Способ оценки дальности до подводного объекта по кривизне волнового фронта в условиях воздействия коррелированного шума

Автор: Шостак C.В., Стародубцев П.А., Алифанов Р.Н.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 2 т.12, 2019 года.
Бесплатный доступ
В статье представлены результаты обоснования нового способа оценки дальности до любого подводного объекта или физического явления по кривизне волнового фронта в условиях воздействия на измерительную гидроакустическую систему коррелированного шума. При этом основной задачей пространственно-временной обработки сигналов такой системой является анализ результирующего волнового поля для определения положения пространственного объекта, который представлен точечной моделью отражающего (излучающего) объекта, который создает в однородной безграничной среде сферическую волну. Такая модель основная для анализа сигналов реальных морских объектов, так как эти объекты во многих случаях хорошо описываются моделью в виде некоторого набора «блестящих» точек. Кривизну волнового фронта можно использовать для определения дальности до объекта, когда он находится в зоне Френеля относительно приемной антенной решетки, что позволяет проводить независимую обработку по временной и пространственной координате.
Кривизна волнового фронта, коррелированный шум, блестящие точки, зона френеля, временные и пространственные координаты
Короткий адрес: https://sciup.org/146281178
IDR: 146281178 | УДК: 534.01 | DOI: 10.17516/1999-494X-0122
Method for assessing the distance to the underwater object of the curvature of the wave front in the conditions of exposure to correlated noise
The article presents the results of the substantiation of a new method for estimating the distance to any underwater object or physical phenomenon based on the curvature of the wave front in terms of the impact on the measuring sonar system of correlated noise. At the same time, the main task of space-time signal processing is the analysis of the resulting wave field to determine the position of a spatial object, which is represented by a point model of a reflecting (radiating) object, which creates a spherical wave in a homogeneous unlimited medium. Such a model is fundamental for analyzing signals from real sea objects, since in many cases these objects are well described by the model in the form of a certain set of “bright” points. In this case, the curvature of the wave front can be used to determine the distance to the object when it is in the Fresnel zone relative to the receiving antenna array, which allows for independent processing along the time and spatial coordinates.
Текст научной статьи Способ оценки дальности до подводного объекта по кривизне волнового фронта в условиях воздействия коррелированного шума
Вместе с тем стремление разработчиков ИГС к увеличению дальности их действия и повышению разрешающей способности по угловым координатам при наблюдении за ПО и связанная с ними тенденция к увеличению размеров антенн приводят к тому, что в ряде случаев пренебрегать кривизной волнового фронта в пределах раскрыва приемной антенны практически невозможно.
Основная часть
С точки зрения кривизны волнового фронта, обрабатываемого ПВС, всю область пространства, где могут находиться источники сигналов, можно разделить на три зоны, отсчитываемые относительно приемной антенны [2]:
-
1) ближнюю, когда r б 2 з ≤ 0,38 L 3 λ ,
где r – дальность объекта; L – габаритный размер антенны; λ – длина волны;
2L2
-
2) зону Френеля, когда r бз < r зф < λ L ;
2L2
-
3) дальнюю зону, когда r дз ≥ .
В зависимости от нахождени λ я ПО в одной из указанных зон в ИГС применяется соответствующая модель формирования ПВС.
Рассмотрим новое математическое решение для оценки дальности до ПО по кривизне волнового фронта (ВФ), находящегося в зоне Френеля, на основе анализа пространственной частоты.
Примем в качестве модели ПО точечную модель отражающего (излучающего) объекта, который создает в однородной безграничной среде сферическую волну. Такая модель является основной для анализа ПВО сигналов реальных морских объектов, так как эти объекты во многих случаях хорошо описываются моделью в виде некоторого набора «блестящих» точек [3].
Соотношения, справедливые для точечного объекта, применимы также и для малоразмерных объектов при условии, что их величины много меньше элемента разрешения системы ПВО сигналов [1–3].
Для теоретического описания процесса формирования ПВС в зоне Френеля антенной решетки построим графическую модель (рис. 1).
На рис. 1 r - дальность, r o - дальность объекта, m - номер элемента АР, - 0,5 ( M - 1 ) < m < 0,5 ( M - 1 ) ; M – число элементов, d – расстояние между элементами АР, n – номер отсчета во временной области, n = 0... N - 1, N - число отсчетов.
Так как зондирующий сигнал предполагается гармоническим, то ПВС в m-м элементе АР определяется выражением s (m, n ) = a • exp j 2nfо I n
c
r 2 + ( md ) 2
f
a • exp
j2 n f 0 n
V
г f d m ro 1 + u m c У V ro
f‘ где a - амплитуда сигнал; f0 = — fд
- нормированная частота; f‘ - частота сигнала; fg - частота дискретизации; m – номер элемента в антенной решетке (АР).
Для дальнейших рассуждений значение амплитуды не играет существенной роли, поэтому будем рассматривать ПВС вида
5 ( m , n ) = exp
j2nf0 n - r0 c
Модель ПВС в зоне Френеля может быть представлена следующим образом [2]:
■
(
1 | dm |
I 1 + 2 V ^
V //
r
5 (m, n ) = exp j2nf0 n - o-_ V
= exp ( j2.Л f • n ) • exp - j 2 nu • m 2 + j^, 00
fo • d2 f Г 2n где uо = -0---; ф = 2nf о • -° = kо • ro - начальная фаза; kо = — - волновое число; Xo - длина вол-
2 r o c c A)
ны.
Как видим из выражения (3), ПВС факторизуется в виде произведения временной и пространственной составляющей и имеет вид [4]
s ( m , n ) = s 1 ( n ) • s 2 ( m ) ,
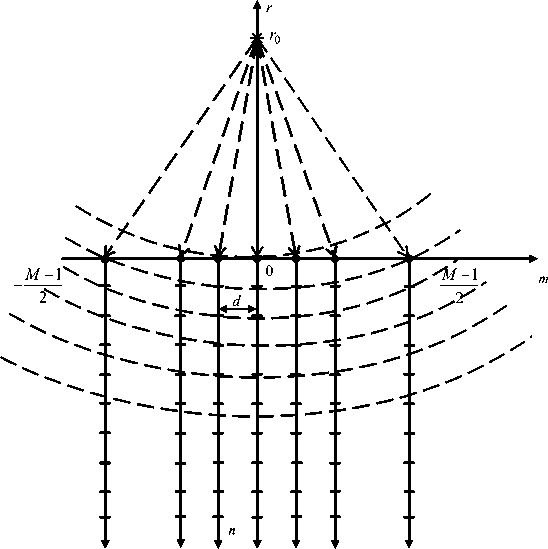
Рис. 1. Модель формирования ПВС в зоне Френеля антенной решетки
Fig. 1. Model of the formation of space-time signal in the Fresnel zone of the antenna array
где 5 1 ( n ) = exp ( j 2 n f о • n ) ; 5 2 ( m ) = exp (- ju о • m 2 + j V ) .
Причем, как видим из (3) и (4), информацию о дальности несет пространственная составляющая s 2 ( m ).
Полагая, что ПО малоподвижен, и учитывая, что 5 1 ( n ) = exp ( j 2 пf 0 • n ) , для выделения составляющей 5 2 ( m ) умножим 5 ( m, n ) на 5 * ( n ) , где «*» - знак комплексного сопряжения;
5 1 ( m ) = 5 1 * ( n ) • 5 ( m , n ) = exp ( - j 2 ^И о • m 2 + ]ф ) .
Выражение для s (m) включает квадратичную пространственную переменную m2, что 2, существенно усложняет обработку такого сигнала для выделения из него величины r0. Для упрощения обработки воспользуемся следующим приемом: сдвинем s2 (m) на p отсчетов и перемножим с исходным комплексно сопряженным
*( 2\
Z ( m ) = 5 2 ( m - p \ 5 2 ( m ) = exp ( j 2 n ^ 2 u о p • m - j 2 n u о • p ) =
= exp ( j 2 nv 0 • m + jY ) , pd 2
где v 0 = 2 p • u 0 = ——; Y = - 2 n u 0 • p - начальная фаза. Л) г о
В результате проделанных преобразований получим гармонический сигнал частоты v0 и задача определения дальности до ПО свелась к определению пространственной частоты v , 0, откуда [5]
pd 2
/Q = .
^v 0
В настоящее время известно большое количество методов оценки частоты гармонического сигнала [6]. Для примера рассмотрим метод дискретного преобразования Фурье (ДПФ) для оценки v 0
0 5(M 1)
Z ( v ) = S 2 ( m ) . exp I- j ^v • m
-0,5( M-1)+ p
0,5( M-1) (2
S exp ( j 2 n v 0 • m + j V ) ■ exp I - j-v - m
-
-0,5( M-1)+pV
0 5 ( M - 1 )
= exp ( j v ) • S
- 0,5 ( M - 1 )+ p
2 n
exp M ("- M ' v 0 )' m
.
Модуль выражения (8) имеет максимальное значение, когда v = M ∙ v 0. И тогда согласно выражению (7) [7]
pd 2 pd 2 • M ---=------
-
A) v 0 A) v
Приведенные выше рассуждения не учитывают влияние окружающей среды на формирование ПВС.
Однако в реальной обстановке ПВС s (m, n) испытывает искажающее воздействие окружающей среды в виде аддитивной составляющей ω (m, n), куда отнесем шум элементов АР и помехи гидроакустического канала x (m, n ) = s (m, n) + ®(m, n), (10) где ω (m, n) – стационарный гауссовский шум с нулевым средним и корреляционной матрицей Cww = E[W(m,n)• WH (m,n)];«н»- гильбертово сопряжение, W(m, n)- вектор шума.
Представим сформированный ПВС АР в векторно-матричном виде [8]
|
" x ( - 0,5 ( M - 1 ) ,0 ) M x ( - 0,5 ( M - 1 ) , ( N - 1 )) ■L x ( 0,0 ) M x ( 0, N - 1 ) ■L x ( 0,5 ( M - 1 ) ,0 ) M x ( 0,5 ( M - 1 ) , N - 1 ) 144442X 44443 |
I S 1 ( 0 ) 0 L 0 । M M M S 1 ( N - 1 ) 0 ^ 0 0 S 1 ( 0 ) L 0 M M M 0 s , ( N - 1 ) L 0 0 0 ^ s 1 ( 0 ) M M M _ 0 0 L s j ( N - 1 )_ 14444444244444443 H |
~S 2 ( - 0,5 ( M - 1 ))1 M S 2 ( 0 ) M [ S 2 ( 0,5 ( M - 1 ) 4 ] θ |
® ( - 0,5 ( M - 1 ) ,0 ) M ® ( - 0,5 ( M - 1 ) , N - 1 ) ■L * M " ) „ ( « . N - 1 ) ® ( 0,5 ( M - 1 ) ,0 ) M 1 ( 0,5 ( M - 1 ) , N - 1 3 W |
( ) |
Перепишем выражение (11) в более компактном виде
X = H • 0 + W ,
где X – ( MN × 1) вектор ПВС; H – ( MN × M ) известная матрица, формируется в приемнике; θ – ( M × 1) вектор оцениваемых параметров; W – ( MN × 1) вектор шума.
Требуется получить несмещенную оценку вектора θ ˆ с минимальной дисперсией. Для получения такой оценки воспользуемся теоремой Гаусса-Маркова [9, 10], которая утверждает, что если данные представляются линейной моделью вида (11), в которой шумовой вектор W с произвольной плотностью функции распределения, нулевым средним и известной ковариационной матрицей C ww =E I W • W I , «н» - операция гильбертово сопряжение, то лучшая несмещен- [ ]
ная оценка в классе линейных оценок имеет вид
-1
9 ■ HHС” ' н ) ■ " С™ X . (13)
При этом минимальная дисперсия оценок дается выражением var(’m )= (HH CW.-H)
- 1
mm
Выражение [A] mm означает выделение диагональных элементов квадратной матрицы A .
Если шумовая составляющая W представляется белым гауссовским шумом с ковариационной матрицей σ2 ∙ I , где I – единичная матрица, σ2 – дисперсия, то выражение (13) и (14) преобразуется соответственно [5, 6] в
0 = ( H H xH ) . H H . X (15)
и var(<>m )" »2
( H « . H ) —1
mm
Выполняя вычисления в соответствии (13) или (15), фактически мы получим оценки s2 (m) с минимальной дисперсией. Дальнейшие расчеты для получения окончательного результата, т.е. определения дальности до объекта, необходимо проводить в соответствии с выражением (6), (8), (9).
Заключение
Как показано в изложенных материалах, кривизну волнового фронта ПВС можно использовать для определения дальности до ПО, когда он находится в зоне Френеля относительно приемной АР. Модель образования ПВС (3) позволяет факторизовать его на временную и пространственную составляющие (4), что позволяет проводить независимую обработку по временной и пространственной координате. Кроме того, это дает возможность представить сформированный на АР ПВС реальный сигнал в виде линейной векторно-матричной модели (11) и применить хорошо известные теоремы минимизации дисперсии оценок (13), (15). Однако обработка по пространственной координате серьезно осложняется наличием квадратичной переменной (5). Введенный прием сдвига и перемножения позволяет представить сигнал по пространственной координате в виде гармонического, пространственная частота которого зависит от дальности до ПО (6). В результате проделанных операций задача определения дальности ПО в зоне Френеля свелась к оценке пространственной частоты (8).
Список литературы Способ оценки дальности до подводного объекта по кривизне волнового фронта в условиях воздействия коррелированного шума
- Гусев В.Г. Системы пространственно-временной обработки гидроакустической информации. Л.: Судостроение, 1988. 262 c.
- Кремер И.Я. Пространственно-временная обработка сигналов. М.: Радиосвязь, 1984. 224 с.
- Бурдик В.С. Анализ гидроакустических систем. Л.: Судостроение, 1988 391 с.
- Марпл С.Л. Цифровой спектральный анализ и его приложения. М.: Мир, 1990. 265 с.
- Graybill F.A. Theory and Application of the Linear Model, Duxbury Press, North Scituate, Mass., 1976. 704 p.
- Рао С.Р. Линейные статистические методы и их применения. Пер. с англ. под ред. Линника. М.: Наука, 1968 547 p.
- Больбасова Л.А. Адаптивная коррекция атмосферных искажений оптических изображений на основе искусственного опорного источника. М.: ФИЗМАТЛИТ, 2012. 126 c.
- Канев Ф.Ю., Лукин В.П. Адаптивная оптика. Численные и экспериментальные исследования. М.: Изд. Института оптики атмосферы СО РАН, 2005, 250 с.
- Воронцов М.А., Кудряшов А.В., Шмальгаузен В.И. Гибкие зеркала для адаптивных систем атмосферной оптики. Теоретический анализ. Изв. вузов: Радиофизика, 27(11), 1419-1430.
- Шелдакова Ю.В., Кудряшов А.В., Рукосуев А.Л., Черезова Т.Ю. Использование гибридного алгоритма управления биморфным зеркалом для фокусировки светового излучения. Оптика атмосферы и океана, 2007, 20(4), 380-383.
