Способ герметичного соединения пилотируемого лунохода и напланетного модуля

Автор: Чернышев Иван Евгеньевич, Рассказов Ярослав Владимирович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Проектирование, конструкция и производство летательных аппаратов
Статья в выпуске: 3 (38), 2022 года.
Бесплатный доступ
В статье рассмотрены различные способы решения новой задачи - устранения рассогласования стыковочных интерфейсов пилотируемого герметичного лунохода и лунного модуля для создания их герметичного соединения. Проведено сравнение способов, выбрано использование в конструкции лунохода 6-степенной платформы, управляемой по контактным силам стыковочных интерфейсов. Разработаны макеты лунохода и станции, осуществляющих соединение интерфейсов выбранным способом. Представлены результаты их испытаний. Приведены описание конструкции макетов; циклограмма управления луноходом; алгоритм автоматической (роботизированной) стыковки; состав датчиковой аппаратуры; состав программного обеспечения. Рассмотрен проект стыковочного агрегата лунохода, отличающегося отсутствием в его составе стыковочного механизма. Сделан вывод о том, что предлагаемый способ устранения рассогласования стыковочных интерфейсов принципиально реализуем и работоспособен.
Луноход, лунная база, герметичное соединение, стыковка, робототехническое устройство, автоматическое управление, силомоментное управление, макетирование
Короткий адрес: https://sciup.org/143179479
IDR: 143179479 | УДК: 629.787:523.34
A method for establishing an air-tight mating between a manned lunar rover and a module on the planetary surface
The paper addresses various solutions to the new problem of eliminating the misalignment of mating interfaces between a manned pressurized lunar rover and a lunar habitat in order to establish their air-tight connection. A comparison of methods was performed and the 6-DOF platform was selected for use in the lunar rover design, to be controlled by contact forces in the mating interfaces. Mockups were built for the lunar rover and the habitat that can establish the link up of the interfaces using the selected method. The paper presents the results of their testing. It provides a description of the mockup design; the lunar rover control timeline; algorithm for automatic (robotic) mating; the sensor equipment list; the software list. It discusses a design of the lunar rover docking assembly that is characterized by not having a docking mechanism within it. The paper arrives at the conclusion that the proposed method for eliminating the misalignment of the docking interfaces is theoretically feasible and operable.
Текст научной статьи Способ герметичного соединения пилотируемого лунохода и напланетного модуля
В настоящее время в РКК «Энергия» рассматривается возможность реализации Российской обитаемой лунной базы [1]. В составе базы предусмотрено применение пилотируемого герметичного лунохода (ПГЛ) для перемещения космонавтов по поверхности Луны. Для уменьшения количества выходов космонавтов на её поверхность ставится задача создания герметичного перехода (ГП) между луноходом и напланетной станцией. Зарубежными компаниями проводятся исследования в этой области [2–4], но сведения о том, что такая задача решена, отсутствуют.
Для создания ГП необходимы:
-
• механическое устройство для обжатия герметизирующих уплотнений стыков, подобное описанному в работе [5];
-
• устройство, способное устранить рассогласование между этими стыками при наличии силы тяжести.
При орбитальной стыковке, происходящей в условиях невесомости, устранение рассогласований выполняется только за счёт интерфейсных сил и моментов, возникающих при взаимодействии стыковочных агрегатов. Если применять данный подход на поверхности Луны, то вес лунохода существенно увеличит нагрузку на стыковочные интерфейсы. В этом случае прочность конструкции, силы и моменты, развиваемые приводами системы стыковки, должны быть значительно увеличены. Соответственно, возрастёт и масса конструкционных элементов. В настоящей работе выполнен краткий обзор способов устранения рассогласования, в которых вес лунохода незначительно или вовсе не влияет на нагрузки, воздействующие на стыковочные интерфейсы. Проведено сравнение этих способов, и выбран наиболее перспективный, в котором применена 6-сте-пенная платформа (в данном случае выбрана платформа Гью [6]), управляемая по контактным силам стыковочных интерфейсов.
Для подтверждения возможности соединения объектов выбранным способом разработан макет дистанционно управляемого лунохода, имеющего возможность стыковаться с макетом на-планетного модуля. В работе приведены описание конструкции макетов; циклограмма управления луноходом; алгоритм автоматической (роботизированной) стыковки; состав датчиковой аппаратуры; состав программного обеспечения (ПО). Рассмотрен проект соответствующего стыковочного агрегата лунохода, отличающегося отсутствием в его составе стыковочного механизма.
Результатом работы является подтверждение (с помощью макетирования) работоспособности выбранного способа устранения рассогласования стыковочных интерфейсов для создания ГП между объектами на поверхности небесного тела.
1. описание задачи и классификация способов её решения
Пилотируемый герметичный луноход представляет собой колёсное транспортное средство длиной ~5 м и массой три-пять и более тонн, в состав которого входит герметичная кабина, а также стыковочный интерфейс. Водитель этого колёсного транспортного средства может привести его в заданную точку с погрешностью, определяемой возможностями человека и техники. Неоднократное движение по поверхности меняет её рельеф. В настоящее время предполагается, что космонавт безопасно для объектов приводит стыковочный интерфейс колёсного лунохода в область с габаритами 30x30 см с угловой погрешностью до 5°, а также с зазором ~10 см. Для создания соединения посредством существующего механического устройства для обжатия герметизирующих уплотнений требуется совмещение стыковочных плоскостей с линейной погрешностью не более 0,5 мм и угловой — ~0,2°. Поэтому колёсного шасси недостаточно для того, чтобы совместить интерфейсы с погрешностью, приемлемой для создания ГП.
После окончания колёсного движения необходимо предусмотреть работу некоторого устройства, которое устранит рассогласование и позволит совместить стыковочные плоскости настолько точно, чтобы могли сработать крюки механизма герметизации стыка, аналогичные используемым на космических кораблях [7]. Один из вариантов классификации таких устройств приведён на рис. 1.
Устройства в представленной классификации разбиты на две группы. В первой группе стыковочный интерфейс закреплён на луноходе жёстко, и устройство перемещает герметичную кабину или весь луноход. Во второй группе луноход и кабина неподвижны, а устройство перемещает интерфейс, который соединён с кабиной посредством гибкого тоннеля, сильфона. Данный элемент обладает принципиальными недостатками — невысокой надёжностью и практически неремонтопригоден. Поэтому данная группа исключена из дальнейшего рассмотрения.
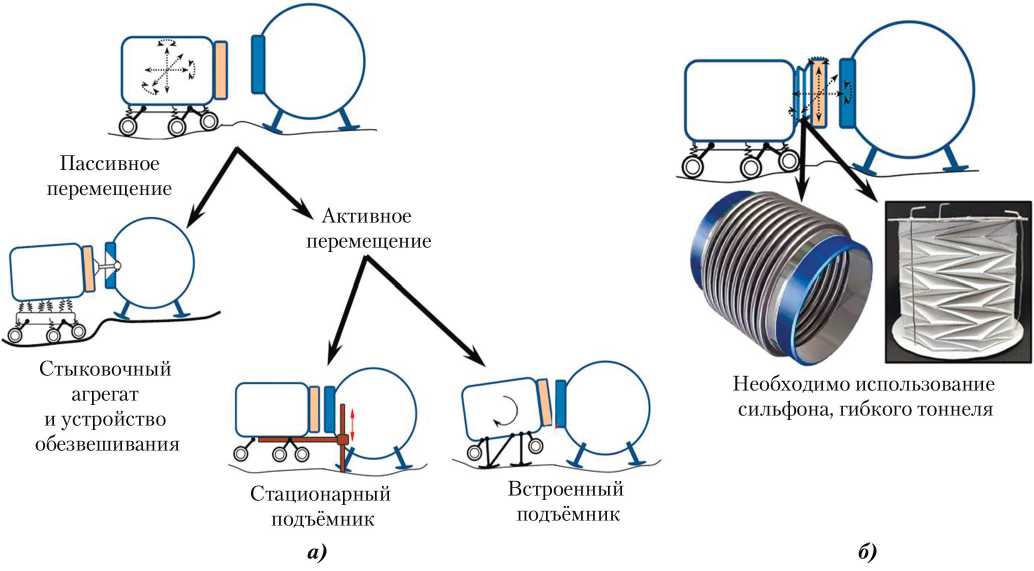
Рис. 1. Классификация устройств для устранения рассогласований стыковочных интерфейсов лунохода и модуля: а — перемещение всего гермообъёма лунохода вместе со стыковочным агрегатом; б — перемещение (пассивное или активное) стыковочного агрегата относительно лунохода
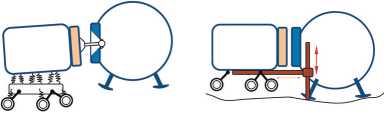
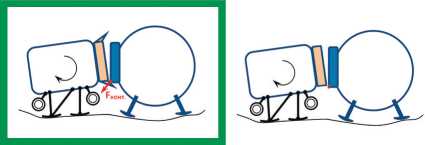
В первой группе устройства по способу компенсации силы тяжести разделены на устройства с пассивным и активным перемещением лунохода (или его кабины). В первом случае устройство только обезвешивает кабину аналогично подвесу кабин современных грузовых автомобилей, стыковочный агрегат идентичен используемым агрегатам при стыковках в невесомости [5]. Во втором случае устройства — это подъёмники. Они могут быть стационарными или встроенными в луноход. Сравнение описанных устройств приведено на рис. 2.
По выбранным критериям оценки наиболее перспективными устройствами для устранения рассогласования являются пружинный подвес кабины и встроенный 6-степенной подъёмник. Подвес дополнительно может выполнять функцию амортизационной системы подвески, обеспечивая комфорт для экипажа.
Вариант с подъёмником имеет много положительных качеств по результатам сравнения. Однако это техническое решение является новым, неотработанным. Поэтому для подтверждения работоспособности варианта, для отработки конструкции, алгоритмов управления был создан макетный комплекс, включающий макеты напланетного модуля и ПГЛ, а также средства управления им.
-
2. основные принципы управления
пилотируемым герметичным луноходом и состав макетного комплекса
Напланетный модуль является неподвижным. Считается, что луноход обез-вешен, и к нему приложена внешняя сила F дожатия . Она направлена в сторону напланетного модуля и не изменяется относительно лунохода. Под воздействием этой силы стыковочные интерфейсы лунохода и модуля сближаются. С некоторого момента направляющие элементы (выступы), расположенные на этих интерфейсах, начинают контактировать между собой. Геометрия элементов выбрана таким образом, что под действием внешней силы F дожатия и контактной силы F конт луноход движется так, что рассогласование между интерфейсами устраняется (рис. 3).
Подъёмник лунохода должен имитировать движение свободного тела (кабины) ПГЛ под действием указанных сил.
|
Критерий |
Обезвешивание лунохода |
Стационарный подъёмник с направляющими |
Встроенный подъёмник, управляемый по контактным силам |
Встроенный подъёмник, управляемый по мишени |
|
Что входит в массу |
Устройство обезвешивания + СтА с СтМ |
Подъёмник + направляющие элементы + СтА (без СтМ) |
Подъёмник + СтА с тензопроставкой (без СтМ) |
Подъёмник + СтА (без СтМ) |
|
Чувствительность к изменению МИХ |
Да |
Нет |
||
|
Требования к прилегающей площадке |
Площадка не должна изменяться при эксплуатации. При стыковке к разным модулям их площадки должны быть идентичными |
Невысокие требования к площадке. Возможность стыковки к модулям, имеющим различные характеристики площадок (допускается разброс по высоте, наклону, наличие ям, колейность) |
||
|
Возможные трудности при реализации |
Выбор параметров устройства обезвешивания |
Монтаж подъёмника на местности, выбор форм направляющих элементов |
Выбор параметров СУ |
Точное определение относительного положения по видео |
|
Отработка конструкции |
Высокая |
Низкая |
||
|
Критичные элементы |
Пружины с малой жёсткостью и большим ходом |
Подъёмник большой жёсткости и точности |
Подъёмник с СУ, тензопроставка |
Подъёмник с СУ |
Рис. 2. Сравнение устройств для устранения рассогласования между стыковочными интерфейсами лунохода и модуля
Примечание. СтА — стыковочный агрегат (стыковочный механизм и механизм герметизации стыка);
СтМ — стыковочный механизм; СУ — система управления; МИХ — массово-инерционные характеристики.
Использующиеся при расчёте этого движения модельные массово-инерционные характеристики и положение центра масс лунохода (ЦМ виртуальный на рис. 3) выбираются экспертно. Их значения должны быть такими, чтобы движение приводило к устранению рассогласования интерфейсов. Строго моделировать движение свободного тела не требуется, главной задачей является устранение рассогласования. Использование для расчёта движения модельных массово-инерционных характеристик лунохода позволяет выполнять задачу независимо от расположения реального центра масс (ЦМ реальный ), которое может изменяться при перемещении экипажа и груза внутри кабины.
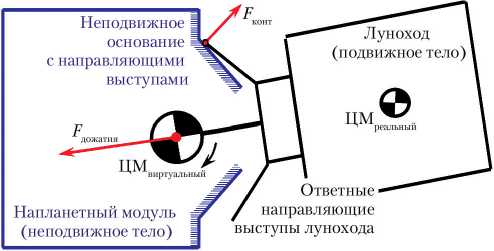
Рис. 3. Схема устранения рассогласования лунохода и напланетного модуля
Устранение рассогласования интерфейсов необходимо выполнять по шести координатам, поэтому, учитывая предыдущий опыт [8–10], в качестве кинематической основы подъёмника в макете ПГЛ была выбрана платформа Гью [6] (этот выбор не является строго обязательным).
Для реализации описанного способа устранения рассогласования, а также для отработки циклограммы соединения ПГЛ с напланетным модулем, включая подвод лунохода в заданную точку космонавтом-оператором, в состав макета ПГЛ включены: шасси, стыковочное устройство (СтУ) с тензопроставкой, подъёмное устройство, управляющая и питающая электроника. Состав макетного комплекса, обеспечивающего работу функционального макета ПГЛ, приведён на рис. 4.
В состав комплекса кроме макета ПГЛ, выполненного в масштабе 1:10 (определялся габаритами датчиков силы и возможностями производства деталей), входят также пульт и макет напланет-ного модуля (его стыковочного интерфейса). Макет ПГЛ является автономным, имеет питание от аккумуляторной батареи и дистанционное радиоуправление.

I
I
■► Сервопривод
Вольтметр |<-
Корпус с опорами
Стыковочный интерфейс (кольцо)
Блок питания
Приводной механизм
Видеокамера с передатчиком
Поворотный механизм
Преобразователи напряжения
f
Приёмник видеосигнала
Колёса L
(2 шт.) | -► Двигатель
Джойстик ПЭВМ
Программное обеспечение
Приёмопередатчик с управляющим контроллером
Аккумулятор 4-
Полуось (2 шт.) *"
•► Дифференциал
Плоский механизм
_С
Корпус

3-координатный акселерометр
I
Приёмопередатчик с управляющим контроллером
Подъёмное устройство (6-степенная платформа)
Дальномер
■► Колёса (2 шт.)
Стыковочное устройство
Основание
Рычаг
(3 шт.)
Штанга (6 шт.)
Тарель (3 шт.)
Кольцо с направляющими
■> Штанга (6 шт.)
Датчик силы
Датчик упора в грунт 4-
Датчик угла поворота в шарнире штанги
Линейный привод с датчиком перемещения
■* Шарнир верхний
-► Шарнир нижний
Датчик совмещения стыков (3 шт.)
Упругий элемент
Замок-собачка (3 шт.) j -
Тяга
Рис. 4. Состав макетного комплекса
В нём используются два радиомодуля. Один — для передачи видеоизображения с прицельной телекамеры лунохода; второй — для передачи телеметрической информации о состоянии лунохода на пульт, а также для приёма команд от пульта. Общий вид макетного комплекса, конструкцию которого разработал и изготовил участник исследовательской группы Виктор Дмитриевич Кобец, приведён на рис. 5.
В состав макета напланетного модуля входят основание из профиля, корпус со стыковочной плоскостью и с направляющими выступами, две мишени. Одна мишень, трапециевидная, позволяет наводить шасси по двум степеням свободы и используется для въезда в область, в которой рабочего пространства подъёмника достаточно для соединения интерфейсов. Вторая, крестообразная мишень, предназначена для предварительного выравнивания интерфейсов по пяти степеням свободы оператором.
Шасси макета пилотируемого герметичного лунохода состоит из ведущей и поворотной осей, закреплённых на раме. Колёса ведущей оси через дифференциал и две полуоси приводятся в движение электродвигателем. Поворотная ось представляет собой плоский механизм (параллелограмм), приводимый в движение сервоприводом.
Стыковочное устройство включает в свой состав основание, тензопро-ставку, кольцо с направляющими выступами, датчики совмещения стыков (ДСС), крюки-собачки с ручным приводом, имитирующие крюки механизма герметизации стыка (МГС). Устройство предназначено для измерения контактных сил и для имитации зацепления МГС за ответный интерфейс.
В качестве подъёмника используется аналог платформы Гью. Изначально предполагалось, что три тарели, на которые опирается подъёмник, должны быть связаны между собой. В этом случае до установки тарелей на грунт основанием платформы был бы корпус лунохода, а управляемым звеном — рама с тремя тарелями. После установки на грунт функции основания и управляемого звена менялись бы местами. Но в дальнейшем штанги могут быть использованы в качестве рычагов независимой подвески.
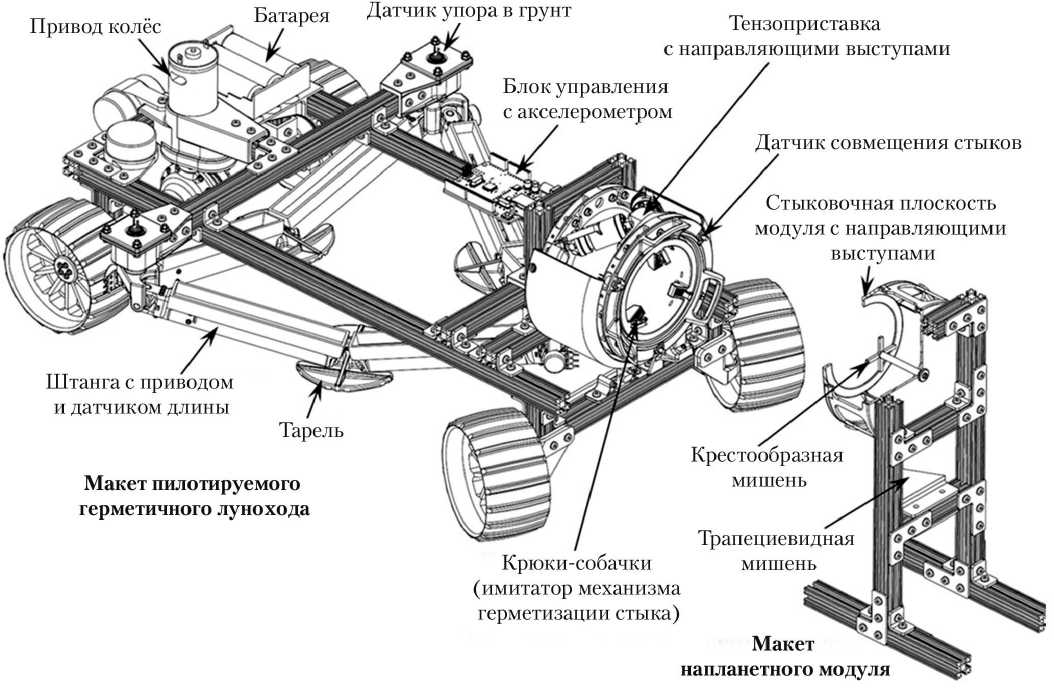
Батарея
Блок управления с акселерометром
Датчик упора в грунт
Датчик совмещения стыков
Крестообразная мишень
Трапециевидная мишень
Стыковочная плоскость модуля с направляющими выступами
Тензоприставка с направляющими выступами
Крюки-собачки (имитатор механизма герметизации стыка)
Макет напланетного модуля
Привод колёс
Макет пилотируемого герметичного лунохода
Штанга с приводом и датчиком длины
Тарель
Рис. 5. Общий вид макетного комплекса (пульт не показан)
Её кинематическая схема в настоящее время не разработана. Ожидается, что пара рычагов должна перемещаться независимо. Поэтому была отработана усложнённая схема, отличающаяся от платформы Гью. В ней тарели не связаны между собой, и для вычисления их координат дополнительно используются датчики угла поворота в шарнирах штанг.
3. конструкция составных частей макета пилотируемого герметичного лунохода
Главной частью конструкции макета является СтУ (рис. 6).
Направляющие выступы СтУ размещаются на кольце, установленном на тензопроставку. На кольце также помещены ДСС, при срабатывании которых формируется сигнал «стык обжат», и стыковка завершается.
Тензопроставка СтУ состоит из шести штанг с датчиками силы, и образует шестимерный базис, по которому раскладываются контактные силы, моменты, воздействующие на кольцо. В качестве чувствительного элемента использовался датчик силы DF 9-40 [11], установленный в соответствии с требованиями к условиям эксплуатации — сила передаётся на датчик через упругую подложку.
Каждая штанга тензопроставки содержит две пружины. Первая пружина предназначена для выведения датчика в середину диапазона измерения, чтобы регистрировать как растяжение, так и сжатие штанги. Вторая (предохранительная) предотвращает перегрузку датчика при нештатном нагружении кольца или при обжатии герметизирующих уплотнений крюками МГС (в макете не задействованы).
Стыковочное устройство содержит корпус с защёлками (крюками-собачками), которые имитируют крюки МГС. Зацепление защёлок определяется по срабатыванию трёх ДСС, сигнализирующих об устранении рассогласования интерфейсов. На корпусе по продольной оси СтУ установлена прицельная видеокамера.
Шесть штанг подъёмного устройства образуют пространственный шестиугольник с тремя закрёпленными относительно корпуса узлами (рис. 7). Каждая штанга связана с двумя соседними. Штанга и одна из связанных с ней прикрепляются к корпусу через рычаг датчика упора в грунт (ДУГ). На этом рычаге для каждой штанги реализован двухстепенной карданный шарнир. Вторая штанга связана с рассматриваемой через тарель. На тарелях для этого реализованы трёхстепенные (сферические) шарниры. Такое распределение степеней свободы, а также положение ДУГ необходимы для упрощения конструкции тарели и более простой организации кабельной сети как для ДУГ, так и для датчиков угла поворота в карданных шарнирах.
Штанга макета сконструирована на
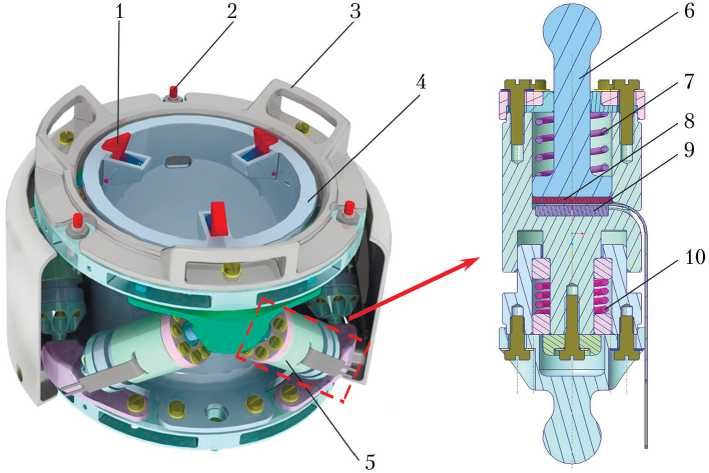
Рис. 6. Стыковочное устройство макета: 1 — крюк-собачка (имитация МГС); 2 — датчик совмещения стыков; 3 — направляющий выступ; 4 — плоскость стыка; 5 — датчик силы (шесть датчиков образуют тензопроставку); 6 — шток; 7 — пружина поджатия; 8 — упругая подложка; 9 — чувствительный элемент; 10 — предохранительная пружина с реверсором
основе готового решения для линейного привода — мотор-редуктора с винтом GA 12- N 20- M 3 [12]. Шток с корпусом штанги образуют кинематическую пару пятого класса на опоре скольжения (шток скользит по корпусу). Шток имеет квадратное сечение для блокирования поворота вокруг своей оси. В корпус устанавливается потенциометр SC -1009 G , использующийся в качестве датчика линейного перемещения штанги. Для имитации разброса характеристик приводов применялись мотор-редук-торы с разным передаточным отношением.

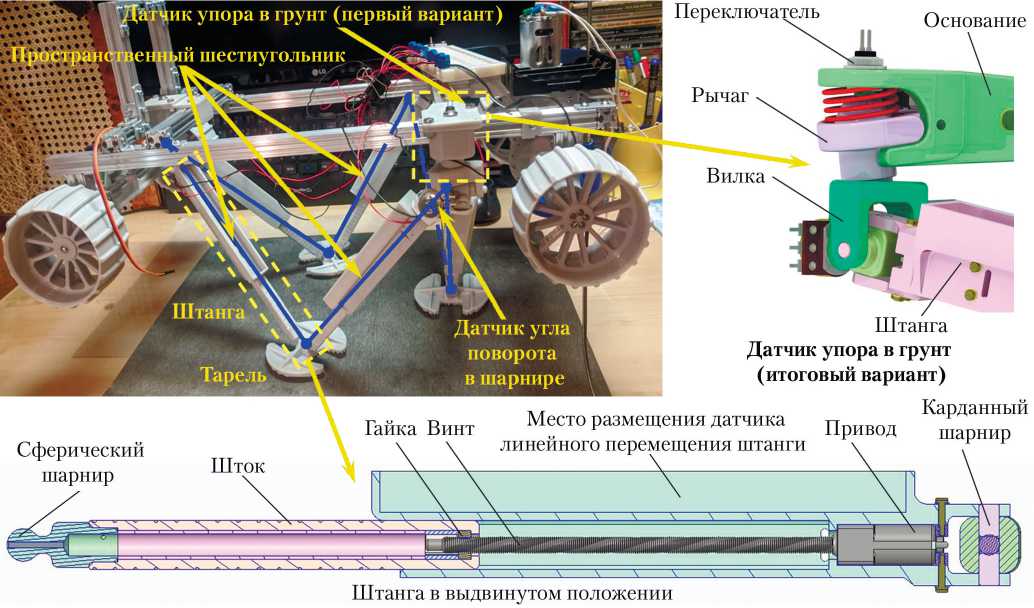
Рис. 7. Подъёмное устройство макета
Масса макета ПГЛ составляет 4,9 кг с учётом массы кабелей, что согласуется с выбранным масштабом. Конструкция выполнена с коэффициентом запаса прочности 2.
4. циклограмма процесса сближения, стыковки и расстыковки
Создание ГП проводится поэтапно в следующем порядке.
-
1. Выполняется колёсное сближение лунохода и напланетного модуля. Для наведения используются трапециевидная мишень и дальномер. Сближение выполняет оператор с помощью пульта. Процесс сближения заканчивается, когда рассогласование лунохода и станции становится меньше заданного (см. разд. 1). При разработке макета учитывалась пропорциональность его линейных размеров реальным величинам.
-
2. Выполняется автоматическая подготовка подъёмного устройства (вводится запретная область для исключения соударения СтУ ПГЛ и станции).
-
2.1. Тарели устанавливаются на грунт (штанги выдвигаются до срабатывания ДУГ). При этом не требуется выравнивание грунтовой площадки до плоского состояния, поскольку математическое ПО ПГЛ предназначено для работы
-
-
2.2. Корпус лунохода перемещается вертикально вверх в связанной с корпусом системе координат на расстояние до 20% от максимально возможного перемещения.
-
2.3. Выполняется выставление корпуса по уровню с использованием датчика местной вертикали (акселерометра).
-
2.4. Корпус лунохода перемещается поочерёдно в сторону каждой таре-ли так, чтобы на каждую пришлось не менее 70% веса лунохода. Это необходимо для уплотнения грунта и снижения риска скольжения тарелей при дальнейших движениях.
-
2.5. Корпус лунохода занимает положение, где проекция его реального ЦМ по направлению вектора местной вертикали попадёт с заданной погрешностью в центр окружности, вписанной в треугольник, образованный центрами трёх тарелей — место, максимально удалённое от границ зоны, в которой возможно опрокидывание лунохода.
-
3. Оператор, ориентируясь на видеоизображение крестообразной мишени, установленной на СтУ напланетного модуля, и показания дальномера, выравнивает совмещаемые интерфейсы. После этого выдаются разрешение и команда на выполнение автоматического устранения рассогласований интерфейсов.
-
4. Автоматическое управление движением лунохода выполняется в соответствии с принципом, описанным в разд. 2. Рассогласование интерфейсов устраняется, срабатывают защёлки МГС и датчики ДСС. При этом стык сжимается силой F дожатия .
-
5. Выполняется окончательное обжатие герметизирующего резинового уплотнения стыка крюками МГС (в макетном комплексе выполнение данной операции не предусмотрено, так как вместо крюков МГС применяются крюки-собачки).
с неизвестным заранее положением таре-лей. Поверхность грунта должна выбираться, но не требует специальной подготовки: ожидается, что для полномасштабного устройства будут допустимы углы наклона поверхности до 15° с размерами камней до 10–15 см.
Параметры представленного алгоритма являются предварительными и могут уточняться в процессе дальнейшей разработки.
В макетном комплексе распознаются следующие нештатные ситуации:
-
• зацепление лунохода за препятствие (нештатное значение сигнала с ДУГ);
-
• скольжение одной или нескольких тарелей (изменение расстояния между тарелями после срабатывания всех ДУГ);
-
• сваливание лунохода (приближение проекции реального центра масс лунохода по местной вертикали к сторонам треугольника, образованного центрами тарелей);
-
• превышение силы, действующей на какой-либо датчик тензопроставки.
При возникновении указанных нештатных ситуаций выполнение текущей команды прекращается с выдачей соответствующего диагностического сообщения.
Расстыковка осуществляется следующим образом:
1. Выполняется расцепление крюков (ручная операция на макете).
2. Расстояние между интерфейсами лунохода и модуля увеличивается до заданного.
3. Выполняется выравнивание ПГЛ по местной вертикали.
4. ПГЛ перемещается вниз вдоль местной вертикали до тех пор, пока все ДУГ обжаты.
5. При пропадании сигнала хотя бы одного ДУГ все штанги укорачиваются до минимальной длины, устанавливая ПГЛ на колёса.
5. Схема управления макетным комплексом
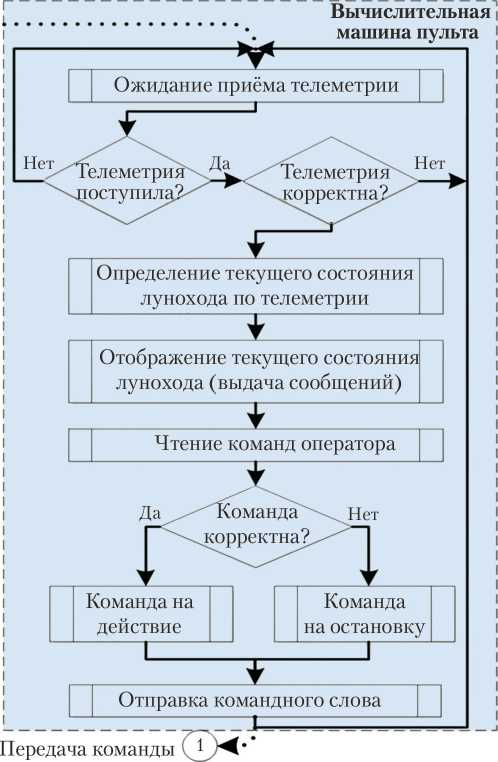
С целью снижения требований к вычислительным средствам, а также учитывая задержку сигнала при возможном управлении ПГЛ с Земли, разработанный алгоритм допускает длительную потерю связи, задержку сигнала. Наиболее простым решением, не требующим организации вычислительного процесса в реальном времени, является управление процессом движения по шагам.
На каждом шаге управления макет лунохода передаёт информацию о своём состоянии в пульт (специализированное устройство), в ответ пульт формирует команду, которую должен выполнить луноход на текущем шаге. При этом учитываются команды, выданные оператором. Цикл управления луноходом приведён на рис. 8. Инициатором каждого шага управления является луноход. Это связано с тем, что пульту необходимо знать его текущее состояние для формирования новой управляющей команды. Если команда не приходит в течение заданного времени, то пакет с телеметрической информацией о состоянии лунохода отправляется повторно.
Пакеты с командами и телеметрической информацией подвергаются проверке. Выполняется анализ контрольных сумм, сигнатур начала и конца пакетов, проверяется порядок следования пакетов.
Бортовая вычислительная машина макета ПГЛ состоит из одноплатных компьютеров Arduino Uno и Arduino Nano [13]. На Uno выполняется программный код, управляющий приводами подъёмника, собирающий и передающий телеметрическую информацию с аналоговых и дискретных датчиков. Для увеличения числа каналов ввода/вы-вода используются расширители портов. Arduino Nano используется для управления сервомашиной поворота рулевых колёс шасси. Это упрощает для неё формирование сигнала широтно-импульсной модуляции из-за особенностей соответствующей стандартной библиотеки.
В качестве пульта используется х86-сов-местимый персональный компьютер. Приёмопередатчик пульта реализован на основе платы nRF24L01+PA+LNA [14] под управлением Arduino Nano . Для ввода информации применяется джойстик Dualshock3 [15].

Рис. 8. Алгоритмы управления луноходом (циклы)
к
о с
S S
S
К го и о 5
по радиоканалу
Видеоизображение на пульте формируется с использованием FPV -комплекта на основе трансмиттера TS5828L 600MW , включающего в свой состав видеокамеру, передатчик, USB -приёмник. Причём, видеопоток с приёмника может быть отображён как видеопоток веб-камеры с использованием стандартного ПО.
Схема информационного взаимодействия в макетном комплексе приведена на рис. 9. Программное обеспечение комплекса разрабатывалось в следующих IDE: Arduino Studio (бортовое ПО и ПО приёмопередатчика пульта), MS Visual Studio (интерфейсы портов ввода/вывода, интерфейсы оператора), QT Creator (управляющее математическое ПО).
6. алгоритм автоматического устранения рассогласования интерфейсов
Автоматическое устранение рассогласования стыковочных интерфейсов выполняется после их выравнивания оператором в ручном режиме (см. разд. 4). Время, отведённое на выполнение команды луноходом (такт управления) составляет 400 мс. Оно в основном определяется временем затухания колебаний конструкции после выполнения заданного перемещения и может быть изменено.
Автоматическое устранение рассогласования интерфейсов выполняется следующим образом:
1. Определяется состояние платформы: координаты центров тарелей в связанной с корпусом лунохода системе координат, а также состояние тензо-проставки: контактные силы, регистрируемые датчиками.
2. С учётом геометрического расположения штанг тензопроставки, контактные силы приводятся к виртуальному центру масс ПГЛ. К нему также приводится сила дожатия.
3. Рассчитывается очередное положение виртуального центра масс ПГЛ, которое он должен занять под действием приложенных сил.
4. По вычисленному положению виртуального центра масс определяются изменения длин штанг подъёмника для воспроизведения приводами. Массово-инерционные параметры выбираются так, чтобы приводы штанг подъёмника успевали отрабатывать изменение длин не более чем за заданное время (примерно 1/3 такта управления).
5. Приводы изменяют длины штанг подъёмника до вычисленных значений.
6. Производится остановка платформы для успокоения колебаний.
7. полученные результаты
Приведённые шаги выполняются до тех пор, пока не будут обжаты датчики совмещения стыков.
При выполнении работы решены следующие задачи:
-
• разработана и отлажена конструкция макетного комплекса. Изготовление в основном производилось методом аддитивной печати;
-
• осуществлён выбор электронных компонентов. Разработана и изготовлена печатная плата. Проведён монтаж компонентов и кабельной сети;
-
• разработан и отлажен приёмопередатчик пульта;
-
• разработано ПО макетного комплекса (рис. 9);
-
• проведены испытания макетного комплекса.
Осуществлена серия стыковок с использованием выбранного способа устранения рассогласований интерфейсов. Достигнута повторяемость результатов. Окончательный вид макетного комплекса, внешний вид интерфейса оператора и ссылка на видеоролик, демонстрирующий функционирование макетного комплекса, приведены на рис. 10.
заключение
Среди рассмотренных способов устранения рассогласования стыковочных интерфейсов пилотируемого герметичного лунохода и лунного модуля для создания их герметичного соединения наиболее перспективным является использование встроенного 6-степенно-го подъёмника, автоматически управляемого по контактным силам стыковочных интерфейсов. Для отработки данного технического решения, являющегося новым, был разработан макетный комплекс. Его испытания подтвердили, что предложенный способ является принципиально работоспособным и технически реализуемым.
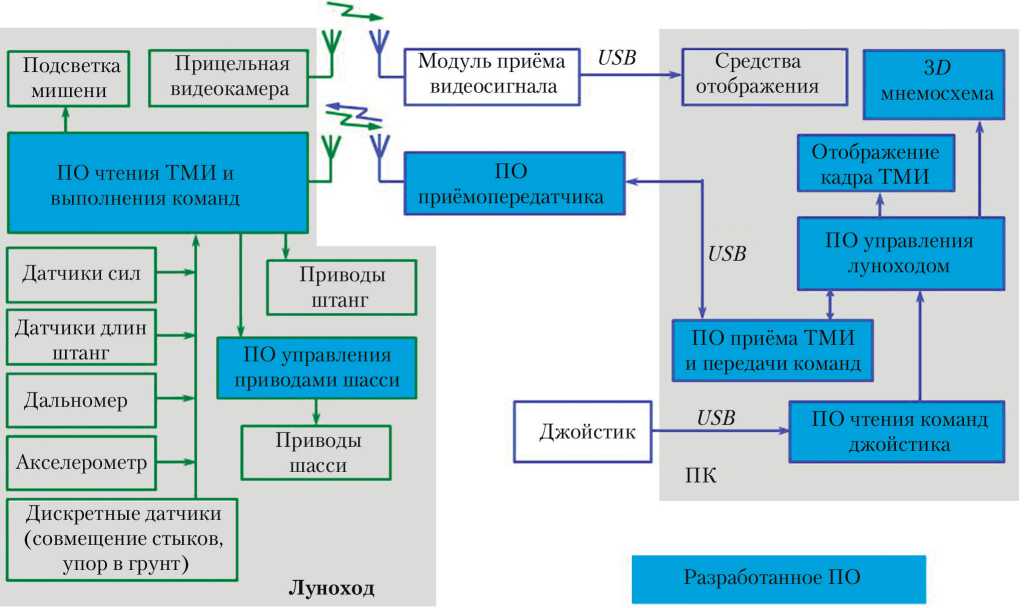
Рис. 9. Схема информационного взаимодействия в макетном комплексе
На этапе эскизного проекта при реализации Российской лунной базы может быть целесообразно открытие ОКР по теме работы. Целью ОКР может быть реализация полномасштабного макетного комплекса с возможностью его дальнейшего оснащения служебными и другими системами для строительства и отработки полнофункционального пилотируемого герметичного лунохода.
Список литературы Способ герметичного соединения пилотируемого лунохода и напланетного модуля
- Луна — шаг к технологиям освоения Солнечной Системы / Под науч. ред. В.П. Легостаева, В.А. Лопоты. М.: РКК «Энергия», 2011. 584 с.
- NASA-CR-192033. Bhardwaj M., Bulsara V., Kokan D., Shariff S, Svawerud E., Win R. Design of a Pressurized Lunar Рис. 10. Общий вид макетного комплекса (а); вид с бортовой видеокамеры rover Virginia Polytechnic на стыковочный интерфейс макета напланетного модуля (б); ссылка на видео.' ° J o ролик, демонстрирующий вариант применения предлагаемого способа стыковки lnstitute and State при создании опорных баз для освоения космического пространства (в) University, 1992. 110 р.
- Imhof B., Ranson S, Mohanty S, Özdemir K, Häuplik-Meusburger S, Frishauf N, Hoheneder W, Waclavicek R. Pressurized Rover for Moon and Mars surface missions // 28th COSPAR Scientific Assembly Held 18, Bremen, Germany, 15.07.2010. P. 3.
- Cohen M. Pressurized Rover Airlocks // 30th International Conference on Environmental Systems, Toulouse, France. July 10-13, 2000. 26 p.
- Сыромятников В.С. Стыковочные устройства космических аппаратов. М.: Машиностроение, 1984. 216 с.
- Gough V.E. Contribution to discussion of papers on research in automobile stability // Proceedings of the Automobile Division of the Institution of Mechanical Engineers. 1957. 171. P. 392-394.
- Патент РФ 2648662. Российская Федерация. Механизм герметизации стыка стыковочного агрегата космического корабля. Бурцев М., Дьяков В., Маленкова И., Рябко Е.; патентообладатель - ПАО «РКК «Энергия»; заявка 2016127970 от 11.07.2016 г. // Бюллетень № 2, опубликовано 16.01.2018 г.
- Чернышев И.Е. Алгоритмы сканирования рабочего пространства перспективного периферийного стыковочного механизма космических аппаратов // Материалы XXXXII Всероссийского симпозиума по механике и процессам управления: Сб. науч. трудов, Миасс, 18-20 декабря 2012 г. Миасс: Российская академия наук, 2012. Т. 2. 188 с.
- Чернышев И.Е. Определение силы сопротивления штанг нового периферийного стыковочного механизма // Тезисы докладов XXI Научно-технической конференции молодых учёных и специалистов, г. Королёв, 2017. Т. 2. С. 210-211.
- Яскевич А.В., Чернышев И.Е. Выбор параметров накопителя энергии для нового периферийного стыковочного механизма // Космическая техника и технологии. 2019. № 2(25). С. 55-66.
- Film Pressure Sensor DF9-40. Режим доступа: https://www.winsen-sensor.eom/d/ files/df9-40%4010kg.pdf (дата обращения 18.11.2021 г.).
- G12-N20 Geared Mini ВС Motor Режим доступа: https://www.handsontee. eom/dataspees/motor_fan/GA12-N20.pdf (дата обращения 18.11.2021 г.).
- Контроллеры Arduino. Режим доступа: www.arduino.ee (дата обращения 18.11.2021 г.).
- Single chip 2.4 GHz Transceiner nRF24L01. Режим доступа: https://www. sparkfun.com/datasheets/Components/ nRF24L01_prelim_prod_spec_ 1_2.pdf (дата обращения 18.11.2021 г.).
- Контроллер DualShock. Режим доступа: ru.m.wikipedia.org/wiki/DualShock (дата обращения 18.11.2021 г.).
