Создание и применение виртуальной экспериментальной платформы для двигателя постоянного тока с независимым возбуждением на основе Simulink и Unity3D

Автор: Го Цихуй, Чжан Цзыхань, Холодилин И.Ю., Вэнь Чэньфэй
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электротехнические комплексы и системы
Статья в выпуске: 3 т.24, 2024 года.
Бесплатный доступ
Резюме: Simulink - это хорошо известное программное обеспечение для моделирования электрооборудования, широко используемое при изучении электрических машин. Однако оно ограничено в предоставлении результатов и не способно отобразить реальные эффекты движения физических двигателей. В данной работе разработана система математического моделирования в Simulink и система виртуального 3D-моделирования в Unity3D для двигателя постоянного тока с независимым возбуждением, основанная на концепции цифровых двойников. Ввиду сложности межсистемной передачи данных предлагается кроссплатформенный модульный метод взаимодействия данных на основе протокола связи UDP, модули связи могут независимо получать и отправлять данные, гарантируя плавное взаимодействие между ними. В ходе эксперимента по моделированию двигателя виртуальная экспериментальная платформа демонстрирует высокую скорость реакции и точность. Система виртуального 3D-моделирования может принимать входные данные из модели двигателя Simulink и получать результаты расчетов в реальном времени. Эти результаты затем загружаются в 3D-модель двигателя для визуализации соответствующих движений. Пользователи могут настраивать модели Simulink в соответствии со своими конкретными требованиями и использовать разработанную систему передачи данных для отображения соответствующих рабочих эффектов через виртуальную трехмерную систему. Виртуальная экспериментальная платформа использует 3D-модель для воспроизведения рабочего состояния двигателя и интуитивного трехмерного представления экспериментальных результатов. Это позволяет преодолеть ограничения по времени и доступному оборудованию.
Моторные приводы, цифровые двойники, simulink, человеко-компьютерное взаимодействие, моделирование движения
Короткий адрес: https://sciup.org/147246080
IDR: 147246080 | УДК: 62-83 | DOI: 10.14529/power240303
Establishing and simulating a virtual experimental platform for a separately excited dc motor based on Simulink and Unity3D
Simulink is well-established electrical simulation software widely used in teaching. However, it is limited to providing data and cannot depict the real motion effects of actual motors. To address this problem, this paper establishes a mathematical simulation system in Simulink and a 3D virtual simulation system in Unity3D for a separately excited DC motor based on a digital twin. In view of the complexity of inter-system data transmission, a cross-platform modular data interaction method based on the User Datagram Protocol (UDP) is proposed. Communication modules that can independently receive and send data are designed in different systems to ensure that the two systems interact smoothly. Through the motor simulation experiment, the virtual platform shows good real-time accuracy. The 3D virtual simulation system can input data to the Simulink motor model and receive calculation results from the model in real time. The platform loads these results into the 3D motor model to visualize the corresponding motion effects. Users can customize Simulink models to suit their specific requirements and use the data communication system to display the corresponding operating effects through the virtual 3D system. The platform utilizes the 3D model to reproduce the running state of the motor and to present the experimental results more intuitively and three-dimensionally. It overcomes the limitations of time and equipment.
Текст научной статьи Создание и применение виртуальной экспериментальной платформы для двигателя постоянного тока с независимым возбуждением на основе Simulink и Unity3D
В последние годы непрерывный прогресс и развитие науки и техники привели к тому, что технология виртуальной реальности оказалась в центре внимания [1]. Эта технология в первую очередь основана на технологиях компьютерной графики и поддерживается различными внешними устройствами управления дисплеем, что позволяет моделировать интерактивные и иммерсивные опыты виртуальной реальности на компьютерах и создавать динамические трехмерные сцены [2]. Двигатель постоянного тока является наиболее распространенным типом двигателя, используемым в системах электропривода. Он способен преобразовывать электрическую энергию в механическую, что позволяет генерировать кинетическую энергию для привода другого электрооборудования [3]. Традиционные экспериментальные методы обучения и исследований часто требуют значительного оборудования и ресурсов, а также сопряжены с рисками безопасности [4, 5]. Однако виртуальная лаборатория на базе Simulink и Unity3D позволяет моделировать и воспроизводить рабочие процессы двигателей постоянного тока в компьютерной среде, обеспечивая визуально увлекательную и интерактивную платформу обучения.
Для разработки платформы виртуального эксперимента с двигателем и использования технологии виртуальной реальности необходима поддержка компьютерного моделирования и программного обеспечения [6]. В этом контексте MATLAB и Unity3D играют важную роль. С помощью Simulink можно построить модель физического компонента в Simscape/MATLAB, которая включает модель двигателя и физические соединения, представляя физические элементы системы, вместо применения только общей передаточной функции [7, 8]. Unity3D как движок виртуальной реальности использует объектно-ориентированное программирование с использованием скриптов, что упрощает разработку виртуальных экспериментальных систем [9, 10].
В данной статье представлена разработка платформы виртуального цифрового двойника с использованием Simulink для двигателей постоянного тока с независимым возбуждением. Для визуализации рабочего состояния двигателя в реальном времени была создана система передачи данных с использованием протокола UDP. Данная система передает результаты расчетов, полученные путем математического моделирования в Simulink, в 3D-модель виртуальной эксперимен- тальной платформы и упаковывает их в модульную форму. Таким образом, платформа обеспечивает более интуитивное моделирование реальных характеристик двигателя. Интеграция этой виртуальной экспериментальной платформы с традиционными методами обучения позволяет снизить общие затраты на преподавание и при этом значительно повысить качество обучения в данной области.
Общая схема виртуальной экспериментальной платформы для двигателя постоянного тока
Схема предназначена для создания взаимосвязанной, эффективной, комплексной и открытой среды виртуальных экспериментов. Для достижения этой цели система состоит из трех основных компонентов: системы моделирования математических расчетов, системы передачи данных и системы виртуального 3D-моделирования. Математическая расчетная модель построена с использованием платформы Simulink, в частности, с использованием модуля DC Machine для расширения математической модели двигателя. Система пере- дачи данных создана с использованием протокола User Datagram Protocol (UDP). Она включает в себя порты приема и отправки данных как в математической расчетной модели, так и в виртуальной 3D-модели, обеспечивая двунаправленный обмен данными между моделями. Это означает, что каждая модель может как принимать, так и отправлять данные. В системе виртуального 3D-моделирова-ния двигатели постоянного тока и другие модели управления создаются с помощью Creo и 3D MAX. Для создания отдельных блоков модели используется игровой движок Unity3D, а для облегчения взаимодействия человека и компьютера и завершения построения системы виртуального 3D-моде-лирования разработан пользовательский интерфейс (UI). Основой всей виртуальной экспериментальной платформы является система моделирования математических расчетов, обеспечивающая точность результатов расчетов. С другой стороны, система виртуального 3D-моделирования выступает в качестве центра управления, отвечающего за взаимодействие человека и компьютера и передачу данных. Конкретная структура системы представлена на рис. 1.

MATLAB" ^ SIMULINK
Система отправки данных
UDP
Motor 3D model motion effect
Преобразование входных данных
Data observation
Data transmission system
Система получения : данных :
Input data conversion
Пользовательский интерфейс


| Initial data entry
Крутящий момент Напряжение арматуры
Field voltage
3D model

Calculati on results input interface
Mathematical model
Speed result input model
Calculation results
Results data conversion
Data receiving system
UDP
Data sending system
Data transmission system
Рис. 1. Блок-схема виртуальной экспериментальной платформы двигателя постоянного тока Fig. 1. Flow chart of the DC motor virtual experiment platform
Разработка и внедрение системы математического моделирования двигателя постоянного тока
В Simulink имеется встроенный модуль для моделирования двигателей постоянного тока, который требует ввода параметров во время выполнения, включая момент нагрузки, напряжение якоря и напряжение возбуждения [11]. В данной экспериментальной модели используется модель двигателя Simulink, конкретно, конфигурация двигателя постоянного тока с независимым возбуждением. В таблице приведены параметры двигателя.
В двигателе постоянного тока с независимым возбуждением обмотка якоря подключена непосредственно к источнику номинального напряжения. Во время пуска возникает высокий пусковой ток из-за низкого сопротивления обмотки якоря. Чтобы смягчить эту ситуацию, в данной модели используется метод реостатного пуска. Метод реостатного пуска использует трехуровневый резисторный пуск. С помощью формулы (1) рассчитывается номинальный ток двигателя, который составляет 16,2 А. Чтобы пусковой ток якоря не превышал номинальный ток в 3 раза (48,6 А), трехуровневые резисторы устанавливаются следующим образом: 3,66, 1,64 и 0,74 Ω. Время пуска устанавливается на 2, 4 и 6 s соответственно после запуска системы. В таблице приведен идеальный характер модели двигателя, где коэффициент вязкого трения ( Bm ) и момент кулоновского трения ( Tf )
установлены на 0. Чтобы вернуть двигатель в номинальное рабочее состояние, добавляется константа крутящего момента, которая может быть рассчитана как 0,2287 N·m·s/rad на основе данных двигателя, представленных в формулах (1)–(4) и таблице.
E0 = Un - In ■ Ra;(1)
Pe = E0 ■ In ;(2)
Te = PeN;(3)
BL = Te/w.(4)
Среди них E 0 – электродвижущая сила; Un – номинальное напряжение; In – номинальный ток; Ra – сопротивление якоря; Te – выходной крутящий момент; w – угловая скорость, rad/s; Pe – выходная мощность; BL – коэффициент связи (коэффициент индуктивности) или коэффициент связи потока между магнитным полем и током.
Согласно формуле (5), при заданных напряжении якоря и напряжении возбуждения можно рассчитать крутящий момент, создаваемый двигателем на различных скоростях:
TL = BL ■ w. (5)
Здесь TL – Torque Load, N·m.
Для торможения двигателя в данной модели используется метод динамического торможения. Внешний резистор 10 KΩ подключается к секции напряжения якоря. Когда сигнал торможения передается в модель двигателя через вход-
Параметры двигателя постоянного тока с независимым возбуждением Separately excited DC motor parameters
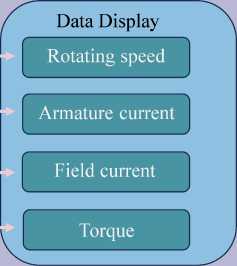
На рис. 2 представлена основная структура модели двигателя. Для работы двигателя необходимы входные параметры, такие как напряжение якоря, напряжение возбуждения и крутящий момент. Эти данные передаются в модель двигателя через модули ввода 1, 2 и 4. Результаты расчетов двигателя, включая скорость вращения, ток якоря, ток возбуждения и крутящий момент двигателя, загружаются в систему передачи данных через выходные модули 1, 2, 3 и 4.
На рис. 3 показана система передачи данных математической модели. В этой системе имитационная модель двигателя содержится в модуле обеспечения, а модуль управления позволяет инициировать имитацию двигателя. Кроме того, пользователи могут добавлять свои собственные модели двигателей в модуль в соответствии со своими требованиями.
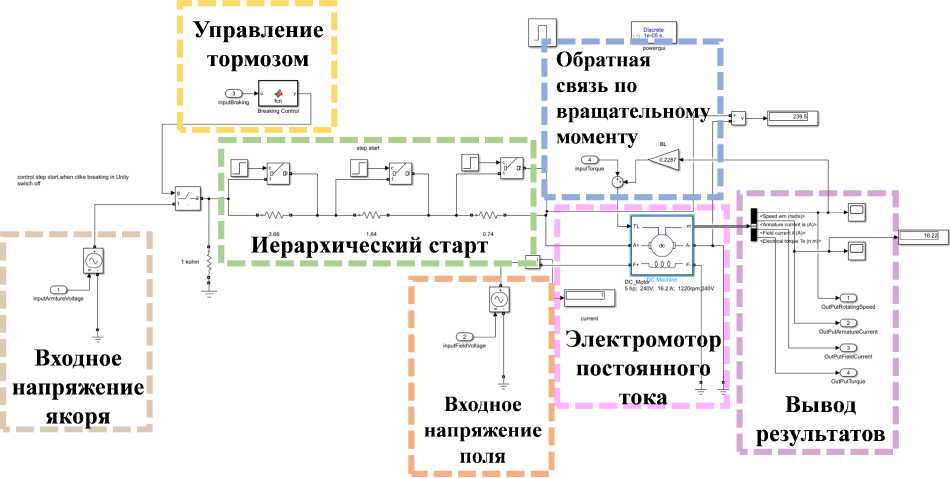
Рис. 2. Построение модели двигателя в Simulink
Fig. 2. Construction of the motor model in Simulink
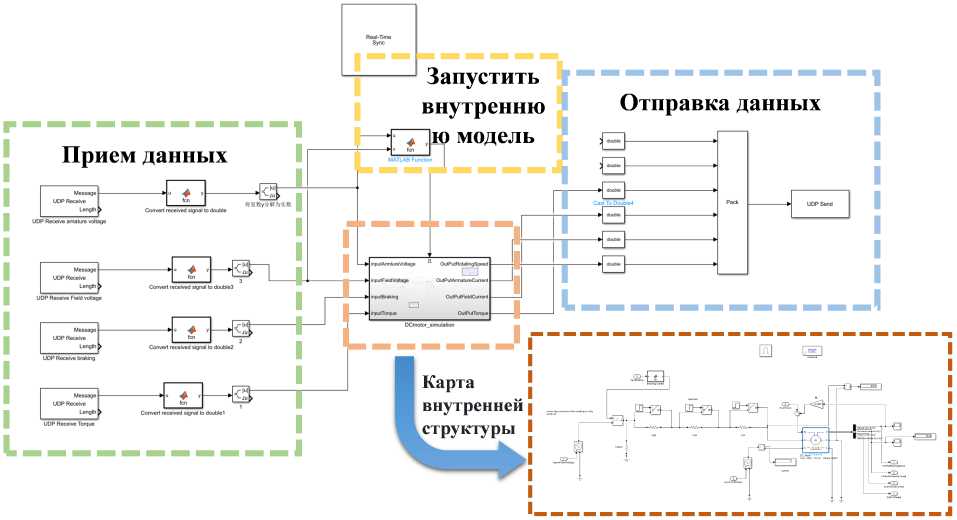
Рис. 3. Получение и отправка данных в системе передачи данных Simulink Fig. 3. Receiving and sending data in the Simulink data transmission system
М од ул ь получен ия данн ых и сп ол ь зу е т прото кол UDP дл я полу че н ия п а ра м е тров дв ига тел я и сигналов команд торможен ия от Uni ty, испол ьзу я определенные номера портов и IP- ад рес а . Однако, пос кол ьк у полу ченные данные пре дста в л ены в в иде м ас сив а байтов , он и н е м огу т б ы ть непос ред ств е н но обра бот а н ы двигат е л е м для в ыч ис л ен ий. Дл я ре ше ни я этой пробл е мы был ре а л из ов а н модуль п р ео б р азова н ия д а нн ых, к от о р ы й п р ео б р аз уе т вход ящ ий масс ив б а йт о в в з н ач е ни я с д войн о й т оч н о сть ю , к о т о р ы е з ат ем могут бы т ь и с п оль зо в ан ы в к ач естве в хо дн ых д анн ых дл я мо д е ли двиг ател я .
А на л ог ичн о в м од у л е отп ра в ки данны х р езультаты вычислений из модели д виг ател я д о лжны быть п реоб раз ов а ны в м а с сив ы ба й тов пе ре д пе р е да чей в м оде л ь Uni ty. Э т и ша ги пре обра з ов а ни я яв ляютс я в а жным и д л я неп ре рыв ной с в яз и м е жд у Simu l ink и U n i ty , обе спе ч ив а я точн у ю пе ред ач у данных по протоколу UDP.
Разработка и внедрение системы виртуального 3D-моделирования
П ос трое ние трех м е рной м о де ли с лу жи т ос но в ой для отобра ж е н ия и ф у нк цио на л ь нос ти в с е го в ирт у ал ь ного экс пе рим е н та . К а че с тв о м оде л и з н а ч и тел ь н о в л и яе т н а сл ожнос ть м оде л иров ани я окончательного отоб ра ж ени я вирт уал ь ного экс пе р и м ен та и с корос ть ра боты с ис те м ы [12]. При с оз да н ии м одел и не обх о дим о учи тыв а ть дв а ос нов ных а спе к та : пос трое н ие моде л и двига тел я пос т о янн ого тока и соз да н ие м оде л и л а бора торной с р е ды. Мод ел ь двигате л я пос т оянного тока с оз да е тся с ис пол ьз ов ание м програ м м ного обе с пе че ни я д л я трех м е рного м оде лиров а ни я, та кого ка к C re o и 3D MAX. После с оздан и я модел ь д виг а т ел я импор т ир у ется в U n ity . К роме того , в U ni ty с оздаю тся м о дели рабочей панели и от дельн ы х к но по к п о д к лючения, включая силовую ко л он ку дв и г а т е ля п о с т о я нного т о ка и к но п к у под к лючен и я рабочей п ан ели.
Перед импортом в папку Assets проекта Unity трехмерная модель двигателя постоянного тока, созданная в 3D MAX, должна быть преобразована в формат FBX. После импорта в Unity модель пе- ретаскивается на сцену и становится игровым объектом. На основе глобальных координат корректируются положение модели и применяются соответствующие материалы для улучшения визуального качества модели. На рис. 4 показана 3D-иллюстрация двигателя постоянного тока, созданная в 3D MAX.
Система виртуального 3D-моделирования двигателя постоянного тока основана в основном на движке разработки игр Unity3D [13]. Система моделирования включает в себя следующие функции.
-
1. Моделирование скорости вращения двигателя постоянного тока: система моделирования включает полученные данные о скорости в 3D-модель двигателя для точного имитирования его реального вращения.
-
2. Управление пользовательским интерфейсом: интерфейс пользовательского интерфейса позволяет пользователям вводить значения крутящего момента, напряжения якоря и напряжения возбуждения двигателя. Кроме того, предусмотрены кнопки для управления запуском и торможением двигателя. Интерфейс пользовательского интерфейса также обеспечивает оперативную обратную связь по операционным данным двигателя, облегчая контроль и запись.
-
3. Улучшенное человеко-компьютерное взаимодействие с помощью мыши: пользователи могут взаимодействовать с системой, используя кнопки рабочего стола и манипулируя перспективой экрана. Колесо прокрутки позволяет изменять масштаб интерактивного интерфейса.
-
4. Разборка и сборка механической конструкции двигателя постоянного тока: система позволяет управлять частями двигателя с помощью мыши и включает функцию адсорбции для фиксации деталей на месте. После завершения сборки система оценивает результаты и предоставляет оперативную обратную связь о правильности или неправильности сборки. Пользователи могут изучать внутреннюю и внешнюю структуру модели двигателя, используя мышь для поворота, масштабирования и просмотра модели.
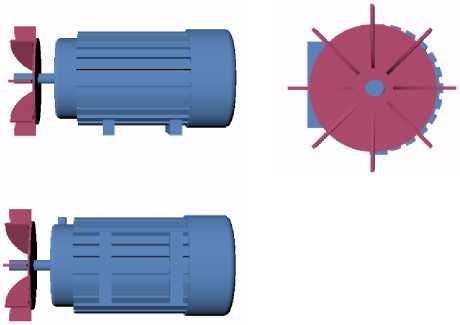
Рис. 4. Двигатель постоянного тока с рисунком 3D MAX Fig. 4. DC motor drawn by 3D MAX
Виртуальная система моделирования
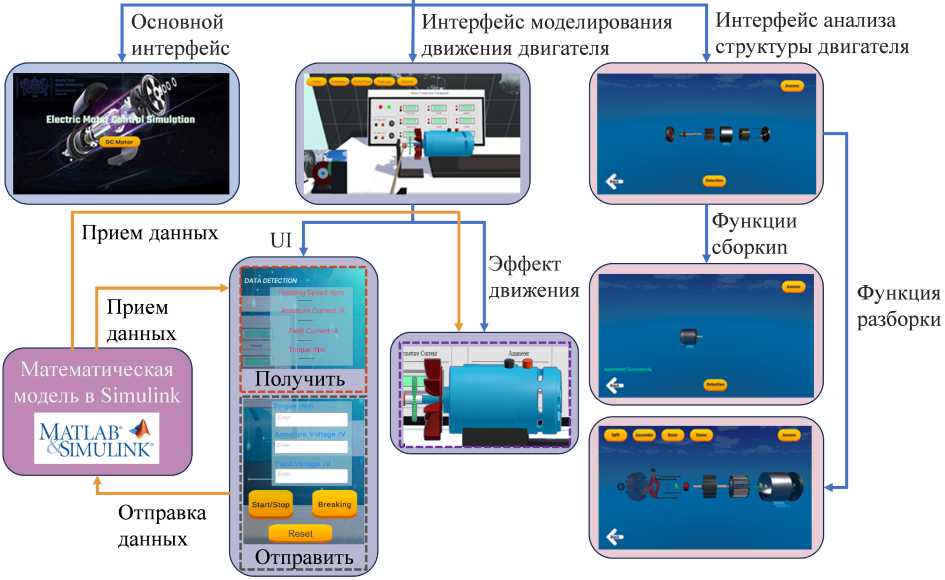
Рис. 5. Схема построения системы виртуального 3D-моделирования
Fig. 5. Flow chart of the virtual 3D simulation system construction
Для реализации вышеупомянутых функций общая концепция системы виртуального 3D -моде- лирования представлена на рис. 5. Система мод е лирования разделена на три интерфейса: инте рфейс главного меню, и нтерфейс моделирования движения двигателя постоянного тока и интерфейс анализа структуры двигателя постоянного тока. Интерфейс моделирования движения двигателя постоянного тока является основным функци о нальным интерфейсом системы моделирования, а управлен ие работой двигателя осуществляется в основном через интерфейс пользовательского интерфейса. Пользователи могут вводить исхо д ные данные двигателя через окно ввода пользов а тельского интерфейса, а кнопки управления управляют запуском, торможением и сбросом дви гателя. Во время работы двигателя данные о его работе в режиме реального времени отображаются на интерфейсе мониторинга данных, что облегчает наблюдение и анализ.
Unity – это платформа, которая использует язык C# для создания анимаций движения. При реал изации движения двигателя используется функция transform.Rotate для применения пол у ченной информации о скорости к модели двигат е ля. Однако, поскольку единица измерения скор о сти, рассчитанная в Simulink, является рад/с, ее необходимо преобразовать в обороты в минуту (RPM) в Unity.
В интерфейсе анализа структуры двигателя постоянного тока можно перемещать детали, сравнивая информацию о положении мыши и положении деталей двигателя. Правильные координаты положения каждой детали устанавливаются на шпинделе двигателя. По завершении сборки система проверяет соответствие текущих координат положения деталей целевым координатам для определения успешности установки.
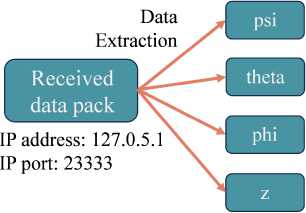
Для передачи данных в системе виртуального 3D-моделирования необходимо создать модули отправки и приема, использующие протокол UDP для связи. Для модуля приема данных IP-адрес и номер порта, заданные для его служебного порта, должны соответствовать IP-адресу и номеру порта отправителя в Simulink. После получения данных, отправленных из Simulink, принимающий модуль сортирует их. Взаимосвязь между данными в пакете показана на рис. 6. После завершения анализа каждое значение данных загружается в соответствующую модель и интерактивный интерфейс, инициируя следующий цикл. Модуль приема данных также должен быть сконфигурирован с тем же IP-адресом и номером порта, что и Simulink.
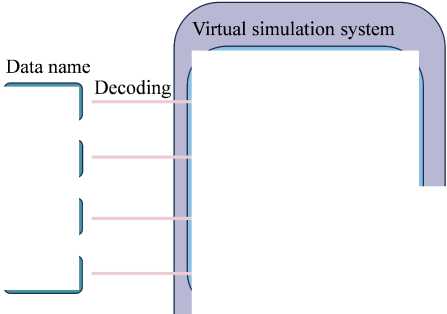
Поскольку входные данные в моделировании Simulink не требуют обновления в реальном времени без изменений, модуль отправки данных отличается от модуля приема. Каждый набор отправляемых данных соответствует опре-
Coding
IPaddress: 127.1.1.5
IP port: 15555
IP address: 127.0.0.5
IP port: 12341
IPaddress: 127.0.0.8
IP port: 12345
IPaddress: 127.0.2.5
IP port: 12333

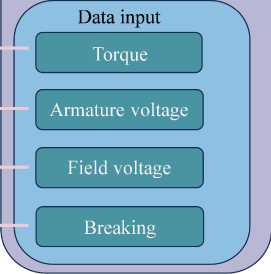
Рис. 6. Структура системы передачи данных в Unity3D
Fig. 6. The data transmission system structure in Unity3D деленной группе IP-адресов и номерам портов. Когда один набор входных данных изменяется и обновляется, неизменные данные остаются неизменными, что повышает стабильность системы передачи данных.
Результаты работы виртуальной экспериментальной платформы
На этой платформе проводится моделиров а ние работы двигателя постоянного тока с незав и симым возбуждением при номинальной мощности. В таблице приведены номинальные значения н апряжения якоря и напряжения возбуждения дв и гателя, установленные на уровне 240 V. Для н а блюдения за работой двигателя в режиме хол о стого хода момент нагрузки двигателя устано в лен на 0. Соответствующие данные поступают в пользовательский интерфейс системы виртуал ьного 3D-моделирования . Рис. 7 иллюстрирует у с пешную передачу данных в Simulink.
После завершения ввода исходных данных нажатие кнопки «Пуск» инициирует работу системы моделирования двигателя, которая начинает функционировать через 8,9 s. Рис. 8a, b представляет результаты моделирования скорости вращения двигателя постоянного тока и тока якоря в системе Simulink. Диаграмма скорости показывает пошаговое увеличение скорости двигателя постоянного тока благодаря иерархическому методу запуска. Точки перегиба в увеличении скорости происходят на 12, 14 и 16 s, что соответствует времени запуска, заданному в иерархической системе запуска. Через 16 секунд скорость стабилизируется на уровне 127,7 rad/s или 1219,7 RPM, что соответствует номинальной скорости в соответствии с заданными параметрами. Диаграмма напряжения якоря показывает, что ток якоря остается ниже 37 А во время процесса запуска, что меньше чем в три раза превышает номинальный ток 48,6 А и позволяет избежать значительных скачков тока. Через 16 s ток якоря стабилизируется на уровне 16,2 А что соответствует заданному номинальному току якоря. На рис. 8c–f показаны результаты работы двигателя в системе виртуального 3D-моде-лирования. Извлеченные состояния движения системы в моменты 10,4; 12,6; 14,4 и 17,6 s соответствуют иерархическому времени запуска. Поскольку единицей измерения скорости, отображаемой в системе трехмерного виртуального моделирования, является число оборотов в минуту, его необходимо преобразовать в rad/s, как показано на рис. 8. Изучая рабочие параметры двигателя в пользовательском интерфейсе, можно заметить, что скорость двигателя и напряжение якоря совпадают с результатами расчетов в системе Simulink в соответствующие моменты времени. Эффект движения виртуального 3D-двигателя соответствует результатам математического моделирования, что свидетельствует о точном обновлении в реальном времени рассчитанных данных, переданных из Simulink через систему передачи данных системы виртуального 3D-моделирования.
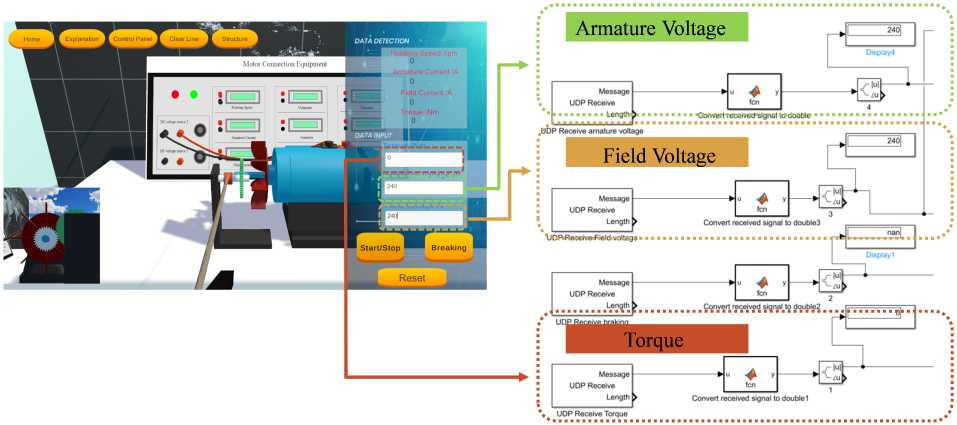
Рис. 7. Структурная схема передачи исходных данных двигателя постоянного тока Fig. 7. Diagram of the DC motor initial data transmission structure
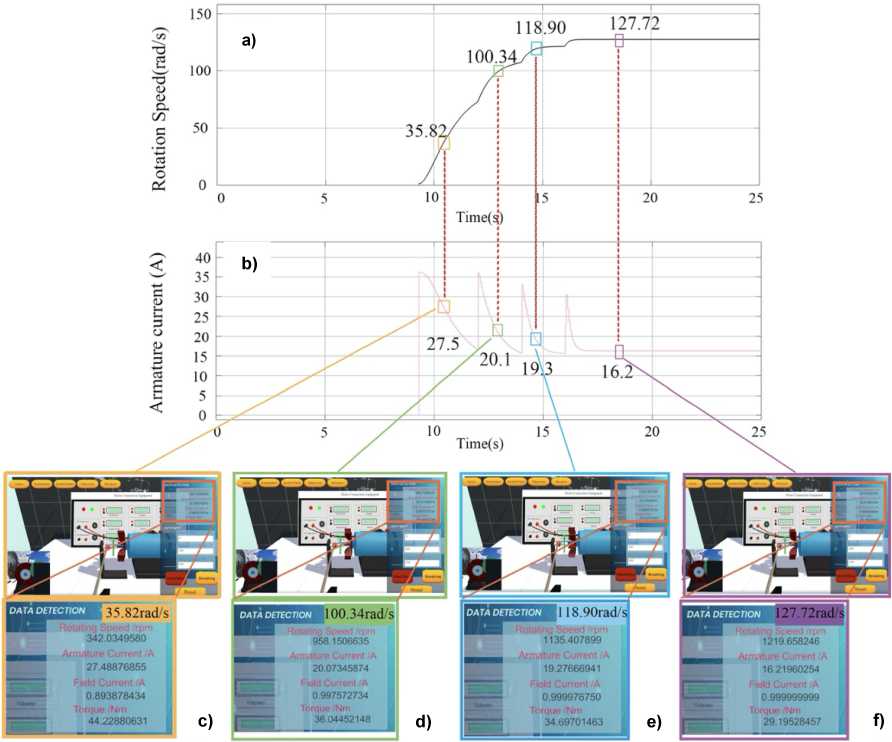
Рис. 8. Результаты моделирования стадии запуска двигателя постоянного тока: а – диаграмма скорости двигателя в моделировании Simulink; b – диаграмма тока якоря двигателя в моделировании Simulink; c – результат работы системы виртуального 3D-моделирования при 10,4 s; d – результаты работы системы виртуального 3D-модели-рования при 12,6 s; e – результаты работы системы виртуального 3D-моделирования при 14,4 s; f – результаты работы системы виртуального 3D-моделирования при 17,6 s
Fig. 8. Simulation results of DC motor starting stage: а – motor speed diagram in the Simulink simulation; b – motor armature current diagram in the Simulink simulation; c – result of the virtual 3D simulation system at 10.4 s; d – result of the virtual 3D simulation system at 12.6 s; e – result of the virtual 3D simulation system at 14.4 s; f – result of the virtual 3D simulation system at 17.6 s
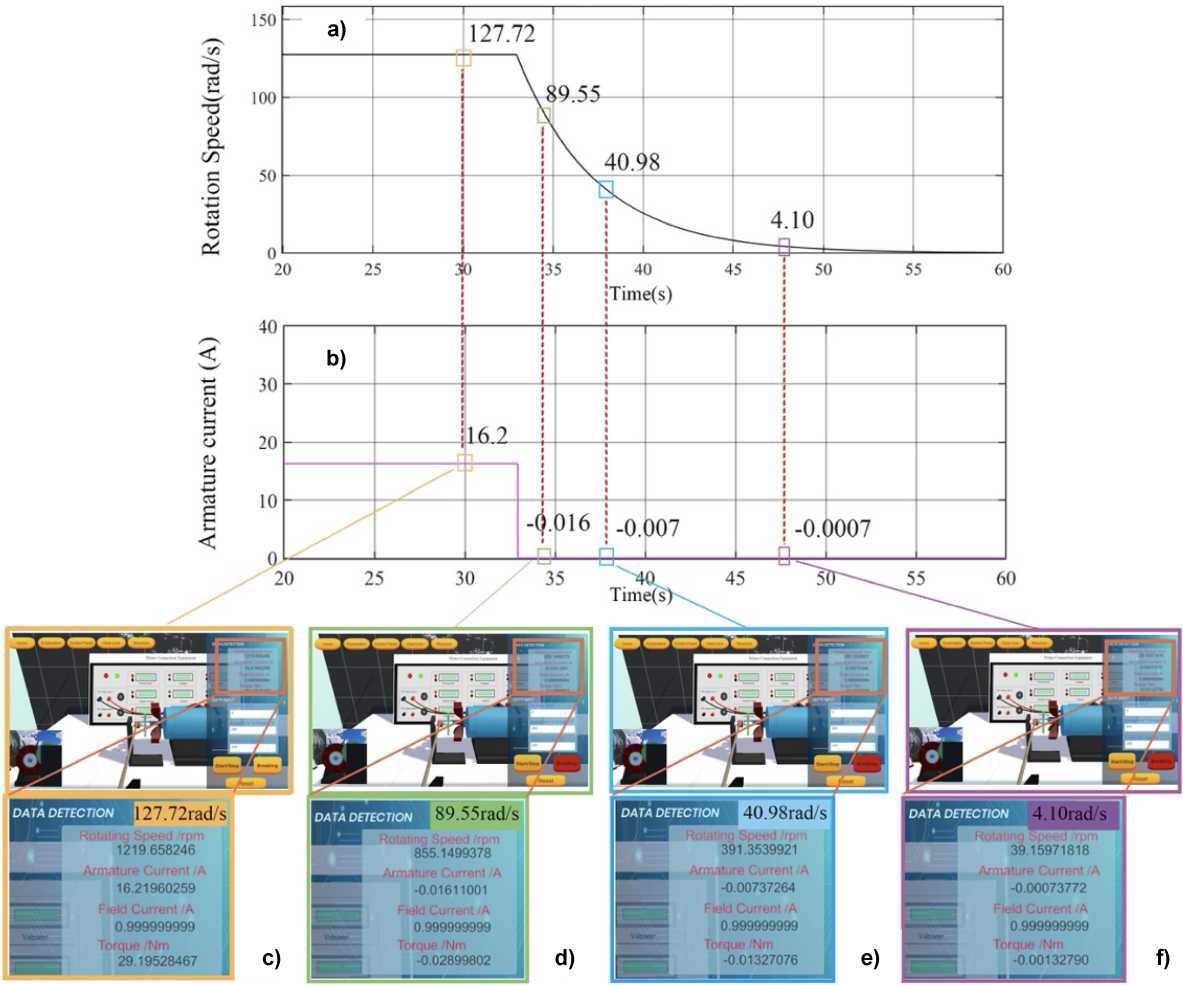
Рис. 9. Результаты моделирования стадии торможения двигателя постоянного тока: a – диаграмма скорости двигателя в моделировании Simulink; b – диаграмма тока якоря двигателя в моделировании Simulink; c – результат работы системы виртуального 3D-моделирования при 30 s; d – результаты работы системы виртуального 3D-модели-рования при 34,5 s; e – результаты работы системы виртуального 3D-моделирования при 37,9 s; f – результаты работы системы 3D виртуального моделирования при 47,9 s
Fig. 9. Simulation results of DC motor braking stage: a – motor speed diagram in the Simulink simulation; b – motor armature current diagram in the Simulink simulation; c – result of virtual 3D simulation system at 30 s; d – result of the virtual 3D simulation system at 34.5 s; e – result of the virtual 3D simulation system at 37.9 s; f – result of the virtual 3D simulation system at 47.9 s
Когда двигатель работает в течение 32,9 секунды, нажатие кнопки тормоза в системе виртуального 3D-моделирования посылает сигнал торможения в Simulink и отключает выключатель питания на конце якоря двигателя. Рис. 9a, b показывает результаты моделирования скорости и тока якоря двигателя постоянного тока после торможения в системе Simulink. Очевидно, что двигатель продолжает вращаться под воздействием собственной инерции, преобразуя кинетическую энергию в электрическую и генерируя обратный ток. В результате действия силы реакции скорость двигателя постепенно уменьшается и через 60 секунд достигает 0. Рис. 9c–f показывает состояние работы системы виртуального 3D-моделирования в определенные моменты времени моделирования: 30; 34,5; 37,9 и 47,9 s. В эти соответствующие моменты времени рабочее состояние виртуальной 3D-модели двигателя совпадает с результатами моделирования, полученными в Simulink, что позволяет успешно воссоздать 3D-эффект торможения двигателя.
Кроме того, в модуле анализа структуры двигателя пользователи имеют возможность собирать разобранные части двигателя. Взаимодействуя с платформой с помощью мыши, пользователи могут манипулировать и перемещать каждую деталь. После завершения сборки система может определить результат сборки и вывести на экран информацию о том, успешна ли она или возникли ошибки. Рис. 10a–c демонстрирует эффект работы этого модуля. Кроме того, модуль анализа структуры двигателя постоянного тока включает построение модели внутренней структуры двигателя. Пользователи могут регулировать угол обзора и скрывать ненужные детали. Рис. 10d, e иллюстрируют рабочий эффект этого модуля.
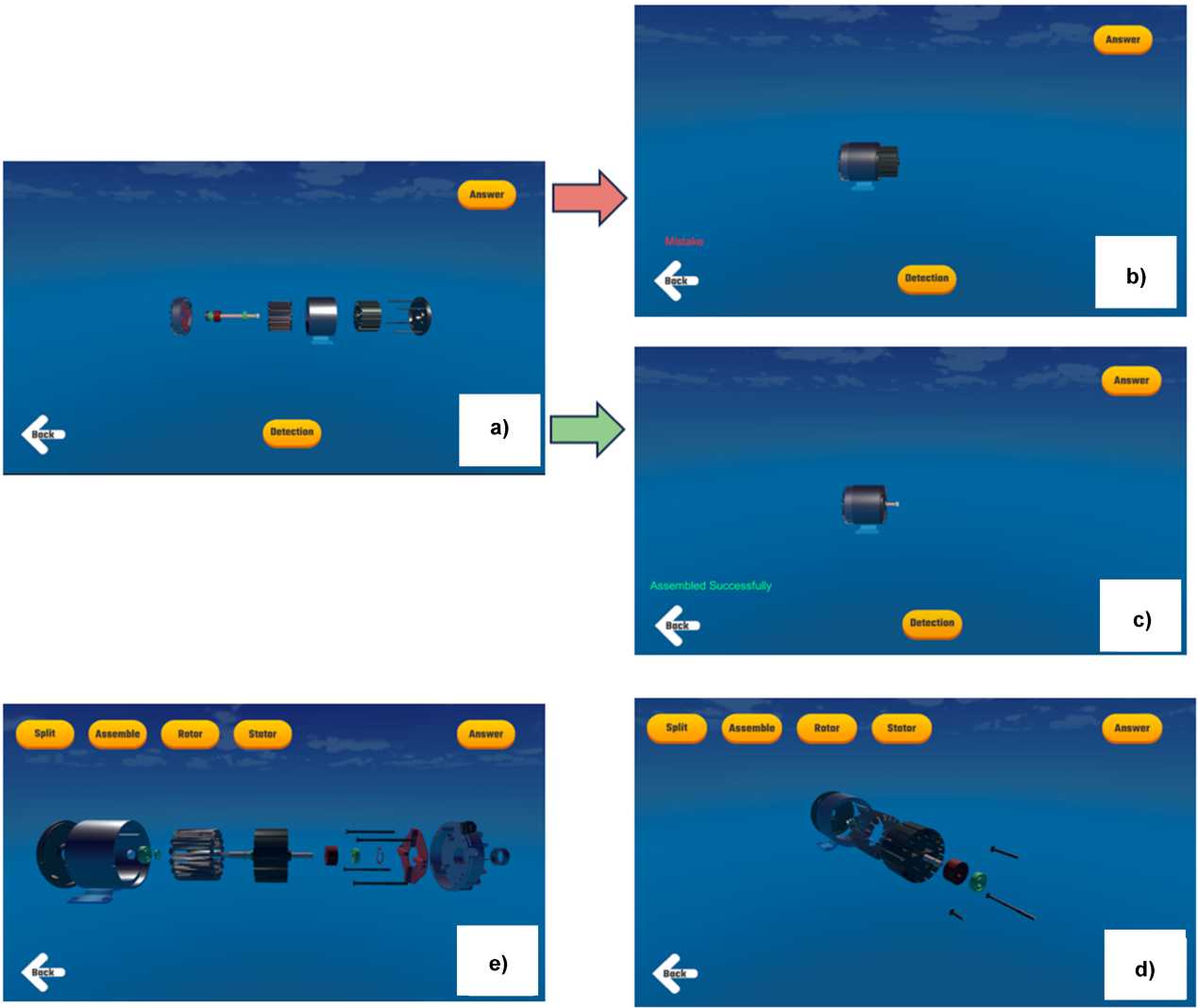
Рис. 10. Рабочий рендеринг модуля анализа структуры двигателя постоянного тока: a – интерфейс сборки двигателя постоянного тока; b – интерфейс ошибок сборки двигателя постоянного тока; c – интерфейс успешной сборки двигателя постоянного тока; d – угол обзора модели внутренней структуры двигателя постоянного тока 1; e – угол обзора модели внутренней структуры двигателя постоянного тока 2
Fig. 10. Operational rendering of the DC motor structure analysis module: a – DC motor assembly interface; b – DC motor assembly error interface; c – DC motor assembly successful interface; d – DC motor internal structure model viewing angle 1; e – DC motor internal structure model viewing angle 2
Заключение
С учетом концепции цифровых двойников в данной работе представлен комплекс методов построения виртуальной экспериментальной платформы для отдельно возбуждаемого двигателя постоянного тока на основе расчетов в Simulink. Этот подход включает создание системы математического моделирования двигателя постоянного тока с помощью Simulink, создание системы виртуального 3D-моделирования с помощью Unity3D и разработку системы передачи данных. По результатам исследования работы виртуальной экспериментальной платформы можно сделать следующие выводы.
-
1. Виртуальная экспериментальная платформа в данной работе основана на математической расчетной модели Simulink, что позволяет точно моделировать рабочее состояние двигателя. Simulink
-
2. В данной работе используется протокол связи UDP для создания системы передачи данных между математическими моделями и виртуальными 3D-моделями. Эта система позволяет имитировать прием и передачу данных между двумя системами моделирования и обеспечивает надежную скорость передачи данных. С помощью этой сис-
- темы передачи данных пользователи могут подключить свою собственную модель двигателя постоянного тока Simulink к виртуальной экспериментальной платформе и проводить имитационные эксперименты.
-
3. В рамках виртуальной экспериментальной платформы создан модуль анализа структуры двигателя постоянного тока, который позволяет пользователям самостоятельно соединять и собирать двигатель постоянного тока. После сборки система проверяет правильность результатов. В случае ошибок пользователи могут получить доступ к корректной трехмерной структурной модели двигателя постоянного тока, что позволяет получить
-
4. Платформа создана в виртуальной 3D-сре-де, что позволяет устранить зависимость от реального экспериментального оборудования и преодолеть ограничения времени и пространства. Такая гибкость позволяет использовать платформу в различных экспериментальных сценариях. Использование виртуальной экспериментальной платформы позволяет эффективно решать проблемы, связанные с ограниченным наличием оборудования и высоким риском, которые возникают при традиционном экспериментальном обучении.
является зрелым программным обеспечением для моделирования электрооборудования, широко используемым в электротехническом моделировании, и обеспечивает более точный источник данных для 3D-моделей. Система виртуального 3D-моделирования может преобразовывать математические данные в эффекты вращения двигателя, эффективно имитируя реальное движение двигателя. Такая интеграция двух компонентов повышает эффект 3D-рендеринга и точность данных платформы.
полное представление о внутренней и внешней структуре двигателя.
Список литературы Создание и применение виртуальной экспериментальной платформы для двигателя постоянного тока с независимым возбуждением на основе Simulink и Unity3D
- Князева Г.В. Виртуальная реальность и профессиональные технологии визуализации // Вестник Волжского университета имени В.Н. Татищева. 2010. № 15. С. 68-76.
- Кычкин А.В., Даденков Д.А., Билалов А.Б. Автоматизированная информационная система полунатурного моделирования статической нагрузки электроприводов // Вестник Пермского национального исследовательского политехнического университета. Электротехника, информационные технологии, системы управления. 2013. № 8. С. 73-83.
- Electric Machines Virtual Laboratory: Testing of DC Motor / R. Badarudin, D. Hariyanto, M. Ali, S. Meunmany // Journal of Physics: Conference Series. 2021. Vol. 2111, no. 1. P. 012041. DOI: 10.1088/17426596/2111/1/012041
- Фешин Б.Н., Ковальский А.А. Разработка виртуально-аппаратного стенда, имитирующего систему управления электроприводами насосных агрегатов // Труды университета. 2014. № 2. С. 106-109.
- Совершенствование лабораторного практикума обучения студентов по направлению подготовки «Электромеханика» / В.И. Бондаренко и др. // Электротехнические системы и комплексы. 2012. № 20. С. 412-437.
- A Virtual Laboratory of D.C. Motors for Learning Control Theory / J.J. Fuertes, M. Domínguez, M.A. Pra-da et al. // International Journal of Electrical Engineering & Education. 2013. Vol. 50 (2). P. 172-187. DOI: 10.7227/IJEEE.50.2.6
- From understanding a simple DC motor to developing an electric vehicle AI controller rapid prototype using MATLAB-Simulink, real-time simulation and complex thinking / P. Ponce et al. // Frontiers in Education. 2022. Vol. 7. P. 941972. DOI: 0.3389/feduc.2022.941972
- Даденков Д.А., Солодкий Е.М., Шачков А.М. Моделирование системы векторного управления асинхронным двигателем в пакете MATLAB/Simulink. Вестник Пермского национального исследовательского политехнического университета. Электротехника, информационные технологии, системы управления. 2014. № 11. С. 117-128.
- Li Junfeng, Wu Qinghui, Liu Jie. Design and development of "Motor Drag" virtual laboratory based on Unity3D // Foreign Electronic Measurement Technology. 2016. Vol. 35 (10). P. 87-90. DOI: 10.19652/j.cnki.femt.2016.10.019
- Huo J, Yue X. Retracted: Research and implementation of mechanical virtual experiment teaching platform // International Journal of Electrical Engineering & Education. 2023. Vol. 60 (1_suppl). P. 3895-3910. DOI: 10.1177/00207209211002077
- From understanding a simple DC motor to developing an electric vehicle AI controller rapid prototype using MATLAB-Simulink, real-time simulation and complex thinking / P. Ponce, R. Ramirez, M.S. Ramirez et al. // Frontiers in Education. 2022. Vol. 7. P. 941972. DOI: 10.3389/feduc.2022.941972
- Motion Simulation of Electric Tracked Vehicle Based on Virtual Reality Fusion / H. Du, Q. Jiang, Y. Ruan et al. // 2022 8th International Conference on Virtual Reality (ICVR). IEEE, 2022. P. 163-167.
- Digital twin of an electrical motor based on empirical performance model / A. Rassolkin, V. Rjabtsikov, T. Vaimann et al. // 2020 XI International Conference on Electrical Power Drive Systems (ICEPDS). IEEE, 2020. P. 1-4.
