Совершенствование алгоритмов распознавания типов объектов в системах управления с применением нечеткой логики в условиях неопределенности

Автор: Колкк Андрей Александрович, Колкк Владимир Андреевич, Ширяев Владимир Иванович
Рубрика: Управление в технических системах
Статья в выпуске: 1 т.20, 2020 года.
Бесплатный доступ
Введение. В основу современных информационных технологий для сложных систем автоматизации в условиях неопределенности положен принцип ситуационного управления. К таким технологиям относятся следующие: экспертные системы, нейросетевые структуры, нечеткая логика и ассоциативная память. Развитие интеллектуальных технологий связано с объединением различных методов обработки знаний. Данное направление обеспечивает повышение быстродействия, сокращение объема знаний. Предполагается возможным объединение нечеткой логики и экспертных систем. Цель исследования. Рассмотреть задачу совершенствования алгоритмов распознавания в системах управления путем объединения методов оптимальной фильтрации и нечеткой логики на этапе вторичной обработки информации о параметрах объектов. Материалы и методы. Для предварительной обработки будем рассматривать фильтры Калмана (ФК), для реализации которых в реальном времени требуется меньше вычислительных ресурсов по сравнению с алгоритмами гарантированного оценивания. В предлагаемом методе применим банк (ФК). Математическое моделирование проводим в программной среде Mathcad 14. В программной среде FuzzyTECH разрабатывается нечеткий проект «Распознавание типа объекта». Разработка нечеткой модели проходит в несколько этапов. Во-первых, представление входных переменных в терминах лингвистических переменных. Во-вторых, опираясь на знания экспертов, определяем термы для лингвистических переменных. В-третьих, создание блока правил. В-четвертых, исследование созданного нечеткого проекта. Результаты. Проведенное математическое моделирование ФК в устройствах слежения за параметрами объектов в процессе распознавания в программной среде Mathcad 14 показало возможность применения банка фильтров в рассмотренных устройствах. Созданы и исследованы алгоритмы распознавания типов объектов с использованием нечёткой логики. Заключение. Созданные алгоритмы системы управления, объединяющие в себе фильтрацию Калмана и нечеткую логику, повышают эффективность системы распознавания.
Информационные технологии, распознавание типов объектов, фильтрация калмана, нечеткая логика
Короткий адрес: https://sciup.org/147232302
IDR: 147232302 | УДК: 623.624 | DOI: 10.14529/ctcr200104
Development of algorithms of automatic recognition of objects in control systems using fuzzy logic in terms of uncertainties
Introduction. The basis of modern information technology for complex automation systems in the face of uncertainty is the principle of situational management. Such technologies include the following: expert systems, neural network structures, fuzzy logic and associative memory. The development of intelligent technologies is associated with the combination of various methods of processing knowledge. This area provides increased performance, reduced knowledge. It is supposed that fuzzy logic and expert systems can be combined. Aim. Consider the task of improving recognition algorithms in control systems by combining optimal filtering methods and fuzzy logic at the stage of secondary processing of information about object parameters. Materials and methods. For preliminary processing, we will consider Kalman filters (FC), for the implementation of which in real time less computing resources are required in comparison with guaranteed estimation algorithms. In the proposed method, we apply FC Bank. We carry out mathematical modeling in the Mathcad 14. In the FuzzyTECH software environment, a fuzzy project “Recognizing the type of an object” is being developed. Development of a fuzzy model takes place in several stages. Firstly, the presentation of input variables in terms of linguistic variables. Secondly, relying on expert knowledge, we define terms for linguistic variables. Thirdly, the creation of a block of rules. Fourth, a study of the created fuzzy project. Results. The mathematical modeling of the FC in the devices for tracking the parameters of objects in the process of recognition in the Mathcad 14 software environment showed the possibility of using a filter bank in the considered devices. Algorithms for recognizing object types using fuzzy logic have been created and studied. Conclusion. The created control system algorithms, combining Kalman filtering and fuzzy logic, increase the efficiency of the recognition system.
Текст научной статьи Совершенствование алгоритмов распознавания типов объектов в системах управления с применением нечеткой логики в условиях неопределенности
В основу современных информационных технологий для сложных систем автоматизации в условиях неопределенности [1] положен принцип ситуационного управления [2]. К таким технологиям относятся следующие: экспертные системы, нейросетевые структуры, нечеткая логика и ассоциативная память [3]. В этой связи интерес к интеллектуальным системам управления будет только возрастать [3–5]. В настоящее время существует фундаментальная теоретическая база интеллектуальных систем управления – это работы Д. Поспелова [6, 7], Л. Заде [8, 9], Т. Тэрано [10], А. Леоненкова [11] и др. Концепция построения интеллектуальных систем управления основана на трех ключевых положениях:
– теории ситуационного управления;
– иерархическом принципе построения системы управления;
– обоснованном использовании четырех интеллектуальных технологий, наиболее разработанных на сегодняшний день (экспертных систем, нечеткой логики, нейронных сетей, ассоциативной памяти) [3, 6].
Данная концепция предполагает использование интеллектуальных систем в случаях, когда для повышения качества управления необходимо учитывать все факторы, влияющие на систему, в том числе информационную неопределенность. Интеллектуальные технологии постоянно претерпевают изменения в процессе своего развития. Одним из направлений этого процесса является объединение методов обработки знаний. Развитие интеллектуальных технологий связано с объединением различных методов обработки знаний. Данное направление обеспечивает повышение быстродействия, сокращение объема знаний. Предполагается возможным объединение нечеткой логики и экспертных систем [11].
Одним из направлений развития концепции является разработка бортовых интеллектуальных систем тактического уровня (БИС-ТУ) для антропоцентрических объектов (Антр/объект) [5]. Одним из этапов функционирования Антр/объекта является решение задачи оперативного целеполагания. Для решения данной задачи необходима поддержка, которую могут оказать бортовые оперативно-советующие экспертные системы типовых ситуаций полета (БОСЭС ТС) [5].
Бортовые оперативно советующие экспертные системы типовых ситуаций (БОСЭС ТС) полета летательного аппарата предназначены для решения задач второго глобального уровня управления (II ГлУУ) [5,12]. II ГлУУ – это задачи, с помощью которых определяются рациональные пути достижения текущей цели полёта, т. е. тактические задачи.
Одной из таких тактических задач является преодоление боевыми самолетами насыщенной ПВО противника. На современном этапе развития бортового радиоэлектронного оборудования создание бортового комплекса обороны (БКО) как БОСЭС ТС экипажа стало объективной необходимостью.
Применение искусственного интеллекта (ИИ) обеспечивает также возможность создания систем обработки сигналов, способных к самообучению, и дает возможность оперативного вмешательства в программу обработки в зависимости от складывающейся обстановки в информационном пространстве. Нечеткая логика, как говорилось выше, является одной из наиболее используемых и разработанных искусственных технологий, применяемых при разработке современных систем управления.
Очевидной областью внедрения интеллектуальных технологий являются всевозможные экспертные системы, в том числе самообучающиеся системы, называемые иначе классификаторами.
1. Постановка задачи
Задача распознавания типов объектов в системах управления бортовых комплексов является чрезвычайно актуальной. Работа всего комплекса состоит из нескольких этапов. На первом этапе сигналы, полученные датчиками, проходят первичную обработку для дальнейшей передачи в систему распознавания.
Второй этап (распознавание) – на основе измеренных параметров принятого сигнала и сравнение их с базой знаний, принятие решения об отнесении объекта к тому или иному типу.
Третий этап – на основе распознавания типа объекта, принятие решения на распределение ресурсов по обслуживанию объекта.
В случае если решение на втором этапе было принято неверное (задача распознавания не выполнена), то и работа всего комплекса по обслуживанию объекта не эффективна. Для повышения эффективности работы системы управления на этапе распознавания необходимо искать пути совершенствования алгоритмов. Применение искусственного интеллекта для качественного анализа принятых сигналов в условиях неопределенности является реальной назревшей необходимостью [3, 4, 6].
В статье ставится и решается задача совершенствования алгоритмов распознавания типов объектов в системах управления путем объединения методов оптимальной фильтрации и нечеткой логики на этапе вторичной обработки информации о параметрах объектов.
2. Распознавание типа объекта
Решение задачи построения системы идентификации объектов представляется возможным с помощью внедрения элементов нечеткой логики. В рамках нечеткого подхода предлагается объединение методов фильтрации и нечеткой логики [13].
В теории распознавания оптимальные решения принимаются на основании байесовской процедуры [14].
Для предварительной обработки будем рассматривать ФК, для реализации которого в реальном времени требуется меньше вычислительных ресурсов по сравнению с алгоритмами гарантированного оценивания [15,16], которые целесообразно применять в случае отсутствия статистической информации о помехах в приемных каналах. В нашем случае применим банк фильтров Калмана (ФК). Структурная схема устройства распознавания объектов (объединение методов ФК и НЛ) представлена на рис. 1.
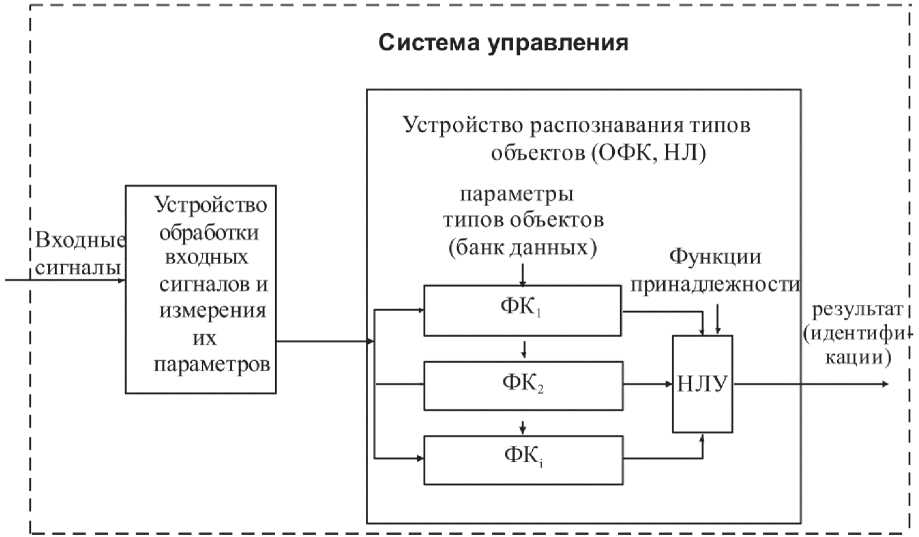
Рис. 1. Структурная схема устройства распознавания объектов (объединение методов ФК и НЛ) Fig. 1. Structural diagram of the object recognition device (combination of Kalman Filter and Fuzzy Logic methods)
Рассмотрим следующую ситуацию. Пусть в некотором районе (информационном пространстве) обнаружена группа объектов. Каждому типу объекта соответствует определенный набор параметров, который создается и хранится в базе данных. База создается на основе знаний экспертов в данной области.
Для использования аппарата фильтрации Калмана необходимо разработать математическую модель процесса эволюции параметров и модель процесса измерения [13]. Записываются уравнения процесса эволюции каждого типа объектов, на основании которых формируется банк фильтров Калмана [17]. Обработка принятых сигналов происходит параллельно.
Рассмотрим ситуацию, при которой отнести наблюдаемый объект к одному из известных типов, о котором занесена информация в базу данных (вектор измерения попадает в области принадлежности двух типов объекта), представляется невозможным (возникает неопределенность) (рис. 2) [13].
Пространство наблюдения в данном случае представлено координатами «параметр t 1 – параметр t 2 ». Оцениваем расположение векторов Х р , Х j и Х i , как видим из рис. 2, объекты, находящиеся в областях пространства О j и О р , относятся к классу К j и К р , т. е. их тип определяется однозначно. Для некоторого i -го неизвестного объекта измеренный вектор Х i не позволяет провести опознавание и отнести его к одному из известных типов, так как вектор X i находится в области пространства (заштрихованная область на рис. 2), которая однозначно не может быть отнесена к какому-либо типу объектов.
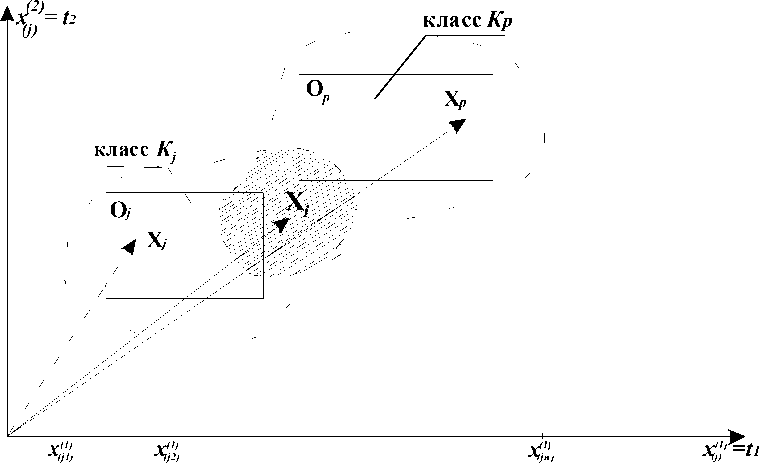
Рис. 2. Области пространства принадлежности типа объекта
Fig. 2. Object Type Ownership Space Regions
Применение банков фильтра Калмана позволяет сузить область пространства распознавания, в которое попадает вектор X i (рис. 3, 4). В первом случае (см. рис. 3) неопределённость в классификации не возникает и вектор Xi располагается в области O j , т. е. относится к классу К j . Во втором случае (см. рис. 4) неопределенность остается, возникает неоднозначная ситуация, когда пространства принадлежности объекта пересекаются, в этом случае и применяем нечеткую логику.
Применение нечеткой логики для данного случая (см. рис. 4) в условиях недостаточности информации о характеристиках наблюдаемых объектов позволяет полнее использовать знания, полученные ранее, а также с помощью программной среды fuzzyTECH вносить оперативную информацию о вновь полученных данных. Знания экспертов используются для создания нечеткой модели устройства распознавания.
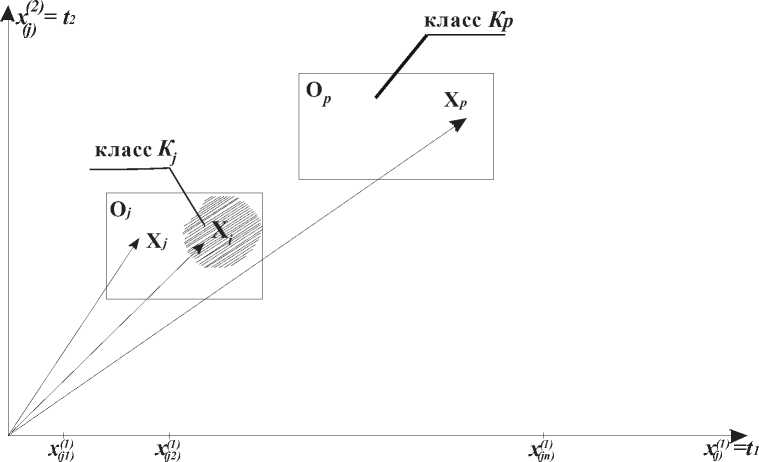
Рис. 3. Области пространства принадлежности типа объекта (ФК) Fig. 3. Object Type Ownership Space Regions (Kalman Filter)
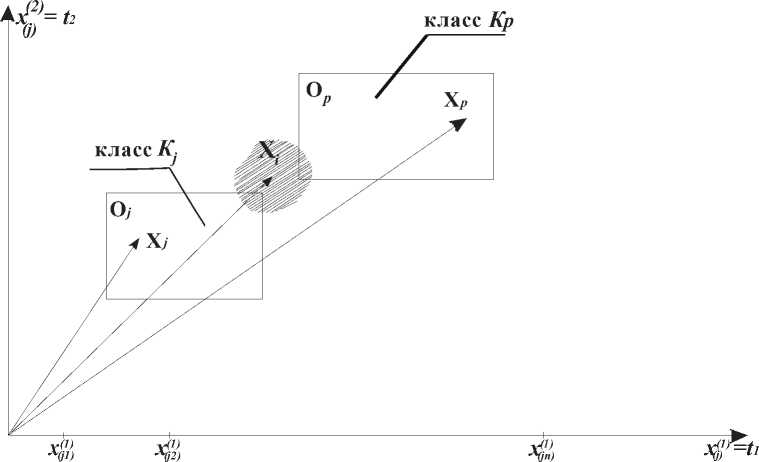
Рис. 4. Области пространства принадлежности типа объекта (НЛ) Fig. 4. Object Type Ownership Space Regions (Fuzzy Logic)
Проведенное математическое моделирование ФК в устройствах слежения за параметрами объектов в процессе распознавания в программной среде Mathcad 14 показало возможность применения банка фильтров в рассмотренных устройствах [13, 18, 19].
Были построены следующие модели слежения:
-
– модель для слежения за изменяющимся параметром (скорость изменения параметра много меньше периода измерения);
-
– модель, где измеряемый параметр может изменяться скачкообразно, по случайному закону (скорость изменения параметра сопоставима с периодом измерения);
-
– модель слежения за угловым положением наблюдаемого объекта (поступательное движение объекта).
В результате исследования моделей слежения (типичные ситуации) получены положительные результаты [13, 19]:
– повышается вероятность принятия решения об отнесении наблюдаемого объекта к тому или иному типу; – повышена устойчивость слежения за движущимися объектами; – уменьшается вероятность срыва слежения за маневрирующим объектом, а также принятия решения о появлении нового типа объекта [13, 19]. 3 . Построение нечеткой модели «Распознавание типа объекта»
В программной среде FuzzyTECH разрабатывается нечеткий проект «Распознавание типа объекта». Разработка нечеткой модели проходит в несколько этапов. Во-первых, представление входных переменных в терминах лингвистических переменных. Во-вторых, опираясь на знания экспертов, определяем термы для лингвистических переменных. В-третьих, создание блока правил. В-четвертых, исследование созданного нечеткого проекта и коррекция разработанной модели [19].
Определяем входные переменные в терминах лингвистических переменных, которые являются параметрами, характеризующими тип наблюдаемого объекта. Это следующие: скорость объекта (V), площадь объекта (S), принадлежность объекта (T), дистанция до объекта (D). Выходной лингвистической переменной с термами, определяющими классификацию объектов, обозначаем «TIP». Исследование нечеткого проекта проводим в программной среде fuzzyTECH (рис. 5).
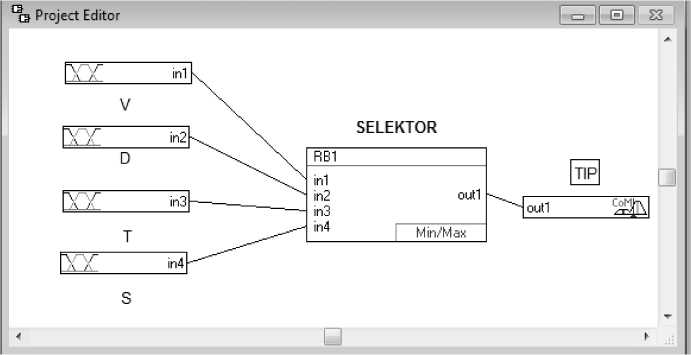
Рис. 5. Нечеткий проект «Распознавания типов объектов» в программной среде fuzzyTECH Fig. 5. Fuzzy project “The Object Type Recognition” in the software environment fuzzyTECH
Термы для входных лингв истических переменных определяем исходя из выбранных пар аметров (характеристик), необх одимых для классификации типов объектов . Например, функция принадлежности термов входной переменной «дистанция до объекта» ( D) имеет вид (рис. 6).
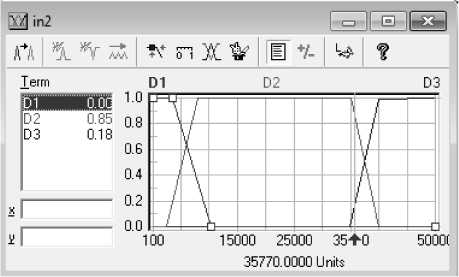
Рис. 6. Функция принадлежности лингвистической переменной «D»
Fig. 6. The function of belonging of linguistic variable “D”
В результате проведенной классификации объектов по измеряемым п араметрам, создается блок правил, определяющий з начение термов выходной переменной. Данн ые по типам сущес т вующих объектов на основании знаний экспертов вносятся в созданный блок правил. Блок пра вил представляет собой логиче ские рассуждение «Если …, то….». В наше м случае набору пар а метров (их величинам (термам )) соответствует тип наблюдаемого объекта. Блок правил разраб атываемого нечеткого проекта представлен на рис. 7.
|
О Spreadsheet Rule Editor - RBI | □ | | El |^^ |
|||
|
&И0 fl 1 Ф US M ! ^ ^ .-. |
|||
|
# |
IF THEN in1 in2 in3 in4 DoS out1 |
||
|
1 |
VI pl 1 SI 1.00 TIP1 |
||
|
2 |
V2 D2 I S4 1.00 TIPS |
||
|
3 |
V2 DI 1 S3 1.00 TIP2 |
||
|
4 |
V3 D3 I 1.00 TIP4 |
||
|
5 |
VI D3 1 S3 1.00 TIPS |
||
|
p |
D2 I 1.00 TIPS |
||
|
7 |
DI M 1.00 TIP4 |
||
|
8 |
|||
Рис. 7. Блок правил (7 правил) Fig. 7. Rule block (7 rules)
Функция принадлежности вы ходной лингвистической переменной будет иметь вид (рис. 8).
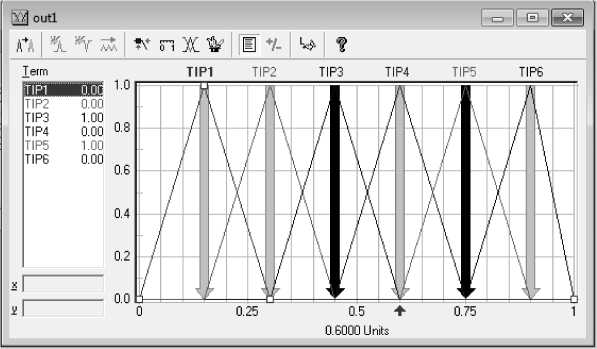
Рис. 8. Выходная переменная «TIP»
Fig. 8. Output variable “TIP”
Для повышения эффективно сти разработанной нечеткой модели функц ии принадлежности входных и выходных переменны х их весовые коэффициенты выбираются и сходя из предпол а гаемой обстановки, наличия сущ ествующих типов наблюдаемых объектов в к онкретном регионе.
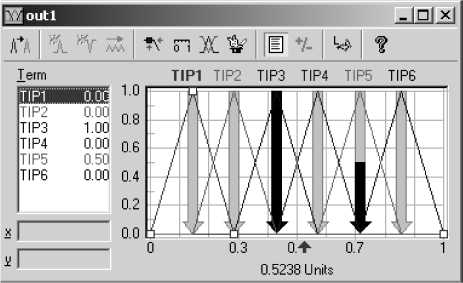
Рис. 9. Выходная переменная «TIP» (изменены весовые коэффициенты) Fig. 9. Output variable “TIP” (weight coefficients are changed)
Исследования созданной неч еткой модели показывает, что возникают си туации, когда одн о значное определение типа объекта затруднено. Внесение изменений в весовые коэффициенты на основании знаний экспертов о н ахождении в данном регионе определенных типов объектов п о зволяет повысить вероятность пр авильного распознавания (рис. 9). Для терма « TIP3» определяем коэффициент 1, а для терма « TI P5» – 0,5 (см. рис. 9). В результате наблюдаем, что тип объекта определяется как «TIP 3» с вероя тностью 1. Для повышения эффективности р азработанных алг о ритмов необходимо ввести новы й измеряемый параметр, который позволит однозначно отнести наблюдаемый объе кт к определ енному типу. Вводим дополнительную пер еменную « priznak». Затем вносим изменения в блок правил (изменяем правила 2, 6, 7, 8) (рис. 10):
ПРАВИЛО 2: ЕСЛИ скорость объекта V2, дальность до объекта D2, принадлежность I, площадь S4, дополнительный признак « no», то объект относится к TIP3;
ПРАВИЛО 6: ЕСЛИ дальность до объекта D2, принадлежность I, дополнительный признак TIP5, то объект относится к TIP 5;
ПРАВИЛО 7: ЕСЛИ скорость объекта V2, дальность D2, принадлежность I, площадь S4, дополнительный признак TIP 3, то объект относится к TIP3.
ПРАВИЛО 8: ЕСЛИ дальность до объекта D2, принадлежность I, дополнительный признак «no», то объект относится к TIP 5.
При срабатывании правила 6 происходит однозначное определение типа объекта.
|
^ |
^ и |
и ее | ф :ib |
bi I I I |
L^ ^ |
|
|
IF |
THEN |
||||
|
in1 |
in2 in3 |
in4 |
jn5 |
DoS out1 |
|
|
1 |
V1 |
D1 I |
81 |
□ 1.00D TIP1 |
|
|
2 |
V2 |
D2 I |
84 |
no |
□ 0.50Q TIP3 |
|
3 |
V2 |
D1 I |
S3 |
□ 1.00D TIP2 |
|
|
4 |
V3 |
D3 I |
□ 1.00D TIP4 |
||
|
5 |
V1 |
D3 I |
S3 |
□i.ooD tip6 |
|
|
6 |
D2 I |
TIPS |
|1.OO| TIPS |
||
|
7 |
V2 |
D2 I |
84 |
TIP3 |
□i.ooD tips |
|
8 |
D2 I |
no |
□o.soD tips |
||
|
8 |
D1 M |
— |
□ 1.00D TIP4 |
Рис. 10. Блок правил (9 правил) Fig. 10. Rule block (9 rules)
Функция принадлежности выходной лингвистической переменной по сле внесения измен е ний в правила будет иметь вид (рис. 11). Оперативное внесение изменений в структуру нечеткого проекта позволяет учитывать быстр оменяющуюся обстановку как появление новых типов объек тов, не входящих в классифика цию, так и изменение параметров существую щих.
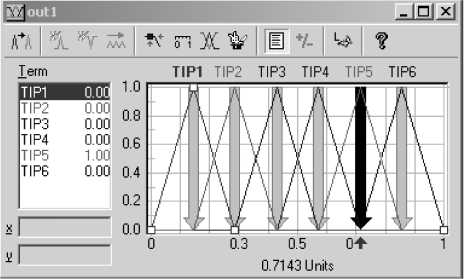
Рис. 11. Выходная переменная «TIP» (9 правил) Fig. 11. Output variable “TIP” (9 rules)
Для внедрения разработан ных алгоритмов в существующие комплекс ы необходима только установка дополнительного пр ограммного обеспечения, что повышает эф фективность системы распознавания типов наблюдаемых объектов и не требует больших затрат.
Заключение
Сист емы управления ком плексами слежения за объектами предпола гают решение задачи распознавания типа объекта и представляют собой сложные технические с истемы. Создание с о временных систем управления комплексами слежения требует новых, нетра диционных подходов. Пр едложенный метод объедин ения фильтрации Калмана и нечеткой логи ки позволяет решать задачи распознавания. Резуль таты исследования математических моделей фильтра Калмана и нечеткой модели « Распознава ние типов объектов» показывают повышени е эффективности си с темы управления. База правил нечеткого проекта может быть оперативно скорректирована при изменении условий наблюдени я, а также при появлении новых типов объе ктов, не попадающих под существую щую классифи кацию. Существующие комплексы распол агают возможностью внедрения в них программного обеспечения, обеспечивающего работу системы управления, использующей эле менты нечеткой логики.
Список литературы Совершенствование алгоритмов распознавания типов объектов в системах управления с применением нечеткой логики в условиях неопределенности
- Трауб, Дж. Информация, неопределенность, сложность / Дж. Трауб, Г. Васильковский, Х. Вожьняковский. - М.: Мир, 1988. - 184 с.
- Шалыгин, А.С. Методы моделирования управления движением беспилотных летательных аппаратов / А.С. Шалыгин, Л.Н. Лысенко, О.А. Толпегин; под ред. А.В. Ноздрачева и Л.Н. Лысенко. - М.: Машиностроение, 2012. - 584 с.
- Создание интеллектуальных систем автоматизации и управления на основе современных информационных технологий / И.М. Макаров, В.М. Лохин, С.В. Манько, М.П. Романов // Мехатроника, автоматизация, управление. - 2007. - № 4. - С. 13-20.
- Бобырь, М.В. Нечёткий цифровой фильтр для управления роботом-манипулятором / М.В. Бобырь, М.Ю. Лунева, К.А. Ноливос // Мехатроника, автоматизация, управление. - 2019. - Т. 20, № 4. - С. 244-250. DOI: 10.17587/mau.20.244-250
- Федунов, Б.Е.. Бортовые интеллектуальные системы тактического уровня для антропоцентрических объектов (примеры для пилотируемых летательных аппаратов) / Б.Е. Федунов. - М.: Де' Либри, 2018. - 246 с.
- Поспелов, Д.И. Ситуационное управление: теория и практика / Д.И. Поспелов. - М.: Наука, 1986. - 288 с.
- Нечеткие множества в моделях управления и искусственного интеллекта / А.Н. Аверкин, И.З. Батыршин, А.Ф. Блишун и др.; под ред. Д.А. Поспелова. - М.: Наука, 1986. - 312 с.
- Заде, Л.А. Понятие лингвистической переменной и его применение к принятию приближенных решений / Л.А. Заде. - М.: Наука, 1974. - 167 с.
- Беллман, Р.Э. Принятие решений в расплывчатых условиях / Р.Э. Беллман, Л.А. Заде // Вопросы анализа процедуры принятия решений. - М.: Наука, 1976. - С. 172-215.
- Тэрано, Т. Прикладные нечеткие системы / Т. Тэрано, К. Асаи, М. Сугэно; под ред. Т. Тэрано. - М.: Мир, 1993. - 368 с.
- Леоненков, А.В. Нечеткое моделирование в среде MATLAB и fuzzyTECH / А.В. Леоненков. - СПб.: БХВ Петербург, 2005. - 736 с.
- Федунов, Б.Е. Модель "Этап" для разработки облика бортовых интеллектуальных систем антропоцентрических объектов / Б.Е. Федунов // Онтология проектирования. - 2012. - № 2. - С. 36-43.
- Колкк, А.А. Совершенствование алгоритмов оценки параметров радиосигналов с использованием аппарата нечеткой логики при вторичной обработке информации в авиационных комплексах радиоэлектронного подавления / А.А. Колкк // Новые технологии: материалы IX Всерос. конф. - М.: РАН, 2012. - Т. 1. - С. 135-143.
- Хант, Э. Искусственный интеллект / Э. Хант. - М.: Мир, 1978. - 558 с.
- Кац, И.Я. Минимаксная многошаговая фильтрация в статистически неопределенных ситуациях / И.Я. Кац, А.Б. Куржанский // Автоматика и телемеханика. - 1978. - № 11. - С. 79-87.
- Ширяев, В.И. Синтез управления линейными системами при неполной информации / В.И. Ширяев // Изв. РАН. Техническая кибернетика. - 1994. - № 3. - С. 229-237.
- Семушин, И.В. Устойчивые алгоритмы фильтрации - обзор и новые результаты для систем судовождения / И.В. Семушин, Ю.В. Цыганова, К.В. Захаров // Информационные технологии и вычислительные системы. - 2013. - № 3. - С. 90-112.
- Безмен, Г.В. Функциональное диагностирование динамических систем с использованием нечетких правил анализа и принятия решений об отказе / Г.В. Безмен, Н.В. Колесов // Изв. РАН. Теория и системы управления - 2011. - № 3. - С. 3-12.
- Об алгоритмах распознавания типов радиоэлектронных средств в бортовых комплексах разведки / А.А. Колкк и др. // Актуальные вопросы исследований в авионике: теория, обслуживание, разработки: материалы II Всероссийской НПК "АВИАТОР" (11-13 февраля 2015 г.). - Воронеж: ВУНЦ ВВС "ВВА", 2015. - Т. 2. - С. 86-92.
