Способ идентификации имитационных помех в импульсно-доплеровской активной радиолокационной головке самонаведения ракеты «воздух-воздух » при ее наведении на вертолет

Автор: Васильев О.В., Кучин А.А., Парфенов К.В., Савельева И.А., Филонов А.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 2 т.19, 2026 года.
Бесплатный доступ
В статье на примере с амонаведения ракеты « воздух-воздух » с активной радиолокационной головкой самонаведения (АРГС) на вертолет при постановке им уводящих по дальности и скорости помех исследован способ их идентификации на основе маловысотности полета и особенностей отраженного радиолокационного сигнала от наступающих лопастей несущего винта вертолета. На основе результатов моделирования установлена возможность выставления порогов для идентификации воздействия или отсутствия воздействия на АРГС ракеты «воздух-воздух », уводящих по дальности и скорости помех во всех их комбинациях. Реализация предложенного подхода позволит своевременно применить в ракете «воздух-воздух » средства помехозащиты и тем самым снизить конечный промах.
Ракета «воздух-воздух », вертолет, идентификация уводящих по дальности и скорости помех, вычисленная дальность, энергетический центр лопасти
Короткий адрес: https://sciup.org/146283269
IDR: 146283269 | УДК: 623.462.7
Method for Identifying Simulated Interference in a Pulse – Doppler Active Radar Homing Head of an Air-to-Air Missile When It Is Aimed at a Helicopter
In the article, using the example of the homing of the air-to- air missile with an active radar homing head (ARHH) on a helicopter when it is set up with interference that leads away in range and speed, a method for identifying them is studied based on the low flight altitude and the characteristics of the reflected radar signal from the advancing blades of the helicopter`s main rotor. Based on the results of the modeling, the possibility of setting thresholds for identifying the impact or lack of impact on the air-to- air missile`s ARHH of interference leading in range and speed in all their combinations has been established. The implementation of the proposed approach will allow the timely application of jamming protection measures in the air-to- air missile and thereby reduce the final miss.
Текст научной статьи Способ идентификации имитационных помех в импульсно-доплеровской активной радиолокационной головке самонаведения ракеты «воздух-воздух » при ее наведении на вертолет
Опыт современных боевых действий показал, что вертолеты являются мощным средством борьбы с артиллерией, бронетанковой и автотранспортной техникой [1].
Применение авиационной управляемой ракеты «воздух-воздух» с активной радиолокационной головкой самонаведения (АРГС), построенной по импульсно-доплеровскому принципу обработки в ней отраженных от воздушных целей радиолокационных сигналов, позволит выполнять атаку вертолета по принципу «пустил – забыл» [1].
В свою очередь, применение вертолетов военного назначения в современных условиях предполагает некоторые особенности, которые затрудняют противодействие такому классу целей с помощью управляемых ракет «воздух–воздух» с АРГС. Это обусловлено следующими факторами.
Во-первых, маловысотность полета вертолета затрудняет измерение параметров его полета в АРГС ракеты «воздух-воздух», так как подстилающая поверхность вызывает мощные отражения радиолокационного сигнала. Помимо этого, маловысотность является причиной – 261 – возникновения пассивной помехи, типа «антипод», когда в АРГС возникает двойник вертолета, который как будто летит под землей, на глубине, равной высоте полета вертолета [2].
Во-вторых, вертолет способен зависнуть в воздухе, что также усложняет измерение параметров его положения в пространстве и может привести к срыву его сопровождения в АРГС ракеты [3].
В-третьих, вертолет способен очень быстро менять направление своего полета, в том числе способен осуществлять разворот, зависнув в пространстве, и после этого начать полет в другом направлении, что значительно усложняет самонаведение ракеты на него [4].
В-четвертых, современная армейская авиация оснащается бортовыми комплексами обороны со станциями активных помех (аппаратурой радиоэлектронной борьбы) и способна ставить преднамеренные помехи различного характера. Одним из видов преднамеренных помех являются имитирующие помехи, к которым относятся уводящие по дальности и скорости [5].
Увод по дальности и скорости достигается ретрансляцией принятого от АРГС ракеты радиолокационного сигнала с постепенным изменением времени задержки t з этого сигнала или его доплеровской частоты F д для подавляемой АРГС [6]. При этом условиями эффективного увода от истинной цели являются:
-
– когерентность помех, т.е. ошибка запоминания несущей частоты в передатчике помех не должна превышать половину ширины узкополосного доплеровского фильтра приемного устройства АРГС ракеты;
-
– «плавность» увода – спектр закона увода должен находиться в пределах полосы пропускания следящей системы;
-
– мощность помехи в начале увода должна в 2…3 раза превышать мощность полезного сигнала на входе приемного устройства АРГС ракеты [7].
Уводящие по дальности и скорости помехи приводят к значительному искажению оценок дальности и скорости в системах автосопровождения по дальности (АСД) и скорости (АСС) в АРГС ракеты «воздух–воздух». Конечной целью постановки такого вида помех является срыв автосопровождения по направлению (АСН). Это достигается тем, что по окончании цикла увода постановщик помех переходит в режим «молчания», происходит срыв автосопровождения не только в системе АСД или АСС, но и в системе АСН, после чего АРГС ракеты переходит в режим поиска цели [8].
Одной из задач функционирования АРГС ракеты является анализ помеховой обстановки и при необходимости включение тех или иных средств помехозащиты [9].
Таким образом, в условиях воздействия на импульсно-доплеровскую АРГС ракеты «воздух-воздух» уводящих по дальности и скорости помех необходимо принимать дополнительные меры помехозащиты в целях минимизации промаха ракеты при ее самонаведении на вертолет. В интересах повышения эффективности помехозащиты АРГС самонаводящейся ракеты необходимо предварительно осуществлять идентификацию воздействия уводящих по дальности и скорости помех.
Идентификация уводящих помех по дальности
В данной работе при решении вопроса идентификации уводящих по дальности и скорости помех в АРГС ракеты «воздух-воздух» рассматривается наведение на вертолет в вертикальной плоскости.
Как правило, для идентификации уводящих по дальности и скорости помех в АРГС ракеты происходит сравнение измерений, полученных из скоростного канала, и производных измерений, полученных из дальномерного канала. Далее с порогом ε 1 сравнивается модуль разности показателей производных измерений дальности «ракета-вертолет» Ди из дальномерного канала АРГС ракеты и доплеровской частоты F ф , обусловленной скоростью сближения ракеты с фюзеляжем вертолета, из скоростного канала АРГС ракеты в соответствии с выражением
где λ – длина волны зондирующего радиолокационного сигнала АРГС.
Невыполнение условия (1) говорит о воздействии на ракету «воздух–воздух» уводящих по дальности и скорости помех, но неизвестно, каких именно, поэтому требуется дополнительная идентификация уводящих по дальности и скорости помех.
В системе автономных датчиков ракеты «воздух-воздух» при помощи гироскопов и акселерометров, а также информации, загруженной в ракету перед пуском, из информационновычислительной системы летального аппарата, с которого был произведен пуск, на основе оценок параметров полета ракеты может вычисляться ее высота полета относительно земной поверхности H р .
Чтобы вычислить дальность предлагаемым способом, необходимо найти первое пересечение прямой от АРГС ракеты до земной поверхности в направлении на вертолет. Таким образом, необходимо в уравнение окружности подставить уравнение прямой и найти ближайшую точку пересечения прямой с окружностью, эквивалентный радиус Земли R экв при этом равен 8500 км [10]. В этих целях нужно задать систему координат в вертикальной плоскости (в данной работе центр Земли будет иметь координату по оси абсцисс x = 0, а по оси ординат y = 0). Помимо этого необходимо знать высоту H р и угол места вертолета ε ум , измеряемый антенной системой АРГС (угол наклона линии визирования в направлении на вертолет относительно горизонтальной плоскости) [11].
Линейное уравнение, описывающее прямую от АРГС ракеты через земную поверхность в направлении на вертолет, имеет вид:
-
У — tg^Syv )х + RaKe + Нр.(2)
В свою очередь, уравнение описывающее окружность Земли, имеет вид:
-
У + X = RaKe .(3)
Для того чтобы найти точки пересечения прямой от АРГС ракеты с земной поверхностью, необходимо подставить выражение (2) в выражение (3) вместо y , тогда выражение (3) примет вид:
(tg(^yu)x A-R aKe А-Н рД + Х — RaKe.(4)
После преобразования уравнение (4) примет вид
(tg~ (ёум^Х~ A-^tg^GyM^X (Даке + Нр ^ + (RaKe + Нр^ + Х^ = Raws.(5)
После элементарных математических преобразований выражение (5) примет вид
2>tg^ ^£ум)х^ + 2tg(£ум )(Дэкв + H p)x + (Дэкв + Hp)^ — Rme =0. (6)
После решения уравнения (6) необходимо найти корень x j из полученных, соответствующий координате x в первого пересечения прямой от АРГС ракеты с земной поверхностью в направлении на вертолет по правилу
Xe = min Xj , где j = 1, 2; j – количество корней уравнения (6).
После отыскания xв необходимо решить равенство (2), подставив туда xв вместо x, для отыскания координаты yв, соответствующей первому пересечению прямой от АРГС ракеты с земной поверхностью в направлении на вертолет. Тогда вычисление равенства (2) можно произвести в соответствии с выражением ye = tg(£yv )Xe + RdKe + Hp .
Теперь вычисление дальности от АРГС ракеты до земной поверхности в направлении на вертолет Д в можно произвести в соответствии с выражением
Де — ^Xe +(ye — R'3kb — Hp)2 . (7)
Ошибку Δ Д вычисленной дальности Д в по отношению к измеренной дальности Д и классическим способом можно оценить по геометрическим соображениям, зная высоту полета вертолета Н в в соответствии с выражением
В дальности Д в , вычисленной по соотношению (6), отсутствует зависимость от времени задержки t з отраженного от вертолета радиолокационного сигнала, таким образом, постановка вертолетом уводящих помех по дальности не будет оказывать на нее никакого влияния. Вычисление дальности Д в графически поясняется на рис. 1.
В зависимости от собственной высоты вертолета над земной поверхностью вычисленная дальность Д в имеет незначительные расхождения от измеренной классическим способом дальности Д и (рис. 1) в дальномерном канале АРГС ракеты по соотношению
где с – скорость света.
Произведены расчеты геометрической ошибки Δ Д вычисленной дальности Д в в зависимости от угла места вертолета ε ум на высотах полета вертолета H р = 50, 100 и 200 м при имеющихся измерениях дальности Д и «ракета-вертолет» при условиях отсутствия воздействия на АРГС ракеты «воздух–воздух» уводящих по дальности и скорости помех и постоянной высоты полета ракеты H р = 6000 м. Результаты представлены в табл. 1.
Таким образом, малая высота полета вертолета вносит незначительную ошибку в значение вычисленной в соответствии с соотношением (6) дальности Д в .
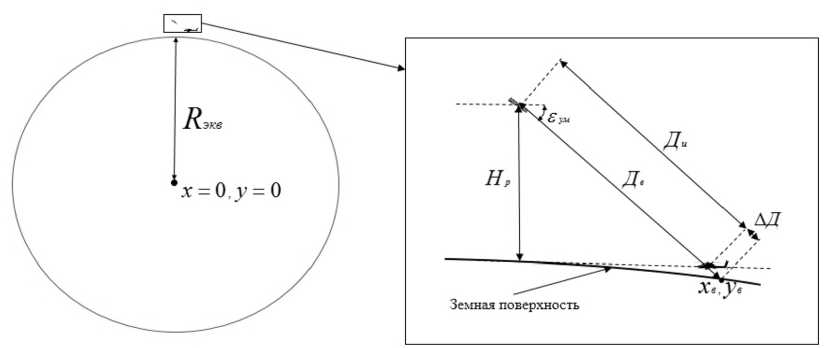
Рис. 1. Вычисленная и измеренная дальность до вертолета
Fig. 1. Calculated and measured range
Таблица 1. Геометрическая ошибка вычисленной дальности Δ Д
Table 1. Geometric error of the calculated range Δ Д
|
Hв = 50 м |
||||
|
ε ум [град] |
Д и [м] |
Д в [м] |
Δ Д [м] |
|
|
20 |
17443,62 |
17589,82 |
146,2 |
|
|
25 |
14102,02 |
14220,33 |
118,31 |
|
|
30 |
11912,73 |
12012,73 |
100 |
|
|
35 |
10381,05 |
10468,22 |
87,17 |
|
|
40 |
9261,23 |
9339,03 |
77,8 |
|
|
45 |
8417,56 |
8488,28 |
70,72 |
|
|
50 |
7769,12 |
7834,39 |
65,27 |
|
|
Hв = 100 м |
||||
|
20 |
17297,43 |
17589,82 |
292,39 |
|
|
25 |
13983,71 |
14220,33 |
236,62 |
|
|
30 |
11812,73 |
12012,73 |
200 |
|
|
35 |
10293,88 |
10468,22 |
174,34 |
|
|
40 |
9183,45 |
9339,03 |
155,58 |
|
|
45 |
8346,86 |
8488,28 |
141,42 |
|
|
50 |
7703,85 |
7834,39 |
130,54 |
|
|
Hв = 200 м |
||||
|
20 |
17005,05 |
17589,82 |
584,77 |
|
|
25 |
13747,09 |
14220,33 |
473,24 |
|
|
30 |
11612,73 |
12012,73 |
400 |
|
|
35 |
10119,53 |
10468,22 |
348,69 |
|
|
40 |
9027,88 |
9339,03 |
311,15 |
|
|
45 |
8205,43 |
8488,28 |
282,85 |
|
|
50 |
7573,31 |
7834,39 |
261,08 |
|
Типовыми параметрами уводящей по дальности помехи являются длительность увода t у от 0,5 до 20 с и максимальное уводящее время задержки Δ t з от 1 до 30 мкс (Δ Д и = 150…4500 м), закон увода линейный или параболический.
Произведены расчеты дальностей Д в и Д и в условиях постановки вертолетом уводящей помехи по дальности по линейному (рис. 2) и параболическому (рис. 3) закону увода, с временем увода t у = 10 с и максимальным искажением измеренной дальности Δ Д и = 4500 м
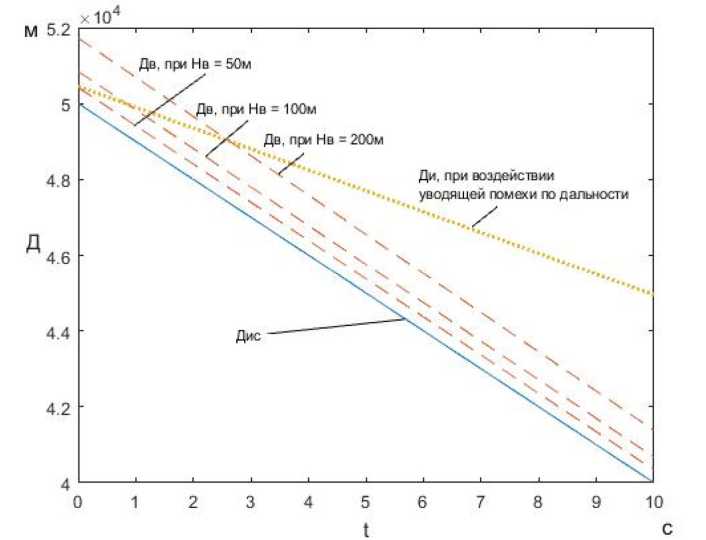
Рис. 2. Истинная, измеренная и вычисленная дальности при линейном законе увода по дальности
Fig. 2. True, measured and calculated ranges under linear drift law
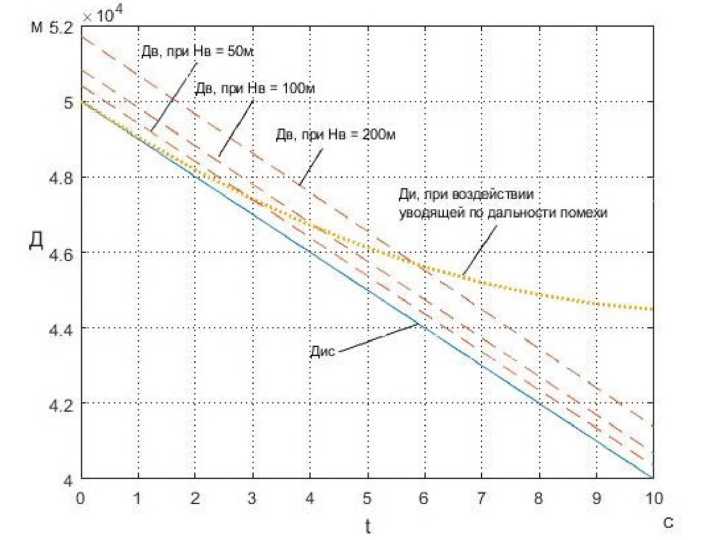
Рис. 3. Истинная, измеренная и вычисленная дальности при параболическом законе увода по дальности
Fig. 3. True, measured and calculated ranges under parabolic drift law
(Δ t з = 30 мкс), на высотах полета вертолета H р = 50, 100 и 200 м, с изменением истинной дальности «ракета-вертолет» Д ис с 50000 до 40000 м за 10 сек, с постоянной высотой полета ракеты H р = 6000 м.
Проанализировав данные, представленные на рис. 2 и 3, можно сделать вывод, что вычисленная дальность Д в меняется по определенному закону, в зависимости от характера полета вертолета, а в случае маневра вертолета будет почти совпадать с истинной дальностью Д ис ввиду малых скоростей полета вертолета и его возможностей по набору и снижению высоты, поэтому представляется возможность провести идентификацию уводящей помехи по дальности путем установления порога ε 2 для модуля разности вычисленной Д в и измеренной Д и дальностей в соответствии с выражением
\Ди -Дв\<£2 . (8)
Идентификация уводящих помех по скорости
Уводящие по скорости помехи, в свою очередь, могут ставиться совместно с уводящими по дальности и быть с ними функционально взаимосвязанными, функционально невзаимосвязанными, либо ставиться отдельно, независимо от уводящих помех по дальности. В случае постановки уводящих по скорости помех искажается доплеровская частота, обусловленная сближением ракеты с фюзеляжем вертолета F ф , по аналогичным соображениям, приведенным для искажения времени задержки t з .
Однако в таком случае после процедуры быстрого преобразования Фурье (БПФ) в амплитудно–частотном спектре отраженного от вертолета сигнала S ( f ) возможно вычисление доплеровской частоты, обусловленной сближением ракеты и энергетического центра вращающихся лопастей несущего винта вертолета F л (рис. 4) по соотношению
Ft- 1 ;,
Mi А]
где M {…} – операция математического ожидания; F i и A i – соответственно i –я доплеровская частота и амплитуда спектральной составляющей, соответствующая отражениям РЛ сигнала от наступающей лопасти несущего винта вертолета; I = 1, …, I; I – общее количество доплеровских частот и амплитуд спектральных составляющих, соответствующих отражениям радиолокационного сигнала от наступающей лопасти несущего винта вертолета [12].
Доплеровская частота F л, обусловленная сближением ракеты и энергетического центра наступающих лопастей, не подвержена влиянию уводящих по скорости помех в отличие от фюзеляжной компоненты F ф . Воздействие уводящей по скорости помехи с временем увода t y = 4 с, изменением истинной доплеровской частоты, обусловленной сближением ракеты «воздух–воздух» с фюзеляжем вертолета F ф и с 62000 до 59500 Гц, и искажением доплеровской частоты Δ F ф = 6500 Гц (в случае, если λ = 0.03 м, искажение радиальной скорости вертолета Δ V в = 97.5 м/с) показано на рис. 5, где t 1 – момент начала постановки уводящей по скорости помехи вертолетом, в этот момент в скоростном канале АРГС автосопровождение F ф сбрасывается и АРГС перезахватывает уводящую по скорости помеху, при этом F л меняется почти пропорционально F ф [13].
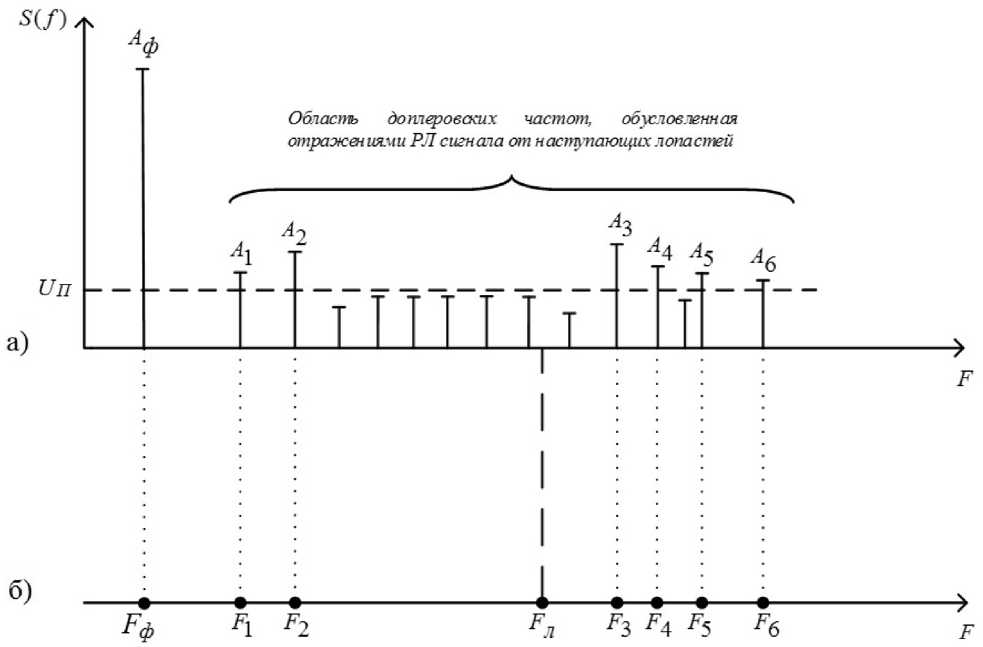
Рис. 4. Определение энергетического центра лопастей
-
Fig. 4. Determination of the energy center of the blades
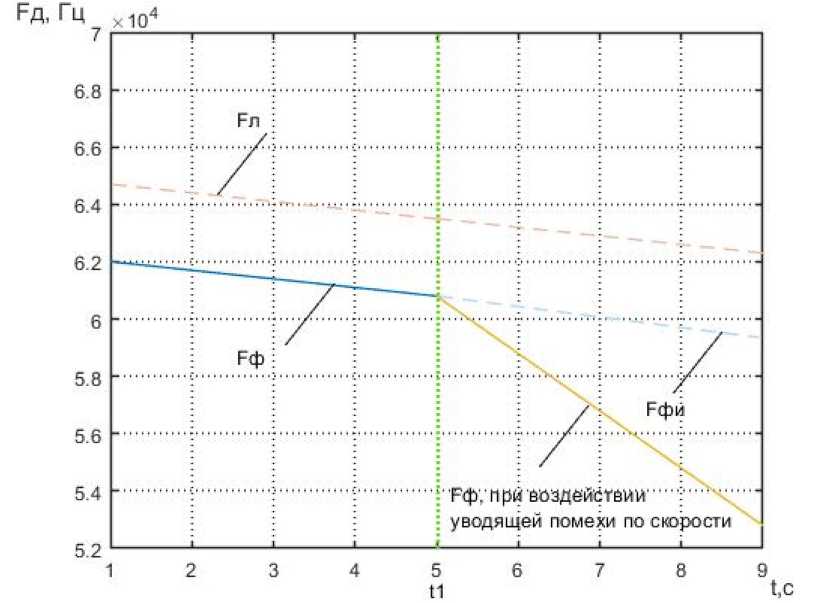
Рис. 5. Воздействие уводящей по скорости помехи на Fл
-
Fig. 5. The effect of the speed-destroying interference on Fл
Проанализировав рис. 5, можно сделать вывод, что параллельность изменения и небольшие различия Fл и Fф позволяют идентифицировать уводящую помеху по скорости, выставив порог ε3 для разности производных доплеровских частот Fn и Рф по модулю в соответствии с выражением
Таблица 2. Идентификация уводящих по дальности и скорости помех
Table 2. Identification of diverting interference by range and speed
|
Условие |
Результат выполнения условий |
|||
|
Помех нет |
Уводящая помеха по дальности |
Уводящая помеха по скорости |
Уводящие помехи по дальности и скорости одновременно |
|
|
к>« |
«Да» |
«Да» |
«Да» |
«Нет» |
|
| Д и – Д в| ≤ ε 2 |
«Да» |
«Нет» |
«Да» |
«Нет» |
|
ft -Гф\<£з |
«Да» |
«Да» |
«Нет» |
«Нет» |
По соотношениям (1), (8) и (9) можно выявить воздействие или отсутствие воздействия уводящих по дальности и скорости помех на импульсно-доплеровскую АРГС ракеты «воздух-воздух» в различных их комбинациях (табл. 2).
Заключение
Таким образом, в импульсно-доплеровской АРГС ракеты «воздух–воздух» возможна идентификация различных комбинаций воздействия или отсутствия воздействия на нее уводящих по дальности и скорости помех вышеприведенным способом, что позволит использовать результаты идентификации в алгоритме информационного обеспечения ракеты в качестве средства помехозащиты и повысить точность самонаведения ракеты на вертолет.
