |
2369 |
1303 |
11845 |
6515 |
5,53 |
0,06 |
|
9,21 |
2145 |
1511 |
1828 |
–8 |
2153 |
1519 |
19377 |
13671 |
9,26 |
0,05 |
|
15,54 |
2016 |
1641 |
1829 |
–8 |
2024 |
1649 |
30353 |
24728 |
15,57 |
0,03 |
|
22,19 |
1960 |
1698 |
1829 |
–7 |
1967 |
1705 |
43274 |
37510 |
22,14 |
–0,05 |
|
26,37 |
1934 |
1715 |
1825 |
–12 |
1946 |
1727 |
50583 |
44889 |
26,39 |
0,02 |
Если по значениям исправленных отсчётов построить графики зависимости расстояний d от количества пикселей Н и и В и (рис. 5), то получим аналогичную рис. 2 их криволинейную зависимость с возможностью использования формулы (1).
Если по подсчитанным по формулам (2) коэффициентам АНи и АВи (графы 8 и 9) построить графики зависимости А от расстояния d (рис. 6), то аналогично рис. 3 получим прямые параллель- ные линии.
При использовании вертикального формулы (4) и (5) принимают вид:
A - A A - A кн нн кв нв н d–d, в d–d, кн кн
-
. A Ни - d н k н A Ви,. - d н k в
-
d, = i ----------= i ---------.
Ниi - kн Виi - kв базиса
По формулам (6), в которых ( d K – d H) = 27 м, А кн = 57960 пкс, А нн = 8460 пкс, А кв = 52200 пкс,
А нв = 2556 пкс, определяем k н = 1833,333 пкс/м и k в = 1838,667пкс/м с контролем ( k н + k в)/2 = 1836.
В графе 10 табл. 2 представлены расстояния d выч , вычисленные по формулам (7) с учётом коэффициентов (6). По разностям ( d выч – d ) найдены ошибки (графа 11), которые в диапазоне расстояний 3–30 м оказались в пределах от –0,12 до +0,12 м, что в процентном отношении иллюстрируется графиком на рис. 7. Из графика следует, что относительная ошибка вычисления расстояний по формулам (7) не превышает 1,3 %, что, как и в случае использования горизонтального базиса, является удовлетворительным.
Таким образом, аналогично использованию горизонтального базиса для определения расстояния от фотокамеры до вертикального базиса расположенного в заданной точке съёмки, достаточно на фотоснимке в любом редакторе растровых изображений измерить с помощью курсора растровые координаты в пикселах точек Н и В (см. рис. 1б).
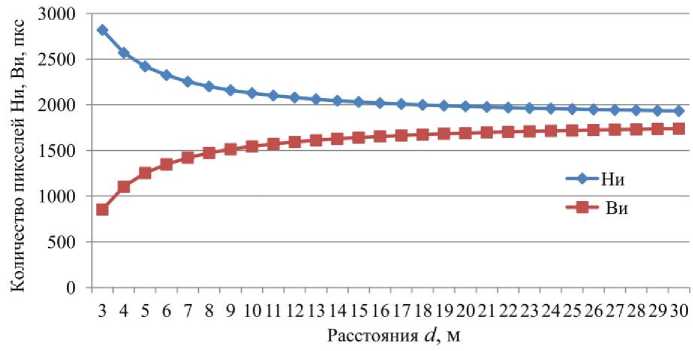
Рис. 5. Зависимость расстояния d от количества пикселей Н и и В и
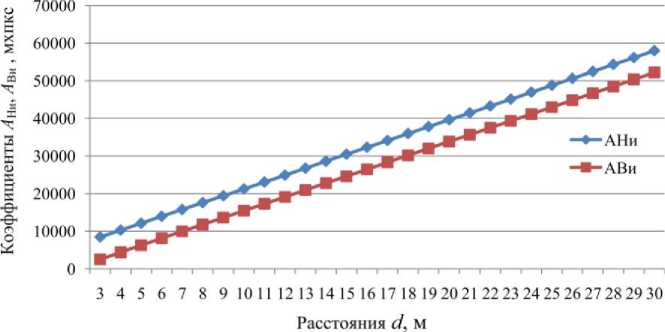
Рис. 6. Зависимость коэффициентов А Ни и А Ви от расстояния d
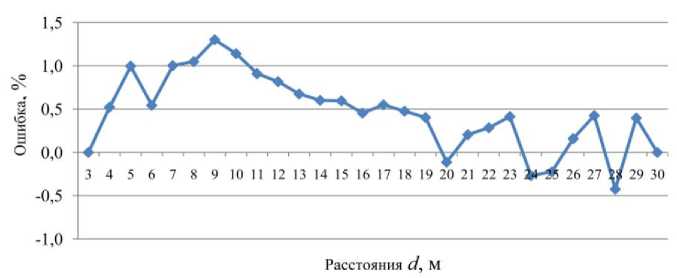
Рис. 7. Зависимость ошибки вычисления расстояния d по формулам (7) для вертикального базиса
Как показали контрольные замеры пяти произвольных расстояний (см. табл. 2), точность измерения не выходила за пределы диапазона от –0,05 до +0,06 м.
Следует отметить, что использование горизонтального или вертикального базиса позволяет производить контроль вычислительных операций по полусумме коэффициентов k п и k л или k н и k в и при этом получать два одинаковых значения искомого расстояния, что подтверждает точность предлагаемого метода.
Заключение
Выполненные контрольные измерения доказали применимость и эффективность разработанного сокращенного метода калибровки цифровой фотокамеры с целью определения расстояний путем обработки фотоснимков. В частности, метод может быть использован при определении деформаций инженерных сооружений. Разработанный бесконтактный метод измерения расстояний путем обработки фотоснимков не требует дорогостоящего оборудования и высокой квалификации исполнителей в силу своей простоты. Перспективным является использование функции приближения фотокамеры (Zoom) для повышения точности и дальности измерений.
Список литературы Сокращенный метод калибровки фотокамеры с целью измерения расстояний
- Уставич, Г.А. О применении неметрических цифровых камер для инженерно-геодезических измерений / Г.А. Уставич, Я.Г. Пошивайло // Геодезия и картография. - 2005. - № 8. - С. 19-24.
- Кацарский, И.С. О цифровой фотограмметрии и перспективах её применения / И.С. Кацарский // Геопрофи. - 2006. - № 6. - С. 4-8.
- Барсуков, К.Г. Исследование возможностей неметрических цифровых фотоаппаратов при решении инженерно-строительных задач / К.Г. Барсуков // Научный вестник Воронежского государственного архитектурно-строительного университета. - 2007. - № 3. - С. 82-85.
- Джарроуш, Д. Бытовая цифровая камера как инструмент для точных геодезических измерений / Д. Джарроуш // Геопрофи. - 2014. - № 4. - С. 46-49.
- Bernasik, J. Automatyzacja fotogrametrycznych pomiarów odkształceń dachowych dźwigarów hal przemysłowych / J. Bernasik, M. Sławomir // Geodezja. - 2006. - № 12 (2). - S. 141-149.
- Калибровка цифровой фотокамеры с целью измерения расстояний / Е.В. Попов, Г.А. Шеховцов, Р.П. Шеховцова, Ю.Н. Раскаткин // Приволжский научный журнал. - 2015. - № 4. - С. 131-140.
- Раскаткина, О.В. Методические и классификационные аспекты контроля пространственного положения сооружений башенного типа / О.В. Раскаткина // Третья междунар. науч.-практ. конф. "Фундаментальные и прикладные исследования: новое слово в науке", г. Москва, 16 мая 2016 г.: сб. науч. докл. - М., 2016. - С. 58-77.
- Раскаткина, О.В. Современные методы определения параметров пространственного положения и формы строительных конструкций / О.В. Раскаткина, Ю.Н. Раскаткин // Материалы междунар. науч.-практ. конф. "Наука и образование: векторы развития". - Чебоксары, 2016. - С. 272-296.
- Раскаткина, О.В. Об оптимизации фотографического способа контроля вертикальности промышленных дымовых труб / О.В. Раскаткина // Третья междунар. науч.-практ. конф. "Фундаментальные и прикладные исследования: новое слово в науке", г. Москва, 16 мая 2016 г.: сб. науч. докл. - М., 2016. - С. 78-91.
- Раскаткина, О.В. О методике и результатах моделирования бесконтактного фотографического способа измерения расстояний / О.В. Раскаткина // Вестник современных исследований. - 2019. - № 1-3 (28). - С. 163-170. - http://old. orcacenter.ru/journals/modern-research/ mr.2019.01.03.pdf
- Гельман, Р.Н. Лабораторная калибровка камер с большой дисторсией / Р.Н. Гельман, А.Л. Дунц // Геодезия и картография. - 2002. - № 7. - С. 23-31.
- Никишин, Д.А. Методы и результаты калибровки малоформатных цифровых камер с трансфокатором / Д.А. Никишин // Изв. вузов. Сер. "Геодезия и аэрофотосъёмка". - 2003. - № 4. - С. 100-107.
- Могильный, С.Г. Конструктивная калибровка цифровой камеры / С.Г. Могильный, А.А. Шоломицкий, А.А. Лунев // Изв. вузов. Сер. "Геодезия и аэрофотосъёмка". - 2011. - № 2. - С. 62-66.
- Шеховцов, Г.А. О методике и результатах калибровки фотокамер с целью измерения расстояний / Г.А. Шеховцов, Р.П Шеховцова, Ю.Н. Раскаткин // Геодезия и картография. - 2016. - № 2. - С. 46-53.
