Современные технологии направленного бурения: сравнительная характеристика ВЗД и РУС

Автор: Синдаров Ж.Ф., Танирбергенов К.К.
Журнал: Мировая наука @science-j
Рубрика: Основной раздел
Статья в выпуске: 5 (98), 2025 года.
Бесплатный доступ
Статья посвящена сравнительному анализу двух технологий направленного бурения - винтового забойного двигателя (ВЗД) и роторной управляемой системы GeoPilot. Рассматриваются конструктивные особенности, принципы работы и эксплуатационные характеристики обеих систем, а также их преимущества и недостатки в условиях сложных геологических профилей. Особое внимание уделено точности управления траекторией скважины, устойчивости к вибрациям, а также влиянию на эффективность бурения. Анализ показывает, что технологии GeoPilot, основанные на системе эксцентричных колец и высокоточной электронике, обеспечивают более стабильное и управляемое бурение без необходимости перехода на режим скольжения, характерный для ВЗД. Выводы статьи направлены на определение оптимальных критериев выбора бурового оборудования в зависимости от задач и условий бурения.
Технология направленного бурения, винтовой забойный двигатель
Короткий адрес: https://sciup.org/140311495
IDR: 140311495
Modern technologies of directional drilling: comparative characteristics of PDM and RSS
This article presents a comparative analysis of two directional drilling technologies - the Positive Displacement Motor (PDM) and the Rotary Steerable System (GeoPilot). It examines the design features, operating principles, and performance characteristics of both systems, along with their advantages and limitations under complex geological conditions. Particular attention is paid to trajectory control accuracy, vibration resistance, and overall drilling efficiency. The analysis demonstrates that GeoPilot technologies, based on an eccentric ring system and advanced electronics, provide more stable and precise directional control without the need for slide drilling, typical of PDMs. The conclusions help define the optimal selection criteria for drilling equipment depending on specific drilling tasks and environmental conditions.
Текст научной статьи Современные технологии направленного бурения: сравнительная характеристика ВЗД и РУС
This article presents a comparative analysis of two directional drilling technologies — the Positive Displacement Motor (PDM) and the Rotary Steerable System (GeoPilot). It examines the design features, operating principles, and performance characteristics of both systems, along with their advantages and limitations under complex geological conditions. Particular attention is paid to trajectory control accuracy, vibration resistance, and overall drilling efficiency. The analysis demonstrates that GeoPilot technologies, based on an eccentric ring system and advanced electronics, provide more stable and precise directional control without the need for slide drilling, typical of PDMs. The conclusions help define the optimal selection criteria for drilling equipment depending on specific drilling tasks and environmental conditions.
СОВРЕМЕННЫЕ ТЕХНОЛОГИИ НАПРАВЛЕННОГО БУРЕНИЯ:
СРАВНИТЕЛЬНАЯ ХАРАКТЕРИСТИКА ВЗД И РУС
MODERN DIRECTIONAL DRILLING TECHNOLOGIES: COMPARATIVE CHARACTERISTICS OF PDM AND RSS Введение
Современные технологии направленного бурения играют ключевую роль в освоении сложных месторождений углеводородов, включая глубоководные и шельфовые зоны, а также трудноизвлекаемые запасы. Эффективность бурения напрямую зависит от возможностей управления траекторией скважины, что делает выбор оборудования критически важным.
На протяжении десятилетий забойные двигатели (ВЗД) были основным инструментом для выполнения направленного бурения. Однако их ограничения, такие как необходимость работы в режиме скольжения, низкая устойчивость к вибрациям и сложности работы на больших глубинах, привели к разработке более совершенных технологий. Одной из них стали роторные управляемые системы (РУС), которые представляют собой революционное решение, позволяющее повысить точность бурения и сократить эксплуатационные издержки.
РУС отличаются от ВЗД способностью корректировать траекторию скважины при непрерывном вращении бурильной колонны, что улучшает удаление шлама, снижает риск прихватов и ускоряет процесс бурения. Эти системы активно применяются в сложных геологических условиях и демонстрируют высокую эффективность при горизонтальном бурении.
Цель статьи – провести сравнительный анализ принципов работы забойных двигателей (ВЗД) и роторной управляемой системы GeoPilot, выявить их ключевые технологические различия, преимущества и недостатки в различных условиях бурения. На основе этого анализа определяются критерии выбора оптимальной технологии для решения конкретных задач направленного бурения, включая работу в сложных геологических условиях.
Принцип работы ВЗД в наклонно-направленном бурении
Забойный двигатель (ВЗД) – это гидромеханическое устройство, преобразующее энергию потока бурового раствора во вращательное движение долота. При наклонно-направленном бурении ключевую роль играет компоновка низа бурильной колонны (КНБК) с искривленным переводником или изгибаемым элементом, создающим постоянный угол перекоса (обычно 0.5-3°).

Рис.1 Уголь
перекоса ВЗД
Основные особенности работы :
-
• В режиме "скольжения" (slide drilling) вращение колонны прекращается, и искривленный участок КНБК задает направление бурения
-
• После набора нужного угла вращение колонны возобновляется для стабилизации траектории
-
• Интенсивность искривления зависит от:
-
• Угла перекоса КНБК
-
• Жесткости бурильных труб
-
• Осевой нагрузки на долото (WOB) Ограничения технологии ВЗД
Несмотря на широкое применение, ВЗД имеет существенные технологические ограничения:
-
1. Высокое трение в режиме скольжения приводит к:
-
• Застреванию колонны
-
• Повышенному износу оборудования
-
• Снижению скорости проходки
-
2. "Собачьи ноги" – локальные искривления ствола, осложняющие:
-
• Спуск обсадных колонн
-
• Эксплуатацию скважины
-
3. Ограниченная точность при сложных траекториях
Направленное бурение с использованием роторного привода осуществляется за счёт отклонения долота посредством геонавигационного инструмента — Геопилота. Ключевым элементом данного устройства является гибкий вал, изгибающийся внутри корпуса за счёт системы эксцентричных колец (Eccentric Rings). Эта система реализует метод управления направлением бурения по принципу point-the-bit, обеспечивая точное отклонение долота в заданную сторону.
Для предотвращения вращения корпуса Геопилота относительно стенок скважины в конструкции предусмотрены специальные анти-ротационные ролики (Anti-Rotation Device), получившие неофициальное название pizza cutters. Эти острые металлические ролики врезаются в стенку скважины, эффективно фиксируя корпус инструмента на месте и позволяя при этом свободное осевое перемещение вверх и вниз.
Эксцентрики, задающие изгиб вала, не имеют собственных приводов. Управление их положением осуществляется посредством тормозного механизма При необходимости изменения ориентации эксцентрика его тормоз временно отключается, и вращение внутреннего вала Геопилота передаётся на эксцентрик В нужный момент, когда эксцентрик достигает заданного углового положения, тормоз снова включается, фиксируя кольцо.
Конструктивно Геопилот состоит из трёх основных элементов:
Верхний консольный подшипник (cantilever bearing) — жёстко удерживает вал в неподвижном состоянии выше зоны изгиба;
Эксцентричные кольца (bias unit) — обеспечивают изгиб вала в заданной плоскости
Нижний направляющий подшипник (focal bearing) — поддерживает направление деформации вала и сохраняет траекторию долота
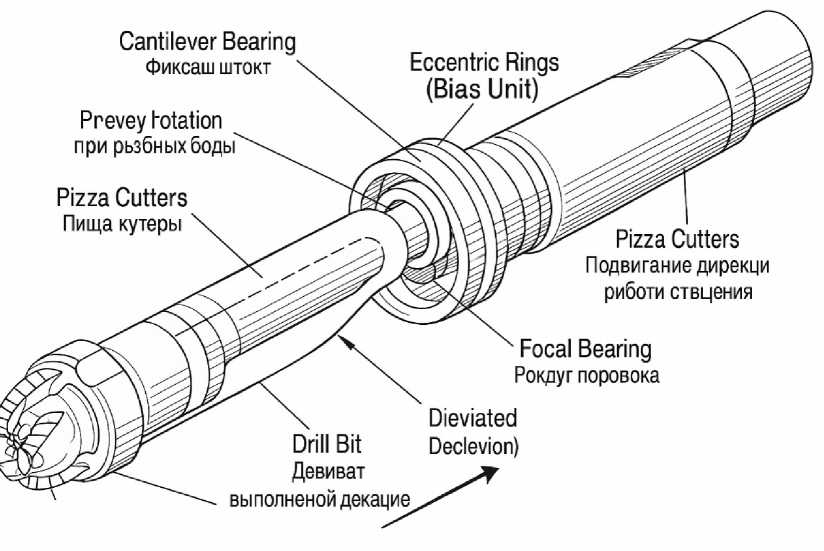
Pizza Cutters Пища кутеры
Eccentric Rings (Bias Unit)
Pizza Cutters Подвигание дирекци риботи ствцения
Cantilever Bearing
Фиксаш штокт '
Prevey dotation при рьзбныхбоды’
Focal Bearing
Рокдуг поровока
\ Dieviated
Drill Bit Declevion)
Девиват jf вы подменой декацие
Схематическое устройство Геопилота: 1 — гибкий вал; 2 — эксцентричные кольца (Bias Unit); 3 — консольный подшипник (Cantilever Bearing); 4 — направляющий подшипник (Focal Bearing);
5 — анти-ротационные ролики; 6 — долото; 7 — направление отклонения вала (Deflection).В совокупности эти элементы обеспечивают возможность регулирования степени отклонения вала (deflection) от нуля до максимального значения, точно ориентируя долото в нужном
Рис. 1
направлении
Контроль ориентации Геопилота осуществляется в реальном времени с помощью наддолотного инклинометра (At-Bit-Inclination, ABI). Электроника устройства постоянно отслеживает параметры ориентации — Toolface и Deflection — и при отклонении от заданных значений автоматически корректирует положение эксцентриков.
Для точного позиционирования каждого эксцентрика используется система обратной связи: на каждом кольце установлен датчик «нулевого положения» (home sensor) и два бинарных счётчика, аналогичных инкрементальным энкодерам, применяемым на буровых лебёдках. Такая система позволяет проводить самокалибровку положения эксцентриков в случае сбоя счётчиков.
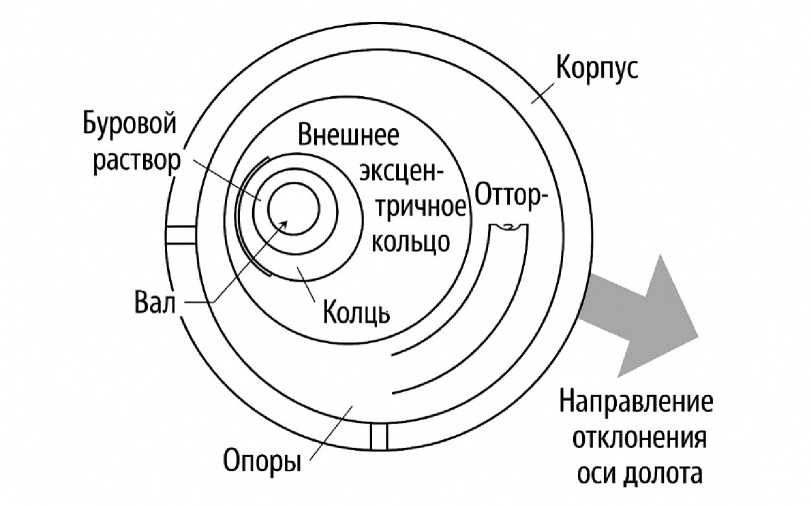
Рис. 3. Принцип действия системы эксцентриков Геопилота (Bias Unit): Поперечное сечение, показывающее относительное положение вала, внутреннего и внешнего эксцентричных колец, а также направление отклонения оси долота (Toolface) — противоположно смещению вала. Положение валов изменяется за счёт вращения эксцентриков внутри корпуса
Передача управляющих команд осуществляется с поверхности путём генерации негативных пульсаций с использованием устройства GeoSpan Оператор задаёт Геопилоту необходимые параметры ориентации долота (Toolface и Deflection) посредством специального протокола команд (Downlink), полный список которых приведён в эксплуатационной документации.
Таким образом, Геопилот функционирует аналогично забойному двигателю, однако обладает рядом существенных преимуществ. Он обеспечивает более высокую точность траекторного контроля и удобство в управлении, сохраняя при этом производственные преимущества роторного способа бурения по сравнению со слайдированием.
Заключение
В данной статье рассмотрено сравнение принципов направленного бурения с использованием винтового забойного двигателя (ВЗД) и геонавигационного устройства нового поколения — Геопилота. Несмотря на широкое распространение ВЗД и его известную технологическую надёжность, Геопилот демонстрирует значительные преимущества при работе в режиме роторного бурения. Благодаря системе эксцентричных колец, встроенным датчикам и высокой точности регулирования направления, Геопилот обеспечивает более точную и управляемую проводку скважины без необходимости перехода на слайдирование. Это особенно важно в условиях сложного профиля скважин, а также при бурении с высокой механической скоростью проходки. Автоматизация управления отклонением и высокая чувствительность к изменению траектории делают Геопилот более перспективным решением для современных буровых операций, где требуются высокая точность и производительность.
