Совершенствование методов и процессов для обеспечения надежности радионавигации системы среднемагистральных самолетов

Автор: Буй Ч.Н., Нгуен В.Ч., Пащенко Ф.Ф., Ву Х.Ф., Ле Д.Т.
Рубрика: Управление сложными системами
Статья в выпуске: 3, 2023 года.
Бесплатный доступ
В практике полетов продолжают встречаться случаи полных и функциональных отказов навигационных датчиков и компьютеров, погрешностей измерения навигационных параметров, которые выходят за допустимые пределы, а также различные нарушения в функционировании аэронавигационной системы обеспечения полетов среднемагистральных самолетов. Такие ситуации снижают способность навигации соответствовать требованиям к аэронавигационной точности из-за возможных отклонений, которые приводят к снижению навигационных возможностей воздушных судов. Для этого рассмотрена методика совершенствования интегрированных инерциально-спутниковых радионавигационных систем для увеличения точности среднемагистральных самолетов.
Радионавигация, среднемагистральный самолет, навигационные датчики, инерциальная радионавигационная система
Короткий адрес: https://sciup.org/148326864
IDR: 148326864 | УДК: 629.052 | DOI: 10.18137/RNU.V9187.23.03.P.60
Improving methods and processes to ensure the reliability of the radio navigation system of medium-haul aircraft
In the practice of flights, there continue to be cases of complete and functional failures of navigation sensors and computers, errors in measuring navigation parameters that go beyond the permissible limits, as well as various violations in the functioning of the aeronautical system for ensuring flights of medium-haul aircraft. Such situations reduce the ability of navigation to meet the requirements for aeronautical accuracy due to possible deviations that lead to a decrease in the navigation capabilities of aircraft. For this purpose, the methodology of improving integrated inertial satellite radio navigation systems to increase the accuracy of medium-haul aircraft is considered.
Текст научной статьи Совершенствование методов и процессов для обеспечения надежности радионавигации системы среднемагистральных самолетов
Наземная навигация включает в себя систему расчета координат, визуальную навигацию, радионавигацию и некоторые другие методы позиционирования. Основной задачей наземной радионавигации является определение местоположения воздушных судов (далее – ВС). Специальные радионавигационные системы предоставляют информацию о направлениях, углах, расстояниях, псевдодиапазонах и комбинациях этих типов информации.
Радионавигационные системы требуют технически сложной конструкции большого набора высоких антенн и дорогостоящей инфраструктуры [1]. Большинство радионавигационных систем зависят от измерения или определения каким-либо образом расстояния от ВС до текущего местоположения получателя.
Глобальные наземные навигационные системы включают в себя систему «Альфа», разработанную в СССР (2020) и Omega, разработанню в США (2020). В Omega применяется
Совершенствование методов и процессов для обеспечения надежности радионавигации ...
Буй Чонг Нгиа аспирант, Московский авиационный институт (национальный исследовательский университет), Москва. Сфера научных интересов: радиолокационная техника и оборудование радара, методы шифрования и защиты в радиоволнах и радаре, применение радара и определение местоположения в медицине и научных исследованиях. Автор двух опубликованных научных работ.
пересечение линий позиций с использованием измерений расстояния для определения нахождения пользователя. Для обеспечения более высокой точности приема сигнала можно использовать как минимум три или более независимых системы измерения расстояния [2].
В 2006 году было предложено перейти от использования наземных навигационных средств к использованию спутниковой и воздушной навигации в качестве основного средства навигации [3]. С этого времени система глобального позиционирования (далее – GPS) стала признанным основным методом навигации в наземных и морских путешествиях.
В наземной радионавигации широко применяется всенаправленная дальнобойная и дальномерная аппаратура; первая позволяет приемнику измерять пеленг на маяк или от него, вторая используется для измерения расстояния от воздушного судна до навигационного маяка. При использовании дальномерной аппаратуры дрон отправляет сигнал, который возвращается после фиксированной задержки, определяемой аппаратным обеспечением; расстояние до маяка вычисляется на основе задержки сигнала, полученной приборами дальномерной аппаратуры [2].
Для определения положения воздушного судна в пространстве используются три координаты. В радионавигации для этой цели используются поверхности позиций и линии положений. Положение воздушного судна может быть определено на основе двух позиционных линий или трехпозиционных поверхностей, либо позиционной линии и позиционной поверхности. В качестве навигационных параметров могут быть использованы: угол места, угол азимута, расстояние, разность расстояний или сумма расстояний [4].
Анализ погрешностей при определении координат летательных аппаратов с помощью метода измерения расстояния рассматривается в работе [6]. В статье [7] исследуется точность метода измерения разности расстояний. Однако в этих исследованиях не сравниваются различные типы наземных радионавигационных методов.
В связи с этим в данном исследовании анализируется точность измерения расстояния, разности расстояний и интегрального измерения угла/измерения расстояния с помощью наземных радионавигационных методов с использованием симуляций. Для этого моделируется динамика полета летательного аппарата, а затем сравниваются полученные координаты с фактическими значениями. Метод определения положения воздушного судна с наибольшей точностью определяется путем сравнения абсолютных погрешностей исследуемых методов.
Интеграция спутниковых систем позиционирования GPS/ГЛОНАСС с радиосистемами ближнего и дальнего действия
Один из примеров комплексного взаимодействия навигационных систем – это интеграция спутниковых систем позиционирования GPS/ГЛОНАСС с радиосистемами ближнего и дальнего действия. Это объединение различных систем позволяет получить более надежную и точную навигацию для различных приложений.
Комбинированная спутниковая навигационная система GPS/ГЛОНАСС обеспечивает доступ к сигналам навигационных спутников обеих систем. Это позволяет получать более широкий спектр сигналов и увеличивает количество видимых спутников, что улучшает точность определения местоположения и времени. Интеграция этих спутниковых систем обеспечивает устойчивость и надежность навигации в различных условиях. Кроме того, интеграция систем навигации с радиосистемами ближнего и дальнего действия добавляет дополнительные функциональные возможности. Например, радиосистемы ближнего действия могут обеспечивать обмен данными с другими близкими устройствами, такими как автомобили, дроны или устройства IoT. Это позволяет реализовать функции кооперативного позиционирования, обнаружения препятствий и обмена информацией между различными устройствами.
Проблема точности является значительным фактором, влияющим на надежность и точность навигационных систем, таких как комбинированная спутниковая навигационная система GPS/ГЛОНАСС и интеграция с радиосистемами ближнего и дальнего действия. Помехи могут возникать из различных источников и оказывать негативное влияние на работу системы. Поэтому следующим шагом является разработка системы идентификации, которая позволяет однозначно идентифицировать каждую унифицированную серию систем радионавигации в самолете.
Совершенствование методов и процессов для обеспечения надежности радионавигации ...
Математическая модель движения летательного аппарата
Для решения поставленной задачи математическая модель движения летательного аппарата состоит из моделей продольного и поперечного движения. Продольное движение самолета состоит из поступательного, вертикального и тангажного движений. Вектор состояния X u и управляющий вектор U u продольной модели могут быть записаны в следующем виде:
X U = [ uwq 0 ] T ,
Uu = ^L где u – скорость полета самолета вперед, м/с; w – вертикальная скорость летательного аппарата, м/с; q – скорость тангажа летательного аппарата, градус /с; θ – угол тангажа самолета, градус; δE – отклонение руля высоты, градус.
В методе измерения расстояния позиционная поверхность представляет собой сферу с радиусом D – расстоянием от станции до летательного аппарата. Таким образом, положение летательного аппарата в пространстве может быть найдено путем пересечения трех поверхностей положения D = const. Пересечение n трех сфер показано на Рисунке 1.
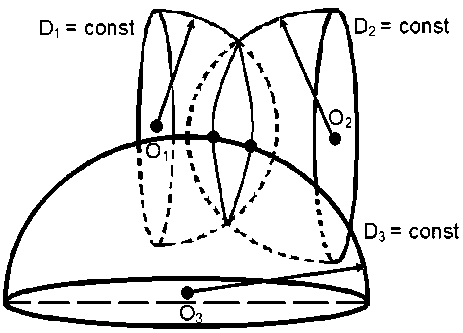
Рисунок 1. Пересечение трех сфер [8]
Поскольку при пересечении трех сфер есть две точки пересечения, результаты этого метода не определенны. Чтобы сделать этот метод более точным, его можно интегрировать с дополнительными навигационными системами с низкой точностью (см. Рисунок 2).
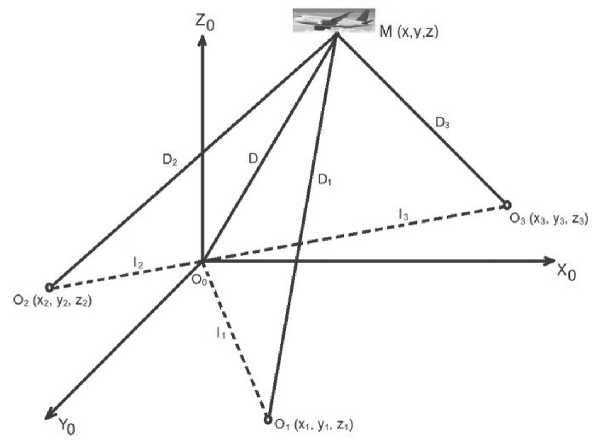
Рисунок 2. Схема метода измерения расстояния при определении положения воздушного судна
При измерении разности расстояний в радионавигационных системах среднемагистральных самолетов в качестве навигационных параметров принимаются расстояния от двух наземных станций до летательных аппаратов [9]. Измерение разности расстояний ∆ D позволяет определить, что летательный аппарат находится на поверхности. Эта поверхность выполнена в виде вращающихся гиперболоидов двухстворчатой ступени, имеющей измерительные станции по центрам О и О 1 (см. Рисунок 3).
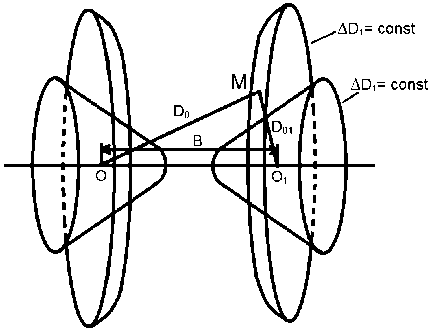
Рисунок 3. Иллюстрация поверхностей состояния в методе измерения разности расстояний
Положение ВС найдено как точка пересечения трех поверхностей состояния. Таким образом, радионавигационная система измерения разности расстояний включает в себя четыре наземные станции. Одна из этих станций является маршрутизатором (главная станция), а остальные – directed (вспомогательные станции). С сигналов, посылаемых главной станцией, предусматривается синхронная работа трех направленных станций. С помощью метода разности расстояний мы выводим следующие выражения и получаем координаты летательного аппарата x , y и z :
x 1 x + y 1 y + z 1 z - D∆D1 = f 1; (1)
x 2 x + y 2 y + z 2 z - D∆D2 = f 2; (2)
x 3 x + y 3 y + z 3 z - D∆D3 = f 3. (3)
С помощью решения уравнений (1)–(3) найдены выражения, необходимые для координат летательных аппаратов x , y , z .
Данная модель позволяет интегрировать все десять типов блоков инерциальных датчиков первичной информации с многоканальным приемником спутниковой навигационной системы с использованием наиболее перспективной схемы интеграции – глубоко интегрированной схемы. Это позволяет создать десять различных вариантов бесплатфор-менных инерциальных спутниковых навигационных систем.
Совершенствование методов и процессов для обеспечения надежности радионавигации ...
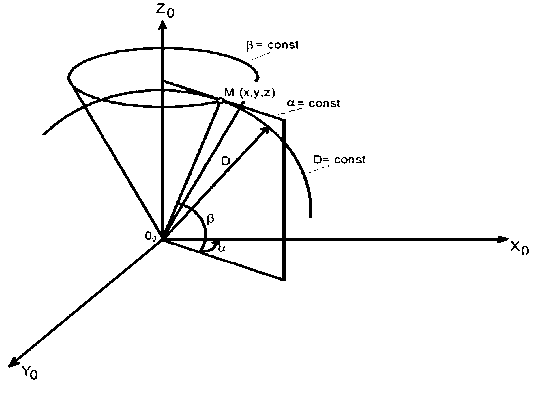
Рисунок 4. Иллюстрация поверхностей состояний в интегральном методе Заключение
На этапе характеризации была проведена экспертная оценка основных характеристик этих систем, включая стоимость и первоначальные версии интегрированной инерциально-спутниковой радионавигационной системы. Это позволяет оценить эффективность и применимость различных вариантов системы, а также определить их экономическую целесообразность.
Таким образом, разработанная модель предлагает новый подход к интеграции блоков инерциальных датчиков с приемником СНС, предоставляя несколько вариантов интегрированных бесплатформенных инерциальных спутниковых навигационных систем. Это позволяет улучшить точность и надежность навигации, а также расширить возможности и функциональность системы.
Список литературы Совершенствование методов и процессов для обеспечения надежности радионавигации системы среднемагистральных самолетов
- Bhardwaj A. (2020) Terrestrial and Satellite-Based Positioning and Navigation Systems. A Review with a Regional and Global Perspective. Engineering Proceedings, 2020, No. 2, Pp. 41, 2-7.
- Hajiev C., Sametoglu A. (2021) Accuracy in Determining Aircraft Position by Terrestrial Radio Navigation.International Journal of Aviation Science and Technology, 2021, No. 2, Pp. 49-56.
- Nallusamy T., Priya D., Rajeswari B., Siddika N. (2016) Navigation systems in noe flight sensors and their integration. ArXiv, 2016, No. 11, Pp. 1285-1292.
- Cheng Z., Zhao L. (2023) A Review on Navigation Methods for High-Speed Aircraft. Proceedings of the International Conference on Robotics and Automation, 2023, No. 18, Pp. 71-79.
- Fried W.R. (2022) New Developments in Radar and Radio Sensors for Aircraft Navigation. IEEE Transactions on Aerospace and Electronic Systems, AES-10, 2022, No. 1, Pp. 25-33.
- Ely J.J., Nguyen T.X., Koppen S.V., Salud M.T. (2022) Electromagnetic Interference Assessment of CDMA and GSM Wireless Phones to Aircraft Navigation Radios. Proceedings: ehe 21st Digital Avionics Systems Conference, 2022, No. 3(21), Pp. 89-95.
- Erkal Y., Haciyev Q. (2004) Determination of aircraft motion parameters using GNSS based on distance difference measurement and Doppler methods and error analysis. Aviation Advanced Technologies and Applications Symposium, 2004, No. 1, Pp. 101-133.
- Skrypnik O. (2019) Radio Navigation Systems for Airports and Airways. Information Technology Journal, 2019, No. 13, Pp. 885-894.
- Zhang X., Luo Z., Kang G. (2022) Analysis and Research on the Interference of Civil Aviation Radio Navigation Equipment. Journal of Physics: Conference Series, 2022, Pp. 22-29.
- Thompson M., Roberts, S., Johnson A. (2018) Simulation and Analysis of Flight Control Algorithms for Autonomous Aircraft. Proceedings of the International Conference on Robotics and Automation, 2018, Pp. 210-225.
