Составление математической модели аксиально-поршневого гидромотора

Автор: Чаплыгин К.В., Яцун С.Ф.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и промышленность
Статья в выпуске: 5-2 т.11, 2009 года.
Бесплатный доступ
В статье рассматривается построение математической модели гидромотора, позволяющей проводить исследование процесса работы гидростатической трансмиссии, как в штатных, так и в нештатных режимах работы, а также воспроизводить возможные дефекты и разрушения деталей мотора.
Гидромотор, диагностика, математическая модель, дефект, разрушение
Короткий адрес: https://sciup.org/148198744
IDR: 148198744 | УДК: 531.3
Mathematical modeling of axial-piston hydromotor
In article construction of mathematical model of the hydromotor, allowing to carry out research of work-ing process of hydrostatical transmission, both in regular and supernumerary operating modes, and also to reproduce possible defects and destructions of motor details is observed.
Текст научной статьи Составление математической модели аксиально-поршневого гидромотора
во внедрении новых способов на основе инновационных технологий диагностики и анализа работоспособности гидроприводов. Для создания подобных устройств необходимо найти оптимальную запись математической модели гидропривода с возможными допустимыми упрощениями с одной стороны и с достаточным количеством параметров для ее более полного отображения с другой.
Цель работы: построение математической модели гидронасоса, позволяющей проводить исследование процесса работы гидростатической трансмиссии, как в штатных, так и в нештатных режимах работы, а также воспроизводить возможные дефекты и разрушения деталей гидропривода, что крайне важно при построении диагностической аппаратуры, основанной на методах неразборной диагностики и неразрушающего контроля.
Принцип работы гидростатической трансмиссии заключается в следующем: двигатель вращает вал насоса вместе с жестко соединенным с ним блоком цилиндров (рис. 1). Расположенный под углом к плоскости вращения обоймы опорный диск вызывает осевое перемещение опирающихся на него поршней. При этом рабочая жидкость из магистрали низкого давления попадает в полости, которые образуются в результате удаления поршней от распределительного диска. В процессе вращения блока цилиндров поршни начинают нагнетать жидкость в магистраль высокого давления. По ней жидкость попадает в рабочие камеры гидромотора, где ее давление передается на торцовые поверхности поршней, вызывая их перемещение в осевом направлении. Скользя по опорному диску, поршни устремляют за собой блок цилиндров, который жестко связан с выходным валом. Таким образом, на валу формируется крутящий момент. Пройдя рабочие камеры гидромотора, рабочая жидкость вновь возвращается в магистраль низкого давления. Расчетная схема гидромотора представлена на рис. 2.
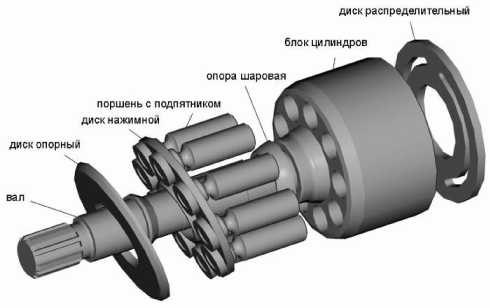
Рис. 1. Основные детали аксиальнопоршневого гидромотора и гидронасоса
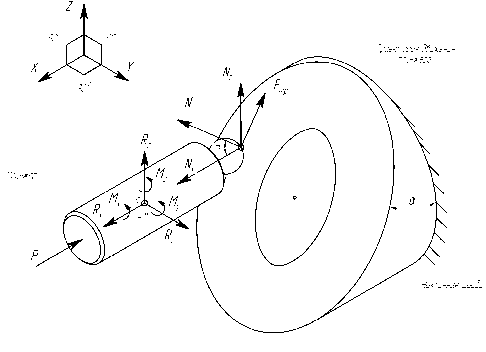
Рис. 2. Расчетная схема аксиальнопоршневого гидромотора
С одной стороны плунжер опирается на неподвижную наклонную шайбу, с другой на него действует сила Р, создаваемая давлением рабочей жидкости, которая поступает из магистрали высокого давления. В точке контакта плунжера и наклонной шайбы возникают 2 силы: нормальная сила реакции N, направленная перпендикулярно наклонной шайбе, и сила трения Fтр, которая является силой граничного трения, то есть представляет собой совокупность сил сухого и вязкого трения. Соотношение и величина составляющих сил трения зависит от степени износа наклонной шайбы, подпятника, плунжерной пары, качества рабочей жидкости, режима работы и т.д.
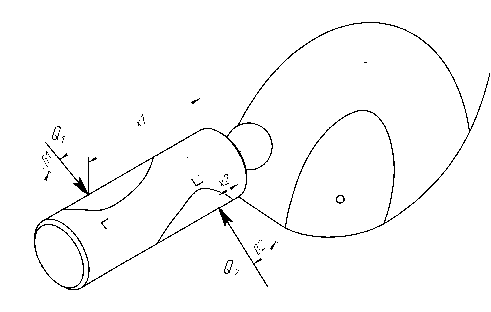
Рис. 3. Представление пространственной распределенной нагрузки
Контакт плунжера и обоймы создает две пространственно распределенных нагрузки q 1 и q 2, которые можно заменить двумя равнодействующими силами Q 1 и Q 2 (рис. 3), проходящими через ось поршня перпендикулярно ей под углами в 1 и А к плоскости xy и приложенными на расстоянии x 1 и x 2 от точки контакта плунжера с наклонной шайбой. В этих точках также возникают силы трения F тр1 и F Tp2, направленные по касательной к поверхности плунжера. Приведем систему сил, действующих на плунжер со стороны обоймы, к главному вектору R и главному моменту M , приложенным в центре масс плунжера.
Запишем уравнения движения поршня в абсолютной системе координат:
mx = - P - Rx + N cos a - Fooo ;
my = R y - F o ;
mz = Rz + N sin a - Fooz ;
Jxv x = M x ;
Jy фy = - Pr cos( ^ ) + Rxr cos( ^ ) - Rzxc - N cos a • r cos( ^ ) + + N sin a • xN - Fdd3 r cos( ^ ) - Fdd z • xN + M y ;
J z& z = - Prsin( ^ ) + Rxr sin( ^ ) + Ryxc + N cos a- r sin( ^ ) - - Fodo r sin( T ) + Foy • x N + Mz .
где Rx, Ry, Rz, Mx, My, Mz - соответствующие проекции главного вектора и главного момента на координатные оси, ф - угол поворота обоймы, xc, xN - координаты центра масс плунжера и точки контакта с наклонной шайбой, P - сила, создаваемая давлением жидкости, Fddx , Fddy , Fddz - соответствующие проекции силы трения на оси координат, которые выражаются следующим образом:
fN cos( F o6 ; x ) sign (;&),| x | > 0;
F oox
= p x + i fN cos( F od ; x ) sign ( £ F x X x = 0, £ F x | > fN cos( F o6 ; x );
£ F x , x = 0, £ F x | < fN cos( F o6 ; x X
fN cos( F oo ; y ) sign ( y XI y | > 0;
F ooy
= p y + \ fN cos(F 66 ; y ) sign ( £ F y X y = 0, £ F y I > fN cos( F 66 ; y );
£ F y , y = 0, £ F y I < fN cos( F 6 6 ; y X
fN cos( F oo ; z ) sign ( j&), | z\ > 0;
F o6z = p z + <
fN cos( F oa ; z ) sign ( £ F z X z = 0, £ F z I > fN cos( F oa ; z );
_ £ F z , z = 0, £ F z I < fN cos( F oa ; z x
где J - коэффициент сухого трения.
В представленных выражениях составляющие M x , R y , M z описывают вязкое трение, пропорциональное скорости движения плунжера относительно неподвижной шайбы, в проекциях на координатные оси. Второе слагаемое описывает силу сухого кулоновского трения. Для определения углов между вектором силы трения и осями координат учтем, что линия действия этой силы совпадает со скоростью плунжера в точке контакта, а, следовательно, соответствующие углы могут быть определены следующим образом:
& cos(Foo ,x) = , 2 x2 2 ;
y )C + y + z
cos( F oo , у ) =
cos( Foo , x ) =
у
2 -2 -2 ;
x + y + z
z
7 x & 2 + y 2 + z 2
Так как в уравнениях движения присутствует угол поворота обоймы, запишем уравнение вращения обоймы при условии, что на нее действует сила только со стороны одного плунжера:
J
y = r sin( ф );
y = r еos( ф ) • ф ;
y = r ( - sin( ф ) • ф 2 + cos ^ ) • ф );
z = r еos( ф );
z = - r sin( ф ) • ф ;
z = - r (еos( ф ) • ф 2 + sin( ф ) • ф ).
При условии безотрывного движения плунжера по поверхности шайбы координата x также может быть выражена через угол φ следующим образом:
z = ax + b = x • tg (90 + а ) + x 0;
x = x 0 tg( а ) - z • tg( а );
.x = r • tg ( а ) • sin( ф ) • ф ;
x = r • tg( а ) • (еод( ф ) • ф 2 + sin( ф ) • ф ).
Выводы: уравнения (1) и (4) с учетом выражений (2), (5) и (6) описывают работу аксиально-поршневой группы гидронасоса. Исследуя поведение системы при различных параметрах, в частности, при различных соотношениях составляющих вязкого и сухого трения между подпятником плунжера и наклонной шайбой и между плунжером и обоймой, можно выявить диагностические признаки, позволяющие определять дефекты методами неразрушающего контроля, такими как измерение вибрации корпуса, давления рабочей жидкости в магистралях и т. д.
Список литературы Составление математической модели аксиально-поршневого гидромотора
- Комисарик, С.Ф. Гидравлические объемные трансмиссии. М.: МАШГИЗ, 1963. -155 с
- Ширман, А.Р. Практическая вибродиагностика и мониторинг состояния механического оборудования. М.: 1996. -276 с.
- Башта, Т.М. Гидравлика, гидромашины и гидроприводы: Учебник для машиностроительных вузов. -М.: Машиностроение, 1982. -423 с.
- Никитин, Н.Н. Курс теоретической механики. -М.: Высшая школа, 2003. -720 с.
