Способ обеспечения навигационной безопасности для автономного необитаемого подводного аппарата

Автор: Шостак С. В., Бенгард А. В., Дорофеев Г. В., Стародубцев П. А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Математическое моделирование. Численный эксперимент
Статья в выпуске: 6 т.17, 2024 года.
Бесплатный доступ
Подводная робототехника стала неотъемлемой частью исследования Мирового океана. В частности, наиболее распространены необитаемые подводные аппараты, поскольку с их помощью можно добраться до труднодоступных мест с минимальным участием человека. Навигационное обеспечение играет важную роль в современной робототехнике, особенно когда дело касается автономных необитаемых подводных аппаратов. В настоящее время для решения задач навигационной безопасности используются активные гидролокаторы, оснащенные приемной антенной, приемником и специальным излучателем, при этом сам излучатель должен вращаться в нужном направлении. Целью данного исследования является разработка метода обеспечения навигационной безопасности для автономного необитаемого подводного аппарата с использованием пространственно-временного сигнала. Представлены модель формирования пространственно-временного сигнала, а также выражения для реализации данного способа. Также проведена оценка разрешающей способности по пеленгу. Полученные результаты проверены моделированием в среде MATLAB при различных отношениях сигнал/шум.
Подводный аппарат, пространственно-временной сигнал, антенная решетка, обнаружение объекта, разрешающая способность, быстрое преобразование фурье
Короткий адрес: https://sciup.org/146282895
IDR: 146282895 | УДК: 681.2.083
Method for ensuring navigation safety for an autonomous uninhabited underwater vehicle
Nowadays, underwater robotics is developing very fast. In particular, unmanned underwater vehicles are the most common because they can be used to reach hard-to-reach places with minimal human intervention. Navigation plays an important role in modern robotics, especially when it comes to autonomous underwater vehicles. Currently, to solve navigation safety problems, active sonars are used, equipped with a receiving antenna, a receiver and a special emitter, while the emitter itself must rotate in the desired direction. The goal of this work is to develop a method for ensuring navigation safety for an autonomous underwater vehicle using a spatio-temporal signal. A model for the formation of a spatio-temporal signal, as well as expressions for implementing this method, are presented. The bearing resolution was also assessed. The results obtained were verified by simulation in MATLAB at various signal-to-noise ratios.
Текст научной статьи Способ обеспечения навигационной безопасности для автономного необитаемого подводного аппарата
Цитирование: Шостак С. В. Способ обеспечения навигационной безопасности для автономного необитаемого подводного аппарата / С. В. Шостак, А. В. Бенгард, Г. В. Дорофеев, П. А. Стародубцев // Журн. Сиб. федер. ун-та. Техника и технологии, 2024, 17(6). С. 814–821. EDN: RBLONU
Активное освоение Мирового океана вызвало бурное развитие технологий в области исследования подводного пространства. Наиболее перспективным средством изучения Мирового океана служат необитаемые подводные аппараты (НПА), когда человек отсутствует на борту аппарата. Главным преимуществом НПА является возможность работы в сложной окружающей обстановке с минимальным участием человека. Наиболее востребовано применение НПА на больших глубинах, а также в покрытых льдом районах [1, 2, 3].
В настоящее время известны три типа НПА: буксируемые, самоходные, управляемые по кабелю, и автономные самоходные. Наиболее примечательный тип – автономные самоходные НПА. Указанный тип НПА является автономным необитаемым подводным аппаратом (АНПА). Такие аппараты используются в качестве информационных средств для решения различных исследовательских задач освоения Мирового океана и подледных исследований [1, 2].
Для решения поставленных задач АНПА принципиально необходимо навигационное обеспечение работ. В настоящее время для этого используются активные гидролокаторы. Такой – 815 – гидролокатор излучает звуковые сигналы в заданном направлении и принимает отраженное эхо. По скорости получения ответной реакции от сканируемого объекта вычисляется расстояние до него. Для совершения подобных операций гидролокатор оснащается специальным излучателем, приемной антенной и приемником. При этом излучатель гидролокатора свободно вращается в необходимом направлении [3].
Рассмотрим другой способ локализации объектов в пространстве, когда формируется веер характеристик направленности в приемной антенне, что позволяет одновременно «освещать» пространство в широком секторе углов.
В качестве приемной антенны и для упрощения выкладок будем рассматривать линейную антенную решетку (АР), состоящую из M преобразователей. Геометрия линейной эквидистантной антенной решетки и падающей волны с плоским фронтом представлена на рис. 1.
В результате в АР формируется пространственно-временной сигнал (ПВС) вида

= ej2^fot . e-j^dmSine0'
В выражении (1) f 0 – центральная частота гармонического сигнала, t – время, λ 0 – длина волны сигнала, d – расстояние между преобразователями, θ 0 – угол падения волны.
Так как обработка сигнала проводится, как правило, в дискретном виде и, учитывая, что d = 0,5 λ 0 , выражение (1) преобразуется
s(n,m) = e}^k°n ■ e-)™smeOi (2)
где k 0 – номер отсчета частоты для центральной частоты f 0; n = (0 ÷ N – 1) – отсчеты в области времени; N – число отсчетов.
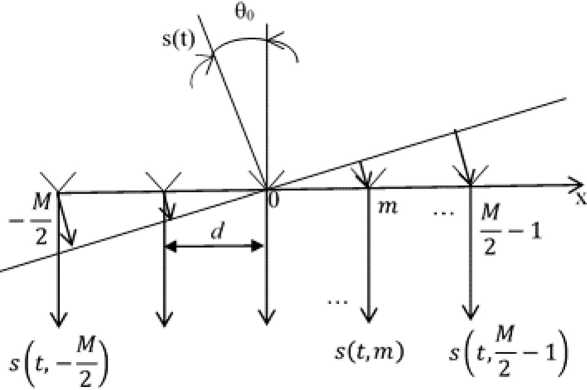
Рис. 1. Модель формирования пространственно-временного сигнала на антенной решетке: s ( t ) – приходящий сигнал, θ 0 – направление на источник сигнала, s ( t , m ) – сигнал в канале m , m – номер преобразователя антенной решетки, M – число преобразователей антенной решетки, d – расстояние между элементами решетки
-
Fig. 1. Model of the formation of a spatiotemporal signal on the antenna array: s(t) is the incoming signal, θ 0 is the direction to the signal source, s(t, m) is the signal in channel m, m is the number of the antenna array converter, M is the number of antenna array converters, d is the distance between the elements grids
Как видно из (1) и (2), ПВС факторизуется, т.е. представляется произведением временной и пространственной составляющих. Это позволяет проводить обработку раздельно как по временной, так и по пространственной координатам.
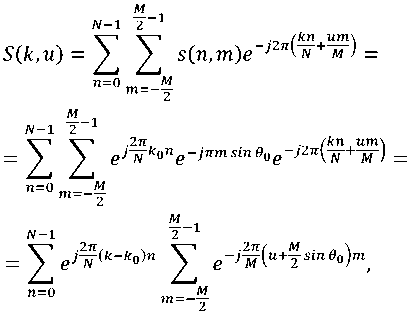
Получим двухмерный спектр Фурье выражения (2) [4]:

М \
--1) , u – пространственная частота.
В выражении (3) первая сумма определяет частотный спектр сигнала (2), вторая определя- м ет пространственный спектр. При условии k = k0 и и = - —sin 0О выражение (3) имеет максимальное значение
S^k,^ ^N-M.
Для раздельного наблюдения целей, находящихся на разных пеленгах, необходимо оценить разрешающую способность [5, 6]. Разрешающая способность по пеленгу определяется ортогональностью пространственных гармоник. Получим условия ортогональности для двух близкорасположенных по пеленгу целей, для чего найдем скалярное произведение двух гармоник e –π m sinθ 1 и e –π m sinθ 2
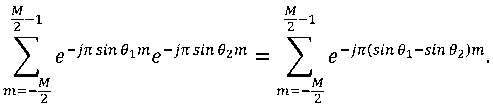
Несложно показать, что (5) – это сумма геометрической прогрессии, модуль которой равен
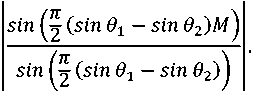
Отсюда следует, что две пространственные гармоники ортогональны, если выполняется условие
sin 0, - sin вт = + —. M
Рис. 2. Подводный аппарат и обнаружение им малоразмерного объекта
-
Fig. 2. Underwater vehicle and its detection of a small object
Предполагается, что на АНПА длиной в 3 м при рабочей частоте f 0 = 200 кГц можно разместить 80 элементов с общей длиной антенны 30 см. При этом максимальная дальность будет составлять 300 м [7].
Для проверки работоспособности вышеизложенного способа проведем моделирование в среде MATLAB [8]. Возьмем в качестве примера подводный аппарат, имеющий на борту 32 преобразователя и излучающий сигнал с длительностью в 128 отсчетов. Предполагается, что подводные объекты находятся на пеленгах 19° и 23° соответственно. На рис. 3–6 представлены спектры ПВС в трехмерном виде при различных отношениях сигнал/шум: при отсутствии помех, 3дБ, –10 дБ и –15 дБ, а на рис. 7 – двухмерные изображения спектров ПВС при тех же отношениях сигнал/шум.
Рис. 3. Спектр ПВС в трехмерном виде при отсутствии помех
Fig. 3. The PVS spectrum in three-dimensional form in the absence of interference
Рис. 4. Спектр ПВС в трехмерном виде при отношении сигнал/шум S/N = 3 дБ
Fig. 4. The PVS spectrum in three-dimensional form with a signal-to-noise ratio S/N = 3 dB
Рис. 5. Спектр ПВС в трехмерном виде при отношении сигнал/шум S/N = –10 дБ
Fig. 5. The PVS spectrum in three-dimensional form with a signal-to-noise ratio S/N = –10 dB
Как можно заметить на рис. 3–7, положение подводного объекта по пеленгу можно оценить даже при относительно низких уровнях отношения сигнал/шум. Особенно это заметно на рис. 7.
В представленных материалах рассмотрен способ обнаружения целей и оценка их координат для АПА. Задача решается на основе обработки ПВС. В работе представлена модель формирования ПВС. Показано, что для простого гармонического сигнала ПВС разлагается в произведение временной и пространственной составляющих. Это делает возможным проводить двухмерное спектральное разложение ПВС. Разложение проводится на основе алгоритма быстрого преобразования Фурье (БПФ), что позволяет формировать в приемной антенне веер характеристик направленности и одновременно обнаруживать подводные цели на различных на-
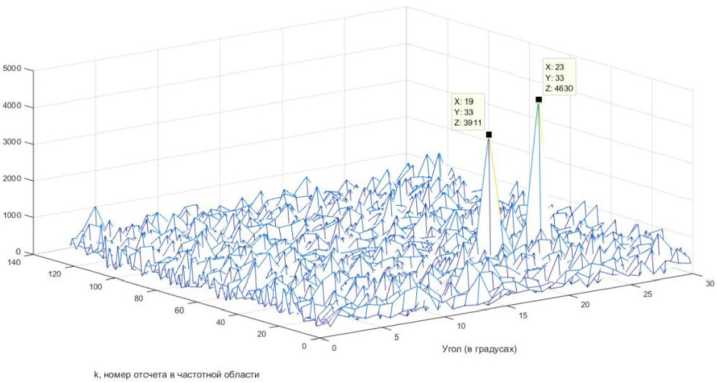
Рис. 6. Спектр ПВС в трехмерном виде при отношении сигнал/шум S/N = –15 дБ
Fig. 6. The PVS spectrum in three-dimensional form with a signal-to-noise ratio S/N = –15 dB
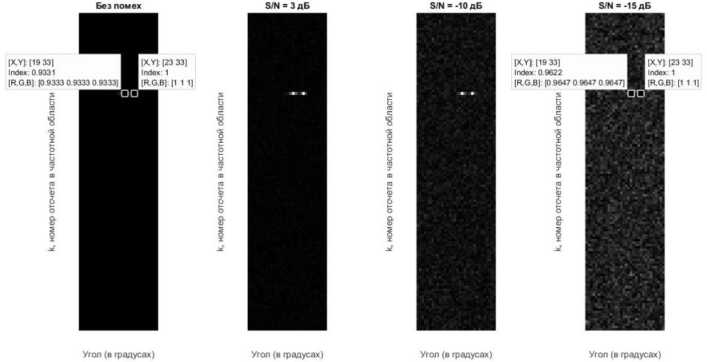
Рис. 7. Двухмерное изображение спектров при различных отношениях сигнал/шум
Fig. 7. Two-dimensional image of spectra at different signal-to-noise ratios правлениях с оценкой их пеленгов. Дальность до целей оценивается по задержке эхо-сигналов относительно зондирующего. В работе показано, что фактически программными средствами возможна многоканальная параллельная обработка ПВС. Работоспособность представленного способа проверена моделированием в пакете MATLAB.
Список литературы Способ обеспечения навигационной безопасности для автономного необитаемого подводного аппарата
- Толл Джеффри. Подводные лодки и глубоководные аппараты. Москва, ЭКСМО, 2004.
- Technology and Applications of Autonomous Underwater Vehicles. Edited by Gwyn Griffitus, Taylor & Francis, London and New York, 2003.
- Агеев М. Р., Касаткин Б. А., Киселев Л. В. и др. Автоматические подводные аппараты. Л., Судостроение, 1981.
- Даджион Д., Мерсеро Р. Цифровая обработка многомерных сигналов. М.: Мир, 1988.
- Finn B. Jensen, William A. Kuperman, Michael Porter, Henrik Schimlal. Computational ocean acoustics. Springer New York, Dordrecht Heidelderg London, 2011, 795. DOI: 10.1007/978-1-4419-8678-8.
- Tianzeng Xu, Lufen Xu. Digital Underwater Acoustic Communications. China Ocean Press, Elsevier Inc., 2017, 290. DOI: 10.1016/C 2014-0-00624-7.
- Waite A. D. Sonar for Practicing Engineers. John Wiley & Sons Ltd., Baffins Lane, Chichester, 2002. 298.
- Солонина А. И. Цифровая обработка сигналов в зеркале MATLAB. СПб.: БХВ-Петербург, 2018. 560.
