Спутниковая навигация космических аппаратов на лунной орбите

Автор: Микрин Евгений Анатольевич, Михайлов Михаил Васильевич, Орловский Игорь Владимирович, Рожков Сергей Николаевич, Краснопольский Илья Андреевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 2 (21), 2018 года.
Бесплатный доступ
Предложена концепция построения системы спутниковой навигации для обслуживания космических аппаратов, находящихся на лунных орбитах, орбитах перелета Земля-Луна-Земля, а также на околоземных участках орбит (до расстояний ~1 млн км) космических аппаратов дальнего космоса. Предложенная концепция предполагает развитие существующей системы ГЛОНАСС и использование ее инфраструктуры, а также возможность применения в качестве аппаратуры потребителя имеющейся аппаратуры с модернизированным программным обеспечением. Для предложенной концепции проведено моделирование функционирования системы навигации лунного космического аппарата, а также объекта, находящегося на поверхности Луны. Получены точностные и динамические характеристики навигационного решения для различных вариантов построения системы, даны рекомендации по выбору параметров исследуемой спутниковой навигационной системы.
Освоение луны, лунная система навигации, глонасс, аппаратура спутниковой навигации, окололунные орбиты, орбиты перелета
Короткий адрес: https://sciup.org/143166672
IDR: 143166672 | УДК: 629.78.072.1:523.34
Satellite navigation of spacecraft in lunar orbit
The paper proposes a concept for constructing a satellite navigation system to support spacecraft in lunar orbits, Earth-Moon-Earth transfer orbits, as well as in near-Earth (up to ~1 million km) sections of deep-space orbits. The proposed concept envisages an expansion of the existing GLONASS system and the use of its infrastructure, as well as the ability to use as the end-user equipment the existing hardware with updated software. Run within the framework of the proposed concept were functional simulations of the navigation system for a lunar spacecraft, as well as for an object on the lunar surface. Accuracy and dynamic characteristics of the navigation solution for various system architectures were obtained, recommendations for selection of parameters for the satellite navigation system in question are provided.
Текст научной статьи Спутниковая навигация космических аппаратов на лунной орбите
В настоящее время утверждены «Основные положения основ государственной политики Российской Федерации в области космической деятельности на период до 2030 года» [1], в которых в качестве приоритетного направления рассматривается Программа исследования и освоения Луны и дальнего космоса. Решение этой задачи предполагает создание определенной инфраструктуры обеспечения таких полетов. Одним из ее основных элементов является инфраструктура навигационного обеспечения космических аппаратов (КА), находящихся на орбитах Луны или орбитах перелета Земля– Луна–Земля, а также КА на орбитах дальнего космоса. От первых опытов в конце 1990-х гг. [2] до настоящего времени для навигационного обеспечения околоземных КА широкое распространение получила аппаратура, использующая сигналы глобальных спутниковых навигационных систем (ГСНС), таких как ГЛОНАСС и GPS . Так, в докладе NASA [3] приводится более 90 примеров использования подобной навигационной аппаратуры для КА за последнее десятилетие. Однако, вследствие значительной удаленности от Земли, а также излучения навигационного сигнала ГСНС в сторону Земли, использование сигналов ГСНС при лунных миссиях традиционно сопряжено со значительными трудностями, связанными с разработкой принципиально новых классов антенн и большой погрешностью получаемого навигационного решения [4].
В настоящее время для обеспечения лунных полетов рассматриваются варианты создания на окололунных орбитах навигационных спутниковых систем, похожих на системы ГЛОНАСС или GPS . Однако, очевидна грандиозность затрат на создание такой системы, требующей наличия не только космического сегмента, но и инфраструктуры его обеспечения, аналогичной инфраструктурам ГЛОНАСС и GPS . В настоящей работе предложена концепция построения навигационной системы на базе наземной инфраструктуры ГЛОНАСС с космическим сегментом, находящимся на околоземной орбите, обеспечивающей высокоточную навигацию объектов, находящихся на указанных выше участках полета.
Основными требованиями при разработке концепции являлись:
-
• высокая надежность и оперативность решения задачи;
-
• высокая точность определения параметров движения объектов;
-
• минимальные финансовые и временные затраты на разработку системы.
Рассмотрены два варианта системы, разработаны алгоритмы формирования оценки координат и скорости объектов по измерениям от предложенных навигационных систем, проведено моделирование их функционирования, определены точностные и динамические характеристики решения навигационной задачи.
Концепция построения навигационной системы
В качестве основы навигационной системы, обеспечивающей автономное определение текущих векторов координат и скорости КА при перелете от Земли к Луне и обратно, навигацию на окололунной орбите и лунной поверхности, предлагается использовать существующие в настоящее время средства системы ГЛОНАСС:
-
• командно-измерительный комплекс;
-
• центр управления;
-
• околоземный космический сегмент, включающий группировку навигационных спутников (НС), аналогичных спутникам системы ГЛОНАСС.
Рассматриваются два варианта конфигурации космического сегмента навигационной системы:
-
1. Шесть навигационных спутников на орбитах ГЛОНАСС в трех плоскостях с определенными фазами в каждой плоскости. НС аналогичны штатным спутникам ГЛОНАСС (и дополняют систему ГЛОНАСС), но на них дополнительно установлены поворотные остронаправленные антенны с шириной диаграммы направленности ® ±2 ° . В процессе работы антенны отслеживают Луну или КА, находящийся на перелетной траектории. Антенна излучает в направлении Луны (или КА) штатный навигационный сигнал системы ГЛОНАСС.
-
2. Шесть аналогичных НС, выводимых на круговые четырехсуточные орбиты радиусом порядка 106 000 км, в двух плоскостях, с тремя спутниками в каждой плоскости. Одновременно спутники могут использоваться в качестве функционального дополнения системы ГЛОНАСС. Выбор четырехсуточной орбиты обеспечивает большую измерительную базу и, соответственно, высокую точность измерений. Кроме того, для таких орбит затраты топлива на выведение близки к затратам на выведение НС на орбиты ГЛОНАСС.
Для обеспечения работы аппаратуры спутниковой навигации (АСН) в окрестности Луны мощность излучения остронаправленных антенн должна быть примерно равна мощности штатных антенн НС ГЛОНАСС. Диаметр такой антенны примерно равен трем метрам.
При реализации данного подхода для решения навигационной задачи КА на всех участках полета может использоваться единая стандартная АСН, заимствуемая с околоземных объектов с соответствующей доработкой программного обеспечения. В качестве такой аппаратуры может быть использована эксплуатируемая в настоящее время АСН транспортных кораблей «Союз» и «Прогресс» модернизированной серии [5].
В процессе перелетов аппаратура работает следующим образом:
-
• после выведения на орбиту Земли АСН КА работает по околоземным навигационным системам и определяет параметры орбиты с погрешностью (1 ст ) 5 м по координатам и 1 см/с по скорости. По этим данным рассчитывается и выдается импульс перехода на орбиту перелета к Луне;
-
• после перехода на орбиту перелета к Луне на дистанции более 200 тыс. км остронаправленные антенны НС по соответствующему целеуказанию осуществляют разворот в сторону КА. АСН КА по сигналам НС определяет параметры орбиты КА (с постоянной времени фильтра Т ф = 2 ч) с погрешностью (1 ст ) для первого варианта (НС на орбитах ГЛОНАСС) по координатам 75 м, по скорости 0,1 м/с; для второго варианта (НС на 4-суточных орбитах) — по координатам 15 м, по скорости 0,02 м/с. По этим данным реализуется расчет, и выдаются импульсы для перехода на окололунную орбиту;
-
• на окололунной орбите и орбите перелета Луна–Земля параметры движения КА определяются с аналогичными точностями при аналогичной постоянной времени фильтра;
-
• при посадке какого-либо модуля, оснащенного аппаратурой АСН, на поверхность Луны, при постоянной времени фильтра Т ф = 3 ч обеспечивается определение лунных координат модуля с погрешностью (1 ст ) для первого варианта размещения НС — 1,5 км; для второго варианта размещения НС — 100 м.
Результаты моделирования
При моделировании в сигналах НС учитывался полный бюджет ошибок, соответствующий сигналам системы ГЛОНАСС, за исключением ионосферной погрешности, которая в данном случае отсутствует (при нахождении НС в окрестности горизонта Земли его сигналы в модели АСН не использовались).
Эфемеридные ошибки были установлены величиной (1ст): ~3м. Основную проблему при моделировании представляли собой ошибки псевдодальностей и интегральной фазы вследствие переотражений навигационного сигнала от элементов конструкции КА, а также ошибки, обусловленные внутренними шумами АСН. Для обеспечения достоверной оценки этих ошибок был проведен натурный эксперимент с приемником АСН и антеннами, расположенными на крыше здания. По результатам постобработки записанной в течение суток информации были сформированы файлы ошибок псевдодальностей и интегральных фаз, соответствующих реальному приемнику. Эти файлы использовались в настоящем исследовании для моделирования ошибок псевдодальностей и интегральных фаз. Фрагмент поканального массива ошибок псевдодальностей для временного интервала в один час для каждого используемого НС представлен на рис. 1, фрагмент по-канального массива ошибок интегральной фазы для аналогичного периода времени представлен на рис. 2.
На рис. 3 приведены графики ошибок оценки орбиты КА, находящегося на окололунной орбите высотой 100 км для конфигурации НС по варианту 1. При моделировании бортовая модель движения КА учитывала гармоники гравитационного поля Луны 70x70, модель реальной орбиты учитывала гармоники порядка 100x100. Постоянная времени динамической фильтрации измерений АСН составляла ~1 виток (7 100 с). Из приведенных графиков следует, что для первого варианта конфигурации НС погрешность оценки орбиты (1о) составляет 75 м по координатам и 0,1 м/с по скорости.
На рис. 4 приведены графики ошибок оценки орбиты КА, находящегося на окололунной орбите высотой 100 км при размещении НС по варианту 2.
Из приведенных графиков следует, что для второго варианта конфигурации НС погрешность оценки орбиты (1 о ) составила 15 м по координатам и 0,02 м/с по скорости. На участках перелета от Земли к Луне и обратно ориентировочно можно считать, что точность определения орбиты перелета соответствует точности определения орбиты КА около Луны (рис. 3, 4).
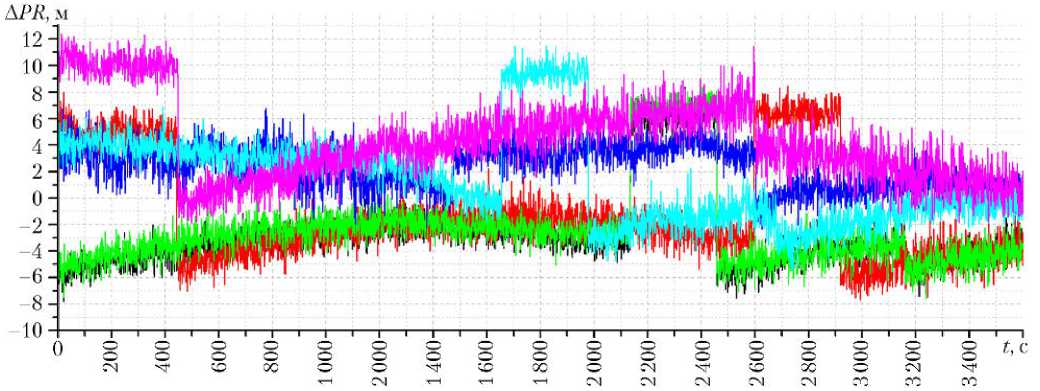
Рис. 1. Графики моделируемых ошибок псевдодальности для каждого используемого навигационного спутника
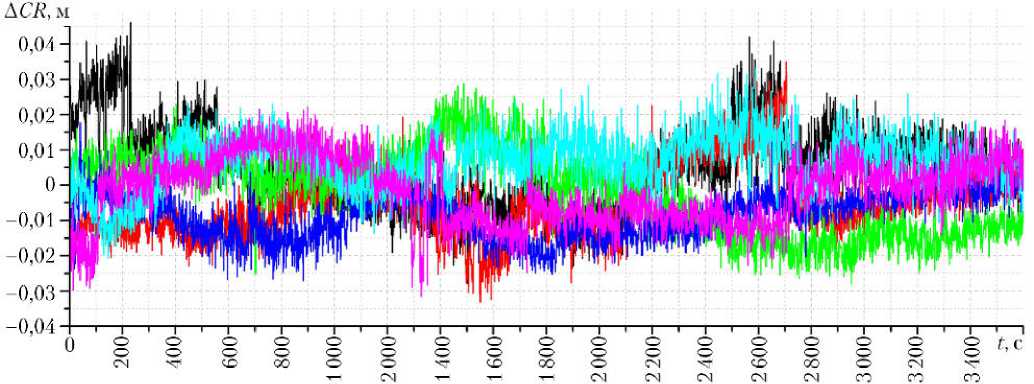
Рис. 2. Графики моделируемых ошибок интегральной фазы для каждого используемого навигационного спутника
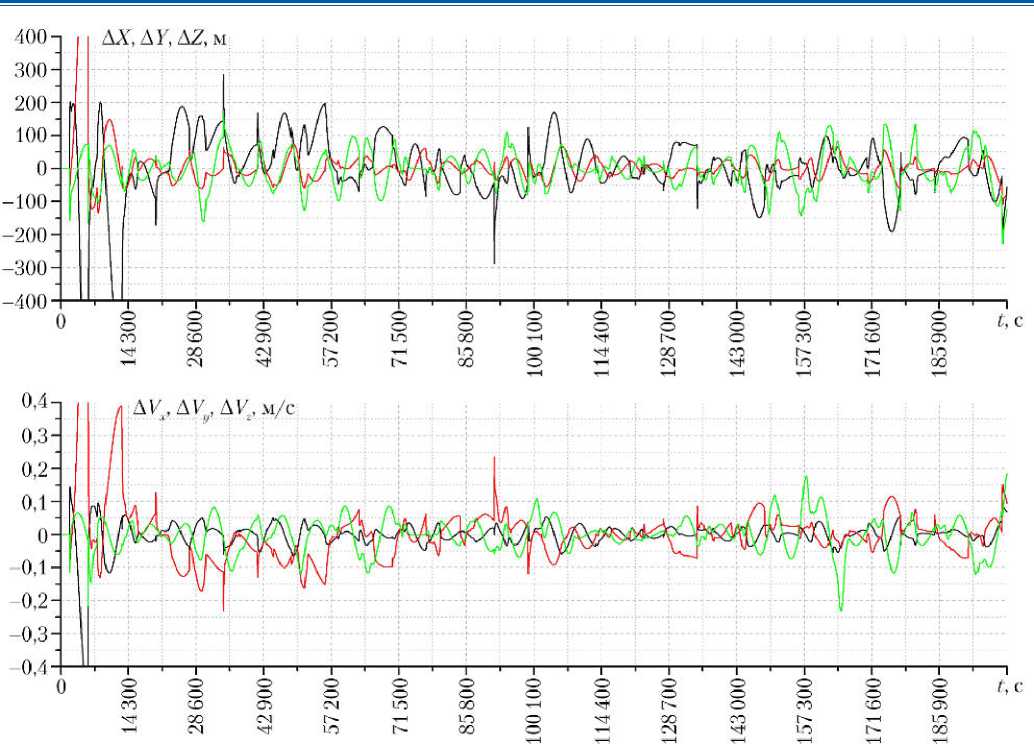
Рис. 3. Графики ошибок оценки определения параметров орбиты КА при размещении шести навигационных спутников на орбитах ГЛОНАСС (Вариант 1): ■ — &X, A Vx; ■ — A Y, A Vy; ■ — AZ, A Vz
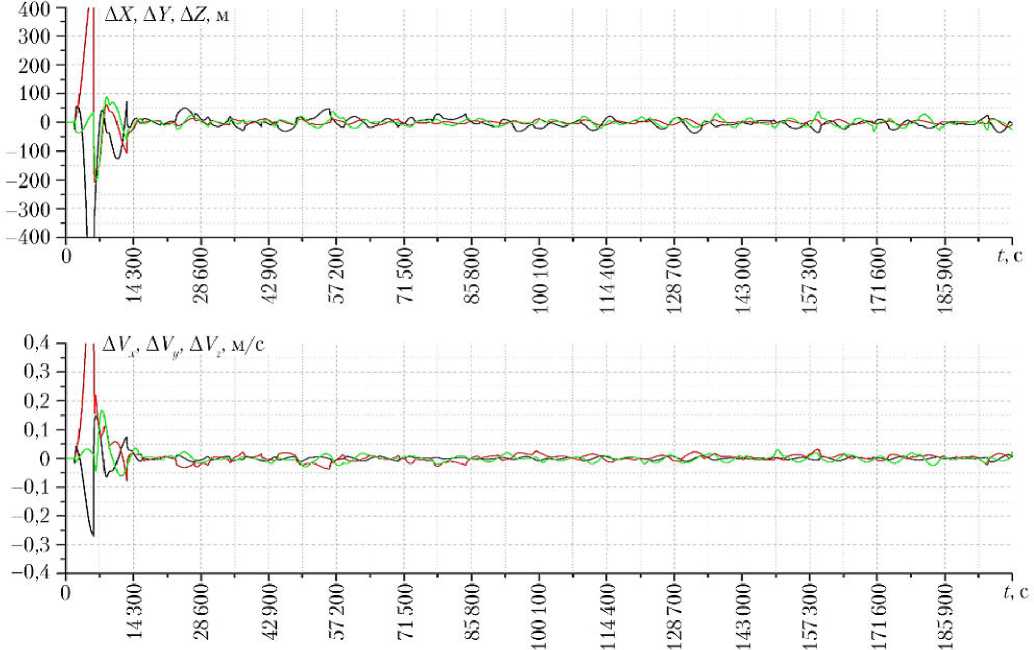
Рис. 4. Графики ошибок оценки параметров орбиты КА при размещении шести навигационных спутников на околоземной орбите высотой ~100 000 км (Вариант 2): ■ — A X, A V x ; ■ — A Y, A V y ; ■ — A Z, A V z
На рис. 5 приведены графики ошибок определения координат объекта, покоящегося на лунной поверхности, при динамической фильтрации измерений АСН с постоянной времени фильтра Т ф = 2 000 с и Т ф = 10 000 с, по варианту 1 конфигурации НС.
Из приведенных графиков видно, что для Т ф = 2 000 с ошибки координат составляют (1 σ ) ~3 км, для Т ф = 10 000 с — ~1 км.
На рис. 6 приведены графики ошибок определения координат объекта, покоящегося на лунной поверхности при динамической фильтрации измерений АСН с постоянной времени Т ф = 2 000 с и Т ф = 10 000 с, для варианта 2 конфигурации НС.
Из приведенных графиков видно, что для Т ф = 2 000 с ошибки координат составляют (ф1 σ ) ~200 м, для Т ф = 10 000 с — ~100 м.
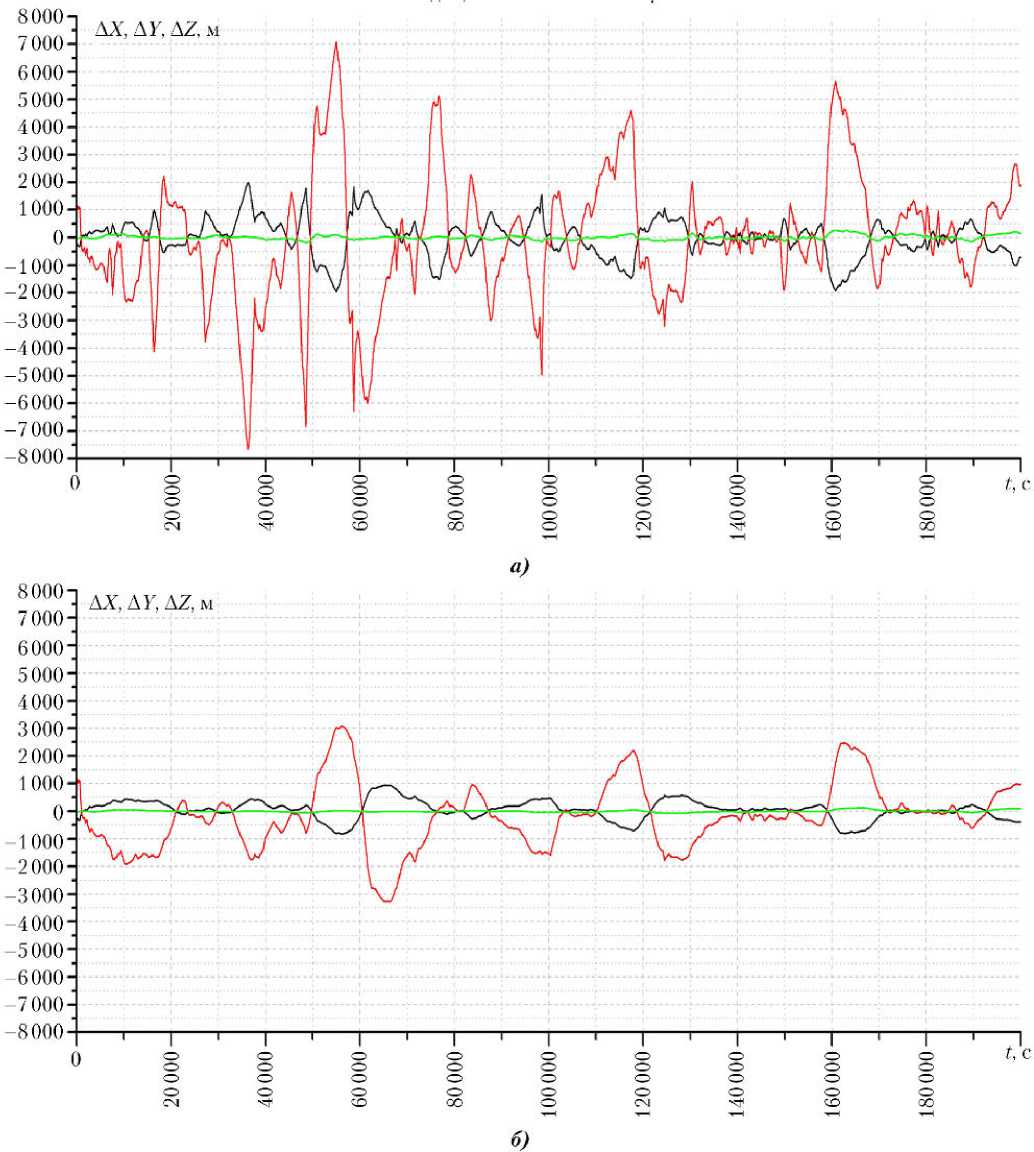
Рис. 5. Графики ошибок оценки определения координат для неподвижного объекта на лунной поверхности при размещении навигационных спутников по варианту 1 при постоянной времени фильтра: а — Т ф = 2 000 с; б — Т ф = 10 000 с; ■ — AX; ■ — A Y; ■ — A Z
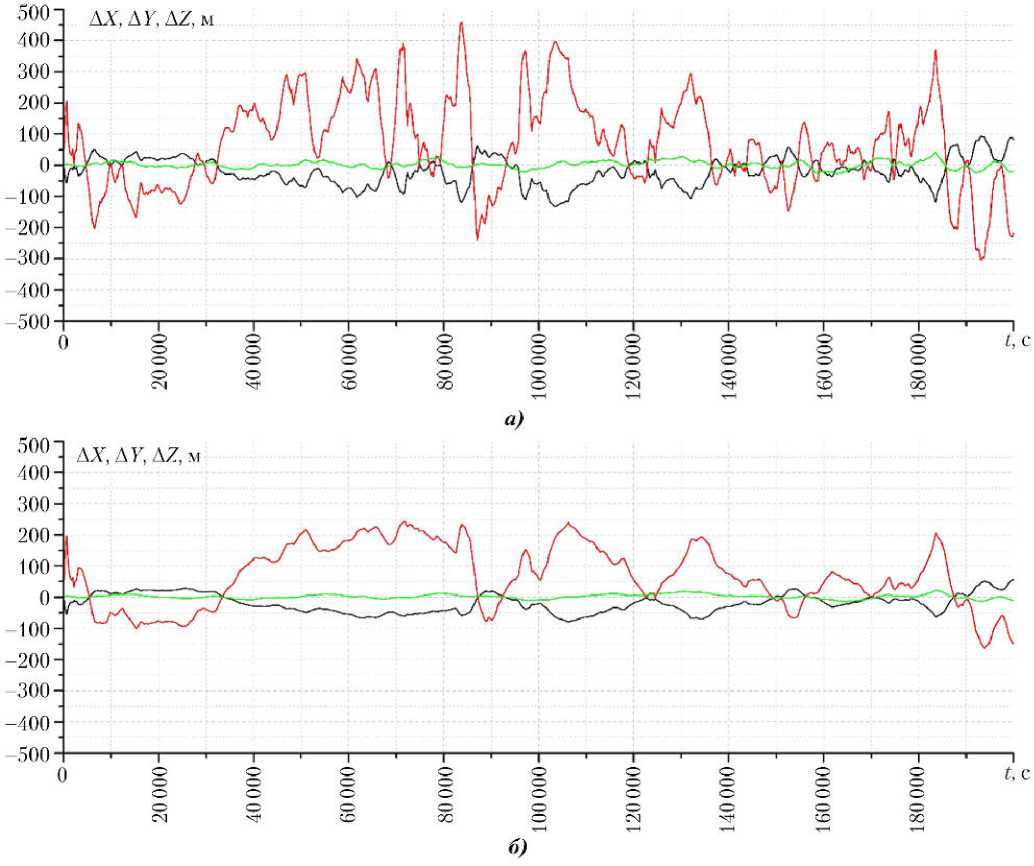
Рис. 6. Графики ошибок оценки определения координат для неподвижного объекта на лунной поверхности при размещении навигационных спутников по варианту 2 при постоянной времени фильтра: а — Тф = 2 000 с; б — Тф = 10 000 с; ■ — A X; ■ — A Y; ■ — A Z
Заключение
-
1. Разработана концепция построения спутниковой навигационной системы для навигационного обеспечения лунных объектов на участках перелета Земля–Луна, Луна–Земля, на окололунной орбите, на видимой лунной поверхности, использующей для навигационного обеспечения наземную инфраструктуру системы ГЛОНАСС.
-
2. Рассмотрены два варианта конфигурации НС на круговых околоземных орбитах:
-
• вариант 1 — конфигурация из шести НС в трех плоскостях, орбиты которых соответствуют орбите ГЛОНАСС;
-
• вариант 2 — конфигурация из шести НС в двух плоскостях с наклонением, близким к 90 ° , и высотой орбиты 100 тыс. км ( Т = 4 сут).
-
3. Рассмотрена возможность использования на КА стандартных АСН для околоземных орбит, работающих по стандартным сигналам системы ГЛОНАСС.
-
4. Разработаны алгоритмы динамической фильтрации сигналов НС, обеспечивающие формирование оценки орбиты КА на участках перелета Земля–Луна, Луна–Земля, окололунной орбите и на поверхности Луны.
-
5. Разработана модель работы АСН на окололунной орбите, орбите перелета и на поверхности Луны, бюджет ошибок которой соответствует бюджету ошибок реальной АСН.
-
6. Проведено моделирование процесса формирования оценки параметров орбиты на участках перелета, окололунной орбите и на поверхности Луны для двух вариантов конфигурации НС.
-
7. Для варианта 1 конфигурации НС погрешность оценки орбиты (1 σ ) на участках перелета и на окололунной орбите составила по координатам 75 м, по скорости 0,1 м/с. Погрешность оценки координат объекта на поверхности Луны (1 σ ) для постоянной времени Т ф = 2 000 с составила 3 км, для Т ф = 10 000 с — 1 км.
-
8. Для варианта 2 конфигурации НС погрешность оценки орбиты (1 σ ) на участках перелета и на окололунной орбите составила по координатам 15 м, по скорости 0,02 м/с. Погрешность оценки координат объекта на поверхности Луны (1 σ ) для постоянной времени Т ф = 2 000 с составила 200 м, для Т ф = 10 000 с — 100 м.
Каждый НС должен быть оснащен остронаправленной антенной с шириной диаграммы направленности ~±2°, отслеживающей Луну и переизлучающей в направлении Луны стандартный навигационный сигнал системы ГЛОНАСС.
Список литературы Спутниковая навигация космических аппаратов на лунной орбите
- Основные положения Основ государственной политики Российской Федерации в области космической деятельности на период до 2030 года и дальнейшую перспективу (утв. Президентом РФ от 19.04.2013 г. № Пр-906).
- Беляев М.Ю., Рулев Д.Н., Чернопятов А.Н., Сазонов В.В., Феккерспергер С., Пеффген В. Определение движения орбитальной станции «Мир» по данным измерений GPS//Космические исследования. 1999. Т. 37. № 3. С. 276-282.
- Parker J. J.K. GPS/GNSS Space Service Volume (SSV) update initiatives. NASA Goddard Space Flight Center. 2016. 40 р.
- Witternigg N., Obertaxer G., Schönhuber M., Palmerini G.B., Rodriguez F., Capponi L., Mozzetti C., Buccinna B., Borghi N., Soualle F., Fernandez-Prim D., Floch J.-J. Weak GNSS signal navigation on the Moon. Joanneum Research. Graz, 2015. 30 р.
- Микрин Е.А., Михайлов М.В., Орловский И.В., Рожков С.Н., Семенов А.С., Ларьков И.И. Назначение, принципы построения, характеристики и результаты летных испытаний многофункциональной аппаратуры спутниковой навигации АСН-К кораблей «Союз МС» и «Прогресс МС»//Материалы пленарных заседаний 9-й Российской конференции по проблемам управления, 4-6 октября 2016 г., Санкт-Петербург. ЦНИИ «Электроприбор», 2016. C. 5-17.
