Способ обнаружения отказов при экономичном резервировании бортового оборудования беспилотного летательного аппарата

Автор: Волобуев М.Ф., Мальцев А.М., Михайленко С.Б., Уфаев В.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 7 т.9, 2016 года.
Бесплатный доступ
Предложен способ обнаружения факта наступления постепенного отказа в двухканальной резервированной системе. Разработана методика расчета вероятностных характеристик способа и проведена оценка его эффективности на конкретном примере. Предложены рекомендации по выбору параметров способа, которые минимизируют принятие ошибочных решений об отказе системы.
Двухканальная резервированная система, постепенный отказ, порог обнаружения отказа
Короткий адрес: https://sciup.org/146115135
IDR: 146115135 | УДК: 629.7 | DOI: 10.17516/1999-494X-2016-9-7-1059-1067
Way of detection of refusals at economic reservation of the onboard equipment of a unmanned aerial vehicle
A method of detection the occurrence of progressive failure in dual-redundant system is proposed. The design procedure of likelihood characteristics of a way is developed and the estimation of its efficiency on a concrete example is spent. Recommendations for choice parameters of a way which minimize acceptance of erroneous decisions on system refusal are offered.
Текст научной статьи Способ обнаружения отказов при экономичном резервировании бортового оборудования беспилотного летательного аппарата
Наиболее просто реализуем способ обнаружения мгновенных отказов, основанный на контроле по пороговой величине. В [2-5] описаны устройства обнаружения отказов, управления и восстановления работоспособности резервированных систем с использованием контроля по пороговой величине. Данные устройства позволяют непрерывно функционировать двухканальной системе при следующих отказах в одном из каналов: скачки выходных параметров вверх (типа короткого замыкания) или вниз (типа обрыв соединения), а также плавное изменение до максимального или минимального значения, возможного в данной системе. Принципиальным недостатком способа контроля по пороговой величине выступает невозможность обнаружения постепенных отказов.
Цель статьи – разработка способа обнаружения факта наступления постепенного отказа в двухканальной резервированной системе и определение его вероятностных характеристик.
Способ обнаружения факта наступления постепенного отказа
Рассмотрим двухканальную резервированную систему, в которой сигналы с выходов каналов являются случайными некоррелированными процессами. Будем считать, что случайные величины X и Y , наблюдаемые на выходе каналов в текущий момент времени, характеризуются одинаковыми вероятностными распределениями с параметрами: M [ X ] = M [ у ] = m ; M [ ( X - m ) 2 ] = M |^ ( У - m ) 2 ] = ст 2 . Для сигналов Х и У определим диапазон всех физически возможных значений β и диапазон рабочих (номинальных) значений α. Диапазон α располагается внутри диапазона β (α<β) и разбивает его на три поддиапазона: А 1 – соответствует рабочему диапазону α; А 2 – расположен ниже диапазона α; А 3 – расположен выше диапазона α.
Процедура обнаружения факта наступления отказа в двухканальной системе может быть реализована с помощью схемы, представленной на рис. 1.
Обнаружение факта наступления отказа осуществляется в соответствии с критерием
Δ > Δ* – отказ в системе,
Δ ≤ Δ* – система исправна, (1)
где Δ = | X – Y |, Δ* – пороговый уровень обнаружения отказа, Δ ≤ α*.
Методика расчета вероятностных характеристик способа обнаружения факта наступления постепенного отказа
Принятие решения об отказе системы в соответствии с критерием (1) носит вероятностный характер. При этом возможны следующие варианты (исходы), составляющие полную группу несовместных событий:
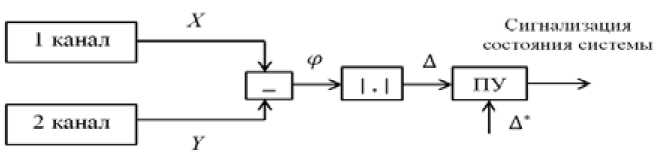
Рис. 1. Схема обнаружения факта наступления отказа в двухканальной резервированной системе
-
1) выходные сигналы X и Y находятся в диапазоне значений А (отказа нет), а модуль их разности Δ не превысил порог Δ* (правильное решение об исправности системы);
-
2) выходные сигналы X и Y находятся в диапазоне значений А 1 (отказа нет), а модуль их разности Δ превысил порог (ложное решение об отказе системы);
-
3) один или оба сигнала X, Y находятся в диапазоне значений А 2 или А 3 (отказ одного или обоих каналов), а модуль разности сигналов Δ превысил порог (правильное решение об отказе системы);
-
4) один или оба сигнала X, Y находятся в диапазоне значений А 2 или А 3 (отказ одного или обоих каналов), а модуль разности сигналов Δ не превысил порог (ложное решение об исправности системы).
Граф состояний системы с возможными исходами процедуры обнаружения отказа представлен на рис. 2, где приняты следующие обозначения: НС – начальное состояние системы; Отк – отказ системы; Исп – исправность системы; ПРО – правильное решение об отказе системы; ЛРИ – ложное решение об исправности системы; ПРИ – правильное решение об исправности системы; ЛРО – ложное решение об отказе системы; P отк – вероятность отказа системы; Р исп – вероятность исправности системы; Р ппотк – вероятность превышения порога в случае отказа системы; Р нпотк – вероятность непревышения порога в случае отказа системы; Р пписп – вероятность превышения порога в случае исправности системы; Р нписп – вероятность непревышения порога в случае исправности системы; Р прос – вероятность правильного решения об отказе системы; Р лрис – вероятность ложного решения об исправности системы; Р прис – вероятность правильного решения об исправности системы; Р лрос – вероятность ложного решения об отказе системы.
Введем описание исправного S исп и неисправных состояний системы S отк( i , j ):
5 исп = X е А л Y е A ,
S отк ( i,j ) = X S A Л Y S A j ,i,J = 1 , 3.
Причем S отк(1,1) = Ø, так как этот случай соответствует исправному состоянию S исп. Вероятности введенных состояний равны:
Р исп = J ® X ( X ) - J ® Y ( Y ) dYdX , А 1 A 1
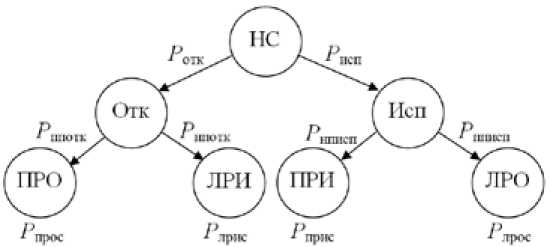
Рис. 2. Граф состояний двухканальной резервированной системы
P OTK ( M ) - J ® X ( X У J ® Y ( Y ) dYdX , i,j 1 , 3, АiAj (3)
где to X ( X ) , to F ( Y ) - плотности вероятности случайных величин X и Y.
В случае исправной системы (состояние S исп ) возможно правильное решение об её исправности или ложное решение об её отказе, вероятности которых Р прис , Р лрос равны:
P = P • P Р = Р • P прис исп нписп , лрос исп пписп , где Рпписп, Рнписп – вероятности превышения и непревышения величиной Δ порога Δ* в случае исправности системы;
Л
^нписп = J ®л(Л / ^1,4) d Л , " = I ®Л(Л / 4,4) d Л , где од (А/4’4) — условная плотность вероятности величины А при попаданииXи Yв диапазон А1.
В случае неисправной системы (состояния S otk ( i,j ) ,i,j = 1 , 3 ) возможны правильные решения об её отказе или ложные решения об её исправности, вероятности которых P ( i,j ) , '.
прос ( i,j ) отк ( i,j ) ™ ( i,j ) , лрис ( i,j ) ™ ( i,j ) нпотк ( i,j ) , i,J , 3 (6)
где Р ппотк ( i,j ) , Р нпотк ( i,j ) вероятности превышения и непревышения величиной А порога А * в случае отказа системы;
*
Р ппотк i,jj ) = ) « л ( А / А . ,А ; ) d А , Р нпотк ( i,j ) = j . Д ( А / А„А , ) d А, i,j = 1 , 3 (7)
А * А min ( i,j )
где - /A i ,A j ) - условная плотность вероятности величины А при попадании X и Y в диапазон A i и A j соответственно, а A m „ ( i,j ) , A max ( i,j ) - минимальные и максимальные значения величины Δ в ситуации S отк . С учетом всех состояний отказа системы получаем вероятности правильного решения об отказе P прос и ложного решения об исправности P лрис :
пр I"1 ^ " 1 пр ^ лр
Исходы, соответствующие правильным и ложным решениям о состоянии системы, могут быть объединены в благоприятный и неблагоприятный исходы с соответствующими вероятностями правильного P ПР и ложного P ЛР решений:
р =р +Р р =р +Р
1 ПР 1 прис 1 прос , 1 ЛР 1 лрис + 1 лрос •
Поскольку благоприятные и неблагоприятные исходы являются противоположными событиями, то их вероятности связаны соотношением р +Р =1
1 ПР 1 ЛР 1 •
Выбор порога Δ* следует осуществлять, исходя из минимизации PЛР и максимизации
A *pt, = A rg max Р ПР (A * ) = A rg min Р ЛР (A * ) .
A * e [ 0 , a ] A * e [ 0 , a ]
Пример расчета вероятностных характеристик способа обнаружения факта наступления постепенного отказа
Рассмотрим случай, когда случайные величины X и Y распределены по равномерному закону в диапазоне возможных значений β, причем зона α расположена симметрично относительно математических ожиданий X и Y . При этом значения β выбираем, исходя из заданной веро- ятности безотказной работы каждого из каналов Рк в соответствии с выражением Рк = —, что в обусловлено равномерным законом распределения выходных величин X и Y. Для определения конечных исходов необходимо знать условные плотности вероятностей ®д (д /Ai,Aj) i, j = 1,3, которые могут быть определены по методике, предложенной в [6]. Для расчетов по методике [6] требуются условные плотности вероятностей случайных величин X и Y при условии их нахождения в диапазоне Ai,i = 1,3. Очевидно, что это будут равномерные плотности вероятностей и их определение тривиально.
В силу симметрии рассматриваемого случая справедливы следующие соотношения:
®д(Д / А,А2 ) = од(Д / А1,А3 ) = од(Д / А ,A1 ) = юд(Д / А,A1), д / А2 ,А ) = д / АЛ), . д / АЛ ) = №д(Д / АЛ ).
Кроме того, нет необходимости определять условные плотности вероятностей <у д ( А /А ^ ,А з ) и Ша ( А /А 3 ,А ) , так как при одновременном попадании случайных величин X и Y в диапазоны A 2 и A 3 ( A 3 и A 2 ) соответственно величина А всегда будет больше порога А * < а , т. е. справедливо
Р (2,3) = Р (3,2) = 0,Р (2,3) = Р (3,2) = 1.
нпотк \ ’ 7 нпотк \ * , ппотк \ * 7 ппотк \ * 7 "
Таким образом, достаточно определить три условные плотности вероятностей ® д ( А /Ai,A j ) :
У д ( А / A i ,A i ) =<
2- ( a —А ) a 2
А<0
0<А<а , ® д ( А / А 2 ,A 2 ) =!
А>а
4- ( р—а —2-А ) ( в — а ) 2
д< 0
о<д< ta ,
^—a
А>--- 2
2-А
® Д ( А / А 1 ,А 2 ) = <
в- а - а 2 l ^ r ^ L в-а - а2 в+а -2-А в-а -аг
Д< 0
0<А< - а ..
—<А<а в+а а<А<---
А> ^а
В результате расчетов с использованием выражений (3)-(8), (12)-(15) определены аналитические выражения для вероятностей конечных исходов:
2 ■ a -A * -
P npuc
= <
a
l в
в
P POC
Л * 2
A
— 0a
a 2 -2■ a-A* +A * 2
A * = a
P
, лрос
= <
в
0 < A * < a
A = a
Р 2 - а 2 - 2 - Р-А* + 2 - а -А * в 2 0 <А <а
P
, лрис
2 - Р -А * - 2 - а -А * Р
0 <А * ■
.
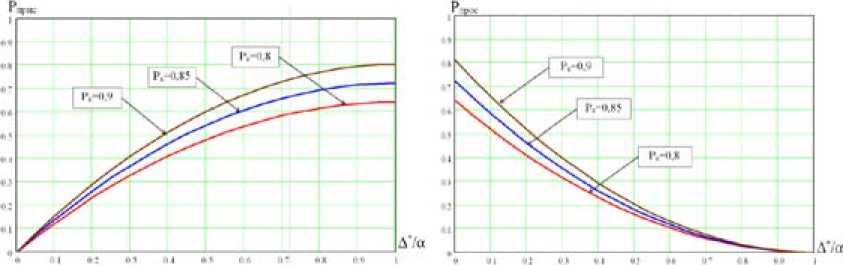
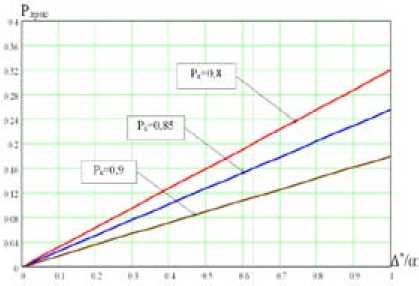
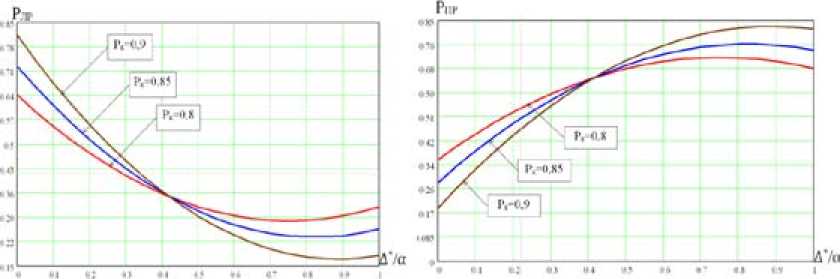
С использованием выражений (16), (17) получены графические зависимости вероятностей
• ложных и правильных решений, от отношения порога к рабочему диапазону А / и фиксиро- а ванного значения Рк = —, представленные на рис. 3, 4. Р
Проведя вычисления благоприятных и неблагоприятных решений с использованием выражения (9), получим графические зависимости, представленные на рис. 5.
Из приведенных на рис. 5 зависимостей видно, что существует оптимальное значение порога А = А , которому соответствует максимальное значение вероятности правильных ре- opt *
шений и минимальное значение ложных решений. Причем значения А opt, РПР (A opt), РПР (A opt) а зависят от соотношения :
в
I . • а I I Л - а
.
= Arg тахР ПР \ А , — 1 = АrgminP ЛР\ А ,— k Р' к Р.
А * е [ 0 , а ] А * е [ 0 , а ]
Заключение
В классических резервированных системах выбор оптимального значения порога Δ* осуществляется из условия равенства вероятности ложного решения об отказе системы нулю
а б
Рис. 3. Зависимости вероятности правильного решения об исправности системы (а) и вероятности ложного решения об отказе системы (б) от отношения ^/ при фиксированных Рр а
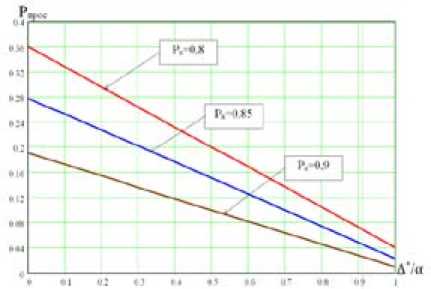
Рис. 4. Зависимости вероятности правильного решения об отказе системы (а) и вероятности ложного
б
решения об исправности системы (б) от отношения
*
А а при фиксированных Р к
а б
Рис. 5. Зависимости вероятностей ложных решений (а) и правильных решений (б) от отношения А * / при фиксированных Р к
(Δ* = α), так как в многоканальных резервированных системах (число каналов 3 и более) ложное решение об отказе системы приводит к исключению из дальнейшей работы исправного канала. В двухканальных резервированных системах, где факт обнаружения отказа является сигналом для подключения других устройств проверки, необходимо оптимизировать порог Δ* таким образом, чтобы минимизировать вероятность принятия ложного решения об исправности системы при фиксированном максимально допустимом значении вероятности принятия ложного решения об отказе системы.
Выбор значения порога Δ* в двухканальных резервированных системах следует с учетом
а
отношения в, что обеспечит максимум вероятности правильных решений и минимум вероят- ности ложных решений о состоянии резервированной системы.
Список литературы Способ обнаружения отказов при экономичном резервировании бортового оборудования беспилотного летательного аппарата
- Волобуев М.Ф., Замыслов М.А., Соколов И.В. Способ экономичного резервирования бортовых систем БЛА на основе нечеткой логики. Сб. статей II Всероссийской НПК «Академические Жуковские чтения» «Современные проблемы и перспективы развития комплексов авиационного оборудования». Воронеж: ВУНЦ ВВС «ВВА», 2015, 39-43
- Шевцов Г.А., Шеремет Е.М. Логическое резервирование. Львов: Изд-во Львов. ун-та. 1973, 136 с. .
- Устройство управления резервированной с помощью мажоритарных элементов системой. Патент ФИПС РФ № 2451995 от 02.12.2011 г.
- Устройство обнаружения отказов в резервированной системе. Патент ФИПС РФ №2487389 от 20.06.2012 г.
- Устройство восстановления работоспособности системы резервированной с помощью мажоритарных элементов. Патент ФИПС РФ № 2493586 от 15.08.2012 г.
- Венцель Е.С., Овчаров Л.А. Прикладные задачи теории вероятностей. М.: Радио и связь. 1983, 416 с.
