Способ увеличения чувствительности и динамического диапазона индуктивных датчиков линейных перемещений

Автор: Тиньгаев Владимир Сергеевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Общие проблемы машиностроения
Статья в выпуске: 4-2 т.15, 2013 года.
Бесплатный доступ
В статье рассматривается способ увеличения чувствительности и динамического диапазона индуктивных датчиков линейных перемещений в перспективных ракетоносителях. Приведена графическая иллюстрация работы индуктивного датчика линейных перемещений.
Математическое моделирование, преобразователь линейных перемещений, индуктивный датчик линейных перемещений
Короткий адрес: https://sciup.org/148202299
IDR: 148202299 | УДК: 681.586
Method of increasing the sensitivity and dynamic range of linear movements inductive sensors
In article the method of increasing the sensitivity and dynamic range of linear movements inductive sensors in perspective rocket carriers is considered. The graphic illustration of operation the linear movements inductive sensor is given.
Текст научной статьи Способ увеличения чувствительности и динамического диапазона индуктивных датчиков линейных перемещений
Конструктивно (рис. 1) датчик состоит из статора 1 , катушек 2 и 3 с обмотками возбуждения магнитного поля и обмотками измерения магнитного поля, намотанными на каркасы 4 и 5 , установленных на втулке 6 , выполненной в форме стакана из немагнитного материала, внутри которой перемещается якорь 7. Катушка 2 содержит первую обмотку возбуждения магнитного поля и первую обмотку измерения магнитного поля, намотанные на каркас 4 . Катушка 3 содержит вторую обмотку возбуждения магнитного поля и вторую обмотку измерения магнитного поля, намотанные на каркас 5 . Боковая поверхность якоря 7 содержит последовательно расположенные на ферромагнитной основе части 8 , 9 и 10 . Первая часть 8 боковой поверхности якоря начинается от торца якоря, вторая часть 9 боковой поверхности якоря начинается после первой части 8 , а третья часть 10 боковой поверхности якоря, соответственно, после второй части 9 . Длина всех частей соизмерима с осевой длиной катушек 2 и 3 . Обмотки для измерения интенсивности магнитного поля ИДЛП могут быть выполнены как в виде непрерывной обмотки, так и в виде двух полуобмоток, соединенных встречно – последовательно (дифференциальный датчик линейного перемещений), а отдельные части 8 , 9 и 10 боковой поверхности якоря также выполняют соизмеримыми. Первая часть 8 и третья часть 10 боковой поверхности якоря выполнены из материала с высокой электропроводностью (медь, серебро). Вторая часть 9 боковой поверхности якоря выполнена из материала с высокой магнитной проницаемостью и низкой электропроводностью. Втулка 6 выполнена из немагнитного материала и может быть металлической (например, из нержавеющей стали 12Х18Н10Т). Перемещение объекта измерения (например, клапана) из внутренней полости 11 передаётся на якорь, который перемещается через открытый торец втулки 6 , герметично соединенной с внутренней полостью рабочего органа (клапана) 11 .
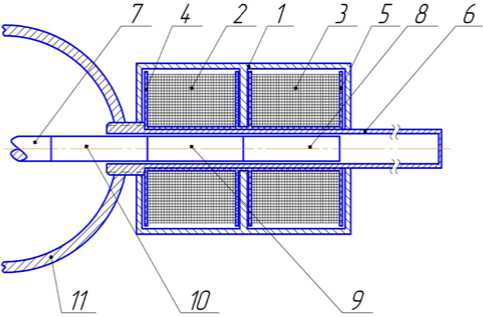
Рис. 1. Индуктивный датчик линейного перемещения
Предлагаемое устройство работает следующим образом. При питании обмоток возбуждения магнитного поля переменным током в обмотках измерения магнитного поля наводится электродвижущая сила переменного тока, амплитуда которой пропорциональна величине магнитного потока, пронизывающего обмотки измерения магнитного поля, связанная с линейным смещением якоря относительно начального (нулевого) положения. На рис. 2а изображены зависимости индуктивностей L1 и L2 катушек 2 и 3 ИДЛП при осевом смещении составного якоря, а также аналогичные зависимости для датчика линейных перемещений со сплошным ферромагнитным якорем (рис. 2б). Изменения разности индуктивностей L1 и L2 катушек 2 и 3 при перемещениях якоря изображено на рис. 2в.
В положении I, как показано на рис. 2а, 2б, составной якорь и сплошной ферромагнитный якорь находятся в начальном положении и не взаимодействует с магнитным полем катушек 2 и 3 . Собственные индуктивности L1 и L2 катушек 2, 3 , соответственно, (без влияния якоря в исходном положении I) примем одинаковыми и равными L 0 . Для упрощения рассмотрения примем также, что обмотка возбуждения и обмотка измерения магнитного поля для катушки 2 имеют сильную электромагнитную связь (коэффициент связи примем равной единице), их индуктивности L1 одинаковы и зависят от электромагнитных свойств материала находящихся в них частей якоря. Аналогично примем, что и для катушки 3 обмотки возбуждения и обмотки измерения магнитного поля так же имеют сильную электромагнитную связь (коэффициент связи примем равной единице), а их индуктивности L2 так же равны между собой и также зависят от электромагнитных свойств материала находящихся в них частей якоря. При перемещениях якоря из положения I в положение II на расстояние H/2, равное длине катушек 2 и 3 , индуктивность L1 в предлагаемом устройстве падает (для упрощения примем линейный закон изменения индуктивностей) и в положении II якоря становится равной L1=L аminII т.к. в катушке 2 находится часть 8 якоря, которая обладает высокой электропроводностью и уменьшает индуктивность L1, как это показано на рис. 2а для положения II . При этом индуктивности
L2 катушки 3 не изменяются и остаются равными L2=L 0 .
Крутизна позиционной характеристики датчика линейных перемещений на участке, расположенном между позицией I и позицией II якоря, определяется как:
V
(L 2 ail - L1 ail ) - (L 2 al — L1 d )H/2
Здесь L1 аI , L2 аI – индуктивности катушек 2 и 3 в позиции I. L1 аII , L2 аII – индуктивности катушек 2 и 3 в позиции II; H – перемещение.
Учитывая, что индуктивность L1 катушки 2 предлагаемого устройства в позиции I и индуктивность L2 катушки 3 в позициях I и II якоря принимает значение собственной индуктивности L 0а (т.к. в указанных позициях катушки не содержат материал якоря), принимаем L1 аI = L1 аII = L2 аII = L 0а . Аналогично принимаем L1аII=Lаmin т.к. в катушке 2 находится первая часть 8 боковой поверхности якоря обладающая высокой электропроводностью. Подставляя принятые значения индуктивностей катушек в позициях I и II якоря в выражение (1) получаем:
2 ( L 0
а min
H
При перемещениях якоря из положения II в положение III индуктивность катушки 2 увеличи-
вается от L1аII= Lаmin до L1 аIII =Lаmax, т.к. в катушку 2 переместится ферромагнитная часть 9 составного якоря, а его часть 8, которая обладает высокой электропроводностью, переместится в катушку 3. Поэтому индуктивность катушки 3 уменьшается от
L2аII= L0а до L2а III
L а min .
Крутизна позиционной характеристики датчика линейных перемещений на участке расположенном между позицией II и позицией III якоря определяется как:
S a ( II ... III )
= 2
( L 2 alii L 1 alii ) ( L 2 ail L 1 ail
H /2
а min a max 0
H
При перемещениях якоря из положения III в положение IV индуктивность катушки 2 уменьшается с L1 аIII =L а max до L1 аIV =L а min , т.к. из катушки 2 ферромагнитная часть 9 удаляется, и в катушку 2 вдвигается электропроводящая (медная) часть 10 составного якоря, при этом индуктивность катушки 3 увеличивается с L2 аIII =L а min до L2 аIV =L аmах , так как часть 8 якоря, обладающая высокой электропроводностью, удаляется из катушки 3 , а в катушку 3 перемещается ферромагнитная часть 9 составного якоря. Крутизна позиционной характеристики устройства на участке, расположенном между позицией III и позицией IV , определяется как:
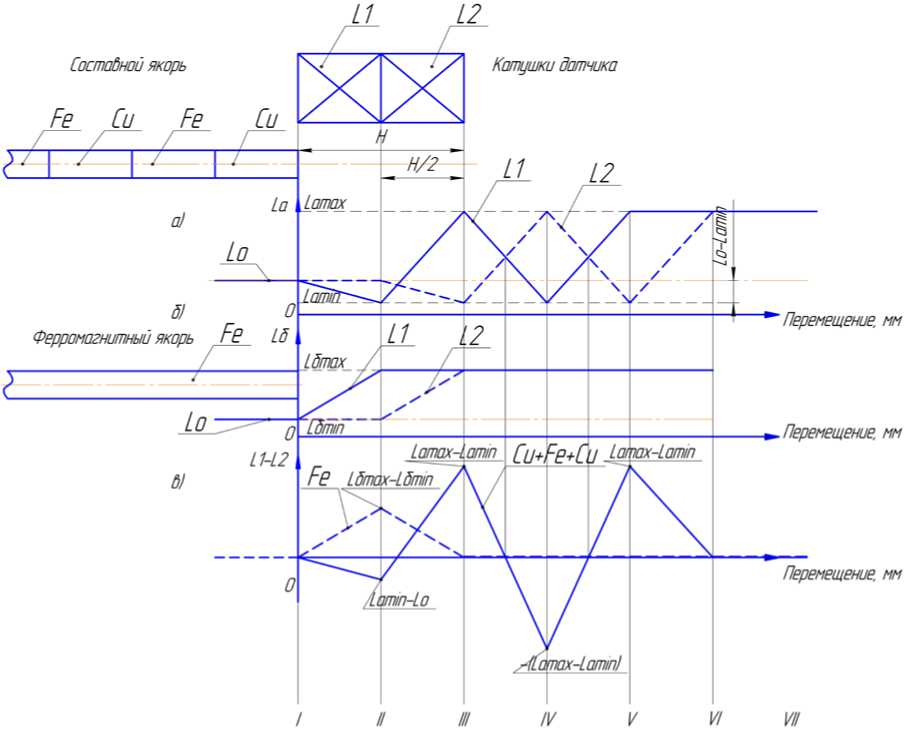
Рис. 2. Графическая иллюстрация работы датчика
(Fe – известное устройство, Cu+Fe+Cu – предлагаемое устройство)
Sa ( III ... IV )
( L 2 aIV L1 aIV ) ( L 2 gill L1 gill )
H /2
4 L а max
La min
H
При перемещениях якоря из положения IV в положение V индуктивность катушки 2 увеличивается с L1 аIV =L а min до L1 аV =L а mах т.к., в катушку 2 перемещается ферромагнитная часть 9 якоря, а часть 10 якоря, которая обладает высокой электропроводностью, перемещается в катушку 3 , при этом индуктивность катушки 3 уменьшается с L2аIV =L а max до L2 аV =L а min , так как ферромагнитная часть 9 якоря удаляется из катушки 3 , а часть 10 якоря, обладающая высокой электропроводностью, перемещается в катушку 3 . Крутизна позиционной характеристики датчика линейных перемещений на участке, расположенном между позицией IV и позицией V , определяется как:
S _ ( L 2 aV L^ aV )-( L 2 aIV — L 1 aIV ) _ a ( IV "V ) H /2 (5)
_ 4 La min La max
H
содержится ферромагнитная основа якоря. Индуктивность катушки 3 увеличивается с L2аV =Lа min до L2 аVI =L аmах , потому что ферромагнитная основа якоря перемещается в катушку 3 . Крутизна позиционной характеристики устройства на участке, расположенном между позицией V и позицией VI , определяется как:
2 L а max
( L 2 aVI L 1 aVI ) ( L 2 aV L 1 aV )
H /2
a min
H
При перемещениях якоря из положения V в положение VI индуктивность катушки 2 не изменяется и равна L1 аV =L а max , т.к. во всей катушке 2
В положении VII и далее индуктивности L1, L2 не изменяются и равны Lаmax.
На рис. 2в изображено изменение разности индуктивностей L1-L2 датчика линейных перемещений при перемещениях якоря в виде сплошного ферромагнитного материала, выполненного в соответствии с прототипом. В исходном положении I сплошной ферромагнитный якорь находится вне магнитного поля катушек 2 и 3 (рис. 2б), поэтому индуктивности катушек 2 и 3 принимают значения собственной индуктивности L 0б , а именно L1 бI =L2 бI = L 0б . Разность индуктивностей L1 - L2 катушек 2 , 3 равна нулю. При перемещениях якоря из положения I в положение II индуктивность катушки 2 увеличивается от L1 бI = L 0 до L1 бII =L б ma x .
Так как в катушку 2 переместится ферромагнитный якорь (для упрощения примем линейный закон изменения индуктивностей), то разность индуктивностей L1 - L2 в положении II становится равной L бmax -L 0 . Крутизна позиционной характеристики устройства на участке, расположенном между позицией I и позицией II , определяется как:
V
-2
L б max II L 0
H
При перемещениях якоря из положения II в положение III индуктивность катушки 2 больше не изменяется и остаётся равной L бmax . Индуктивность катушки 3 увеличивается и в положении III становится равной Lбmax , т.к. в катушках 2 и 3 находится ферромагнитный якорь. Крутизна позиционной характеристики устройства на участке, расположенном между позицией II и позицией III , определяется как:
= 2
I, - „ вmaxIII 0
H
Для сравнения свойств предлагаемого устройства с известным найдём отношение W крутизны их позиционных характеристик, для чего поделим крутизну S а(III…IV) характеристики предлагаемого устройства на участке характеристик между позициями III и IV на крутизну S в(II…III) характеристики известного устройства между позицией II и позицией III:
W =
4 а max a min H
L -
2 в max III 0 II
H
L max
—
L min
max L 0
Учитывая, что L min < L 0 видим, что отношение W > 2. Таким образом, крутизна позиционной характеристики предлагаемого устройства больше, чем у известного более, чем в 2 раза.
Выводы: увеличение чувствительности датчика линейных перемещений происходит за счет того, что якорь выполнен составным в виде частей с различными электромагнитными свойствами, чередующихся в осевом направлении таким образом, что части с высокой магнитной проницаемостью и низкой электропроводностью чередуются с частями, обладающими высокой электропроводностью и низкой магнитной проницаемостью, а линейные размеры составных частей соизмеримы с осевыми размерами катушек.
Список литературы Способ увеличения чувствительности и динамического диапазона индуктивных датчиков линейных перемещений
- Тиньгаев, В.С. Аппроксимация характеристик индуктивных датчиков линейных перемещений с помощью модифицированной функции Гаусса с разностным аргументом первого порядка/В.С. Тиньгаев, С.А. Матюнин, В.А. Медников//Вестник Самарского государственного аэрокосмического университета. 2011. №7 (31). С. 77-81.
- Тиньгаев, В.С. Моделирование позиционных характеристик индуктивных датчиков линейных перемещений модифицированными функциями Гаусса с разностным аргументом/В.С. Тиньгаев, С.А. Матюнин, В.А. Медников, В.Г. Мадриченко//Известия Самарского научного центра Российской академии наук. 2012. Т. 14, №1(2), С. 510-513.
- Мадриченко, В.Г. Преобразователи перемещения для контроля состояния пневмо-гидравлической системы ракет носителей/В.Г. Мадриченко, В.С. Тиньгаев, Р.Р. Акбаров, Н.А. Ливочкина//Известия Самарского научного центра Российской академии наук. 2012. Т. 14, №1(2).С. 502-504.
- Матюнин, С.А. Повышение чувствительности преобразователей линейных перемещений для исполнительных органов перспективных ракет носителей/С.А. Матюнин, В.С. Тиньгаев//Региональная научно-практическая конференция, посвященная 50-летию первого полета человека в космос. 2011. С. 193-194.
- Тиньгаев, В.С. Способ уменьшения температурной погрешности электромагнитных преобразователей линейных перемещений для криогенных условий эксплуатации перспективных ракетоносителей/В.С. Тиньгаев, С.А. Матюнин, В.А. Медников//Актуальные проблемы ракетно-космической техники (II Козловские чтения). 2011. С. 477-478.
