Состав и структура автономных систем навигации и управления роботизированного прототипа автомобиля

Автор: Козорез Дмитрий Александрович, Кружков Дмитрий Михайлович
Журнал: Спецтехника и связь @st-s
Статья в выпуске: 3, 2012 года.
Бесплатный доступ
В статье приведен обзор разработанного бортового комплекса прототипа автомобиля, имеющего в составе комплексированную навигационную систему и систему управления, предназначенного для автономного перемещения на пересеченной местности по заданным точкам маршрута.
Спутниковая навигация; инерциальная навигация; комплексирование; автономная система управления; автомобиль
Короткий адрес: https://sciup.org/14967096
IDR: 14967096
Текст научной статьи Состав и структура автономных систем навигации и управления роботизированного прототипа автомобиля
Массовое внедрение систем автономной навигации и управления на средствах автотранспорта – вопрос времени. Уже сегодня создано большое число подобных прототипов, разрабатываются новые системы, расширяется список решаемых задач. В настоящее время никого уже не удивить автоматически паркующимися и передвигающимися по размеченному дорожному полотну автомобилями. Однако комплексное решение задачи перемещения на произвольной местности по заданному в виде координат (долготы и широты) маршруту пока отсутствует. Нет готовых решений, которые бы активно демонстрировались на рынке и обладали такими качествами, как надежность, переносимость, доступность. Поэтому исследование в данной области робототехники представляет особую важность.
Разработка прототипа
В рамках соревнований «Робокросс – 2011» Лабораторией робототехники 7 факультета МАИ была проведена разработка прототипа роботизированного легкового автомобиля на базе Иж «Ода» [1], способного осуществлять движение по заданным точкам маршрута. Прототип был оснащен автономными системами навигации и управления, состоявшими из ком-плексированной системы навигации, системы автоматического управления, блока контроллера PXI и рулевых машин с приводами.
Состав прототипа
Состав разработанного для решения целевой задачи бортового оборудования можно условно разделить на несколько крупных блоков, изображенных на рис. 1 .
Информационным ядром автономной роботизированной системы автомобиля являются блоки навигации и управления. Связь между блоками обеспечивается проводными соединениями по интерфейсу RS-232, являющимся стандартным для организации информационного обмена между периферийными устройствами различных типов. Рассмотрим состав и структуру блоков бортового комплекса более подробно.
Навигационная система
В качестве поставщика навигационной информации для автоматической си-
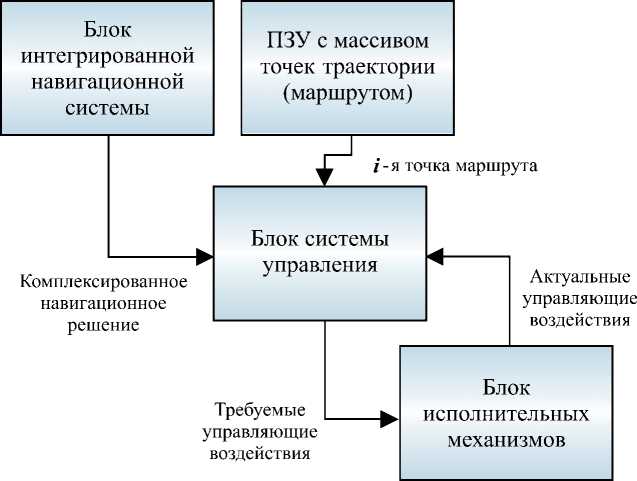
Рис. 1. Архитектура бортового комплекса
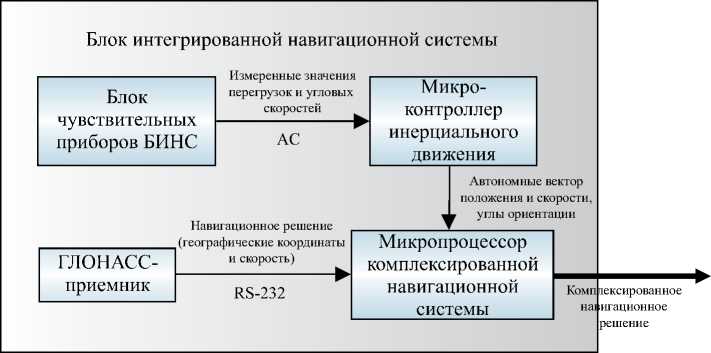
Рис. 2. Интегрированная навигационная система
стемы управления была выбрана ком-плексированная система, интеграция данных в которой осуществляется по слабосвязанной схеме [2, 3]. Состав интегрированной навигационной системы представлен на рис. 2 .
Выбор слабосвязанной схемы ком-плексирования обусловлен относительной простотой реализации [2], возможностью использования стандартных компонентов – источников на- вигационной информации, а именно: блока бесплатформенной инерциальной навигационной системы (БИНС) [4] и приемника глобальной навигационной спутниковой системы (ГНСС) ГЛОНАСС [5]. Рассмотрим состав данных блоков более подробно.
Блок БИНС данной системы включает в себя микромеханические приборы – гироскопы и датчики угловых скоростей [4]. Данный блок генерирует решение навигационной задачи путем обработки измерений чувствительных приборов в микроконтроллере. Обработка заключается в интегрировании контроллером дифференциальных уравнений прогноза движения объекта с последующим переводом фазового вектора в географическую систему координат. Как известно [2], основным недостатком БИНС является неограниченный рост во времени ошибок определения навигационных параметров. Для компенсации этого недостатка интегрированная система навигации использует ГНСС – приемник, определяющий координаты и скорость прототипа в пространстве с частотой 1 Гц, используемые в дальнейшем для получения поправок к навигационному решению, вырабатываемому БИНС. Поправки к навигационному решению формируются в микроконтроллере навигационной системы путем обработки измерений линейным фильтром Калмана [2, 3], фазовый вектор которого включает:
-
□ вектор ошибок БИНС в определении координат;
-
□ вектор ошибок БИНС в определении скорости;
-
□ ошибки ориентации сопровождающего трехгранника;
-
□ систематические ошибки измерений акселерометров;
-
□ систематические ошибки измерений ДУСов.
При этом модель измерения фильтра имеет канонический линейный вид [синяя книга]:
Вектор измерений, в зависимости от используемого источника навигационных данных, составлен из следующих компонент.
-
1 В случае использования измерений БИНС:
-
а) перегрузки по осям сопровождающего объект трехгранника;
-
б) абсолютные угловые скорости, измеренные в той же системе координат, что и перегрузки.
-
2 В случае использования ГНСС измерений:
-
а) вектор географических координат, включающий высоту, долготу и широту;
-
б) вектор скорости.
Вектор измерений используется в канонических уравнениях [2] коррекции текущих координат и скорости, а также ошибок БИНС интегральным фильтром с использованием матрицы наблюдаемости (матрицы частных производных уравнений движения автомобиля).
В итоге интегрированная навигационная система прототипа с частотой 10 Гц поставляет навигационные данные о текущем положении и скорости автомобиля системе автоматического управления с точностью не ниже точности ГНСС-приемника ( σ = 6 м).
Необходимо отметить, что одним из существенных факторов, снижающих точность навигационных определений, является смещение точки установки чувствительных элементов БИНС на прототип относительно его центра масс. Для минимизации влияния данного фактора, Лабораторией робототехники 7 факультета МАИ была разработана обобщенная компоновочная твердотельная 3D-модель легкового автомобиля [1, 6]. При помощи данной модели определялось положение центра масс прототипа и впоследствии монтировался блок БИНС. Кроме того, в настоящее время данная модель дорабатывается в целях проведения процесса имитационного моделирования и отработки исполнительных устройств прототипа.
Система автоматического управления
Критериями успешности выполнения основного задания конкурса «Робо-кросс» являются точность следования маршруту и время, затраченное на его прохождение. Для минимизации времени прохождения маршрута, перед началом движения оптимизировалась траектория прототипа. Критерием оптимальности выступали два параметра: общая длина предполагаемого пути в ходе выполнения задания и минимальная сумма углов поворота между отрезками, соединяющими соседние точки маршрута. Второй критерий обусловлен ограничениями маневренных возможностей прототипа. Оптимизация траектории выполняется в блоке управления ( рис. 3 ).
Программа оптимизации движения прототипа определяет последовательность прохождения точек маршрута. Здесь необходимо отметить, что ввод точек маршрута может осуществляться как вручную – в текстовый файл, – так и с помощью специальной про-
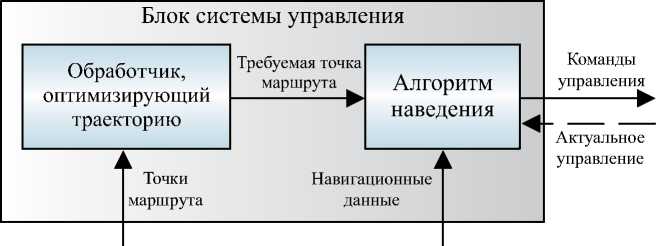
Рис. 3. Система управления
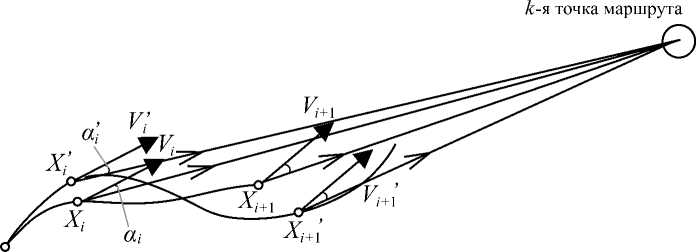
Рис. 4. Схема работы системы наведения
граммы автономной съемки местности с использованием ГЛОНАСС-прием-ника.
В силу того, что в задании конкурса не регламентирована трасса прохождения маршрута, а учитываются лишь его контрольные точки, задача управления прототипом фактически сводилась к задаче последовательного наведения. Коллективом разработчиков был реализован так называемый метод «погони» [7], при котором система автоматического управления в каждый момент времени осуществляет наведение на целевую точку маршрута путем минимизации рассогласования между текущим вектором скорости прототипа и направлением на точку.
Сигнал, вырабатываемый системой управления, пропорционален углу рассогласования, косинус которого характеризует величину промаха, а синус – направление его углового отклонения в топоцентрической системе координат. Благодаря использованию угла в качестве параметра наведения минимизируется влияние шумовых составляющих, присутствующих в фазовом векторе. Геометрическая схема процесса наведения представлена на рис. 4.
Как следует из схемы ( рис. 4 ), появление шумовых составляющих при определении положения и скорости центра масс вызывает незначительное увеличение ошибки угловой меры Δα = αi – αi’ , что позволяет избегать перерегулирования в канале управления курсом прототипа. Однако при приближении к точке цели Δα будет расти в силу увеличения отношения ошибок определения координат к дальности до точки маршрута. В этой связи при уменьшении дальности до уровня 3σ ошибок определения координат ГНСС-приемником управление обнуляется (рулевые колеса возвращаются в положение «0»). Движение прототипа к точке маршрута продолжается до достижения минимума дальности до нее. После этого точка маршрута считается пройденной.
Движение
Блок исполнительных механизмов
Для движения прототипа по маршруту необходимо управлять исполнительными механизмами (ИМ), а именно: ИМ рулевых колес, ИМ акселератора, ИМ педалей сцепления и тормоза. Схема управления ИМ приведена на рис. 5 .
Как указывалось выше, величина угла поворота колес определяется соответствующим сигналом управления требуемого изменения угла курса. Это значение передается в PXI-контроллер, который пересчитывает полученное значение в соответствии с заданным коэффициентом усиления ИМ, формируя потребную величину отклонения рулевых колес. При этом угол фактического поворота руля контролируется датчиком обратной связи, сигнал с которого обрабатывается PXI-контроллером и передается в систему управления в виде текущего значения угла поворота автомобиля (курса).
Таков алгоритм управления направлением движения прототипа по траектории. Для выполнения стандартных операций, таких как троганье с места, остановка машины, – были разработаны автономные подпрограммы, выполняемые PXI-контроллером самостоятельно. Эти подпрограммы управляют единым блоком, связанным с педалями прототипа. В момент троганья запускается программа дозировки газа и плавного отпускания сцепления и тормоза. При выполнении подпрограммы оста-

команды
Команда на отклонения руля
обмен с системой
управления
Электроусилитель
Контроллер
Сигнал о текущем положении рулевого колеса
Рис. 5. Исполнительные механизмы
новки педаль сцепления выжимается одновременно с тормозом, педаль акселератора при этом полностью отпускается. Запуск подпрограмм активируется системой управления посредством подачи специальных команд в порт: 0 – остановка, 1 – движение, 2 – троганье с места.
Результаты
Проведенные ходовые испытания роботизированного прототипа подтвердили работоспособность бортовых алгоритмов, а также правильность компоновки всех подсистем. В частности, навигационная система прототипа в штатном режиме с частотой 10 Гц вырабатывала навигационное решение с максимальной ошибкой порядка 6 метров (σ), что является достаточным для выполнения прототипом целевой функции. Система управления выдавала корректные команды с задержкой, не превышающей 0,25 с. Сбоев при выполнении стандартных операций, таких как троганье с места и остановок прототипа, в том числе аварийных, не отмечено. К выявленным недостаткам стоит отнести запаздывания отработки команд в работе ИМ, однако все они локализованы и учтены при создаваемой в настоящее время второй версии прототипа.
В целом, подводя итог, можно утверждать, что разработанные автономные системы навигации и управления состоятельны, доказали свою работоспособность и пригодны для выполнения задачи автономного перемещения на произвольной местности по заданному маршруту прототипа роботизированного автомобиля ■
Список литературы Состав и структура автономных систем навигации и управления роботизированного прототипа автомобиля
- Иж-2126 «Ода», Иж-2717, Иж-21261 «Фабула», Иж-21271. Руководство по эксплуатации, техническому обслуживанию и ремонту./С. Погребной, И. Семенов, А. Гудков, А. Гудков. -М.: Третий Рим, 2005.
- Современные информационные технологии в задачах навигации и наведения беспилотных маневренных летательных аппаратов./Под редакцией М.Н. Красильщикова и Г.Г. Себрякова. -М.: Физматлит, 2009.
- Жуковский А.П., Расторгуев В.В. Комплексные системы навигации и управления самолетов. -М.: МАИ, 1998.
- Помыкаев И.И., Селезнев В.П., Дмитроченко Л.А. Навигационные приборы и системы. -М.: Машиностроение, 1983.
- Глобальная спутниковая навигационная система ГЛОНАСС./Под редакцией В.Н. Харисова, А.И. Перова, В.А.Болдина. -М.: ИПРЖР, 1998.
- SolidWorks 2007. Дударева Н.Ю. -СПб.: БХВ-Петербург, 2007.
- Лебедев А.А., Чернобровкин Л.С. Динамика полета беспилотных летательных аппаратов. -М.: Машиностроение, 1973.
