Способы управления индукторными двигателями двойного питания

Автор: Носкова Елена Евгеньевна, Марарескул Александр Владимирович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Технологические процессы и материалы
Статья в выпуске: 2 (15), 2007 года.
Бесплатный доступ
Рассмотрены оригинальные частотные способы управления индукторными двигателями двойного питания (ИДДП), представлены результаты исследований способов управления, проведенных на основе визуальной двухфазной модели ИДДП.
Короткий адрес: https://sciup.org/148175526
IDR: 148175526 | УДК: 681.532.55+621.3.072.9+621.313.3
Means of control for special-purpose double-fed motor
Original frequency means of control for special-purpose double-fed motor are considered. Research results of control means carried out the basis of visual double-phase model of special-purpose double-fed motor are given.
Текст научной статьи Способы управления индукторными двигателями двойного питания
-
1. Тезисы докладов 4 Всесоюзного совещания по химии и технологии халькогенов и халькогенидов. Караганда, 18-21 сентября 1990. C. 312.
-
2. Цветные металлы. 1990. № 6. C. 28.
-
3. Цветные металлы. 1990. № 6. C. 29.
-
4. Цветные металлы. 1986. № 2. C. 33.
-
5. Худяков, И. Ф. Металлургия вторичных тяжелых цветных металлов / И. Ф. Худяков, А. П. Дорошкевич, C. В. Карелов. М.: Металлургия, 1987. 528 с.
-
6. Масленицкий, И. Н. Металлургия благородных металлов : учебник для вузов / И. Н. Масленицкий, Л. В. Чугаев, В. Ф. Борбат [и др.]; под ред. И. В. Чугаева. 2-е изд. переработанное и доп. М. : Металлургия, 1987. 432 с.
-
7. Карякин, Ю. В. Чистые химические вещества / Ю. В. Карякин, И. И. Ангелов. М.: Химия, 1974. 322 с.
-
8. Лурье, Ю. Ю. Cправочникпо аналитической химии / Ю. Ю. Лурье. М.: Химия, 1979.480 с.
-
9. Уразов Г. Г. Исследование реакции замещения 2AgCl + Pb = PbCl2 + 2Ag методом термического анализа тройной системы Ag - Pb - CI / Г. Г. Уразов, А. C. Карнаухов // Журнал неорганическая химия. 1956. Т. 1. №4. C. 731.
-
10. Палкин, А. П. Взаимодействие в системе 2AgCl+Pb=PbCl2+2Ag / А. П. Палкин, Ю. П. Афиногенов // Журнал неорганическая химия. 1963. Т. 8. № 2. C. 379.
N. V. Mironkina, О. N. Vyazovoi, A. D. Mihnev, A. I. Ryumin STUDYING OF SOLUBILITY OF SULFHATE OF LEAD AND CHLORIDE OF SILVER IN SOLUTIONS OF SODIUM CHLORIDE
Joint solubility oflead sulfate and silver chloride in solutions of sodium chloride in the temperature intervalfrom 20 up to 90 ° C and the interval of sodium chloride concentration 75...300g\l is considered. Laws of co-settling oflead chlorides and silver at dilution the sated solutions of sodium chloride are established .
Принята к печати в сентябре 2006 г.
Е. Е. Носкова, А. В. Марарескул
СПОСОБЫ УПРАВЛЕНИЯ ИНДУКТОРНЫМИ ДВИГАТЕЛЯМИ ДВОЙНОГО ПИТАНИЯ
Рассмотрены оригинальные частотные спосо/бы. управления индукторными двигателями двойного питания (ИДДП), представлены результаты исследований спосо/бов управления, проведенных на основе визуальной двухфазной модели ИДДП.
Одной из разновидностей двигателей двойного питания являются двухобмоточные многофазные индукторные двигатели двойного питания (ИДДП) на базе машин с электромагнитной редукцией [1]. Важный конструктивный принцип, используемый в ИДДП - принцип двойного питания, позволяет получить большой диапазон регулирования скорости за счет ухода в область сверхнизких скоростей порядка одного оборота в сутки и менее при высоких частотах питания. Отатор и безобмоточный ротор имеют явно выраженные зубцы, которые создают эффект широтно-импульсной модуляции магнитного потока. За счет этого угловая скорость уменьшается (а электромагнитный момент увеличивается) в число зубцов ротора раз. Cочетание двух принципов (электромагнитной редукции и двойного питания) обеспечивает уникальные функциональные возможности ИДДП, что по- зволяет их использовать в прецизионных электроприводах автономных объектов.
Для управления ИДДП можно использовать все способы, применяемые для синхронных машин: частотнонезависимый (в синхронном режиме), частотно-токовый, частотно-векторный и частотно-зависимый (в режиме бесконтактного двигателя постоянного тока), но при этом необходима их некоторая модификация. Два канала воздействия в ИДДП позволяют использовать 6 управляющих координат - по 3 для каждой многофазной обмотки: частоты, амплитуды и фазы питающих напряжений и на их основе формировать новые способы управления, присущие только машинам двойного питания. Изменять управляющие координаты (параметры напряжения) можно как по одной из обмоток, так и по обеим обмоткам. Ниже дается оценка влияния способов управления ИДДП на получение заданных динамических характеристик, выполнение требований к углу нагрузки, потребляемой мощности прецизионных электроприводов (ПЭП) автономных объектов.
Основными управляющими величинами у ИДДП являются частоты. С помощью частот питающих напряжений задается угловая скорость ротора двигателя, равна
ω 1 -ω 2
®д = К ’ ред
где to, и ю 2 - частоты питающих напряжений соответственно первой (или статорной) и второй (или роторной) обмоток; К ред - коэффициент электромагнитной редукции (число зубцов ротора для ИДДП).
Выбирая частоты питания близкими друг другу, можно получать очень низкие («ползучие») скорости. Алгоритмы изменения частот могут быть различными. При этом скорость будет в любом случае заданной, т. е. не зависящей от алгоритма изменения частот (важно только, чтобы их разность была пропорциональной требуемой скорости). Исходное состояние - двигатель стоит (скорость ротора равна нулю).
Частоты питания влияют не только на скорость, но также на другие параметры режима работы. В частности, максимум вращающего момента обратно пропорционален частотам питания определяется по формуле
L m U 1 m 0 U 2 m 0
Мп = - sin 8 „,
0 н0’
σ L 1 L 2 ω 10 ω 20
где знаком 0 помечены установившиеся значения (в статике) соответствующих величин; L - индуктивности и взаимоиндуктивность первой и второй обмоток;
L 2
О = 1 - l L -вспомогательный параметр, выражающийся через параметры обмоток; 8 н - угол нагрузки, зависящий от момента сопротивления нагрузки на валу двигателя; U m - амплитуды соответствующих питающих напряжений.
Из формулы (2) угол нагрузки 8 выражается через остальные параметры режима:
° L 1 L 2 ® 1O ® 2OMco 8 . = - arcsin----------------- ,
L п m 1 m 0 2 m 0
где Мс0 - статический момент нагрузки, который в установившемся режиме равен электромагнитному момен- ту двигателя.
В источниках [2; 3] подробно в общетеоретическом плане рассмотрено влияние алгоритма изменения частот на угол нагрузки. Возможны следующие алгоритмы изменения частот:
-
- одна из частот остается неизменной, а вторая увеличивается;
-
- одна из частот остается неизменной, а вторая уменьшается;
-
- обе частоты изменяются одинаково по величине, но
в противоположные стороны;
-
- обе частоты увеличиваются, но при этом одна из частот изменяется значительнее - так, чтобы возникала разность частот, обеспечивающая требуемую угловую скорость;
-
- обе частоты уменьшаются, но при этом одна из частот изменяется значительнее - так, чтобы возникала разность частот, обеспечивающая требуемую угловую скорость;
-
- одна из частот увеличивается, а вторая - уменьша
ется, но на разную величину.
Простейшим и наиболее распространенным критерием при выборе закона частотного управления является критерий постоянства угла нагрузки. Он обеспечива ется, в частности, с помощью пропорционального зако на частотного управления: U1 m = q1 1Ц, U2m = q2 2to2, где q1A и q2 2 - коэффициенты пропорциональности; первый индекс обозначает напряжение, второй - частоту
Очевидно, что в этом случае в соответствии с (3) при любом из рассмотренных выше алгоритмов изменения частот будет поддерживаться постоянство угла нагрузки:
8 „о =
. ° L 1 L 2 to 10 to 20 М с0 - arcsin
L m q 1 1 ω 10 q 2 2 ω 20
. ° L L М
= - arcsin ———
L m q 1 1 q 2 2
Амплитуды питающих напряжений не влияют на угловую скорость ротора, зависящую, как и в любом синх ронном двигателе, только от частот питающих напряжений, но входят в выражение для угла нагрузки (3). Возможны следующие алгоритмы управления при изменении амплитуд:
-
- амплитуда каждого напряжения меняется в функции частоты соответствующего напряжения: U 1 m = f U 1 ( ® 1 ) , U 2 m = f U 2 ( ® 2 ) ;
-
- амплитуда каждого напряжения меняется в функции частоты другого напряжения: U 1 m = f u 1 ( to 2) , U 2 m = f U 2 ( ® 1 ) ;
-
- амплитуда каждого напряжения меняется в функции частот обоих напряжений: U 1 m = fu Дц, to 2 ), U 2 m = f u 2( to 2 , ® 1 ) .
Второй алгоритм управления при изменении амплитуд целесообразно использовать при одноканальном управлении частотой. Его преимуществом является то, что один из инверторов выполняется регулируемым по частоте, а второй - по амплитуде напряжения. Это упрощает их конструкцию. Обычно используется ШИМ, и в этом случае отсутствует проблема сохранения синусоидальной формы при малых частотах, что характерно для пропорционального изменения частот и амплитуд одного напряжения, когда на низких частотах соответствующее уменьшение амплитуды приводит к узким импульсам
ШИМ и искажению формы огибающей выходного напряжения.
Можно в общем оценить два способа стабилизации
угла нагрузки - с помощью одновременного изменения обеих частот и с помощью изменения амплитуд питающих напряжений. Измененяя только частоты питания, при
отсутствии регулирования амплитуд упрощается конструкция инверторов напряжения. Но при этом требуется использовать более сложные алгоритмы изменения частот. При изменении амплитуд появляется бульшая гибкость в регулировании угла нагрузки, но в то же время требуется усложнение инверторов, которые должны быть способны регулировать амплитуду питающих напряжений. Наибольшие возможности предоставляются при
Управление с помощью фазовых сдвигов может осуществляться по тем же алгоритмам, что и рассмотренное выше изменение частот [2]:
-
- один фазовый сдвиг изменяется (в сторону увеличения или уменьшения) при постоянстве второго;
-
- оба фазовых сдвига изменяются в противоположные стороны (один увеличивается, а второй уменьшается);
-
- оба фазовых сдвига одновременно изменяются в
одновременном использовании двухканального изменения частот и амплитуд питающих напряжений.
Рассмотренные выше виды управления с изменением частот и амплитуд питающих напряжений являются традиционными для всех двигателей переменного тока, отличаясь применительно к ИДДП только наличием второго канала воздействия. При этом возможности управления становятся существенно более разнообразными. Кроме частот и амплитуд могут изменяться также фазовые сдвиги как одного, так и обоих питающих напряжений. Фазовое управление в целом сводится к тому, что обе обмотки ИДДП запитываются напряжениями переменного тока одинаковой частоты, а затем фазы одного или обоих напряжений изменяются, что приводит к перемещению ротора двигателя в нужном направлении. Возможно дополнительное изменение амплитуд питающих напряжений с целью регулирования угла нагрузки.
Частоты первых гармоник задаются для обеих обмо
сторону увеличения;
- оба фазовых сдвига одновременно изменяются в сторону уменьшения.
Общие закономерности изменения при этом угла нагрузки в зависимости от алгоритма изменения фазовых сдвигов оказываются теми же, что и рассмотренные выше при управлении ИДДП изменением частот Однако в данном случае угол нагрузки оказывается зависим от двух процессов: от процесса изменения самих фазовых сдвигов (величины их разности) и от темпа этого изменения (что соответствует изменению частот питания).
Особенностью фазового управления ИДДП является
то, что его можно применять с инверторами тока даже в
разомкнутых системах, в то время как в других случаях питание от инвертора тока приводит к появлению неуравновешенного нагрузкой вращающего момента и поэтому система управления обязательно должна быть замк
ток одинаковыми, а амплитуды определяются техничес
кими характеристиками двигателя и могут различаться. Начальные фазы (фазовые сдвиги относительно некоторой общей точки отсчета) обоих напряжений е 1 и е 2 задаются соответствующими регуляторами в зависимости от требуемого угла перемещения ротора ф z , из которого формируются сигналы задания этих фаз E 1 z и E 2 z . Регуляторы представляют собой аналоговые или цифровые
динамические звенья, структура и параметры которых выбираются с учетом динамических свойств двигателя (например, его передаточных функций).
Фазовые сдвиги непосредственно влияют на угол по-
нута по скорости или положению, иначе происходит неконтролируемый разгон двигателя.
Модель ИДДП, на базе которой проводятся исследования вышеперечисленных способов управления, получена на основе классической теории электромеханического преобразования энергии при общепринятых в теории электрических машин допущениях и содержит уравнения равновесия напряжений для обмоток, уравнение движения (с выражением для вращающего момента и выражением для статического момента), уравнения для угла поворота ротора и двух уравнений для текущих фаз питающих напряжений. Уравнения преобразованы в систему координат, вращающуюся синхронно с частотой питания статорных обмоток, и многофазная машина заменена двухфазной. Все величины записаны в системе относительных единиц.
Система дифференциальных уравнений ИДДП в векторной форме в относительных единицах в синхронных
координатах имеет вид
ворота ротора, что записывается в виде о С + (e t j - E12)+ (e vj - Ev 2) д к , ред
где 8 н -угол нагрузки; e t 1 = ц 1 , E t 2 = ш 2 1 -текущие фазы питающих напряжений; E v 1 , E v 2 - регулируемые значения фазовых сдвигов, которые меняются в процессе управления двигателем.
Изменение фазовых сдвигов приводит к изменению
d ^ dt d v2 dt d ш r
= - ( а 1 + j ш 1 ) ^ + а k 2 V 2 + u1;
= -[« 2 + j ( ® 1
-ш r ) ]^ 2 +а 2 k М + u 2;
L m
dt J о L 1 L 2
T . 1
Im V 1 V 2 + ~ M с ;
*
,
частот с учетом того, что частоты питания ш суть производные от фазовых сдвигов E по времени равны
„ d (E11 +Ev 1) „ d (E12 +Ev2)
Ш =--------’ ® 2 =----T----. (6)
dt dt
где
^ = " r a = R1 /До, a2 = R2/L2о, о = 1 -k1 k2, k1 = Lm/Д,
k 2 = Lm /L 2, значок * - комплексно-сопряженный вектор.
Следовательно, при изменении фазовых сдвигов так или иначе будут изменяться частоты и, следовательно,
лГгe =U ДФ" Ф • ГС •; "
1 1 m 1 m 1 m ’ (g)
u 2 = U 2 m e = U 2 У^ "-ф • +Ф r ) = U 2 m e j”1 "-Ф 1 +Ф r ) .
значение угла нагрузки.
где E 1 и e 2 - регулируемые (начальные) составляющие фаз питающих напряжений. Текущие фазы равны
d ϕ 1 d ϕ
= »!, = ® 2 . (9) dt dt
Статический момент принят в виде:
Мр~ kcT sgn( to r ) - к вт ® г + М в. (10)
Исследование характеристик ИДДП: скорости, момента нагрузки, угла нагрузки для различных алгоритмов управления при изменении частот, амплитуд и фаз питающих напряжений проводилось на модели (рис 1). Это модель ИДДП (7) реализована в подсистеме визуального моделирования Simulink системы MATLAB. В качестве переменных состояния используются потокосцепления статора и ротора, угловая скорость ротора. В качестве управляющих переменных используются 6 величин: по 2 частоты, амплитуды и регулируемые фазы питающих напряжений.
Одну и ту же угловую скорость ротора можно получить с помощью различных алгоритмов управления при изменении частот, амплитуд и фаз питающих напряжений, при этом процессы в ИДДП будут различными. Результаты исследований способов управления ИДДП были сведены (см. таблицу).
Основная проблема при использовании ИДДП в переходных режимах - колебания угла нагрузки с возможностью выпадания двигателя из синхронизма. Приведем переходные процессы в ПЭП с ИДДП при использовании алгоритмов изменения частот №1-6 при изменении заданной угловой скорости на ±0,2 о. е. от номинального значения (рис. 2).
Наибольшие значения угла нагрузки можно получить с использованием алгоритма № 5. Наиболее неблагоприятным можно считать алгоритм № 4. Если при изменении частоты ротор продолжает вращаться в ту же сторо ну, то присутствует отрицательный эффект - первое колебание угла нагрузки идет в направлении к -90°. Анализ результатов расчетов переходных характеристик ИДДП на основе модели (7) показывает, что не каждый алгоритм позволяет достичь заданной скорости вращения. В частности, с помощью алгоритмов №1и№4не всегда можно получить скорость больше или меньше на 0,2 о. е. от номинального значения.
Исследуя влияние алгоритмов изменения амплитуд питающих напряжений, можно сделать вывод, что независимо от того амплитуда напряжения какой обмотки изменяется, при уменьшении амплитуды первое колебание угла нагрузки идет в отрицательном направлении к значению -90°. Чтобы приблизить угол нагрузки к значению 0°, нужно увеличивать амплитуду напряжения, что не всегда приемлемо. Таким образом, изменением амплитуд питающих напряжений при формировании заданной скорости вращения ротора полной стабилизации угла нагрузки обеспечить не удается, так как требуется большой запас по напряжению у источника питания.
Приведем переходные процессы в ПЭП с ИДДП при использовании алгоритмов изменения фазовых сдвиговт (рис. 3). При возрастании фазового сдвига напряжения питания первой или второй обмоток увеличивается амплитуда колебаний угла нагрузки.
В целом изменение фазового сдвига напряжения второй обмотки является более предпочтительным, так как при одних и тех же фазовых сдвигах амплитуда колебаний угла нагрузки при изменении фазового сдвига напряжения питания второй обмотки меньше, чем при изменении фазового сдвига напряжения питания первой обмотки.
Следовательно, в электроприводах с ИДДП для получения заданной угловой скорости ротора на выбор спо-
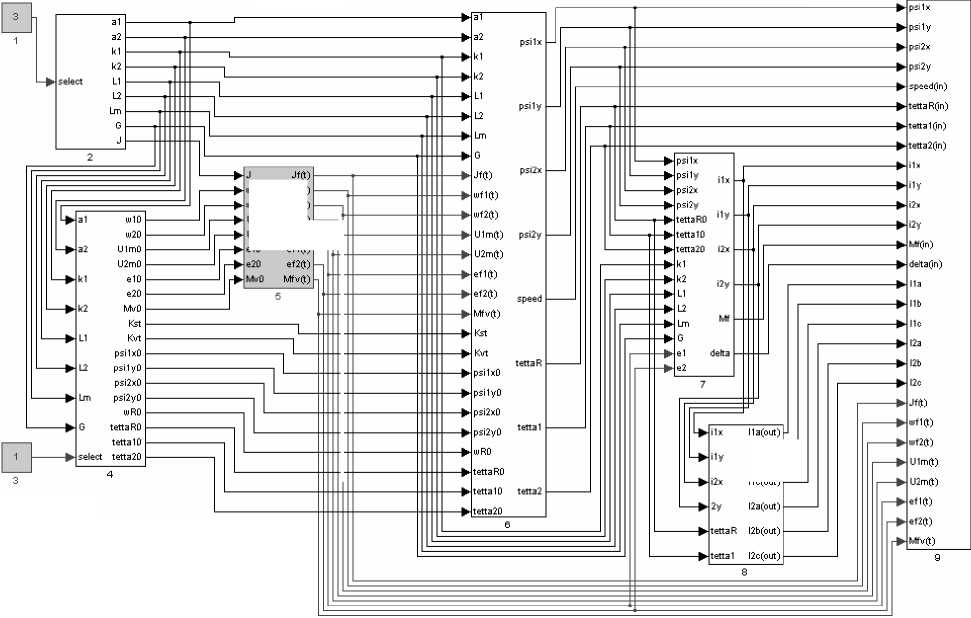
Рис. 1. Визуальная модель ИДДП
U1m$)|----
U2m(t)--- -
I1b(out)|—
I1c(out)l-----
соба управления накладываются ограничения, связанные с возможностью выпадания двигателя из синхронизма из-
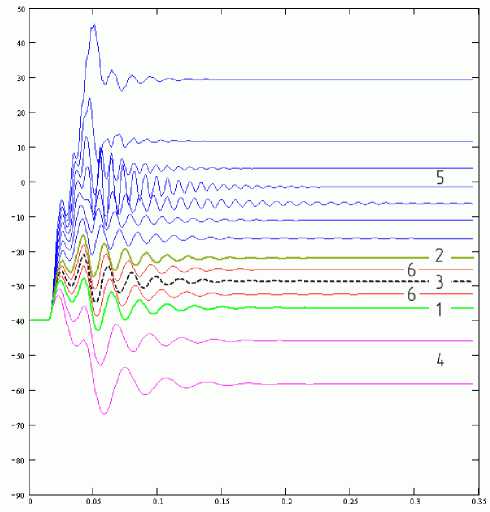
Рис. 2. Зависимость угла нагрузки от времени при изменении частот питающих напряжений за колебания угла нагрузки. Использование некоторых способов управления позволяет уменьшать колебания угла нагрузки, например, алгоритмы изменения частот №2,3,6, алгоритмы изменения амплитуд № 1-3 (при увеличении амплитуд питающих напряжений), алгоритм изменения фазовых сдвигов № 1 при изменении фазового
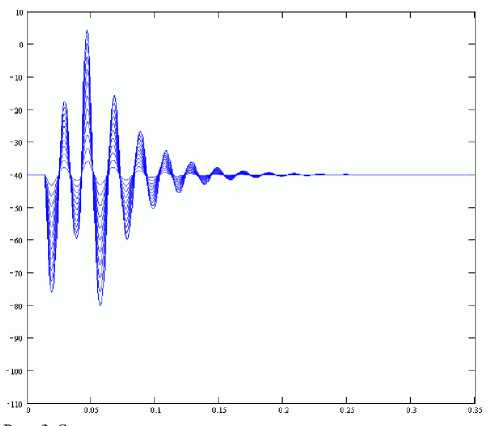
Рис. 3. Зависимость угла нагрузки от времени при изменении фазового сдвига напряжения питания второй обмотки
Результаты исследований частотных способов управления ИДДП
