Состояние и перспективы развития фотоэлектрических станций с системами слежения за солнцем

Автор: Митрофанов С.В., Байкасенов Д.К.
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электроэнергетика
Статья в выпуске: 3 т.23, 2023 года.
Бесплатный доступ
Преобразование солнечной энергии в электрическую является одним из решений для повышения надежности электроснабжения удаленных потребителей. Объем генерируемой электроэнергии фотоэлектрическими станциями зависит от их географического месторасположения, температуры окружающей среды, погодных условий, материала фотоэлектрических модулей, а также от угла падения солнечного потока и ориентации фотоэлектрических модулей. В статье рассмотрены способы повышения надежности электроснабжения потребителей электроэнергии фотоэлектрических станций, проанализированы существующие принципы и механизмы, определяющие оптимальное положение фотоэлектрических модулей. Обосновано, что наилучшим способом повышения энергоэффективности работы фотоэлектрических станций является применение автоматизированных систем слежения за Солнцем. Проанализирована научно-техническая литература по проектированию, эксплуатации и моделированию следящих систем фотоэлектрических станций с активным управлением. Рассмотрены существующие классификации систем слежения за Солнцем. Определены основные направления совершенствования и развития следящих систем для фотоэлектрических станций, которые позволят исследователям решать актуальные задачи возобновляемой энергетики.
Солнечные трекеры, системы слежения за солнцем, фотоэлектрические станции, возобновляемые источники энергии, обзор солнечных трекеров
Короткий адрес: https://sciup.org/147241850
IDR: 147241850 | УДК: 621.311.243 | DOI: 10.14529/power230302
The status and prospects for developing photovoltaic power stations with sun tracking systems
The conversion of solar energy into electrical energy can improve the reliability of power supply to remote consumers. The amount of electricity generated by photovoltaic power stations depends on their geographical location, ambient temperature, weather conditions, the material of photovoltaic modules, the angle of incidence of the solar flux, and the orientation of photovoltaic modules. This article discusses ways to improve the reliability of power supply to consumers using photovoltaic power stations and analyzes the principles and mechanisms that determine the optimal position of photovoltaic modules. It is shown that the best way to increase the energy efficiency of photovoltaic power plants is the use of automated solar tracking systems. The scientific and technical literature on the design, operation, and modeling of tracking systems with active control of photovoltaic power stations is analyzed. The existing classifications of solar tracking systems are considered. The main directions for the improvement and development of tracking systems for photovoltaic plants are determined, which will allow researchers to improve the generation of renewable energy.
Текст научной статьи Состояние и перспективы развития фотоэлектрических станций с системами слежения за солнцем
В м ире е ж е годно в оз ра с та е т дол я э л е к тр оэ н ерги и, с ген ер и ров ан н ой в оз обнов ляе м ыми и сточниками энергии (ВИЭ ) . На ибол е е ш ирокое р а с прос тра не ние полу чи ли ВИЭ , ра бота ющие на о с н ов е эне рги и С олн ца и в етра . Н а рис . 1 и 2 предста в л ена ди на м и ка рос та уста новл е н ной м ощности ф о т о э ле кт р и ч е ских с т а н ций ( Ф ЭС) за п о с ле д нее д есяти л ети е в м и р е [ 1 ] и Ро ссий ск ой Ф е д ер аци и [2] с о от в етс тв енн о. Пол ожител ьная те н де н ц ия об усл ов л ена обще дос т у п нос т ью эне ргии С о л н ца , сн ижен и ем с тоим ос ти у с тана вл ив а е м ого обору д ов ан и я д л я ВИЭ , с тре м л е н и е м с тра н к э не ргоне з ав исим ости от угл е в одород н ого сырья, див е рс иф икац ии и де ка рбо низ аци и энерге тик и.
При эксплуатации ФЭС обладают рядом недостатков. Основной недостаток – это их зависимость от погодных условий. Являясь стохастическим источником электроснабжения, они не могут обеспечить бесперебойную работу потребителей электроэнергии ввиду смены дня и ночи и погодных условий (облачности). Для повышения надежности электроснабжения ФЭС укомплектовываются аккумуляторными батареями, а также работают в составе гибридных энергетических комплексов (например, ветро-солнечная станция с дизель-генератором и аккумуляторными батареями [3], солнечно-водородная станция [4] и др.). Еще один недостаток – это низкий коэффициент полезного действия фотоэлектрических преобразователей [5, 6]. Работы по повышению КПД ФЭС проводятся ведущими мировыми учеными и производителями оборудования. Рассмотрение этого вопроса требует отдельного исследования.
Для повышения энергоэффективности ФЭС применяют следующие способы:
– регулируют угол наклона фотоэлектрических модулей ФЭМ в зависимости от времени года, что
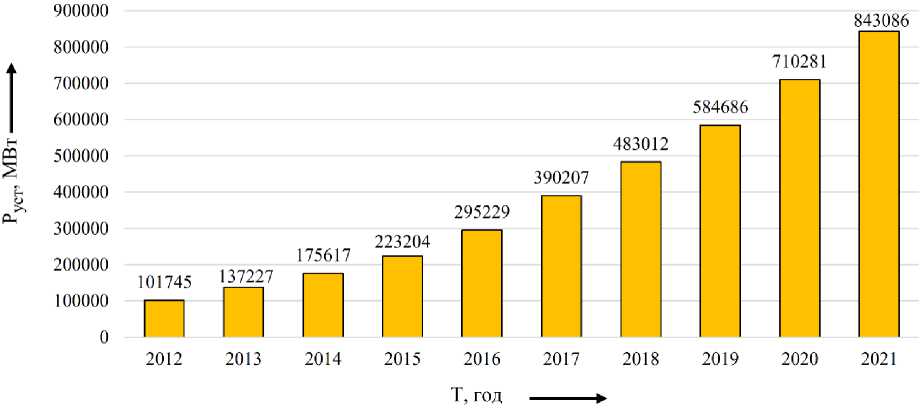
Рис. 1. Установленная мощность фотоэлектрических станций в мире Fig. 1. Installed capacity of photovoltaic plants in the world

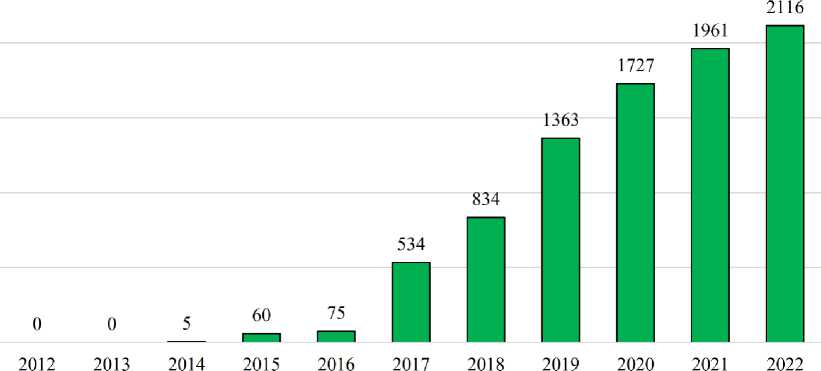
Т, год -------►
Рис. 2. Установленная мощность фотоэлектрических станций в Российской Федерации Fig. 2. Installed capacity of photovoltaic plants in Russia
обеспечивает прирост генерации на 9,7 % ежегодно, 12,74 % ежемесячно, 24,78 % ежечасно относительно горизонтально установленных ФЭМ [7]. Приведены данные исследований, проведенных в Канаде, которая географически расположена примерно на одних и тех же широтах, что и Российская Федерация;
– применяют двухсторонние ФЭМ, которые в среднем во всем мире способствуют повышению генерации электроэнергии на величину от 10 % (при альбедо 0,25 – типично для естественного почвенного покрова) до 20 % (при увеличении альбедо грунта до 0,5) в сравнении со стационарными односторонними ФЭМ [8];
– внедряют автоматизированные системы слежения за Солнцем (далее – системы слежения, следящие системы, солнечные трекеры), которые позволяют увеличить выработку электроэнергии при двухкоординатном ежечасном регулировании до 40 % относительно стационарных ФЭМ [9].
Исходя из вышеуказанного, наилучший способ повышения энергоэффективности работы ФЭС – применение автоматизированных систем, следящих за Солнцем. Системы слежения наводят ФЭМ на Солнце, обеспечивая максимальный сбор солнечного потока и, как следствие, повышение объема генерации электроэнергии по сравнению со стационарно установленными ФЭМ.
Целью данной статьи является оценка текущего состояния развития систем слежения за Солнцем.
Задачи, которые необходимо решить для достижения поставленной цели:
-
– анализ классификаций систем слежения за Солнцем;
-
– обзор существующих следящих систем c активным управлением;
-
– определение перспектив развития солнечных трекеров.
Анализ классификаций системслежения за Солнцем
Анализ научно-технической литературы позволил выявить следующие подходы к классификации следящих систем [10–16], которые представлены на рис. 3 и 4.
Классификация, представленная в ГОСТ Р 57229–2016 [10], на данный момент является наиболее полной. Далее следует подробнее остановиться на основных признаках классификации.
В зависимости от количества степеней свободы все системы слежения подразделяются на одно-и двухосевые, которые также классифицируют на системы с горизонтальной, вертикальной и наклонной осями вращения.
Системы слежения за Солнцем оснащаются электро-, гидро- и пассивными приводами. Перемещение вокруг оси вращения ФЭМ электроприводами осуществляется за счет электрической энергии двигателей постоянного или переменного тока. В гидроприводах кинетическая энергия жидкости, поступающая от насоса, преобразуется в механическую энергию гидромотора, что приводит к вращению ФЭМ. В системах слежения с пассивным приводом вращение ФЭМ вокруг оси осуществляется за счет разности давлений рабочей жидкости. Исследованию приводов для систем слежения за Солнцем посвящены работы В.М. Овсянникова [17, 18], В.Б. Пшеннова [19], В.М. Терехова [20], Г.Ю. Сорокина [21], Д.А. Турдзеладзе [22], Э.М. Аббасова и Т.С. Аббасовой [23], К.В. Аржанова [24], А.Ю. Сологубова [25] и др.
Системы слежения за Солнцем могут быть с пассивным, превентивным и активным управлением.
При пассивном управлении вращение ФЭМ осуществляется за счет внутренних сил, возникших в результате изменения плотности жидкости под влиянием внешней среды (изменение температуры).
Превентивное управление применяется для исключения взаимного затенения близко размещенных ФЭС с системой слежения за Солнцем. Способ управления актуален для ФЭС с многорядной установкой ФЭМ. Например, утром и вечером ФЭМ через ряд принимают горизонтальное положение для исключения затенения.
Активное управление обеспечивает поворот ФЭМ вокруг оси с помощью приводов под действием внешней энергии. В свою очередь, данный тип управления классифицируют:
-
- на управление с разомкнутым контуром (без обратной связи по ошибке наведения ФЭМ на Солнце), например, системы слежения за Солнцем, функционирующие по математическим алгоритмам. Микроконтроллер или компьютер на основе известного алгоритма в зависимости от времени, географического местоположения ФЭС определяет углы наклона ФЭМ и передает команду управления на электродвигатель с целью перемещения ФЭМ перпендикулярно лучам Солнца. К данному типу управления также относятся системы, требующие ручного наведения ФЭМ на Солнце (сезонное, суточное и т. д.);
-
- управление с замкнутым контуром (управление с обратной связью с применением фоторезисторов, камер и т. д.). Принцип действия системы с фоторезисторами аналогичен для одно- и двухосевых систем – например, при одноосевой системе слежения микроконтроллер анализирует показания пары фоторезисторов и подает команду на поворот платформы с ФЭМ таким образом, чтобы уравновесить значения токов, получаемых от фоторезисторов. Считается, что при равенстве токов, протекающих в цепях фоторезисторов, ФЭМ расположен перпендикулярно лучам Солнца;
-
- смешанное (гибридное) управление, подразумевающее совместное использование двух
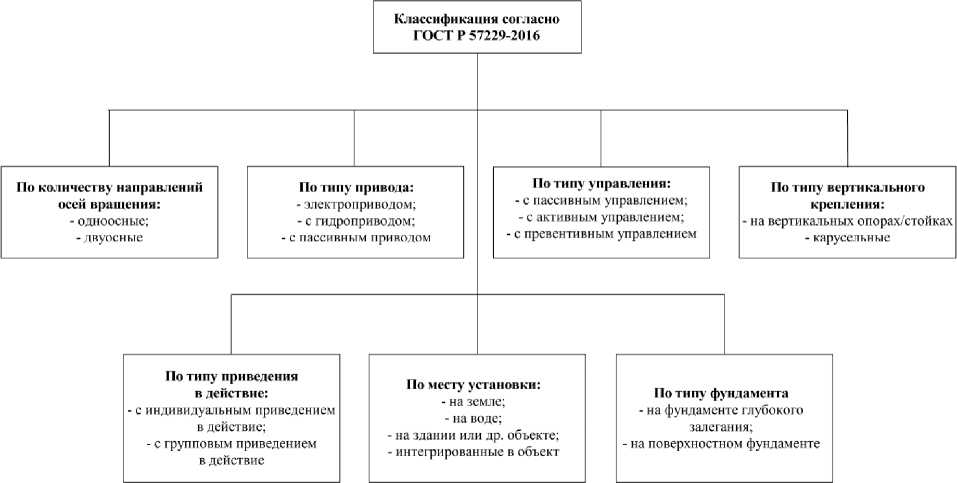
Рис. 3. Классификация следящих систем по ГОСТ Р 57229–2016
Fig. 3. Classification of tracking systems according to GOST R 57229–2016
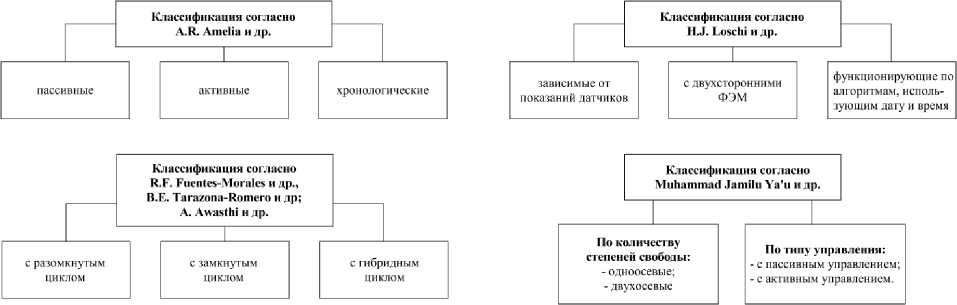
Рис. 4. Классификации следящих систем, разработанных исследователями Fig. 4. Classification of tracking systems developed by researchers
вышеуказанных принципов. Например, интеллектуальные системы, самостоятельно принимающие решение о выборе принципа управления или с помощью отслеживания положения Солнца на основе данных, полученных от внешних датчиков или по математическим алгоритмам.
Обзор существующих следящих систем с активным управлением
В большинстве случаев ФЭС с системой слежения представляют собой группу ФЭМ, установленных на поворотной раме, имеющей одну или две степени свободы. Рама, в свою очередь, закреплена на опоре (стойке, мачте). При этом эффективное наведение ФЭМ на Солнце возможно реализовать всеми вышеперечисленными принципами управления – по математическим алгоритмам, по показаниям датчиков внешних условий, по гибридному принципу, ручным наведением ФЭМ на Солнце.
Следящие системы с разомкнутым контуром управления
Встречаются ФЭС с двухосевой системой слежения с самораскрытием. Пример моделирования такой системы выполнен в среде MATLAB Simulink и представлен в работе [26]. В основе работы следящей системы заложен алгоритм расчета азимута и высоты Солнца. Установка имеет защиту от воздействия неблагоприятных условий окружающей среды. Исследователи планируют разработку систем слежения для действующих промышленных ФЭС, для частных ФЭС и ФЭС для путешествий и туризма.
В работе [27] выполнен анализ эффективности работы стационарной ФЭС, ФЭС с двухосевым трекером на базе фоторезисторов и ФЭС с системой слежения, основанной на математических алгоритмах. Выявлено, что последняя превосходит по эффективности стационарную ФЭС и систему слежения с фоторезисторами на 13,9 и 2,1 % соответственно.
В работе [28] сконструирован двухосевой солнечный трекер, работающий по алгоритму, который моделирует траекторию движения Солнца с помощью временных уравнений. Система слежения позволяет повысить генерацию электроэнергии на 33 % в сравнении с ФЭС с неподвижными ФЭМ. Кроме того, в статье приведена методика механического расчета электропривода следящей системы.
Моделирование работы ФЭС в 12 городах мира с одно- и двухосевыми автоматизированными системами слежения за Солнцем (алгоритм работы системы слежения на основе математических алгоритмов), а также с системой слежения, требующей наведение ФЭМ на Солнце в ручном режиме ежемесячно и ежесезонно, выполнено в работе [9]. Согласно результатам моделирования, объем сгенерированной электроэнергии ФЭС с одноосевой следящей системой близок к ФЭС с двухосевой системой слежения для большинства городов, особенно тех, которые расположены на широте 40° и выше. Авторы считают, что ФЭС с одноосевым солнечным трекером предпочтительнее благодаря более экономичному техническому обслуживанию и облегченной конструкции в сравнении с ФЭС с двухосевой системой слежения за Солнцем. Результаты моделирования также подтвердили, что ежемесячное регулирование угла наклона ФЭМ обеспечивает больший прирост выработки электроэнергии, чем сезонное регулирование угла наклона ФЭМ. Ежемесячное регулирование угла наклона ФЭМ вручную позволяет в среднем на 8 % увеличить генерацию электроэнергии в зависимости от широты местоположения, а также местных климатических условий каждого города. Как правило, системы слежения, требующие ручной регулировки угла наклона ФЭМ, намного дешевле, конструктивно проще, надежнее и имеют более длительный срок службы, чем автоматизированные. Таким образом, ФЭС с ежемесячным ручным регулированием угла наклона можно рассматривать как альтернативное решение между ФЭС с дорогостоящей автоматизированной системой слежения и ФЭС со стационарными ФЭМ.
В работе [29] проанализирован потенциал шести типов ФЭС в Китае, США, Японии, Германии, Индии, Италии, Великобритании, Австралии, Франции, Южной Корее: со стационарными односторонними ФЭМ, с одно- и двухосевыми односторонними ФЭМ, а также со стационарными двухсторонними ФЭМ и с одно- и двухосевыми двухсторонними ФЭМ. В представленной модели системы слежения за Солнцем функционируют по математическим алгоритмам. Согласно исследованию, в сравнении с односторонними стационарными ФЭМ, средний прирост генерации составил: 40 % (двухосевые системы с двухсторонними ФЭМ), 31 % (двухосевые системы с односторонними ФЭМ), 35 % (одноосевые системы с двух- сторонними ФЭМ), 26 % (одноосевые системы с односторонними ФЭМ), 7 % (стационарные двухсторонние ФЭМ). Также определена расчётная себестоимость производства электроэнергии на протяжении всего жизненного цикла электростанции (LCOE) относительно ФЭС со стационарными односторонними ФЭМ: одноосевые следящие системы с двухсторонними ФЭМ (на 16 % ниже), одноосевые следящие системы с односторонними ФЭМ (на 14 % ниже), стационарные двухсторонние ФЭМ (на 3 % ниже). В то же время двухосевые трекеры с односторонними и двухсторонними ФЭМ приводят к увеличению LCOE на 8 и 4 % соответственно относительно стационарных односторонних ФЭМ. По мнению авторов, применение одноосевых следящих систем является наиболее эффективным и предпочтительным.
Статья [30] связана с моделированием действующей ФЭС мощностью 420 кВт, состоящей из 16 фотоэлектрических цепей по 26 кВт каждая. В составе ФЭС имеются стационарные и двухсторонние ФЭМ с одноосевой системой слежения за Солнцем, которая базируется на математических алгоритмах. Применение двухсторонних ФЭМ с фиксированным углом наклона привело к повышению генерации электроэнергии на 4,5–7 %. При этом внедрение двухсторонних ФЭМ на ФЭУ с одноосевой системой слежения с вертикальной осью вращения обеспечило повышение выработки электроэнергии на 6,3–8,5 %. Исследователи полагают, что это связано с более широким расстоянием (12 м) между рядами для фотоэлектрических цепей со следящей системой по сравнению с более узким расстоянием 7,6 м у стационарных фотоэлектрических систем, что создает большее само-затенение во внутренних рядах фотоэлектрического парка.
Исследование [31] посвящено технико-экономическому обоснованию применения систем слежения за Солнцем с двухсторонними ФЭМ. Согласно полученным результатам, для широты местности менее 50° для повышения генерации электроэнергии ФЭС необходимо применять двухсторонние одноосевые системы слежения за Солнцем с вертикальной осью вращения (вращение ФЭМ по азимуту с востока на запад), для широты местности более 50° эффективнее применение двухсторонних одноосевых систем с горизонтальной осью вращения (изменение угла наклона ФЭМ в диапазоне от 0 до 90° по зенитальной оси).
Описание коммерческой ФЭС с ФЭМ, сконструированными и установленными в виде лепестков цветка [32], приведено в статье [33]. Система слежения определяет по GPS местоположение, аналогично гелиотропизму с восходом Солнца «лепестки» ФЭС раскрываются и «цветок» отслеживает положение Солнца по двум осям по математическим алгоритмам в течение дня, после захода Солнца или при сильном порывистом ветре
«лепестки» сворачиваются. В статье также представлены результаты моделирования ФЭС в среде SolidWorks, которые подтвердили механическую прочность установки.
Производство ФЭС с системами слежения за Солнцем осуществляется также компаниями ЮСТ (ООО «Энергосистемы») [34], ООО «АЛЬЭН» [35], SAT Control [36] и др. Однако в свободном доступе отсутствует информация об опыте эксплуатации коммерческих и промышленных ФЭС с системами слежения за Солнцем.
Системы слежения за Солнцем с разомкнутым контуром управления также представлены в работах [37–44].
Следящие системы с замкнутым контуром управления
Исследователи [45] разработали двухосевую систему слежения на основе датчиков ультрафиолетового (УФ) излучения. Анализируя значения датчиков, микроконтроллер Arduino Mega подает команды управления на линейные актуаторы. Экспериментальные результаты показывают, что система слежения с датчиками УФ-излучения увеличивает выработку энергии на 19,97 % по сравнению со стационарными ФЭМ и на 11 % – относительно двухосевой следящей системы с фоторезисторами.
Разработка иранских исследователей [46] основана на анализе изображения тени, проецируемой на камеру. Над ФЭМ установлен экран с закрепленным перпендикулярно объектом (штырем), который проецирует тень на экран. Экран расположен в одной плоскости с ФЭМ. За экраном закреплена камера, определяющая размер тени. Когда Солнце находится точно над объектом (солнечный поток перпендикулярен плоскости ФЭМ), на экран тень не проецируется. Если тень от объекта на экране проецируется справа, Солнце находится слева от объекта. Угол тени по отношению к солнечному потоку тесно связан с двумя солнечными углами: солнечным азимутальным углом и солнечным зенитным углом. Измеряя следующие два параметра по тени объекта, можно определить положение объекта относительно Солнца: отношение длины тени объекта к высоте объекта и угол наклона тени, отбрасываемой на экран относительно севера. При равенстве нулю двух вышеуказанных параметров для тени вертикального объекта, отбрасываемой на экран, ФЭМ перпендикулярен солнечному потоку.
Исследователи из Марокко [47] разработали двухосевой солнечный трекер и программноаппаратный комплекс в среде Microsoft Excel для мониторинга параметров ФЭС. Микроконтроллер Arduino Uno анализирует данные с четырех фоторезисторов и подает команды управления на сервопривод. Система управления позволяет повысить эффективность работы ФЭС на 35,16 % относительно стационарных ФЭС.
В университете Йоханнесбурга [48] разработана интеллектуальная одноосная следящая система с фоторезисторами, работающая с использованием аппарата нечеткой логики. Применение солнечного трекера позволило повысить эффективность работы ФЭС на 25 % относительно стационарной ФЭС.
В Канаде [49] разработана двухосевая следящая система для портативной мини-ФЭС со складными ФЭМ в виде оригами. С целью защиты мини-ФЭС от механических повреждений последняя размещена в транспортировочном разборном ящике, в котором ФЭМ, соединенные петлями, складываются по схеме Миура-ори (указанная схема применялась для ФЭМ на космических спутниках). Система слежения за Солнцем базируется на анализе показаний с четырех фотодатчиков, поворот ФЭМ осуществляется шаговыми двигателями.
Исследования в области систем слежения за Солнцем с замкнутым контуром управления также приведены в [50–57].
Смешанные (гибридные) следящие системы
Работа [58] связана с разработкой гибридной автоматизированной следящей системы, использующей фоторезисторы для наведения на Солнце и систему GPS/BeiDou для определения географического местоположения ФЭС. Алгоритм расчета положения Солнца необходим для калибровки фоторезисторов в переменную облачность. Расчеты часового угла, угла склонения, угла высоты и азимутального угла выполняются в пределах допустимой точности. Разница с результатами калькулятора SOLPOS [59] составила менее 1°.
Исследователи из Пекинского технологического института в своей работе [60] представили следящую систему для ФЭС, работающую в гибридном режиме. В режиме грубого отслеживания микронтроллер STM32, используя данные о географическом местоположении ФЭС и местном времени от GPS-модуля, определяет положение Солнца по алгоритму отслеживания траектории движения Солнца. После завершения грубого отслеживания система оценивает необходимость активации уточненного режима, а именно режима отслеживания положения Солнца с помощью фотодатчика. Если интенсивность солнечного потока превышает пороговое значение, система отслеживает положение Солнца по уточненному режиму. Авторы утверждают, что при работе системы слежения только по алгоритму отслеживания траектории движения Солнца возникает ошибка отслеживания, которая накапливается во время работы системы. Для компенсации указанной ошибки в систему добавлен фотоэлектрический датчик (четырехквадрантный фотоприемник). Система имеет высокую точность отслеживания положения Солнца (0,15°).
C целью повышения энергоэффективности зданий в университете Ёнсе [61] разработана гибридная система слежения за Солнцем для интеллектуальных фотоэлектрических жалюзи. Рассмотрены прямой и косвенный методы определения максимальной выработки электроэнергии такими жалюзи. Разработанная система определяет оптимальный метод отслеживания положения Солнца по критерию наибольшей генерации электроэнергии. При прямом методе по значению тока и напряжения фотоэлектрических жалюзи рассчитывается объем генерируемой электроэнергии для всех возможных комбинаций углов наклона жалюзи, а именно – по горизонтали от –6 до +6°; по вертикали от 0 до 60°. На основе проведенных расчетов система автоматически определяет для данного метода угол наклона жалюзи, при котором обеспечивается максимальная генерация электроэнергии. Принцип работы косвенного метода состоит в определении азимута и высоты Солнца и станций с системами слежения за Солнцем оптимального угла наклона фотоэлектрических жалюзи по известным дате, времени и географическому местоположению ФЭМ. Расчет выполняется разными методами, среди которых выбирается один, обеспечивающий максимальную генерацию электроэнергии. Экспериментально установлено, что с помощью гибридного метода слежения за Солнцем сгенерировано на 8,5 % больше электроэнергии, чем при прямом методе слежения, и в среднем на 47,8 % выше, чем при косвенном методе слежения за Солнцем.
Гибридным системам слежения также посвящены работы [62–64].
Результаты анализа научно-технической литературы по следящим системам сведены в таблицу. За основу таблицы приняты классификационные признаки по ГОСТ Р 57229–2016 [10]. Также добавлены дополнительные сравнительные признаки – тип модели (физическая, математическая, имитационная) и мощность ФЭУ.
Таблица
Исследователи, разработавшие активные системы слежения за Солнцем фотоэлектрических станций
Table
Research developing active solar tracking systems for photovoltaic power plants
|
№ |
Разработчик |
Кол-во осей |
Тип привода |
Тип вертикального крепления |
Тип приведения в действие |
Место установки |
Тип модели |
Принцип управления |
Мощность ФЭУ, кВт |
|
1 |
Nageh M. и др. [9] |
1, 2 |
Электр. |
– |
– |
– |
Имитац. |
Разомк. (мат. алгоритмы) |
– |
|
2 |
Рявкин Г.Н. и др. [26] |
2 |
– |
– |
– |
– |
Матем. |
Разомк. (мат. алгоритмы) |
– |
|
3 |
Chowdhury M.E.H. и др. [27] |
2 |
Электр. (сервопривод) |
Карусельное |
Индивид. |
Лаборато-рия/поме-щение |
Физич. |
Замкн. (фотодатчик) |
0,001 |
|
Разомк. (мат. алгоритмы) |
0,001 |
||||||||
|
4 |
Mohamed Redha Rezoug R.C. и др. [28] |
2 |
Электр. (лин. актуаторы) |
Верт. стойка |
Индивид. |
На крыше |
Физич. |
Разомк. (мат. алгоритмы) |
0,1 |
|
5 |
Rodríguez-Gallegos C.D. и др. [29] |
1, 2 |
– |
– |
– |
– |
Матем. |
Разомк. (мат. алгоритмы) |
– |
|
6 |
Riedel-Lyngskæ N. и др. [30] |
1 |
– |
– |
– |
– |
Матем. |
Разомк. (мат. алгоритмы) |
– |
|
7 |
Patel M.T. и др. [31] |
1 |
– |
– |
– |
– |
Матем. |
Разомк. (мат. алгоритмы) |
– |
|
8 |
Компания SmartFlower [32] |
2 |
Электр. |
Верт. стойка |
Индивид. |
Вариативно |
Физич. |
Разомк. (мат. алгоритмы) |
2,5 |
|
9 |
Компания ЮСТ ( ООО «Энергосистемы»), UST-AADAT [34] |
2 |
Электр. (опорно-поворотное устройство) |
Верт. стойка |
Индивид. |
Вариативно |
Физич. |
Разомк. (мат. алгоритмы) |
До 24,48 |
|
10 |
Компания ООО «АЛЬЭН», АD-5000 [35] |
2 |
Электр. |
Верт. стойка |
Индивид. |
Вариативно |
Физич. |
Разомк. (мат. алгоритмы) |
До 10,8 |
|
11 |
Компания SAT Control, двухосевой трекер [36] |
2 |
Электр. (лин. актуаторы) |
Верт. стойка |
Индивид. |
Вариативно |
Физич. |
Разомк. (мат. алгоритмы) |
Для ФЭМ площадью до 25м2 |
Продолжение таблицы Table (continued)
|
№ |
Разработчик |
Кол-во осей |
Тип привода |
Тип вертикального крепления |
Тип приведения в действие |
Место установки |
Тип модели |
Принцип управления |
Мощность ФЭУ, кВт |
|
12 |
Kuttybay N. [37] |
1 |
Электр. (мотор-редуктор) |
Верт. стойка |
Индивид. |
На земле |
Физич. |
Разомк. (мат. алгоритмы) |
0,06 |
|
Замкн. (фотодатчик) |
0,06 |
||||||||
|
13 |
Обухов С.Г. и др. [38] |
1, 2 |
Электр. |
– |
– |
– |
Имитац. |
Разомк. (мат. алгоритмы) |
– |
|
14 |
Ikhwan M. и др. [39] |
2 |
– |
– |
– |
– |
Матем. |
Разомк. (мат. алгоритмы) |
– |
|
15 |
Wong J. [40] |
1 наклон. |
– |
– |
– |
– |
Матем. |
Разомк. (мат. алгоритмы) |
– |
|
16 |
Бирюлин В.И. и др. [41] |
– |
– |
– |
– |
– |
Матем. |
Разомк. (мат. алгоритмы) |
– |
|
17 |
Егоров В.А. и др. [42] |
– |
– |
– |
– |
– |
Матем. |
Разомк. (мат. алгоритмы) |
– |
|
18 |
Манусов В.З. и др. [43] |
2 |
Электр. |
Верт. стойка |
Индивид. |
Нет данных |
Физич. |
Разомк. (мат. алгоритмы) |
0,3 |
|
19 |
Горелова А.Ю. и др. [44] |
1 |
Электр. (шаговый) |
Верт. стойка |
Индивид. |
Лаборато-рия/поме-щение |
Физич. |
Разомк. (мат. алгоритмы) |
0,002 |
|
20 |
Jamroen C. и др. [45] |
2 |
Электр. (лин. актуаторы) |
Верт. стойка |
Индивид. |
На земле |
Физич. |
Замкн. (УФ-датчик) |
0,08 |
|
21 |
Abdollahpour M. и др. [46] |
2 |
Электр. (шаговый) |
Верт. стойка |
Индивид. |
Лаборато-рия/поме-щение |
Физич. |
Замк. (камера) |
Нет данных |
|
22 |
Motahhir S. и др. [47] |
2 |
Электр. (сервопривод) |
Карусельное |
Индивид. |
Лаборато-рия/поме-щение |
Физич. |
Замкн. (фотодатчик) |
0,002 |
|
23 |
Munanga P. и др. [48] |
1 |
Электр. (шаговый) |
Верт. стойка |
Индивид. |
На земле |
Физич. |
Замкн. (фотодатчик) |
0,002 |
|
24 |
Jasim B. и др. [49] |
2 |
Электр. (шаговый) |
Верт. стойка |
Индивид. |
Лаборато-рия/поме-щение |
Физич. |
Замкн. (фотодатчик) |
Нет данных |
|
25 |
Haider M.R. и др. [50] |
2 |
Электр. (сервопривод) |
Верт. стойка |
Индивид. |
Лаборато-рия/поме-щение |
Физич. |
Замкн. (фотодатчик) |
Нет данных |
|
26 |
Аржанов К.В. [51] |
2 |
Электр. (шаговый) |
Карусельное |
Индивид. |
На крыше |
Физич. |
Замкн. (фотодатчик) |
0,5 |
|
27 |
Китаева М.В. и др. [52] |
1 |
Электр. (шаговый) |
Верт. стойка |
Индивид. |
Нет данных |
Физич. |
Замкн. (фотодатчик) |
0,05 |
|
28 |
Митрофанов С.В. и др. [53] |
2 |
Электр. (лин. актуаторы) |
Верт. стойка |
Индивид. |
На крыше |
Физич. |
Замкн. (фотодатчик) |
0,4 |
|
29 |
Abhilash P. и др. [54] |
1 |
Электр. (шаговый) |
Верт. стойка |
Индивид. |
Лаборато-рия/поме-щение |
Физич. |
Замкн. (фотодатчик) |
0,01 |
|
30 |
Залесский В.С. и др. [55] |
2 |
Электр. |
Верт. стойка |
Индивид. |
Нет данных |
Физич. |
Замкн. (фотодатчик) |
Нет данных |
|
31 |
Ильин В.Ю. и др. [56] |
2 |
Электр. (сервопривод) |
– |
– |
– |
Имитац. |
Замкн. (фотодатчик) |
– |
|
32 |
Марков А.М. и др. [57] |
1 |
Электр. (сервопривод) |
Верт. стойка |
Индивид. |
Лаборато-рия/поме-щение |
Физич. |
Замкн. (фотодатчик) |
0,001 |
|
33 |
Zhang J. и др. [58] |
2 |
Электр. (шаговый) |
Верт. стойка |
Индивид. |
Нет данных |
Физич. |
Гибрид. (фотодатчики + мат. алгоритмы) |
Нет данных |
Окончание таблицы Table (end)
|
№ |
Разработчик |
Кол-во осей |
Тип привода |
Тип вертикального крепления |
Тип приведения в действие |
Место установки |
Тип модели |
Принцип управления |
Мощность ФЭУ, кВт |
|
34 |
Mao K. и др. [60] |
2 |
Электр. (шаговый) |
Нет данных |
Индивид. |
Нет данных |
Физич. |
Гибрид. (фотодатчики + мат. алгоритмы) |
Нет данных |
|
35 |
Kang H. и др. [61] |
1 |
Электр. |
Нет данных |
Индивид. |
Лаборато-рия/поме-щение |
Физич. |
Гибрид. (по значению тока и напряжения + мат. алгоритмы) |
Нет данных |
|
36 |
Guilherme Toginho D. [62] |
2 |
Электр. (сервопривод) |
Нет данных |
Индивид. |
Передвижная |
Физич. |
Гибрид. (фотодатчики + мат. алгоритмы) |
Нет данных |
|
37 |
Safan Y.M. и др. [63] |
2 |
Электр. (шаговый) |
Верт. стойка |
Индивид. |
Нет данных |
Физич., имитац. |
Гибрид. (фотодатчики + мат. алгоритмы) |
Нет данных |
|
38 |
Bharathi M.I. и др. [64] |
2 |
Электр. (лин. актуаторы) |
Нет данных |
Индивид. |
Нет данных |
Физич. |
Гибрид. (фото- и УФ-датчики + мат. алгоритмы) |
Нет данных |
Список литературы Состояние и перспективы развития фотоэлектрических станций с системами слежения за солнцем
- Renewable Energy Statistics 2022. URL: https://www.irena.org/publications/ 2022/Jul/Renewable-Energy-Statistics-2022 (дата обращения: 20.02.2023).
- Отчет о функционировании ЕЭС России. URL: https://www.so-ups.ru/functioning (дата обращения: 20.02.2023).
- Decomposition based multiobjective evolutionary algorithm for PV/Wind/Diesel Hybrid Microgrid System design considering load uncertainty / H.R.E.-H. Bouchekara, M.S. Javaid, Y.A. Shaaban et al. // Energy Reports. 2021. Vol. 7. P. 52–69. DOI: 10.1016/j.egyr.2020.11.102
- Eriksson E.L.V., Gray E.M. Optimization of renewable hybrid energy systems – A multi-objective approach // Renewable Energy. 2019. Vol. 133. P. 971–999. DOI: 10.1016/j.renene.2018.10.053
- Эффективность солнечных электростанций на примере условий Республики Башкортостан / Р.А. Молчанова, И.В. Новоселов, Э.А. Абдуллина и др. // Энергобезопасность и энергосбережение. 2019. № 4. С. 25–32. DOI: 10.18635/2071-2219-2019-4-25-32
- Кувшинов В.В., Бекиров Э.А., Гусева Е.В. Использование фотоэлектрических модулей с двухсторонней приёмной поверхностью для установок малой генерации // Строительство и техногенная безопасность. 2021. № 20 (72). С. 93–100. DOI: 10.37279/2413-1873-2021-20-93-100
- Formulation and Data-Driven Optimization for Maximizing the Photovoltaic Power with Tilt Angle Adjustment / W. Ye, M.S. Herdem, J.Z. Li. et al. // Energies. 2022. Vol. 15, no. 22. P. 1–20. DOI: 10.3390/en15228578
- Optimization and performance of bifacial solar modules: A global perspective / X. Sun, M.R. Khan, C. Deline et al. // Applied Energy. 2018. Vol. 212. P. 1601–1610. DOI: 10.1016/j.apenergy.2017.12.041
- Nageh M., Abdullah M.P., Yousef B. Energy Gain between Automatic and Manual Solar Tracking Strategies in Large Scale Solar Photovoltaic System – 12 Cities Comparison // 2021 IEEE International Conference in Power Engineering Application (ICPEA). Malaysia: IEEE. 2021. P. 121–126. DOI: 10.1109/ICPEA51500.2021.9417856
- ГОСТ Р 57229–2016 (МЭК 62817:2014). Системы фотоэлектрические. Устройства слежения за Солнцем. Технические условия. Введ. 2017-09-01. М.: Стандартинформ, 2017. 67 с.
- Loschi H., Iano Y., León J. et al. A Review on Photovoltaic Systems: Mechanisms and Methods for Irradiation Tracking and Prediction // Smart Grid Renewable Energy. 2015. Vol. 6. P. 187–208. DOI: 10.4236/sgre.2015.67017
- Fuentes-Morales R.F., Díaz-Ponce A., Peña-Cruz M.I. Control algorithms applied to active solar tracking systems: A review // Solar Energy. 2020. Vol. 212. P. 203–219. DOI: 10.1016/j.solener.2020.10.071
- A Review on Solar Tracking System: A Technique of Solar Power Output Enhancement / J. Ya’u Muhammad, M. Jimoh, I. Baba Kyari et al. // Engineering Science. 2019. Vol. 4, no. 1. P. 1–11. DOI: 10.11648/j.es.20190401.11
- Evaluation of control strategies applied in small-scale photovoltaic solar tracking systems: a review / B.E. Tarazona-Romero, E.J. Plata-Pineda, C.L. Sandoval-Rodriguez et al. // IOP Conference Series Materials Science and Engineering. 2022. Vol. 1253, no. 1. P. 1–17. DOI: 10.1088/1757-899X/1253/1/012017
- Review on sun tracking technology in solar PV system / A. Awasthi, A.K. Shukla, S.R. Murali Manohar et al. // Energy Reports. 2020. Vol. 6. P. 392–405. DOI: 10.1016/j.egyr.2020.02.004
- Technologies of solar tracking systems: A review / A.R. Amelia, Y.M. Irwan, I. Safwati et al. // IOP Conference Series Materials Science and Engineering. IOP Publishing. 2020. Vol. 767, no. 1. P. 1–10. DOI: 10.1088/1757-899X/767/1/012052
- Овсянников Е.М. Особенности следящих электроприводов гелиоустановок // Труды Московского энергетического института. 1979. Т. 400. С. 79–85.
- Овсянников Е.М. Электропривод энергетической гелиоустановки // Привод и управление. 2000. № 2. С. 4–9.
- Овсянников Е.М., Пшеннов В.Б. Повышение основных технико-экономических показателей электроприводов гелиоустановок // Материалы 49-й международной научно-технической конференции ААИ«Приоритеты развития отечественного автотракторостроения и подготовки инженерных кадров» Международного научного симпозиума, посвященного 140-летию МГТУ «МАМИ». Часть 3. 2005. С. 57–58.
- Терехов В.М., Овсянников Е.М., Цаценкин В.К. Малоредукторный следящий электропривод для систем наведения // Труды Московского энергетического института. 2000. Т. 976. С. 46–58.
- Сорокин Г.А. Потери энергии в электроприводе гелиоустановок // Вестник МЭИ. 2004. № 5. С. 45–47.
- Турдзеладзе Д.А. Анализ динамических режимов следящих электроприводов гелиоустановок с учетом нелинейности момента сопротивления // Научные труды Грузинского политехнического института. 1987. № 3 (315). С. 107–110.
- Аббасов Э.М., Аббасова Т.С. Исследование структуры и условий работы следящих электроприводов гелиоустановок // Промышленная энергетика. 2011. № 1. С. 45–49.
- Аржанов К.В., Аржанова А.В. Двухкоординатный следяще-позиционный электропривод для фотоэлектрических установок // Труды XVII Международной конференции «Электромеханика, Электротехнологии, Электротехнические материалы и Компоненты». 2018. С. 195–197.
- Сологубов А.Ю., Кирпичникова И.М. Совокупность решений в области повышения эффективности электротехнических комплексов слежения за солнцем // Наука ЮУрГУ: материалы 72-й научной конференции. Секции технических наук. 2020. С. 391–399.
- Солнечный трекер с системой самораскрытия / Г.Н. Рявкин, Е.В. Соломин, К. Мадемлис и др. // Вестник ЮУрГУ. Серия «Энергетика». 2021. Т. 21, № 1. С. 82–89. DOI: 10.14529/power210109
- A Low-Cost Closed-Loop Solar Tracking System Based on the Sun Position Algorithm / M.E.H. Chowdhury, A. Khandakar, B. Hossain et al. // Journal of Sensors. 2019. Vol. 2019. P. 1–11. DOI: 10.1155/2019/3681031
- Mohamed Redha Rezoug R.C. The Optimal Angles of a Dual-Axis Tracking System by Pre-Programmed Method Using a Microcontroller. Zenodo. 2018. P. 710–726. DOI: 10.5281/zenodo.1207029
- Global Techno-Economic Performance of Bifacial and Tracking Photovoltaic Systems / C.D. Rodríguez-Gallegos, H. Liu, O. Gandhi et al. // Joule. 2020. Vol. 4, no. 7. P. 1514–1541. DOI: 10.1016/j.joule.2020.05.005
- Large-Scale Bifacial PV Test Field Performance Compared to Simulations Using Commercially Available Software, Research-Based and Open Source Tools / N. Riedel-Lyngskær, D. Berrian, D. Alvarez Mira et al. // Proceedings of 37th European Photovoltaic Solar Energy Conference and Exhibition. 2020. P. 1324–1329. DOI: 10.4229/EUPVSEC20202020-5CO.10.4
- Global analysis of next-generation utility-scale PV: Tracking bifacial solar farms / M.T. Patel, M.S. Ahmed, H. Imran et al. // Applied Energy. 2021. Vol. 290. P. 1–11. DOI: 10.1016/j.apenergy.2021.116478
- The Solar Flower You Need to Experience. URL: https://smartflower.com (дата обращения: 20.02.2023).
- Design and Analysis of Solar Smartflower Simulation by Solidwork Program / T. Mulyana, D. Sebayang, F. Fajrina et al. // IOP Conference Series Materials Science and Engineering. 2018. Vol. 343. P. 1–8. DOI: 10.1088/1757-899X/343/1/012019
- Трекер UST-AADAT. URL: http://ust.su/solar/catalog/trackers/3114/ (дата обращения: 05.05.2023).
- Солнечный трекер «АD-5000» (система слежения за Солнцем). URL: https://www.alene.ru/products/19879295 (дата обращения: 05.05.2023).
- Dual-Axis Solar Tracker for 15 panels. URL: https://sat-control.net/15-panel-dual/ (дата обращения: 05.05.2023).
- Optimized Single-Axis Schedule Solar Tracker in Different Weather Conditions / N. Kuttybay, A. Saymbetov, S. Mekhilef et al. // Energies. 2020. Vol. 13, no. 19. P. 1–18. DOI: 10.3390/en13195226
- Обухов С.Г., Плотников И.А. Выбор параметров и анализ эффективности применения систем слежения за Солнцем // Известия Томского политехнического университета. Инжиниринг георесурсов. 2018. Т. 329, № 10. С. 95–106. DOI: 10.18799/24131830/2018/10/2109
- Ikhwan M., Mardlijah M., Imron C. Model predictive control on dual axis solar tracker using Matlab/Simulink simulation // 2018 International Conference on Information and Communications Technology (ICOIACT). Yogyakarta: IEEE, 2018. P. 784–788. DOI: 10.1109/ICOIACT.2018.8350791
- A feasibility study of the 1.5-axis tracking model in utility-scale solar PV plants / J. Wong, F. Bai, T.K. Saha et al. // Solar Energy. 2021. Vol. 216. P. 171–179. DOI: 10.1016/j.solener.2020.12.035
- Бирюлин В.И., Куделина Д.В. Автоматизированная система управления небольшой солнечной электростанцией // Auditorium. 2017. № 3 (15). С. 113–118.
- Егоров В.А., Дадашова Ф.И. Система слежения за Солнцем для фотоэлектрической энергоустановки // Научно-технический вестник Поволжья. 2022. № 5. С. 113–116.
- Оценка энергетического потенциала солнечной радиации региона с применением солнечного трекера / В.З. Манусов, Д.С. Ахьёев, М.Х. Назаров и др. // Научный вестник Новосибирского государственного технического университета. 2020. № 1 (78). С. 189–203. DOI: 10.17212/1814-1196-2020-1-189-203
- Горелова А. Ю., Камакшин Е.Е. Система автоматического слежения за Солнцем // Известия Волгоградского государственного технического университета. 2023. № 1 (272). С. 49–53. DOI: 10.35211/1990-5297-2023-1-272-49-53
- A novel UV sensor-based dual-axis solar tracking system: Implementation and performance analysis / C. Jamroen, C. Fongkerd, W. Krongpha et al. // Applied Energy. 2021. Vol. 299. P. 1–17. DOI: 10.1016/j.apenergy.2021.117295
- Development of a machine vision dual-axis solar tracking system / M. Abdollahpour, M.R. Golzarian, A. Rohani et al. // Solar Energy. 2018. Vol. 169. P. 136–143. DOI: 10.1016/j.solener.2018.03.059
- Open hardware/software test bench for solar tracker with virtual instrumentation. / S. Motahhir, A.E. Hammoumi, A.E. Ghzizal et al. // Sustainable Energy Technologies and Assessments. 2019. Vol. 31. P. 9–16. DOI: 10.1016/J.SETA.2018.11.003
- Design for manufacture and assembly of an intelligent single axis solar tracking system / P. Munanga, S. Chinguwa, W.R. Nyemba et al. // Procedia CIRP. 2020. Vol. 91. P. 571–576. DOI: 10.1016/j.procir.2020.03.109
- Jasim B., Taheri P. An Origami-Based Portable Solar Panel System // 2018 IEEE 9th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON). Vancouver, BC: IEEE, 2018. P. 199–203. DOI: 10.1109/IEMCON.2018.8614997
- Design and Implementation of Three-Axis Solar Tracking System with High Efficiency / M.R. Haider, A. Shufian, M.N. Alam et al. // 2021 International Conference on Information and Communication Technology for Sustainable Development (ICICT4SD). Dhaka, Bangladesh: IEEE, 2021. P. 1–5. DOI: 10.1109/ICICT4SD50815.2021.9396779
- Аржанов К.В. Повышение энергетической эффективности систем наведения солнечных батарей на Солнце // Электронные средства и системы управления. Материалы докладов Международной научно-практической конференции. 2015. № 1-1. С. 225–229.
- Системы слежения за Солнцем / М.В. Китаева, А.В. Юрченко, А.В. Скороходов, А.В. Охорзина // Вестник науки Сибири. 2012. № 3 (4). С. 61–67.
- Митрофанов С.В., Немальцев А.Ю., Байкасенов Д.К. Первичная апробация автоматизированного двухкоординатного солнечного трекера в климатических условиях Оренбургской области как перспектива создания программно-аппаратного комплекса // Международный научный журнал Альтернативная энергетика и экология. 2018. № 7-9 (255-257). С. 43–54. DOI: 10.15518/isjaee.2018.07-09.043-054
- Abhilash P., Kumar R.N., Kumar R.P. Solar powered water pump with single axis tracking system for irrigation purpose // Materials Today: Proceedings. 2021. Vol. 39. P. 553–557. DOI: 10.1016/j.matpr.2020.08.336
- Залесский В.С., Кузнецов А.С., Матяш К.В. Разработка трекера для позиционирования солнечных панелей // Сетевой научный журнал ОрелГАУ. 2017. № 1 (8). С. 84–86.
- Ильин В.Ю., Мочалов В.И. Солнечный трекер на платформе Arduino // Наука молодых: Сборник научных статей участников XI Всероссийской научно-практической конференции с международным участием. 2018. С. 185–187.
- Марков А.М., Макеенко А.А., Маркелов М.О. Автоматизированный сервопривод солнечного трекера на базе микроконтроллера Arduino Nano // Вестник Псковского государственного университета. Серия: Технические науки. 2018. № 8. С. 70–82.
- Zhang J., Yin Z., Jin P. Error analysis and auto correction of hybrid solar tracking system using photo sensors and orientation algorithm // Energy. 2019. Vol. 182. P. 585–593. DOI: 10.1016/j.energy.2019.06.032
- SOLPOS Calculator . URL: https://midcdmz.nrel.gov/solpos/solpos.html (дата обращения: 20.02.2023).
- Mao K., Lin F., Ji I.R. Design of ARM-Based Solar Tracking System // 2018 37th Chinese Control Conference (CCC). 2018. P. 7394–7398. DOI: 10.23919/ChiCC.2018.8483773
- Kang H., Hong T., Lee M. A new approach for developing a hybrid sun-tracking method of the intelligent photovoltaic blinds considering the weather condition using data mining technique // Energy and Buildings. 2020. Vol. 209. P. 1–11. DOI: 10.1016/j.enbuild.2019.109708
- Toginho D.G., Archela A., de Melo L.F. Analysis of the Solar Tracking System for a Mobile Robot Prototype // IntechOpen. 2020. P. 1–13. DOI: 10.5772/intechopen.90436
- Safan Y.M., Shaaban S., El-Sebah M.I.A. Hybrid control of a solar tracking system using SUI-PID controller // 2017 Sensors Networks Smart and Emerging Technologies (SENSET). Beirut: IEEE, 2017. P. 1–4. DOI:10.1109/SENSET.2017.8125035
- Developing a dual axis photoelectric tracking module using a multi quadrant photoelectric device / M.I. Bharathi, V. Bhatt, V.V. Ravi Kumar et al. // Energy Reports. 2022. Vol. 8. P. 1426–1439. DOI: 10.1016/j.egyr.2022.07.095
- Development and Accuracy Assessment of a High-Precision Dual-Axis Pre-Commercial Solar Tracker for Concentrating Photovoltaic Modules / M. Angulo-Calderón, I. Salgado-Tránsito, I. Trejo-Zúñiga et al. // Applied Science. 2022. Vol. 12. P. 2–21. DOI: 10.3390/app12052625
- Сологубов А.Ю., Кирпичникова И.М. К вопросу о переходе координатных приводов систем слежения за Солнцем на новые типы электрических машин // Наука ЮУрГУ: материалы 70-й научной конференции. Секции технических наук. 2018. С. 496–503.
- Laseinde T., Ramere D. Low-cost automatic multi-axis solar tracking system for performance improvement in vertical support solar panels using Arduino board // International Journal of Low-Carbon Technologies. Vol. 14, no. 1. 2019. P. 76–82. DOI: 10.1093/ijlct/cty058
- A Review of Time-Based Solar Photovoltaic Tracking Systems / A. Musa, E. Alozie, S.A. Suleiman et al. // Information. 2023. Vol. 14, no. 4. P. 1–32. DOI: 10.3390/info14040211
