Способы управления электрореактивными двигательными установками на базе стационарных плазменных двигателей, используемых в качестве маршевых и тяговых двигателей КА

Автор: Шиняков Ю.А., Галайко В.Н., Волков М.П., Гордеев К.Г., Горошков И.Н., Обухов В.А.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Управление и моделирование
Статья в выпуске: 1 т.5, 2003 года.
Бесплатный доступ
Рассмотрены способы управления электрореактивными двигательными установками (ЭРДУ) на базе стационарных плазменных двигателей (СПД), используемых в качестве маршевых и тяговых двигателей космических аппаратов (КА), при электроснабжении непосредственно от солнечной батареи (СБ), генерируемая мощность которой изменяется в больших пределах. Системы питания и управления ЭРДУ в этом случае существенно отличаются от применяемых ранее в системах коррекции орбиты КА, поскольку решают новую задачу: либо обеспечение максимальной тяги двигателя, либо максимальное использование мощности СБ. Это достигается с помощью экстремального регулятора, который изменяет расход рабочего вещества (и разрядный ток СПД) таким образом, чтобы тяга СПД или мощность потребления от СБ были максимальными в каждый момент времени. Эффективное расходование рабочего вещества обеспечивается стабилизацией анодного напряжения СПД на максимально допустимом уровне. Предложены структурно-функциональные схемы СПУ, реализующие указанные способы управления ЭРДУ.
Короткий адрес: https://sciup.org/148197726
IDR: 148197726 | УДК: 629.78.01
Control means of thruster units on stationary plasma thrusters base as sustainer and traction thrusters of space craft
Are considered control means of thruster units (TU) on base of stationary plasma thrusters (SPT), used as sustainer and traction thrusters of the Space Craft (SC) under power supply from solar battery (SB) directly, generated power its is changed in large range. Supply and control systems of TU are differed importantly from used earlier in the SC orbit correction systems. In this case a new problem is solved: either supplying with thruster.s maximum traction or maximum using of SB power. It is reached by extreme regulator, which changes expenditure of working substance (and discharge current of SPT) up to maximum SPT traction or consumption power from SB in every time. Effective consumption of working substance is ensured by stabilization of SPT anode voltage at maximum permissible level. Are offered structural-functional diagrams of SPT, realizing stated control means of TU.
Текст научной статьи Способы управления электрореактивными двигательными установками на базе стационарных плазменных двигателей, используемых в качестве маршевых и тяговых двигателей КА
И.Н. Горошков2, В.А. Обухов3
-
1 НПЦ «Полюс», г. Томск,
-
2 НПО им. С.А. Лавочкина, г. Химки,
-
3 НИИПМЭ МАИ, г. Москва
Рассмотрены способы управления электрореактивными двигательными установками (ЭРДУ) на базе стационарных плазменных двигателей (СПД), используемых в качестве маршевых и тяговых двигателей космических аппаратов (КА), при электроснабжении непосредственно от солнечной батареи (СБ), генерируемая мощность которой изменяется в больших пределах. Системы питания и управления ЭРДУ в этом случае существенно отличаются от применяемых ранее в системах коррекции орбиты КА, поскольку решают новую задачу: либо обеспечение максимальной тяги двигателя, либо максимальное использование мощности СБ. Это достигается с помощью экстремального регулятора, который изменяет расход рабочего вещества (и разрядный ток СПД) таким образом, чтобы тяга СПД или мощность потребления от СБ были максимальными в каждый момент времени. Эффективное расходование рабочего вещества обеспечивается стабилизацией анодного напряжения СПД на максимально допустимом уровне. Предложены структурно-функциональные схемы СПУ, реализующие указанные способы управления ЭРДУ.
В последнее время при создании КА для исследования Солнечной системы и околоземного космического пространства в качестве маршевых двигателей для межпланетных перелетов и тяговых двигателей для перевода КА с одной орбиты на другую рассматривают электрореактивные двигательные установки (ЭРДУ) на базе стационарных плазменных двигателей (СПД), обладающих высоким удельным импульсом [1, 2].
Существенное влияние на выходные и эксплуатационные характеристики ЭРДУ оказывает система питания и управления (СПУ), которая в общем случае выполняет следующие основные функции:
-
- прием и исполнение команд управления, по ступающих от бортового вычислительного комплекса (БВК) и обеспечивающих подготовку и пуск СПД по заданной программе;
-
- контроль режима работы и стабилизацию или регулирование выходных параметров ЭРДУ;
-
- диагно стику аварийных ситуаций и автоматиче ское восстановление работоспособности ЭРДУ включением резервных уст-
- ройств вместо отказавших;
-
- сбор информации о работе комплекса СПУ-ЭРДУ и выдачу ее в БВК.
До сих пор ЭРДУ на базе СПД применялись в системах коррекции орбиты КА, где требовалась стабилизация тяги двигателя. СПУ здесь выполняла функции ограничения разрядного анодного напряжения при холостом ходе и тока при запуске двигателя и аномальных процессах в нем, а также стабилизации разрядного тока. Напряжение разряда при этом стабилизировалось аппаратурой регулирования и контроля (АРК), служащей первичным источником питания комплекса СПУ-ЭРДУ. Мощность АРК значительно превышала максимально допустимую для СПД в процессе всего срока эксплуатации, поскольку была рассчитана не только на ЭРДУ, но и на все бортовые потребители КА..
Электропитание ЭРДУ, используемых в качестве маршевых и тяговых двигателей, предполагается осуществлять непосредственно от солнечной батареи (СБ) [2]. Данный способ электроснабжения имеет ряд преимуществ:
-
- повышение помехозащищенности по
шинам питания ввиду отсутствия общих шин между СПУ и другими потребителями;
-
- возможность выбора оптимального для комплекса СПУ-ЭРДУ напряжения СБ;
-
- уменьшение потерь благодаря отсутствию промежуточных звеньев преобразования электроэнергии между СБ и СПУ.
Вместе с тем вследствие деградацион-ных процессов, а также в зависимости от условий эксплуатации генерируемая мощность, напряжение СБ и ее ВАХ могут изменяться в больших пределах, поэтому перед СПУ ставятся альтернативные задачи: либо обеспечение максимальной тяги СПД, либо максимальное использование мощности СБ, но с обязательным условием - экономным расходованием рабочего вещества (РВ), поступающего в СПД.
Рассмотрим реализацию поставленных перед СПУ задач при нестабилизированном источнике питания разряда. На рис. 1 показаны ВАХ СБ, зависимости мощности, потребляемой двигателем ( p ) , и тяги двигателя ( f ) от напряжения СБ, которые определяются по формулам:
Р = i СБ
u СБ
iu aa
η СПУ
и согласно [3]
f = 4 2 u a i a m П дв , (1)
где i СБ и u СБ ‒ ток и напряжение СБ;
-
η СПУ ‒ КПД СПУ;
-
m & ‒ секундный расход РВ;
-
ηдв ‒ тяговый КПД двигателя.
В соответствии c результатами испытаний СПД [4] разрядный (анодный) ток равен расходу рабочего вещества, выраженному в токовых единицах (А):
α em &
1 a - MT ’
-
где e и M ‒ заряд и масса электрона;
α - коэффициент пропорциональности (в хороших двигателях значение α может быть очень близко к единице).
Подставляя уравнение (2) в формулу (1), получаем окончательное выражение для тяги
-
f = i aV 2 u a Y ,
М где Y - пдв —.
α e
Как указано на рис.1, напряжения СБ, при которых до стигается максимум p и f ( U С р Б , U С f Б), не совпадают. Следовательно, возможны два способа управления маршевыми ЭРДУ на базе СПД: либо максимальный отбор мощности от СБ, либо обеспечение максимальной тяги двигателя.
Структурно-функциональная схема СПУ, реализующая данные способы, представлена на рис. 2. Регулирование максимальной мощности СБ и максимальной тяги дви- гателя осуществляется с помощью экстре-i и u ‒ ток и напряжение анода a a мального регулятора (ЭР), служащего для
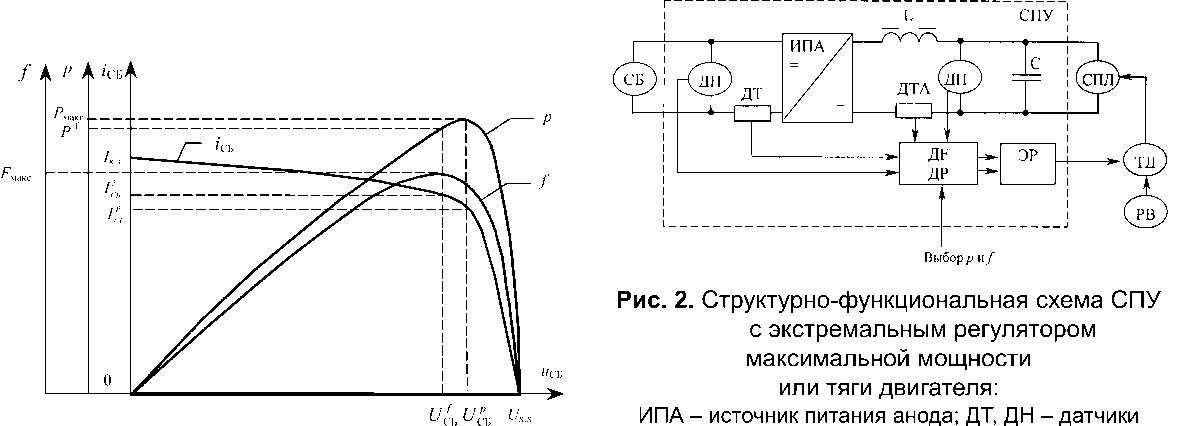
тока и напряжения СБ; ДТА, ДНА ě датчики тока
Рис. 1. Ток СБ, тяга и мощность потребления и напряжения анода; ДР, ДF ě датчики мощности
СПД в зависимости от напряжения СБ и тяги; ЭР ě экстремальный регулятор
определения рабочей точки на ВАХ, в которой энергия, генерируемая СБ, либо тяга СПД максимальна, при этом ЭР соответствующим образом воздействует на термодроссель (ТД), подающий РВ в двигатель. Если сравнить эти два способа управления ЭРДУ, то по расходу РВ более экономичен первый, так как I СБ < I cb , а ток СБ прямо пропорционален току анода СПД и, в соответствии с уравнением (2), расходу РВ. Следовательно, обеспечение максимальной тяги двигателя применимо тогда, когда необходимо за возможно короткое время переместить КА в требуемую точку орбиты и когда имеется достаточный запас РВ и электроэнергии первичного источника.
Эти способы и реализующие их устройства по управлению тягой двигателя и отбору максимальной мощности от СБ разработаны в НПЦ «Полюс» (г. Томск) [5-7].
Сравним варианты питания СПД: стабилизированным, соответствующим максимально допустимому анодному напряжению двигателя, и нестабилизированным анодным напряжением. В качестве критерия оценки воспользуемся одним из основных показателей работы СПД ‒ удельной тягой:
fуд = f . (3) m
Подставляя уравнение (1) в формулу (3) и используя выражение (2), получаем fуд - 2U1KK , (4)
где K - п дв
α e
M .
Из выражения (4) следует, что удельная тяга прямо пропорциональна ua . Следова- тельно, чем выше анодное напряжение, тем меньше расход РВ для создания одной и той же тяги. На рис. 3 представлены зависимости стабилизированного (uа.с) и нестабилизи-рованного напряжений анода, удельной тяги СПД и напряжения СБ от времени полета КА (tn) при удалении его от Солнца (uʼа.нс, fуд .нс, uСБ) и при нахождении на околоземной орбите (uа. нс, fуд. нс, u СБ). Экономия расходования РВ определяется отношением площади, ог-
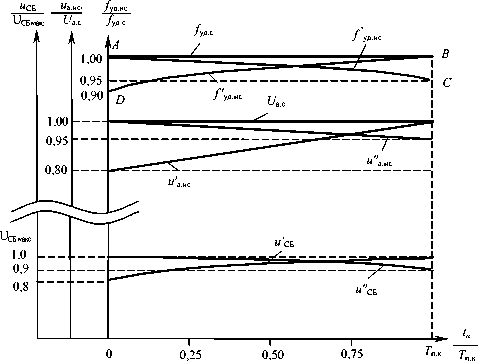
Рис. 3. Удельная тяга, напряжения анода СПД и СБ в зависимости от времени полета:
f уднс u анси u СБ ■ при удалении КА от Солнца и f" уд.нс u а.нси u Сб - пРи нахождении КА на околоземной орбите;
Т пк - конечное время полета
раниченной прямыми AВ и BС и кривой f уд".нс либо прямыми AD и AB и кривой f уд.’нс к площади прямоугольника 0АВТп.к. Например, при полете КА «Фобос-Грунт» к Марсу экономия РВ составляет 4-5 % [7].
В связи с тем, что при полете КА «Фобос-Грунт» к Марсу мощность СБ уменьшается в два ‒ два с половиной раза [8], перед СПУ остро ставится задача ‒ максимальное использование мощности при создании суммарного импульса тяги СПД. Другими словами, СПУ должна регулировать входную мощность СПД ( р вх.СПД = i а u а) таким образом, чтобы мощность потребления от СБ в каждый момент времени была максимально возможной.
p вх.СПД
Поскольку pпотр - , пСПУ - const, ηСПУ можно утверждать, что pвх.СПД и pпотр находятся в прямой пропорциональной зависимости, поэтому оценку входной мощности двигателя можно проводить по мощности потребления от СБ.
На рис.4 представлены характеристики СБ: i СБ = f(u СБ) и p СБ = f(u СБ ) в различных условиях эксплуатации, из которых следует, что мощность СБ, а следовательно, и входная мощность двигателя могут быть максимальными только при конкретных режимах работы СБ, т.е. в оптимальных точках ВАХ: а 1 (I СБ1 ,
Р
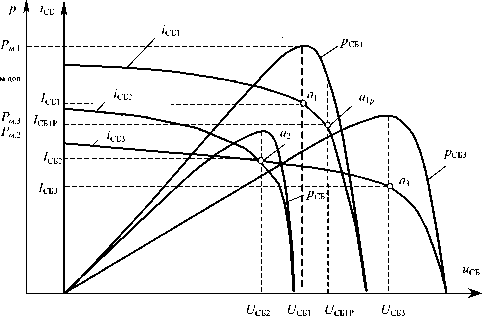
Рис.4. Характеристики СБ: i СБ =f(U СБ ) и Р СБ =f(U СБ ) в различных условиях эксплуатации
U СБ1 ), а 2 (I СБ2 , U СБ2 ), а 3 (I СБ3 , U СБ3 ).
Задача СПУ -- обеспечить работу двигателя в указанных выше точках ВАХ. Этого можно достигнуть поддержанием на максимальном уровне входной мощности двигателя, которую можно регулировать двумя параметрами -- i а и u а. Однако с целью экономного расхода РВ согласно уравнению (4) необходимо поддерживать u а на максимальном уровне, т.е. равным максимально допустимому анодному напряжению двигателя.
Следовательно, обеспечить входную мощность двигателя, соответствующую оптимальной точке ВАХ, возможно только анодным током, т.е. изменением секундного расхода РВ с помощью термодросселя по сигналу с датчика тока анода, который пропорционален расходу РВ, при этом анодное напряжение CПД должно иметь максимально допустимое значение. В зависимости от мощности СБ должны быть сформированы два этапа ее регулирования.
На первом этапе мощность СБ превышает максимально допустимую входную мощность двигателя. В данном случае напряжение и ток анода стабилизируют на максимально допустимых для двигателя значениях. В результате в это время мощность СБ оказывается недоиспользованной на 25-17 % [8] (рис.5). Коэффициент использования мощности СБ можно увеличить параллельным включением двух двигателей с последующим отключением одного из них, когда мощность СБ становится равной или меньшей максимально допустимой входной мощности двигателя.
На втором этапе мощность СБ меньше максимально допустимой входной мощности двигателя. В этом случае напряжение анода стабилизируют на максимально допустимом для двигателя значении, а ток анода регулируют расходом РВ таким образом, чтобы мощность потребления от источника электропитания была максимальной. Зависимости p СБ, p потр, u a, i a от времени приведены на рис. 5.
Электропитание на первом этапе показано на рис. 4 (см. характеристики СБ i СБ1 = f (u СБ1 ) и p СБ1 = f (u СБ1 ) , где максимальная мощность СБ Р м.1 больше максимально допустимой входной мощности Р м.доп и соответствует рабочей точке а 1 p на ВАХ i СБ1 = f (u СБ1 ) с параметрами I СБ1 Р и U СБ1 Р ). Вследствие дег-радационных процессов, как указывало сь выше, мощность СБ уменьшается и становится меньше максимально допустимой входной мощности СПД. В этом случае электропитание двигателя о суще ствляется на рабочих точках а 2 на ВАХ i СБ2 = f (u СБ2 ) с параметрами I СБ2 и U СБ2 и а 3 на ВАХ i СБ3 = f (u СБ ) с параметрами I СБ3 и U СБ3.
На рис. 6 приведена структурно-функциональная схема СПУ, обеспечивающей отбор от СБ максимальной мощности. Данная система разработана в процессе выполнения проекта «Фобос-Грунт» и работает следующим образом.
ИПА осуществляет стабилизацию анод-
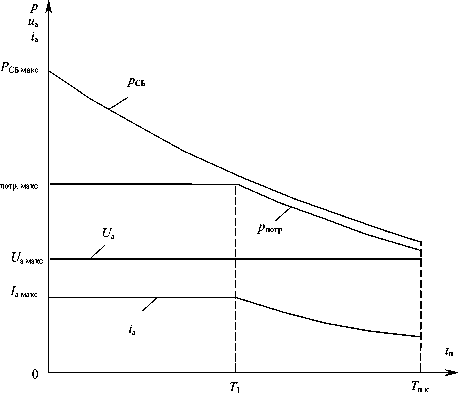
Рис.5. Мощность СБ (рСБ), мощность потребления (рпотр), напряжение и ток анода СПД (ua, ia) в зависимости от времени полета ного напряжения на уровне, равном максимально допустимому значению анодного напряжения СПД. После запуска (поджига) двигателя в цепи его питания возникает ток разряда (анода) Iа. Сигнал, пропорциональный анодному току, с датчика тока поступает на первый вход блока сравнения. На выходе датчика мощности, обрабатывающего информацию о напряжении и токе СБ, формируется напряжение, пропорциональное текущему значению потребляемой мощности. Это напряжение поступает на вход экстремального регулятора и пороговое устройство.
Пока мощность, генерируемая СБ, превышает максимально допустимую мощность двигателя, СПУ обеспечивает работу СБ в точке а 1 р ВАХ (рис.4). ИПА с помощью контура обратной связи по току анода двигателя (ДТА, БС, УР, УФР и ТД) осуществляет стабилизацию тока анода на максимально допустимом для двигателя значении. При снижении мощности, генерируемой СБ, когда потребляемая мощность становится меньше
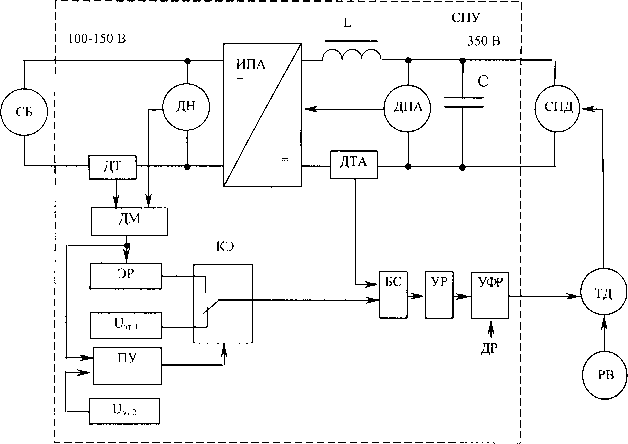
Рис. 6. Структурно-функциональная схема устройства СПУ по отбору от СБ максимальной мощности:
ИПА ě стабилизированный источник питания анода; ДНА и ДТА ě датчики напряжения и тока анода; ДН и ДТ ěдатчики напряжения и тока потребления СБ; ДМ ě датчик мощности; ЭР ě экстремальный регулятор;
КЭ ě коммутирующий элемент; ПУ ě пороговое устройство; БС ě блок сравнения; УР ě усилитель рассогласования; ТД ě термодроссель; Uэт.1 и Uэт.2 ě эталонные напряжения, соответствующие максимальным значениям тока анода и входной мощности двигателя соответственно; УФР ě устройство формирования режима ТД;
ДР ě дежурный режим максимально допустимой мощности двигателя, срабатывает ПУ и КЭ подключает второй вход БС к входу ЭР, выходное напряжение которого пропорционально мощности потребления и является эталонным для БС. ИПА с помощью описанного выше контура обратной связи по току анода двигателя стабилизирует ток анода на заданном уровне в каждый заданный момент времени.
Таким образом, применение ЭРДУ на базе СПД в качестве маршевых и тяговых двигателей КА требует от СПУ выполнения задачи обеспечения либо максимальной тяги, либо максимального использования СБ. Способ управления ЭРДУ с обеспечением максимальной тяги СПД применим там, где требуется за короткое время перемещение КА и имеется достаточный запас РВ и энергии первичного источника. Когда мощность СБ изменяется в больших пределах, рекомендуется применять способ управления ЭРДУ с максимальным использованием ее мощности, которое достигается регулированием анодного тока СПД. Экономный расход РВ достигается стабилизацией анодного напряжения СПД на максимально допустимом уровне.
