Сравнительный анализ математических моделей судна с позиций управляемости по отклонениям

Автор: Пашенцев Сергей Владимирович
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Эксплуатация водного транспорта
Статья в выпуске: 4 т.20, 2017 года.
Бесплатный доступ
В работе показан выбор математической модели судна, с помощью которой в дальнейшем будет исследоваться процесс управления судном по отклонениям двух разнесенных точек диаметральной плоскости судна от некоторых линий, называемых прицельными. Рассмотрены две математические модели танкера, различающиеся структурно: по виду и набору дифференциальных уравнений для их описания, которые идентифицированы параметрически, т. е. найдены коэффициенты описывающих модель уравнений. Для оценки адекватности моделей проверена их работа на примере стандартного маневра "Зигзаг" с проведением сравнительного анализа результатов между собой и данными натурных испытаний. Вид маневра выбран исходя из близости характерных для него движений судна тем движениям, которые происходят при управлении судном по отклонениям. Дальнейшие исследования осуществлены посредством выполнения управлений по отклонениям относительно заданных прицельных линий. Введен показатель качества управления квадратичного вида, с помощью которого оценена эффективность управления каждой модели. В данном расчетном случае при исследовании сложных управлений танкера проекта 214 по отклонениям выбрана математическая модель типа "скорость – угол дрейфа – угловая скорость поворота", представленная японскими инженерами, которая дала оценки по качеству управлений, идущие "в запас", что позволит в дальнейших работах по данной тематике на основе этой математической модели получать необходимые результаты и принимать на их основе решения, приводящие к меньшим управленческим рискам.
Математическая модель судна, управление по отклонениям от прицельной линии, адекватность модели натурным испытаниям, качество управления адекватной модели
Короткий адрес: https://sciup.org/142212225
IDR: 142212225 | УДК: [656.61.052.4:517.958]:629.5.072.1 | DOI: 10.21443/1560-9278-2017-20-4-673-680
Текст статьи Сравнительный анализ математических моделей судна с позиций управляемости по отклонениям
Исследуя проблемы управления судном по отклонениям двух разнесенных точек его диаметральной плоскости (ДП) от линии, называемой прицельной (ПЛ), возможно использовать различные математические модели судна [1–3]. Принципиально их можно разделить на две группы, отличающиеся набором трех базовых дифференциальных уравнений первого порядка. Первая группа оперирует полной скоростью судна, углом дрейфа и угловой скоростью поворота вокруг вертикальной оси. Вторая группа описывает продольную и поперечную скорости судна и ту же скорость углового поворота. Кроме данных структурных особенностей существуют еще отличия параметрические: в моделях по-разному вычисляются параметры (коэффициенты) уравнений. Естественно, что это ведет к разному поведению моделей при их программных испытаниях даже при одинаковых условиях среды и нагрузок.
Основная цель работы – выяснить, какую модель следует использовать в ходе определения возможности и эффективности управления судном по отклонениям от прицельных линий. С этой точки зрения необходимо выбирать ту модель, которая дает более низкие оценочные показатели. Тогда можно утверждать, что в реальных условиях такая система управления для смоделированного судна продемонстрирует по крайней мере не худшие показатели. При этом нужно учитывать, что любая модель не будет полностью адекватной поведению моделируемого судна, т. е. каждая модель будет более адекватной определенному набору натурных испытаний судна, но не всем им одновременно. Именно поэтому следует ориентироваться не на натурные испытания, а на качество управления по отклонениям в модельных испытаниях.
Материалы и методы
В процессе исследований используются модели двух типов. Модель первого типа представлена многими авторами [3], которые по-разному описывают ее параметрически с учетом одинаковой структуры. Модель второго типа принято связывать с именем А. П. Тумашика [4]. Данная модель менее исследована, но ее преимущество состоит в отсутствии ограничений на угол дрейфа судна при работе в диапазоне углов 0—180 ° с каждого борта. Следовательно, только эта модель может описывать движения судна, близкие к движениям лагом (например, при швартовках).
Запишем уравнения для симметричных обводов судна, когда присоединенная масса λ 26 = 0. Тогда уравнения первой модели, не разделенные по производным от полной скорости и угла дрейфа, записывают так:
du о de ■ о I . / \■ о
—cose -u— sine + ( m, Ju® sine = X, dt dt J ( 22 ’ z
\ (du .de о I \
) —sine + u—cose + ( mi J u® cose = Y, ' V dt dt 4х7
( J ,66 ) d® z - ( ^ 22 - ^ 11 )у sin2e = M z .
Уравнения второй модели более громоздки, что обусловлено ее большей универсальностью:
- ( m 22 ) и y to +
C X3 C X 0 v 2 - C X 3 C X 0 vv, + b,v 2 + 2b2 -x/- x x 1 y 2 3
ρ a A VB v K
+ '-'AX 2 F rX + T E + F X ,
- ( m il ) U x to
vv
2 Y ® + C 2 |-y| - y -I6C 3
y yx
ρA L σ
2 + C AY
PA L a +
ρ a A VL v K 2 2
+ F rY + F Y ,
^ (2)
( J ) dto =
( z 66 ) dt
v 3 v 3 | v | v 3 v 4
2mi-x-y + m2--y + m3 ——16m4----6---+ Cm0Lto|to| + Cm„(v + Lto )sin(nQ)/n v4 v6
X
PALL + C^ P a A VL Lv K + Mr + Mz.
2 AM 2 r Z
В представлениях этих моделей m 11 и m 22 – "полные" массы судна в продольном и поперечном направлениях, т. е. с учетом присоединенных масс этих направлений; J z 66 – "полный" момент инерции относительно вертикальной оси. В модели (1) продольная ( X ) и поперечная ( Y ) силы и момент M z не раскрыты; в модели (2) выписаны явно их составляющие гидродинамического и аэродинамического характера. Остальные виды нагрузок даны в виде отдельных слагаемых, например F rX , F rY , M r – усилия и момент на рулевом органе (индекс r ). В этой модели явно выписаны и коэффициенты гидродинамических нагрузок, которые предстоит находить для конкретного судна при идентификации модели. Все обозначения вполне традиционны, что позволяет не описывать их подробно с целью экономии места для содержательных обсуждений. Уравнения модели (1) для выполнения численного интегрирования следует разрешить относительно производных, что приводит к такой их форме (3):
d υ dt
X Y m 2
=--- cose--Sine-- 22
m 11
m 22
m 11 m 22
m 2
11 v ω sin β cos β,
d B X . n Y n m2 cos 2 в - m 2 sin 2 в
— =--sine--cose + -^1--------22----- v®, dt m11 m22 m11m22
d ®. = ( m z + ( X 22 -Xn ) U^ sin2e)/ J г 66 .
dt 2
Результаты и обсуждение
Анализ адекватности моделей
Технологию, представленную в работе [5], используем в процессе идентификации двух моделей танкера 214 в балласте. Идентифицировав модели, т. е. рассчитав их параметры, необходимо оценить степень адекватности построенных моделей. Это возможно сделать посредством сравнения результатов натурных испытаний танкера проекта 214 (RN Arkhangelsk, RN Murmansk, RN Privodino) с итогами модельных испытаний.
Типовая запись стандартного маневренного испытания танкера проекта 214 "Зигзаг 10/10" представлена на рис. 1, из которой можно извлечь количественные данные, пригодные для сравнения: 1) период между первым и третьим зарыскиваниями, равный 3 мин 13 с – 50 с = 193 с – 50 с = 143 с; 2) величины зарыскивания, т. е. уход от заявленного начального курса в 180°, составляющие 21 и 15°, среднее зарыскивание составило 18°, средний курс судна 183°. Последнее согласуется с ветром и волнением порядка 4 баллов с направления 170°.
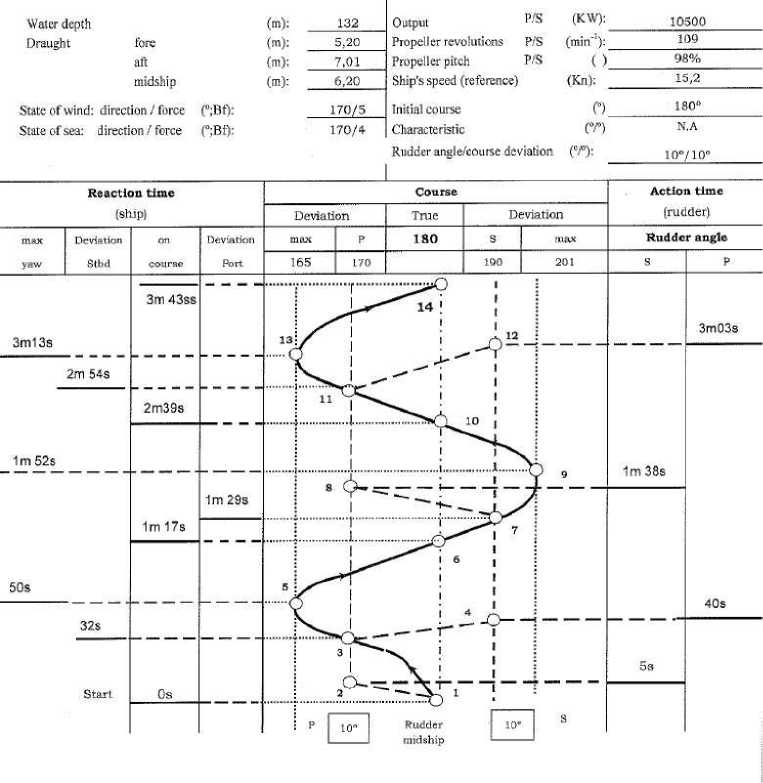
Рис. 1. Результат натурного испытания "Зигзаг 10/10" танкера проекта 214 в балласте Fig. 1. The result of the "zigzag 10/10" test of the project 214 tanker in ballast
Результаты модельных испытаний "Зигзаг10/10" двух идентифицированных моделей приведены на рис. 2 и 3: угловая скорость поворота, угол дрейфа и курс танкера (начальный курс составляет 60 ° ). Обе модели перед испытаниями были подвергнуты коррекции для большей адекватности натурным испытаниям. Так, в модели, представленной японскими инженерами [6], коэффициент рулевого устройства (РУ, руля) взят равным 2,3 (вместо 1,8), коэффициент С m β = 0,046 (вместо 0,076). В модели в перемещениях коэффициент руля взят равным 2,18, остальные коэффициенты не менялись. Рисунки не только позволяют оценить изменения курса во времени, но и демонстрируют большие возможности программного моделирования процесса, которыми не обладают натурные испытания. Все измерения производились в вычислительной среде VB6, а затем и в среде MathCad, в которую переносились соответствующие файлы для формирования графиков. Эти измерения показали следующее.
Модель, разработанная японскими инженерами, дает экстремальные значения курса 74-44 ° или 76-44 ° , т. е. среднее зарыскивание равно примерно 16 ° . Максимальный курс достигается в моменты времени 43 и 180 с, т. е. период процесса примерно равен 137 с. Это хорошо согласуется с результатами натурных испытаний, и можно считать данную модель адекватной в рамках располагаемой информации.
Модель в перемещениях показывает среднее зарыскивание порядка 12 ° и период колебаний 139 с. С этой точки зрения такая модель менее адекватна натурным испытаниям, но учтем, что она подверглась минимальной коррекции после идентификации. Тем не менее продолжим сравнение моделей и проверим, как они реагируют на управление по отклонениям, что и является основным предметом наших исследований. Управление по отклонениям двух разнесенных точек диаметральной плоскости (ДП) судна от прицельной линии возможно, если она определена и введена в решающее устройство, а навигационная спутниковая система (СНС) определяет на судне координаты двух разнесенных точек ДП. На основании этих данных
(постоянно обновляющихся) вычисляются отклонения O 1 и O 2 указанных точек от заданной ПЛ, с помощью которых формируется управляющий сигнал sig по принципу:
sig = a 1 O 1 – a 2 O 2 .
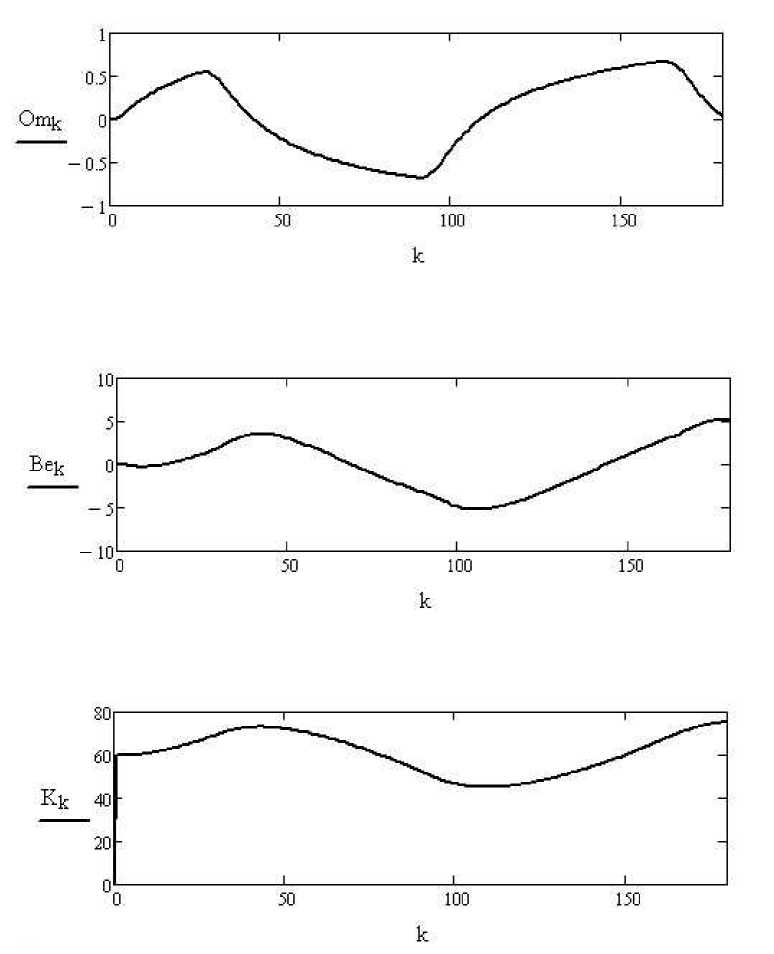
Рис. 2. Результаты испытаний модели, представленной японскими инженерами (угловая скорость, угол дрейфа и курс танкера)
Fig. 2. The results of model tests for the model of Japanese engineers (the angular velocity, the drift angle and the tanker course)
Управляющий сигнал передается на рулевое устройство, поворот которого приводит к возвращению судна на прицельную линию. Далее процесс управления судном циклически повторяется. Сравнивая модели между собой, следует оценить качество такого управления. Это можно сделать различными способами, среди которых выберем для нашей конкретной цели среднее квадратичное отклонение выбранных точек судна от установленной ПЛ, отнесенное к длине танкера L . Такой критерий выглядит следующим образом:
Q=\ £
k
О + о ) / L ,
n
где О 1 k и О 2 k – отклонения точек ДП танкера от прицельной линии в k -й точке процесса интегрирования, а сумма подсчитывается для всех таких точек в количестве n ; L – длина судна.
Испытаниям на управление по отклонениям подвергались две реферируемые модели в следующих условиях: начальное положение танкера – в точке (0, 0), прицельная линия идет из этой точки в точку (20, 20) (измеряется в километрах), т. е. угол ее наклона равен 45 ° . Начальный курс танкера равен 60 ° , что приводит к сильному маневру в окрестности начала координат.
Расчет критерия (качества) с учетом 1 000 с хода танкера дал такие результаты:
– для модели, представленной японскими инженерами, Q = 0,109;
– для модели в перемещениях Q = 0,055.
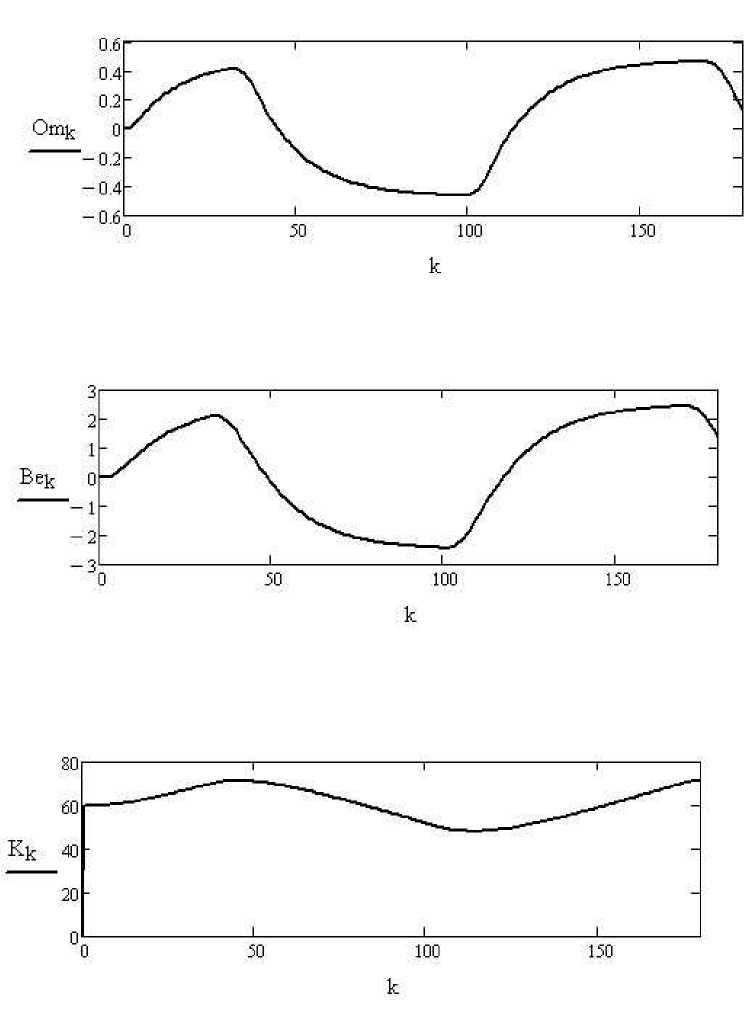
Рис. 3. Результаты испытаний модели в перемещениях (угловая скорость, угол дрейфа и курс танкера) Fig. 3. The results of model tests for the model in displacements (the angular velocity, the drift angle and the tanker course)
В дополнение к величинам критерия Q приведем в графической форме некоторые результаты испытаний управления моделей по отклонениям (рис. 4, 5). Они не слишком отличаются друг от друга визуально, но разницу в качестве управления практически в два раза фиксирует величина критерия качества Q (0,055 и 0,109).
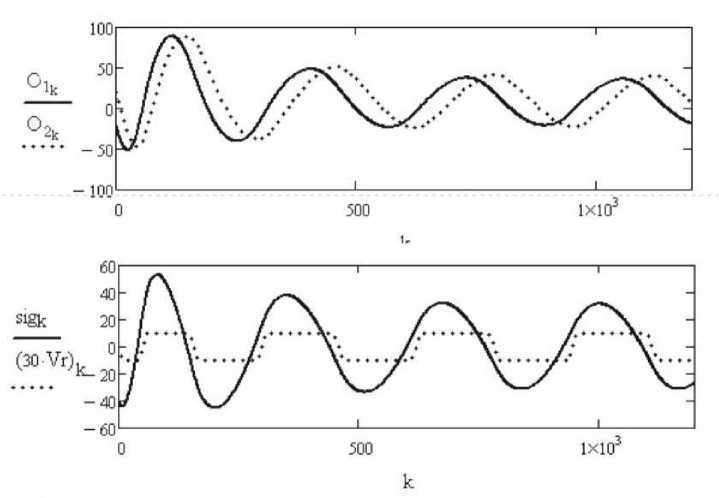
Рис. 4. Результаты испытаний управления первой модели по отклонениям (отклонения О 1 , О 2 , сигнал управления sig, скорость перекладки руля V r ) Fig. 4. The results of the first model control tests for deviations
(the deviations O 1 , O 2 , the control signal sig, the speed of rudder adjustment V r )
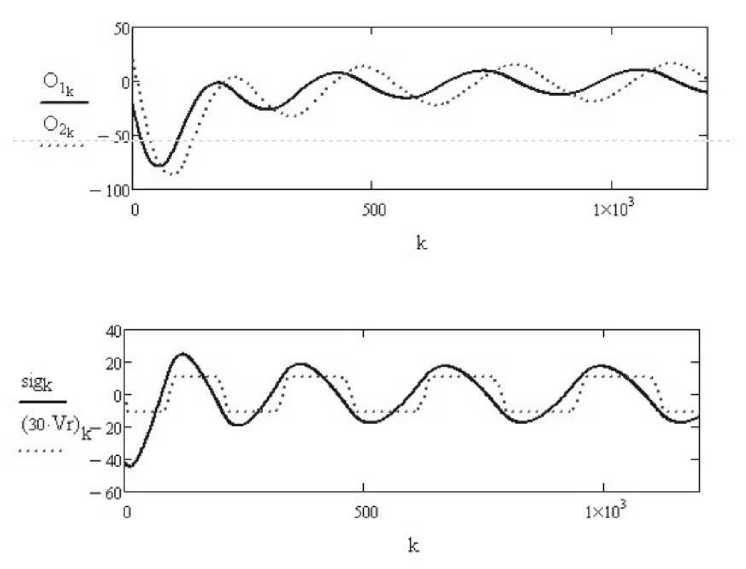
Рис. 5. Результаты испытаний управления второй модели по отклонениям (отклонения О 1 , О 2 , сигнал управления sig, скорость перекладки руля V r ) Fig. 5. The results of the second model control tests at deviations (the deviations O 1 , O 2 , control signal sig, the speed of rudder adjustment V r )
Выводы
В результате проведенных сравнительных исследований можно сделать вывод о том, что для дальнейшей работы по управлению буксирной системой для буксируемого судна – танкера проекта 214 – необходимо использовать модель первого типа, представленную японскими инженерами, с коррекцией двух ее параметров: коэффициента руля и коэффициента С m β . Логично предположить, что подобным образом следует осуществлять управление танкерами других проектов.
