Создание и развитие систем управления движением транспортных космических кораблей союз и прогресс: опыт эксплуатации, планируемая модернизация

Автор: Легостаев В.П., Микрин Е.А., Орловский И.В., Борисенко Ю.Н., Платонов В.Н., Евдокимов С.Н.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Обзоры
Статья в выпуске: 3 т.1, 2009 года.
Бесплатный доступ
Короткий адрес: https://sciup.org/142185607
IDR: 142185607
Текст обзорной статьи Создание и развитие систем управления движением транспортных космических кораблей союз и прогресс: опыт эксплуатации, планируемая модернизация
Существующая Международная космическая станция (МКС/ISS) создана для обширных научных международных исследований на низких орбитах вблизи Земли. МКС состоит из двух сегментов — российского (РС/RS) и американского (АС/USOS). Модули других международных партнёров интегрированы в эти два сегмента (рис. 1).
Рис. 1
Транспортировка экипажей на МКС осуществляется американскими космическими кораблями «Shuttle» и российскими кораблями «Союз».
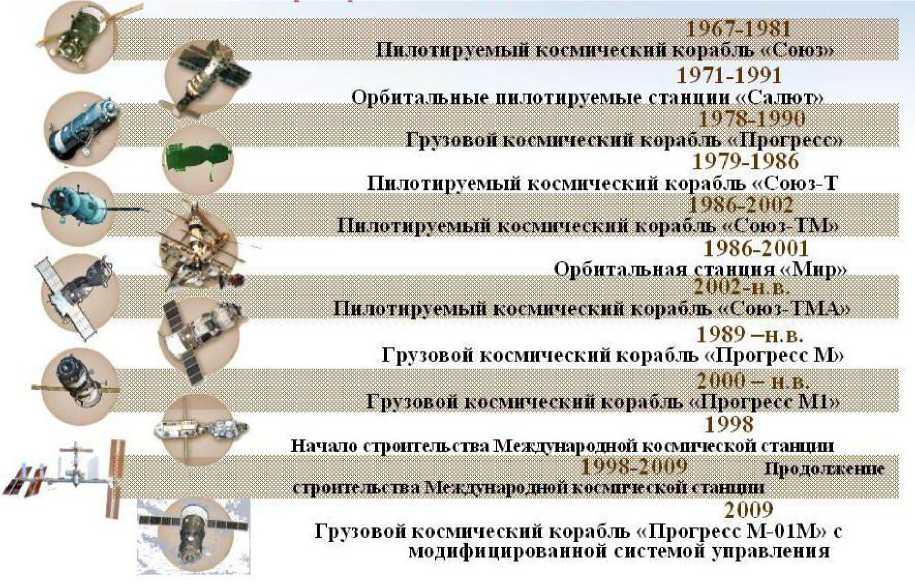
Транспортный корабль «Союз» эксплуатируется уже более 40 лет, продемонстрировав надёжную и безопасную доставку экипажей на космические станции. С тех пор системы кораблей «Союз» несколько раз модернизировались, каждый раз расширяя свои функциональные возможности, повышая свою надежность, безопасность и эффективность (рис. 2).
При этапных изменениях модифицировалось также и название корабля: «Союз», затем «Союз Т», «Союз ТМ», в настоящее время эксплуатируется «Союз ТМА».
Первые транспортные корабли «Союз» управлялись как в основном автоматическом, так и в резервном ручном контуре аналоговыми системами управления.
I. «Союз Т» и «Прогресс»
С 1979 года эксплуатировался корабль «Союз Т», система управления которого построена на основе бортового цифрового вычислительного комплекса (БЦВК) «Аргон-16». Была сменена также датчиковая аппаратура, заменена двигательная установка, модернизированы все системы. Алгоритмы БЦВК позволили организовать оптимальное управление ориентацией, маневрированием на орбите, автономным сближением и стыковкой со станция-
ТРУДЫ МФТИ. — 2009. — Том 1, № 3 ми. Был создан комплекс программ, занимающихся автоматическим распознаванием отказов и выходом из нештатных ситуаций.
Основным датчиком, измеряющим параметры относительного движения корабля и станции при выполнении сближения и стыковки с дальности 25 км, являлся бортовой нерезервированный радиолокатор «Игла» с ретранслятором на станции. («Игла» использовалась как на кораблях «Союз» и «Прогресс» с аналоговой системой управления, так и на корабле «Союз Т» с цифровой системой.)
При сближении и причаливании система управления станции по угловым измерениям ретрансляционной аппаратуры «Иглы», установленной на станции, подворачивала станционный стыковочный узел навстречу кораблю.
При необходимости, в нештатных ситуациях, завершающий участок сближения мог быть выполнен при ручном управлении космонавтами корабля.
Грузы на станцию доставлялись в основном грузовыми транспортными кораблями «Прогресс», система управления которых была идентична пилотируемому кораблю «Союз».
ООО
Грузовой космический корабль «Прогресс М1»
■ 1986-2002
Пилотируемый космический корабль «Союз-ТМ
1998-2 009 Продолжение строительства Международной кос метиской станщш
1979-1986
Пилотируемый космический корабль «Союз-Т
1986-2001
Опбитальцая станция «Мир» 2002-и. в.
Пилотируемый космический корабль «Союз-ТМА»
1967-1981
Пилотируемый космический корабль «Союз»
1971-1991
Орбитальные пилотируемые станции «Салют» ' 1978-1990
Грузовой космический корабль «Прогресс М-01М» с модифицированной системой управления
1989 -н.в.
Грузовой космический корабль «Прогресс М»
Начало строительства Международной космической станщш
Рис. 2. История создания транспортных кораблей «Союз» и «Прогресс» 1979 – 2009 годы
II. «Союз ТМ» и «Прогресс М»
Для полётов к крупногабаритной, тяжёлой станции «Мир» постоянного обитания была разработана модификация корабля «Союз ТМ». Одно из главных её отличий — установка на борт дублированного радиолокатора «Курс», обеспечивающего БЦВК измерительной информацией при сближении с дальности 200 км. Это позволило организовать оптимальное автономное управление сближением с даль- ности 600–800 км (до дальности 200 км управление осуществлялось по заложенной с Земли априорной информации об орбитах корабля и станции). При этом станция «Мир» осуществляла экономичную ориентацию в орбитальной или инерциальной системе координат (то есть без выполнения встречной ориентации стыковочным узлом на корабль).
С дальности 400 м осуществлялся облёт корабля к прогнозируемому положению нужного стыковочного узла станции (на «Мире» их было три, на МКС с конца 2009 года для российских кораблей будет четыре).
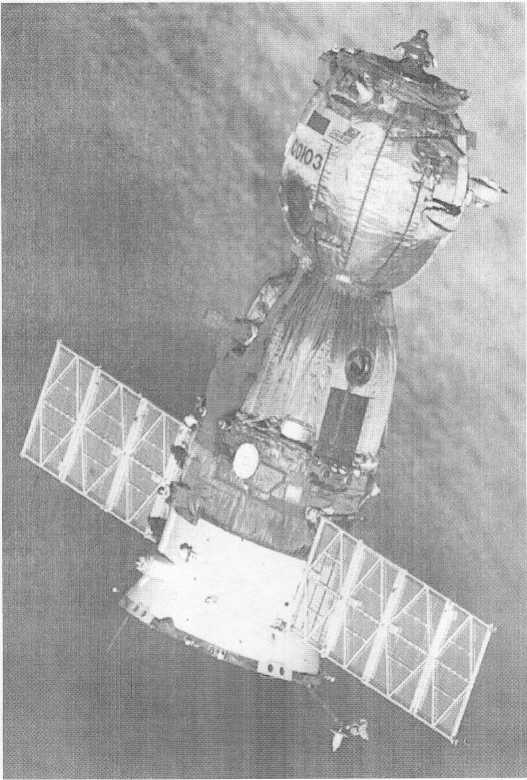
Рис. 3. «Союз ТМА»
В конусе стыковочного узла станции (с полураствором около 30 ° ) локатор «Курс» переключался в режим измерений, позволяющий алгоритмам управления БЦВК осуществить соприкосновение стыковочных узлов корабля и станции с точностью 0 , 1 - 0 , 15 м и относительной скоростью около 0 , 3 м / с.
Грузовые корабли «Прогресс» для полетов к станции «Мир» были заменены кораблями «Прогресс М» с цифровой системой управления, применявшейся в корабле «Союз ТМ». «Прогресс М» был также оборудован аппаратурой телеоператорно-го управления, которая позволяла экипажу станции при нештатных ситуациях осуществлять ручное управление движением грузовика со специального пульта, пользуясь изображением станции и её мишенью на телекамере грузовика, передаваемым на телеэкран станции.
III. «Союз ТМА» и «Прогресс M/M1»
Следующая модификация кораблей «Союз», получившая индекс «Союз ТМА», была разработана для обеспечения пилотируемых транспортных операций с МКС. На рис. 3 представлен внешний вид корабля.
Структурная схема системы управления движением (СУД) корабля представлена на рис. 4.
Аппаратура СУД рассредоточена по трём отсекам: спускаемому аппарату (СА), возвращаемому на Землю, приборноагрегатному (ПАО) и бытовому отсеку (БО). Заштрихованным отмечены доработанные по сравнению в «Союзом ТМ» приборы: шестиосный акселерометр БИЛУ, компьютер управления спуском КС020-М и оборудованный компьютерами пульт космонавтов «Нептун-МЭ» (рис. 5).
Программное обеспечение (ПО) КС020-М с использованием датчиков и аппаратуры спуска реализует путём разворотов спускаемого аппарата по крену управляемый спуск в атмосфере с наведением на заданный полигон Земли.
Максимальная перегрузка при номинальном спуске не превышает 4 g , точность посадки — не хуже 22 км ( 3 о ) относительно расчётной точки.
Основной режим управляемого спуска резервируется в порядке приоритета ручным управляемым спуском, автоматическим баллистическим спуском, резервным баллистическим спуском.
Баллистические спуски выполняются на резервный полигон с большей перегрузкой (до 8 , 5 g ) и с большими разбросами точки посадки (до 150 км).
Унифицированное ПО БЦВК «Аргон-16» кораблей «Союз ТМА» и «Прогресс M/M1», предназначенных для полётов к МКС, было также доработано с целью выполнения повышенных требований безопасности и надёжности выполнения их стыковок к МКС, а также снижения скорости стыковки до 0 , 15 - 0 , 20 м / с.
Предпринятые меры обеспечили выполнение стыковок к МКС всех направленных к ней российских кораблей «Союз» и «Прогресс», в том числе при возникавших нештатных ситуациях, что подтверждает правильность разработанных схем и алгоритмов обеспечения надежности и безопасности.
К марту 2009 года к МКС выполнено 61 стыковка российских кораблей (включая перестыковки «Союзов» и стыковку корабля «Прогресс», доставившего на МКС модуль СО-1).
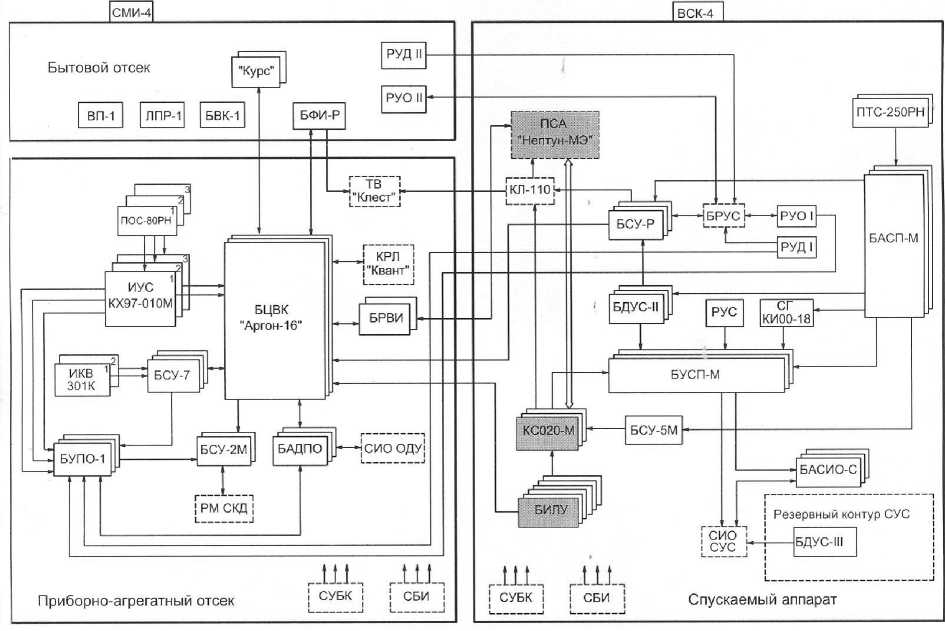
Рис. 4. Структурная схема системы управления движением (СУД) «Союз ТМА»
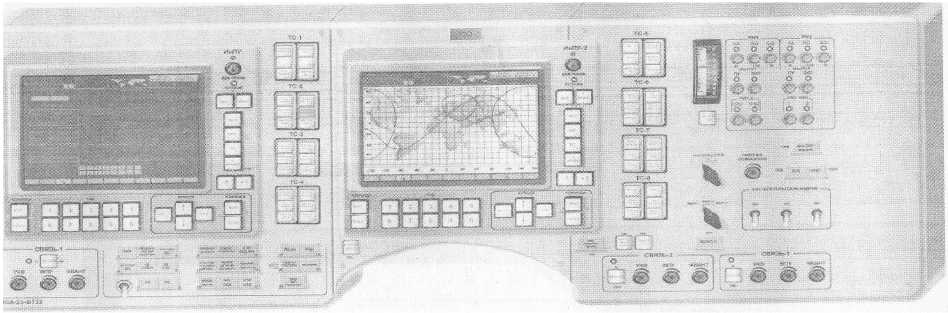
Рис. 5. Пульт космонавтов «Нептун-МЭ»
Статистика автоматических и ручных стыковок к МКС российских кораблей и нештатных ситуаций при их выполнении приведена в табл. 1.
Наиболее тяжелая нештатная ситуация сложилась при стыковке «Союза ТМА-5», когда при приближении к МКС произошел нерасчётный отказ одного из тормозных двигателей, что привело к значительному падению эффективности торможения. Тем не менее контрольные алгоритмы, не рассчитанные на подобный отказ, на дальности около 40 м выявили аномальность работы двигателей и остановили движение корабля на МКС. Экипажу была дана рекомендация выбрать другую пару тормозных двигателей и продолжить причаливание «Союза» к МКС при ручном управлении, что и было успешно реализовано.
Таблица 1
Статистика автоматических и ручных стыковок к МКС российских кораблей и нештатных ситуаций при их выполнении
|
Стыковки |
«Прогресс М», «Прогресс М1», «Прогресс» с СО-1 |
«Прогресс M-01M» |
«Союз ТМ» |
«Союз ТМА» |
Итого |
|
Полностью автоматические |
30 |
4 |
12 |
46 |
|
|
В том числе преодолённых нештатных ситуаций при автоматических стыковках |
1 |
1 |
2 |
4 |
|
|
Автоматическое сближение и плановое ручное причаливание |
1 (Переход на ТОРУ) |
1 |
|||
|
Автоматическое сближение и ручное управление причаливанием при нештатных ситуациях |
2 (Переход на ТОРУ) |
1 |
1 |
4 |
|
|
Ручные перестыковки |
4 |
7 |
11 |
||
|
Всего штатных стыковок и перестыковок |
30 |
7 |
17 |
54 |
|
|
Всего стыковок при нештатных ситуациях |
3 |
1 |
1 |
3 |
8 |
|
Всего стыковок с ручным управлением при причаливании |
3 |
1 |
4 |
8 |
16 |
|
ВСЕГО СТЫКОВОК |
33 |
8 |
20 |
61 |
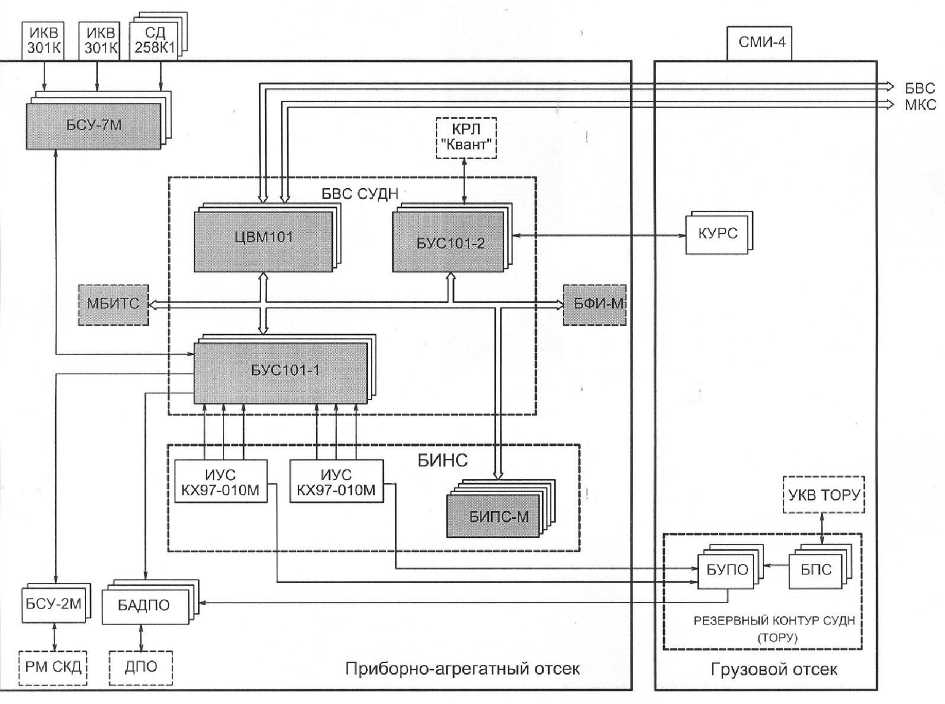
Рис. 6. Структурная схема модернизированной СУД корабля «Прогресс M-01M»
-
IV. «Союз ТМА» с модифицированной системой управления и «Прогресс M-01M»
В настоящее время проводится новый этап модернизации кораблей «Союз» и «Прогресс».
Эта модернизация отличается от предыдущих тем, что она связана не с текущей необходимостью её проведения (создание «Союза Т» был связано с необходимостью обеспечения полёта 3-х человек на корабле, «Союза ТМ» — обеспечение полётов к тяжёлой станции «Мир», «Союза ТМА» — обеспечение полётов к МКС).
Целью проходящей модернизации прежде всего является создание потенциала для перспективных российских транспортных кораблей. Структура новой системы управления, архитектура, возможности нового ПО, модульность его построения позволяют сравнительно легко адаптировать её к новым датчикам, к новым за- дачам, к принципиально другим конструкциям будущих кораблей.
В ноябре 2008 года состоялся первый полёт к МКС нового грузового корабля «Прогресс M-01M» с модернизированной системой управления, представленной на схеме рис. 6.
На схеме закрашены новые приборы.
Главным объектом модернизации стал новый цифровой вычислительный комплекс: устаревший «Аргон-16» сменила современная, постоянно работающая на орбите ЦВМ101 вместе с блоками согласующих устройств (БУС101-1 и БУС101-2).
ЦВМ101 — троированный, аппаратно мажорированный компьютер с процессором RISC 3081, что особенно важно для реализации сложных алгоритмов СУДН.
Случай двойного отказа БЦВК на участке причаливания резервируется (как и на «Прогрессе М») с использованием системы ТОРУ.
Кроме того, в системе управления одноосный троированный акселерометр заменен на пятиосный БИПС-М (оси расположены по конусу, что позволяет использовать прибор при одном и даже двух отка- зах, а также использовать измерительную информацию акселерометра по трём связанным осям корабля).
На борт установлена новая цифровая телеметрическая система МБИТС. Заменен блок формирования изображений (БФИ-М) на бортовом дисплее, передаваемый по телевизионному каналу в Центр управления полетом и на пульт экипажа МКС.
Модернизирован коммутационно-пре-образующий блок системы управления БСУ-7M.
Заново перекомплексировано программное обеспечение (ПО) системы управления.
Новое ПО прошло полный цикл моделирования режимов управления и отработки на стендах.
Замеренные на стендах ресурсы ЦВМ101, оставшиеся после реализации ПО «Прогресса M-01M», составляют около 60% по каждой позиции (память ПЗУ, ОЗУ, времени работы программ на такте), что подтверждает возможность дальнейшей модернизации СУДН на основе использования ЦВМ101 и её дальнейших модификаций. Разработанное ПО может быть также адаптировано для использования и на других современных бортовых ЦВМ.
Программы БИНС (бескарданной инерциальной навигационной системы) по информации датчиков угловых скоростей математически моделируют положение связанного базиса корабля относительно инерциальных (текущего и J2000), орбитального и других базисов.
Сейчас в качестве датчиков угловых скоростей используются поплавковые КХ 97 — 010 М. Их в ближайшей перспективе планируется заменить на волоконнооптические трёхосные измерители ТИУС, а затем на шестиосные (оси по гексаде) ИУС-М, позволяющие держать 2–3 отказа.
Начальная выставка базисов и последующая их коррекция осуществляется с помощью прибора ИКВ (инфракрасной вертикали Земли), измеряющего два угла рассогласования измерительной оси прибора с направлением на центр Земли.
ПО ЦВМ101 позволяет вместо ИКВ использовать для той же цели аппаратуру спутниковой навигации АСН (планируется установить на российские корабли в ближайшей перспективе), а при необходимости использовать и высокоточные звёздные датчики.
Основным датчиком при автономном сближении сейчас является уникальный радиолокатор «Курс», дающий измерения с дальности 200 км практически в полной сфере вокруг станции МКС.
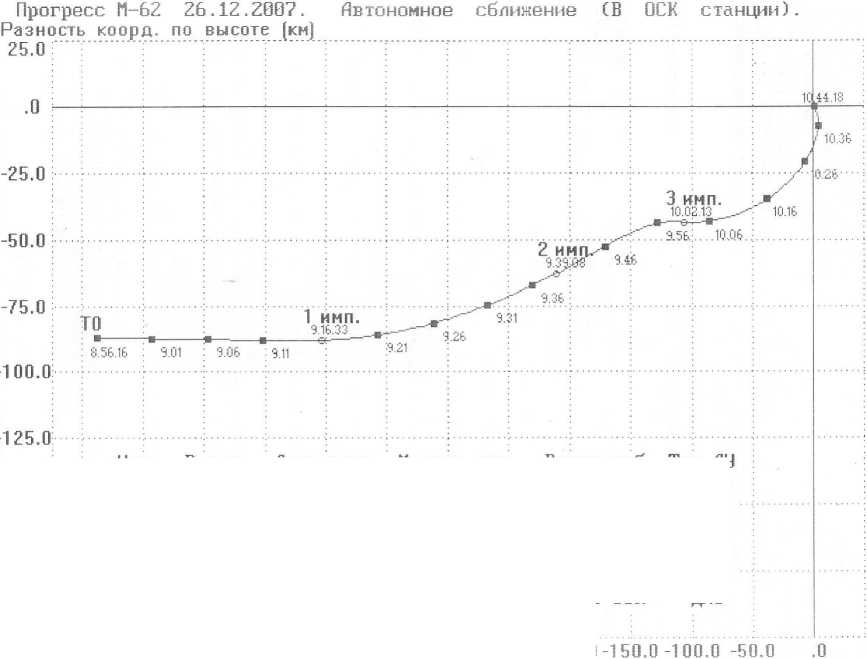
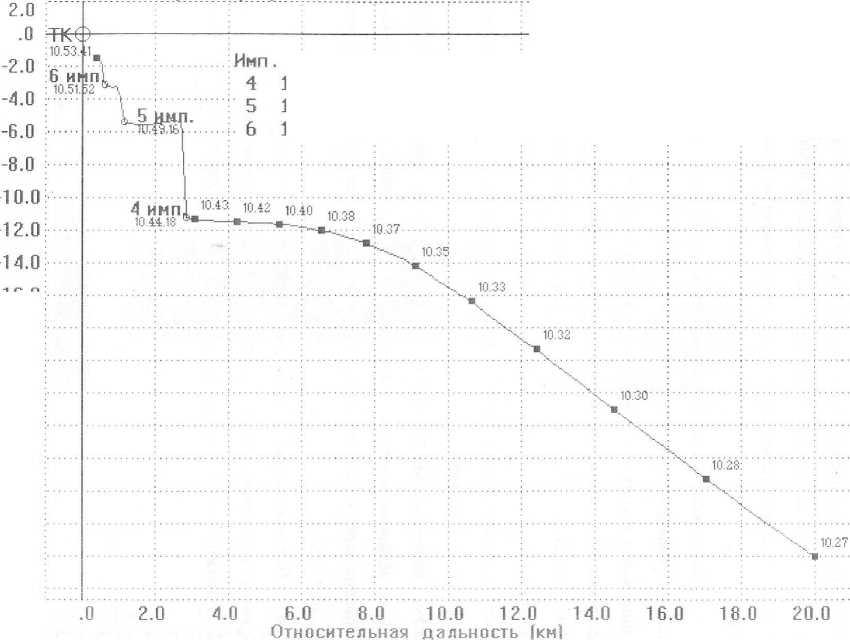
В соответствии с его возможностями построены схемы автономного сближения кораблей «Прогресс» и «Союз». На рис. 7–10 проиллюстрировано выполнение движения полёта корабля по этим схемам. На рис. 7 и 8 в качестве примера приведены траектории движения полёта корабля «Прогресс М-52» (движение в плоскости орбиты станции с дальности 600 км и вблизи МКС). На рис. 9 и 10 — относительное движение в фазовой плоскости р,р с дальности 600 км и на дальностях ближе 20 км.
В ближайшее время планируется дополнить при сближении использование аппаратуры «Курс» измерениями аппаратуры АСН.
В перспективе рассматривается замена радиолокатора сближения «Курс» на использование на дальнем участке сближения АСН на корабле, АСН на станции и МБРЛ (межбортовая радиолиния), а на ближнем участке — оптическим локатором и/или видеометром.
Рассматривается также использование на ближнем участке аппаратуры «Курс ММ», работающей в миллиметровом радиодиапазоне. Выбор новой аппаратуры сближения будет сделан на основе анализа её технологичности, эффективности, надёжности, соотношения «цена/качество».
В соответствии с ограничениями новой аппаратуры по дальности действия и конусом работы вокруг стыковочных узлов МКС или других станций будут доработаны также алгоритмы сближения и причаливания.
В настоящее время в РКК «Энергия» форсируются работы по внедрению ЦВМ101 в систему управления «Союза ТМА» новой серии.
Блок-схема СУД этого корабля приведена на рис. 11.
На схеме заштрихованы новые или модернизированные приборы: СУ по отношению к СУ существующего «Союза ТМА».
-150.0
-175.0
Имп.
■ 2
|
Время |
Дальность |
Модуль имп. |
Время раб. |
Тип ДУ |
|
9.16.33 |
415.17 км |
12.65 м/с |
35.0 сек |
скд |
|
9.39.В8 |
221.21 км |
1.14 м/с |
28.6 сек |
ДПО |
|
10.02.13 |
114.86 км |
25.94 м/с |
66.2 сек |
скд |
|
10.44.18 |
2.84 км |
7.11 м/с |
21.4 сек |
СКД |
|
10.49.16 |
1.16 км |
4.95 м/с |
58.4 сек |
ДПО |
|
10.51.52 |
.60 км |
2.41 м/с |
33.4 сек |
ДПО |
-200.0 - .......;..........:..............-..........: : ■ -;............
-600.0 -550.0 -500-0 -450.0 -400.0 -350.0 -300.0 -250.0 -200.0 Разность коорд. вдоль орбиты |км]
Рис. 7
Прогресс М-62 26.12.2007. Автономное сближение (В ОСК станции). Разность коорд. по высоте (км]
-1.0
-2.0
-3.0
-4.0
-5.0
___fi ИМП
10.51.52
0.53.41
тк
5-
-ftMflr .49.16
4 имп.
.10.44,18...
104;
10.41
'^10.40
Имп. Время
10.44.18
10.49.16
10.51.52
Дальность
2.84 км
1.16 км . 60 КМ
Модуль имп.
7.11 м/с
4.95 м/с
2.41 м/с
Время раб. 21.4 сек 58.4 сек 33.4 сек
Тип ДУ СКД ДПО ДПО
4 ю.:
.0 1.0 2.0 3.0 4.0
Разность коорд. вдоль орбиты [км]
Прогресс М-62 26.12.2007. Автономное сблинение (Фазовая
Относительная скорость (м/с]
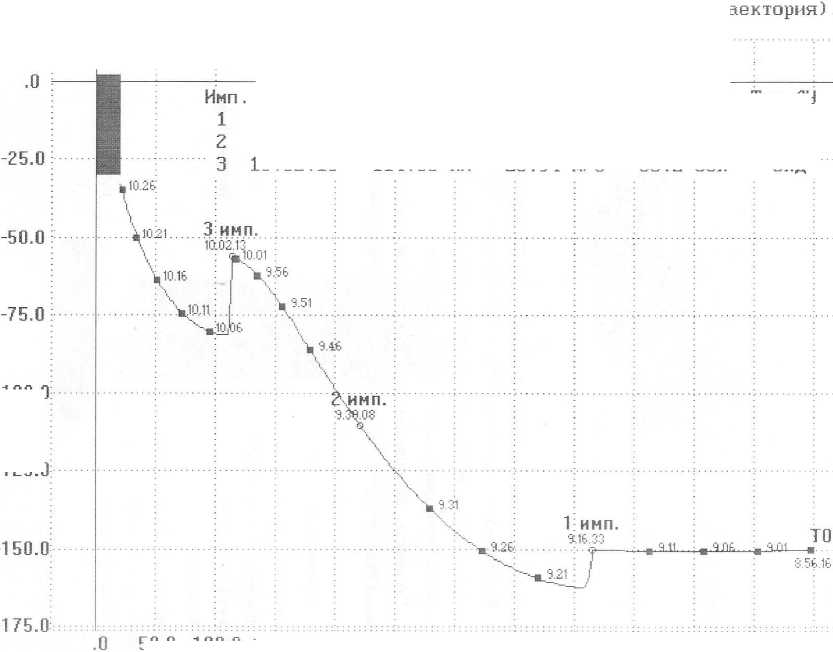
Рис. 9
50.0 100.0 150.0 200.0 250.0 300.0 350.0 400.0 450.0 500.0 550.0 600.0 Относительная дальность [км]
|
Время |
Дальность |
Модуль имп. |
Время раб. |
Тип ДУ |
|
9.16.33 |
415.17 км |
12.65 м/с |
35.0 сек |
скд |
|
9.39.08 |
221.21 км |
1.14 м/с |
28.6 сек |
ДПО |
|
10.02.13 |
114.86 км |
25.94 м/с |
66.2 сек |
СКД |
-100.0
-125.0
Прогресс М-62 26.12.2007. Автономное сближение (Фазовая траектория). Относительная скорость ' ’ ’
-16.0
-18.0
-20.0
-22.0
-24.0
-26.0
-28.0
-30.0
-32.0
-34.0
|
Время |
Дальность |
Нодуль имп. |
Время раб. |
Тип ДУ |
|
10.44.18 |
2.84 км |
7.11 м/с |
21.4 сек |
СКД : |
|
18.49.16 |
1.16 км |
4.95 м/с |
58.4 сек |
ДПО : |
|
10.51.52 |
,60 км |
2.41 м/с |
33.4 сек |
ДПО : |
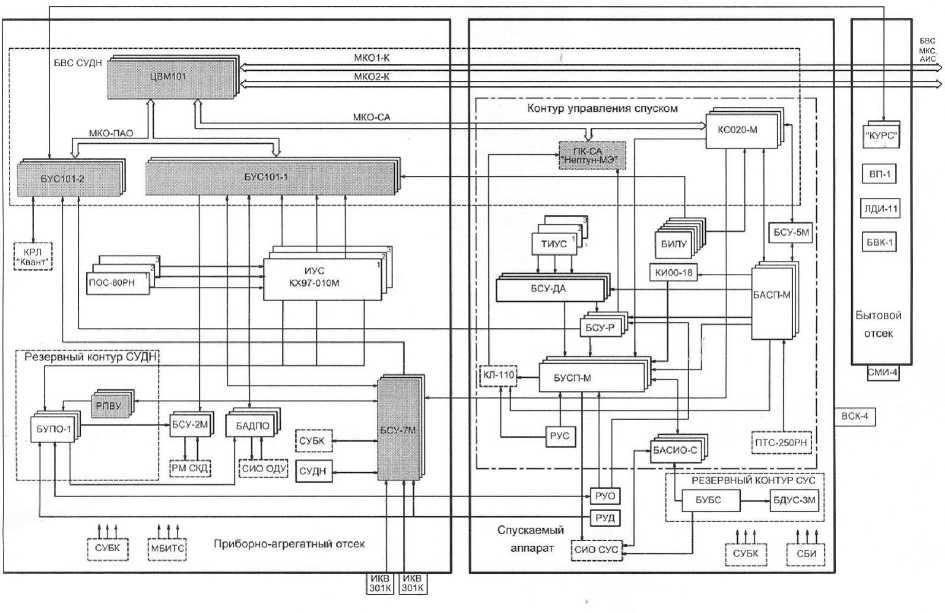
Рис. 11. Структурная схема модернизированной СУД транспортного корабля «Союз ТМА»
Как и на «Прогрессе M-01M», главный модернизируемый прибор — это БЦВМ ЦВМ101 с новым программным обеспечением. Ядром ПО ЦВМ101 модернизированного корабля «Союз» является ПО «Прогресс M-01M».
На новый «Союз» также планируется установить модернизированный пульт космонавтов «Нептун» с более современными вычислительными средствами и средствами отображения информации.
Новый пульт пройдёт испытания в составе корабля «Союз ТМА-15», полет которого состоится в мае 2009 года.
Все компьютеры «Союз ТМА» с модифицированной системой управления (ЦВМ101, КС020, компьютеры пульта) объединяются в единую вычислительную сеть — БЦВК. БЦВК интегрируется в бортовую вычислительную систему МКС после стыковки «Союза» к станции. Это позволит оперативно изменять в БЦВК «Союза» навигационную информацию в случае необходимости выполнения срочного спуска «Союза» с экипажем на Землю, что также удобно и для выполнения штатного спуска корабля.
V. Выводы
В ноябре 2008 года выполнен полёт корабля «Прогресс M-01M», готовится к полету второй грузовой корабль «Прогресс M-02M» с модернизированной системой управления, построенной на базе современного компьютера ЦВМ101.
На основе использования ЦВМ101 в РКК «Энергия» проводится также модернизация системы управления пилотируемого корабля «Союз ТМА».
Архитектура модернизированной системы управления кораблей «Прогресс M-01M» и модернизированного корабля «Союз ТМА», архитектура разработанного ПО пульта космонавтов «Нептун МЭ» и модернизированного ПО компьютера управления спуском КС020-М (корабля «Союз ТМА») закладывают основу для дальнейшей модернизации пилотируемых и грузовых российских кораблей, для модернизации и смены аппаратуры СУДН и использования её на будущих российских кораблях.
