Сравнительный анализ методов адаптации параметров регулятора системы управления робота-манипулятора

Автор: Галемов Р.Т., Масальский Г.Б.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 4 т.10, 2017 года.
Бесплатный доступ
При действии внутренних и внешних неконтролируемых воздействий управление многозвенным манипулятором требует постоянной адаптации регулятора. Предложены методы адаптации классического ПИД-регулятора на основе алгоритма поисковой оптимизации, а именно симплексного инвариантного метода. Структура предложенных алгоритмов совпадает со структурой известных алгоритмов на основе искусственных нейронных сетей. Рассмотрены две конфигурации адаптивного ПИД-регулятора: в первой осуществляется непосредственная настройка коэффициентов; во второй в функции ошибки слежения формируется дополнительное воздействие, которое суммируется с выходом ПИД-регулятора. В работе в качестве объекта управления использован двухзвенный робот-манипулятор с нагрузкой в схвате. Представлено сравнение траекторий движения робота с применением различных адаптивных регуляторов на основе нейронных сетей и симплексного инвариантного метода. Приведены результаты управления манипулятором с постоянной и переменной нагрузкой, определены зоны эффективного применения предложенных алгоритмов адаптации. Математическое моделирование показало, что предлагаемый метод эффективно решает задачи адаптации в условиях дрейфа параметров робота-манипулятора.
Робот-манипулятор, симплексный инвариантный метод, пид-регулятор, настройка параметров, нейронная сеть
Короткий адрес: https://sciup.org/146115895
IDR: 146115895 | УДК: 62-503.57 | DOI: 10.17516/1999-494X-2017-10-4-508-522
Comparative analysis of the regulator parameters adaptation methods of the control system of the robot manipulator
In case of action of internal and external uncontrollable influences the control of the multi-axis robot manipulator requires continuous adaptation of the controller. The methods of adaptation of the classical PID-regulator on the basis of a direct search method, namely, the simplex invariant method are offered. The structure of the offered algorithms is similar to the structure of the known algorithms on the basis of artificial neural networks. Two configurations of the adaptive PID-regulator are considered: in the first direct setup of coefficients is carried out; in the second an additional influence which is added to the PID-regulator output is created in the function of the error of tracking. In this paper the two-link robot manipulator with loading in a gripper is used as a control object. The comparison of the paths of the movement of the robot with use of different adaptive regulators on the basis of artificial neural networks and a simplex invariant method is provided. The results of the control of the robot manipulator with a permanent and alternating load are given, zones of effective application of the offered adaptation algorithms are defined. Mathematical simulation showed that the offered method effectively solves adaptation problems in the conditions of drift of the parameters of the robot manipulator.
Текст научной статьи Сравнительный анализ методов адаптации параметров регулятора системы управления робота-манипулятора
Цель данной статьи – выбор эффективной системы управления манипулятором, основанной на адаптивном ПИД-регуляторе. Робот-манипулятор есть нелинейная динамическая система, и для его управления часто используют методы, основанные на линеаризации обратной связи [1]. Для эффективного управления необходимо знать точные динамические характеристики манипулятора, такие как, например, тензоры инерции звеньев при переменной нагрузке и коэффициенты трения в сочленениях. В реальной практике определение значений этих характеристик крайне трудозатратный процесс. Их влияние соответствует дрейфу параметров объекта управления. Один из подходов адаптивного управления подобными системами является ПИД-регулятор с настройкой параметров в реальном масштабе времени. Настройка регулятора может производиться нейронной сетью [2, 3] , нечеткой логикой [4], нейро-нечеткой сетью [5].
В данной статье разработана процедура адаптации параметров регулятора на основе симплексного инвариантного метода [6], приведены результаты моделирования и сравнение с другими системами управления манипуляторами, основанными на ПИД-регуляторе.
Методы ада пт-ации
В общем случае динамика n -звенного манипулятора описывается нелинейным уравнением
T (t ) = M ( q ( t )) • q ( t ) + V ( q ( t ), q ( t )) + G ( q ( t )) + F ( q ( t )), (1)
) где T (t ) - вектор) nx 1 моментов в сочленениях, Нм, q ( t ) - вектор nx1 угл овых ко ординат в сочленениях, рад; M ( q ( t )) - матрица nxn инерций звеньев манипулятора; V ( q ( t ), q ( t )) - вектор nx 1 кориолисовых и центробежных сил; G ( q ( t )) - вектор nxl гравитационных сил; F ( q ( t )) - вектор n× 1 сил трения в сочленениях.
Параметры уравнения (1) зависят от многих неконтролируемых возмущений, например тензоры инерции звеньев при переменной нагрузке и коэффициенты трения в сочленениях, а следовательно, изменяются во времени с различной интенсивностью. В этой связи разработаны различные подходы адаптации параметров системы управления манипулятором [2-5].
Рассмотрим непрерывную сис тем у управлен ия на о снове классического ПИД-регулятора (рис. 1).
ПИД-регулятор реал изует упра вление
t
т ( t ) = ( К , 0 . Л К p ( t )) ■ е ( t ) + ( К i 0 +л к i ( t ) )J е ( t ) d . К d , + ЛК , ( t ) )-d>. (2)
где K р0 , К i0 , K d0 - векторы nx 1 про порциональных, интегральных и дифференциальных ко -эффициентов регулятора соответственно; А К ( t ) р , АК ,. t ), А К d( t ) - векторы nx 1 приращ™ коэффициентов регулятора; e (t ) = ( q d ( t ) - q ( t )) - вектор nx 1 ошибки слежения, рад; q d ( t ) - вектор nx l за данных значений угловых координат, рад; q ( t ) - век тор nx1 текущих значений углов ых координат, рад; q ( t ) - измеренный ве ктор nx 1 значений скоростей, рад /с.
Адапт ац ия параме тров р егул ятора ре али з уе тся в со отве тс твии с кри терием (ц еле во й -Л функцией)
Q ( t ) = 1 е 2 ( t ) ^ min , (3)
2 ЛК( t )еК где К = {Л К (t): Л- К (t) е E 3, Л К т1п < Л К (t) < Л К max}.
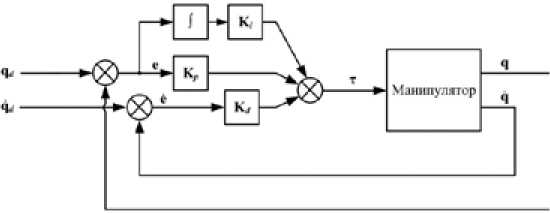
Р ис. 1. Структурная с хема не прерывной систем ы управлен ия манипулято^ром на основе класс ичес кого ПИД-регулятора без адаптации (ПИД)
Первая схема адаптации предусматривает коррекцию векторов приращений коэффициен тов регулятора относительно векторов базовых значений коэффициентов Kp0, K/0, Kd0 (рис. 2).
При настройке регулятора нейронной сетью ПИД-регулятор представляет собой однослойную нейронную сеть (рис. 3).
В качестве адаптера испо льзуется а лгоритм об ^ ратного распростр анения о ши бки на основе градиен тного м етод а [3].
Настройка п араметров р егулятора п рои сходит по в ыражению d Qj Kpj (t) = Kpj о + npj ' J о dKpj
' , d Q
Кц(t) = Кцо + n -J Ldt, о dKij
K4j(. t) = Kdjo + ndj‘j,
0 d d j = 1, n -номер сочленения,
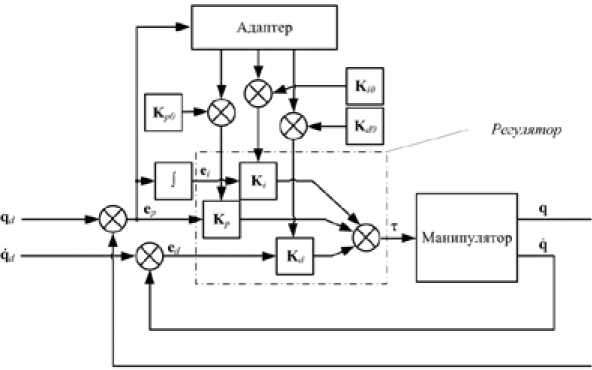
Р ис. 2 . Структурна я схема ад апти вной систем ы управлен и я с настройкой п а ^ ра^метров ПИД-ре г улятор а нейронной сетью (ПИД-НС)
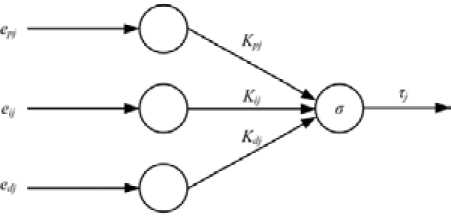
Р ис. 3. Структ^ура нейронно й сет и ПИД-регулятора где npj, nj, Пdj — векторы их1 скоростей обучения пропорциональной, интегральной и дифференциальной с оставляю щих для j-го с очленения соот ве тственно.
Данный алгоритм является нелинейным и способен обучаться во время работы. Рассмотрим в озм ожн ость испол ьз овани я в качест ве адаптера метод п оис ковой о п тимиз аци и. Целев ая функция (3) зависит от времени, и закон её изменения априори неизвестен. Большинство методов оптимизации неэффективны в условиях дрейфа целевой функции, а при определенных скоростях дрейфа и неустойчивы. Если в качестве контролируемого возмущения использовать время проведения эксперимента в текущей точке, то можно применить симплексный инвариантный метод (СИМ) [6].
Процесс поиска СИМ реализуется в дискретные моменты времени t k = к • T 0 , где Т 0 - интервал дискретизации; к - шаг поиска (дискретное время). На интервале Т 0 происходит вычисление целевой функции и принятие решения о направлении поиска в пространстве приращений A K .
Обобщенно алгоритм метода:
-
1) на к -м шаге поиска вытчисляется целевая функция Q ( к ) и фиксируется время её вычисления z ( к ). Предполагается, что время измерения невязки e ( к ) и функции Q ( к ) совпадают;
-
2) аппроксимируем на к -м шаге целевую функцию Q ( к ) выражением
Q (к ) = a T х,(5)
рассчи тываетс^я текущ а^я оценк а д рейфа ц елевой ф ункции рекурр ен тным м етодом н аименьш их ква дратов;
a(k) = a(k -1) + тСk -1), X( k) [Q(k) - aT (k -1) • x(k)],(6)
1 + x' (k)• C(k-1)• x(k)LJ где x(к) = (AKp (к) A Ki (к) AKd (к) Az (к))T - составной век тор воздействий; a( к) = (a 1( к) а 2(к) а 3(к)) T -составной вектор оценок целевой функции на к-м шаге поиска; ai(к) - оценки зависимости целевой функции от приращений параметров регулятора на к-м шаге поиска; b(к) - текущая оцепка дрейфа целевой функции; C(к-1)- ковариационная матрица оценок.
В области экстремума целевой функции оценки a 1 ( к ), а 2 ( к ), а 3 ( к ) близки к нулю. Это является при зна ком дости жения о бласти э кстремум а;
-
3) вычитание влияния дрейфа на значение целевой функции в вершинах текущего симплекса
Q j ( k ) = Q * — b (к ) 'А Z j ,j = 1,..., m + 1, J * s ; (7)
-
4) принятие решения о направлени!и поиска, а именно отражение худшей точки (вершин ы, имеющей макс и мальное значение Q j ( k ));
-
5) переход к пункту 1.
Эффективность алгоритма зависит от длины ребра симплекса (приращения K p , K i , K d ), скорости дрейфа, уровня помех, а 'также от процедур адаптации парамет ров и стратегии поиска.
Вторая схема адаптации предполагает непосредственное воздействие на формируемое управление вектором 1моментов T ( t ) в сочленениях. Структурная схема такой адаптивной САУ с исп ользов анием нейр онной сети п рив едена на р ис. 4 [ 7].
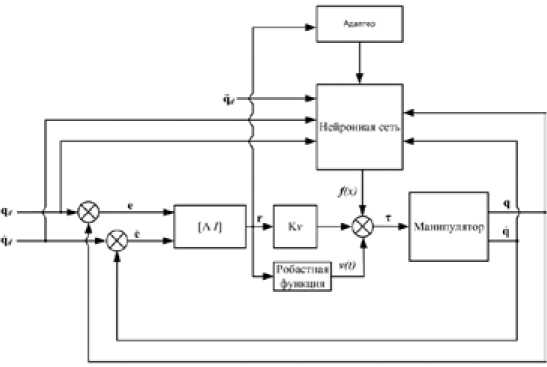
Р ис . 4. Схем а адаптивной С ^ АУ с ко рректировкой векто ра момент ов τ нейронн ой сетью (АдСА ^ У-НС)
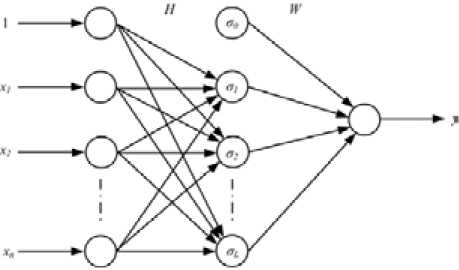
Рис. 5. Струк тура нейронн ой сет и
Структура нейронной с ети и зображена на рис. 5.
Управление рассчитывается по формуле:
e ( t ) = q ( t ) d - q ( t ),
r ( t ) e ( t ) + Л е ( t ) (8)
τ(t) = f (x(t)) + Kv⋅ r(t) - v(t), где q(t) - вектор nxl, рад; e(t) - вектор ошибки nxl, рад; Л - по ложительно определенная квадратная матрица параметр о, а» n; К,- Диагонал мая матри ца параметров внешнего конту ра; v(,) -функция, обеспечивающая робастность; x - входной вектор, состоящий из (qd, qdT, qdT, eT, eT)T размер)ностью nx x 1, nx = 5 • n, f (x) - описывается уравнением f (x) = W ■ o(H ■ x), (9)
где W - 1матрица весовых коэффициентов выходного слоя; H - матрица весовых коэффициен-тов скрыт ого слоя; <г ( . ) - активационная функция нейронов скрыто го слоя.
Весовы е коэффи циенты изменяют ся по следу ющим пр ав илам:
W = F ⋅ σ ⋅ r T
H=G⋅ x ⋅ (σ'TW⋅r) T где F и G - положительно определенные диагональные матрицы коэффициентов; о' - произво-д н ая от акт и в ац ионн ой ф^у н к ци и. П^ од ро б ное оп и са ни е алг о рит ма да^н о в [7].
,-..,,„
Дл я р еали зац ии подобной ада^пт ивн ой СА ^ У на б азе СИ М пред лагает ся стр ^ уктурная схема, приведенная на рис. 6. Компенсирующее воздействие Ат i ( к ) формируется симплексным инвари-антным методом по вектору ошибок e . В данной схеме ПИД-регулятор является классическим и описывается уравнением (2). При такой схеме возможно реализовать СИМ в n -мерном про-странс тв е и ли n СИМ в о^д ном ерном пр о с тра нстве. В к ачес тве цел ево й ф ункц ии в постановке зад ач и адаптаци и (^3) испо льзуе тся ф ^ у нк ция
Q ( t ) = 1 e 2 ( t )
сим 2 , об еспечивающа^я постоянс т во градиен та в п ро цессе поиска.
Ис с ледовани е методо в адаптации
Проведем сравнительный анализ приведенных схем адаптации на двухстепенном манипуляторе (рис. 7), динамика которого подробно описана в работе [3], с параметрами: a 1 = 1, м; а 2 = 1, м; m 1 = 2, кг; m 2 = 0.5, кг; m 1 = 3.75, кг; B = 0.3, где a j - длина j -го звена, ш у- - масса j -го звена, m, - масса груза в последнем звене, B - коэффициент трения в сочленениях.
Заданна^ я траектория описывается гар моническими во здействиями:
q d 1 = 20sin(o>t ), q d 2 = 15sin(t yt ), co = 0.2тт,
dq d 1 dq d 2
q d 1 " ’ q d 2 "
dt dt
В качестве контролируемого возмущения прим ем время z ( к ) = к , к = 0... N , N = 1000. Время дис кр етизац ии T ^ 0 = 0.0 2 с , время моде ли рова н и я T =20 с.
Эф фектив ность мето^да адаптации оце нивается для каждог о сочленен ия функцией
N
J, = м Е V е ^( k ), j = 1’-’ n ’" (13)
j N»1 j
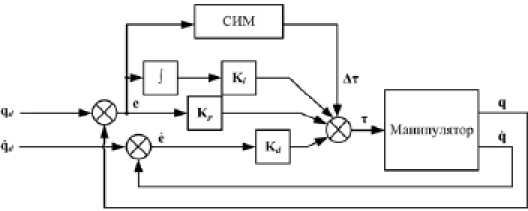
Рис. 6. Схема адаптивной САУ с корректировкой вектора моментов τ с использование СИМ (АдСАУ-СИМ)
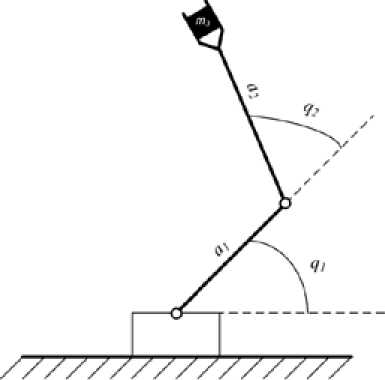
Р ис. 7 . К инематиче ская схе ма двухзвенного манипулятора
а ^ ) б)
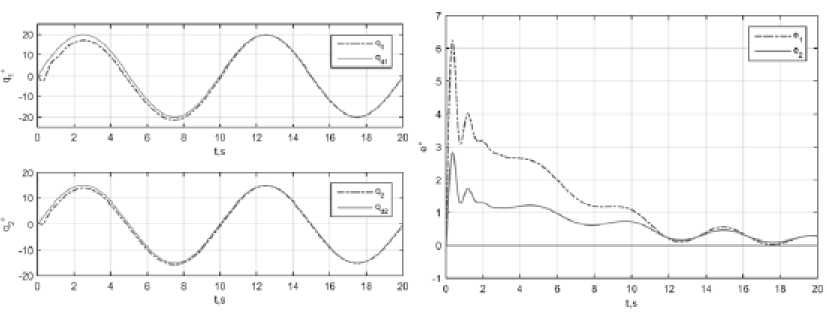
Ри с. 8 . Качество слежения П ИД: а – з ад анные и ре аль ные углы с очлен ений; б – ошиб ки с лежения в сочленениях
Для большей наглядности при вычислении показателя управления значение ошибки пере-водитс^ я из радиан в градусы, поэтому качество (13) представлено на рисунках и в таблицах в градусах.
Обычный ПИД-регулятор без адаптации ( ПИД) (см. рис. 1). Значения коэффициентов регулятора (2) равны K p 0 = (1000 1000) T , K , 0 = (100 100) T , K d 0 = (75 75) T , A K p = A K , = AK , = (0 0). Результат ы раб оты П ИД-р егу^лятора для д вух звеньев показаны на рис. 8.
На ри с. 8 види м, что ошибка слежения первого сочленения всегда больше ошибки второго сочленения.
Эффективность адаптации J = ( J । J 2 ) T = (2.1635 0.9102) T , град.
ПИД-регулятор с настройкой параметров нейронной сетью ( ПИД-НС ) (см. рис. 2). Нейронная сеть (см . рис. 3) в ыполняет фу нкцию регул ято ра . Активац ионная фу нкци я выходного нейрона
CT( x) =
2(1 - e a )
+ e а ) .
Функцию адаптера выпо.шяют выражения (4) с целевой функцией (3). Начальные значения коэффициентов регулятора K p 0 = (1000 1000) T , K i = (100 100) T , K d = (75 75) T , векторы скоростей обучения равны n p = (600 800) T , П = (500 600) T , П d = (800 800) T .
Резул ьтаты р аботы алгоритма п редставлены на рис. 9.
На рис. 9 видим, что ошибка слежения ПИД-НС в целом идентична ошибке ПИД-р егулятора, но спадает в о бла сть ма лых значений в два раза быстрее.
Эффективность адаптации J = ( J । J 2 ) T = (1.4089 0.7173) T , град.
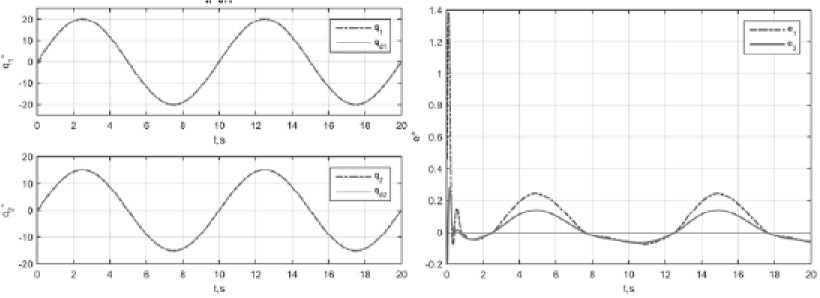
Адаптивная САУ с корректировкой вектора моментов т нейронной сетью ( АдСАУ-НС ) (см. рис. 4). Для моделирования использовали следующие значения параметров: количество слоев нейронной сети L = 2, количество нейронов во входном, скрытом и выходном слоях равны соответственно 1 1 =10, 1 2 =10, 1 3 =2, K v = 75 • 1 2 х 2 , А = 13.3 • 1 2 х 2 , 1 2 х 2 — единичная матрица размером 2 х 2, W - нулевая матрица размерностью 10 х 11, H - нулевая матрица размером 10 х 11.
Результат исследования АдСАУ-НС представлен на рис. 10. Регулятор в пределах 1 с обеспечивает подстройку дополнительного воздействия Δ τ и удерживает ошибку слежения в области нуля. ПИД-регулятор с нейронной сетью имеет высокие показатели адаптации J = ( J , J 2 ) T = (0.11 0.07) T , град.
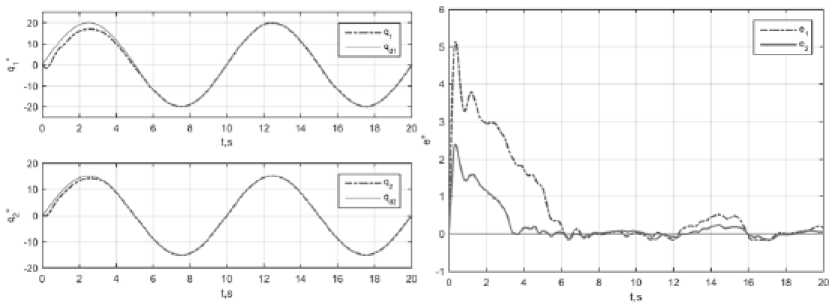
ПИД-регулятор с корректировкой вектора моментов дискретной нейронной сетью ( АдСАУ-ДНС ) . Система управления имеет такую же структуру, как АдСАУ-НС, за исключением нейронной сети, которая является дискретной. При моделировании использовалась однослойная нейронная сеть с l =25, А = 13.3 • 1 2 х 2 и временем дискретизации T 0 . Результаты работы АдСАУ-ДНС приведены на рис. 11.
Эффективность адаптации J = ( J । J 2 ) T = (0.44 0.25) T , град.
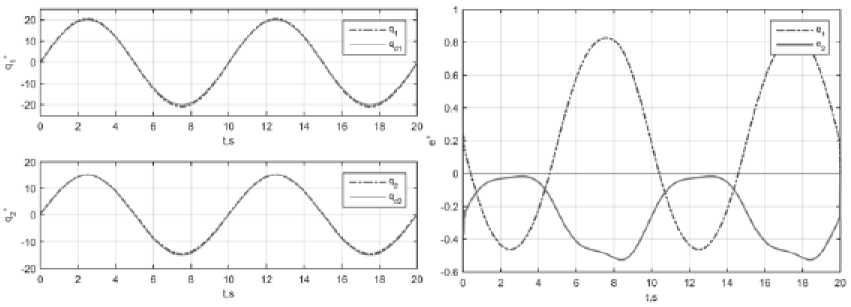
ПИД-регулятор с адаптацией симплексным инвариантным методом ( ПИД-СИМ ) (см. рис. 2). Регулятор – классический ПИД-регулятор (2). В качестве адаптера используется СИМ. Для каждого звена ведется независимый процесс адаптации по критерию (11). Поиск
а)
б)
Рис . 9. Качество с лежения ПИ Д-НС: а – з ад ан ные и реал ьн ые углы со ^ членен ий; б – ошибки с ле жения в сочленениях
а)
б)
Рис. 10. К ачество уп равления АдС^АУ-НС: а – зад ан н ые и реальн ые углы сочле нений ; б – ошибки сл еж е ния в сочленениях
а)
б)
Ри с. 11 . Качество управления А дСАУ-ДНС: а – з ад ан ные и реал ьн ые углы со^членен ий; б – ошибки слежения в сочленениях ведется в пространстве приращений (AKp, AKi, AKd). Начальны!е условия идентичны регулятору с настройкой нейронной сетью: базовые значения коэффициентов регуляторов равн ы Kp0 = (1000 1000)T, Ki0 = (100 100)T, Kd0 = (75 75)T. Стартовая точка симплекса находится в начале системы! координат пр) остранства поиск а. Начальная длина ребра симплекса равна L0 = (42 42) для пер в ого и вто р о^го зв еньев со ответственно и рассчиты вается исхо^дя из количест ва ша^гов поиска, пространственных ограничений пространства поиска (10) и условия, что начальная точка поиска лежит в центре этого пространства [8]. Конечная длина ребра симплекса выбиралась из минимально до пустимой о шибки поиска и равна LN = (0 .1 0.1) для обоих сочленений. Для оценки скорости дрейфа экстремума функции (11) используется рекуррентный алгоритм (6). Результаты работы приведены на рис. 12.
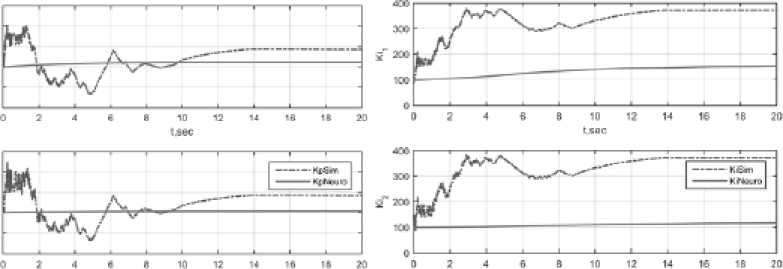
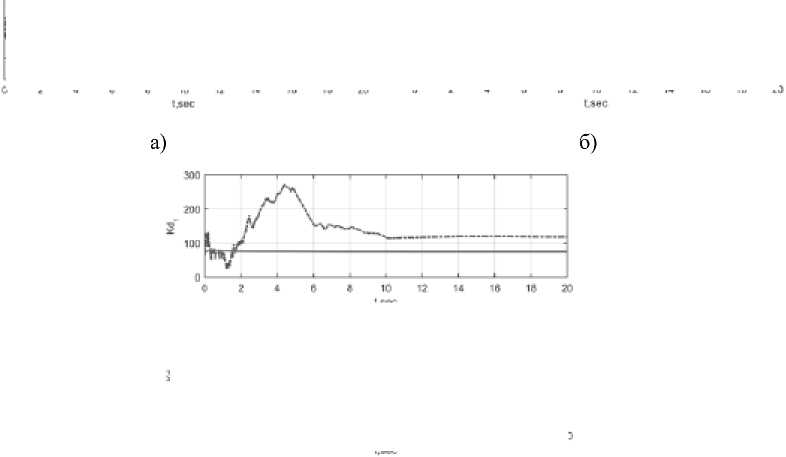
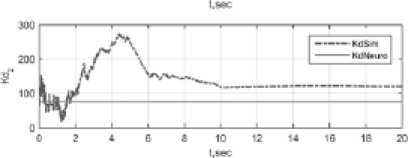
Дин ами ка измене ни я параметров при настройке ПИ Д- НС и ПИ Д-СИМ показана на рис. 13.
а)
б)
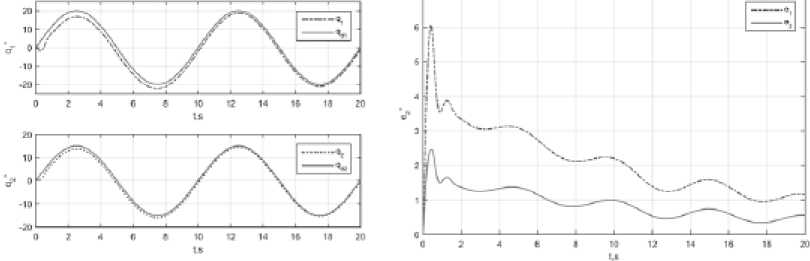
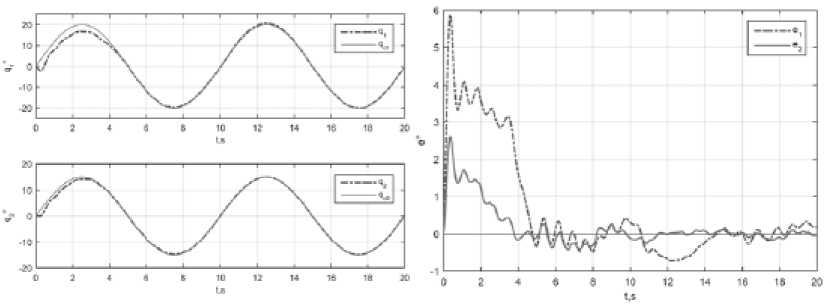
Рис. 12. Качество управления ПИД-СИМ: а – заданные и реальные углы сочленений; б – ошибки слежения в сочленениях

WOO
“

100(1
Й5Й
ООО
в)
Рис . 13. Динамика па ^ раметров при настр ойке нейрон ной сетью (не прерыв ная линия) и сим плексным инвариантным методом (пунк тирная лин ия): а – проп орционал ьн ый; б – интегральный; в – дифференциальный
Эффективность адаптации J = ( J । J 2 ) T = (0.750 8 0.3375) T , град. ПИД-СИМ показывает более высокую скорость достижения экстремума целевой функции по сравнению с аналогичным регулятором, использующим нейронную сеть. Это является следствием более активного изменения параметров во время настройки. Как видим на рис. 12 и рис. 13, при большой ошибке слежения происходит настройка, при которой параметры ПИД-СИМ изменяются в большем, чем у ПИД-НС, диапазоне значений. Чем больше значение ошибки слежения, тем больше значение параметров, что позволяет ПИД-СИМ быстрее устранить эту ошибку. Когда ошибка слежения близка к нулю, параметры ПИД-СИМ уменьшаются и в последующем либо не меняются, либо меняются незначительно.
Адаптивная САУ с корректировкой вектора моментов т с использование СИМ ( АдСАУ-СИМ )
Параметры ПИД-регулятора равны базовым значения ПИД-НС, стартовая точка симплекса находится в начале координат поиска. Для оценки возмущения используется рекуррентный алгоритм (6). Для большей гибкости поиска для каждого звена применен одномерный симплекс. Начальная и конечная длины ребра симплекса вычисляется по тому же принципу, как для ПИД-СИМ, и равны L0 = (0.1 0.6), LN = (0.1 0.1). Результаты моделирования представлены на рис. 14.
Качество управления J = ( J । J 2 ) T = (0.968 0233) T , град. АдСАУ-СИМ показывает схожую с ПИД-СИМ динамику ошибки при меньшем размере пространства поиска.
Определим частоту задающего воздействия, при которой обеспечивается устойчивость адаптации. Работоспособность регуляторов проверена при следующих значениях угловой скорости ω = {0.2, 0.4, 1, 2, 4, 10} в оздействия (12). Резу^льтат ы модел ирования пред ставлены на рис. 15.
Как видим на рис. 15 а на низких частотах входного сигнала ПИД-СИМ и ПИД-НС показывают со поставиму ю ошибку, н о с возраста нием ча стоты система с ад аптацией ней рон ной се тью теряет устой чиво сть, а регуля то^р с адап тацией СИМ при схожих условиях сохраняет
а) б)
Рис. 14. Качество у правления Ад САУ-СИМ: а – з ад ан ные и реал ьн ые углы со члене ний; б – ошиб ки слежения в сочленениях
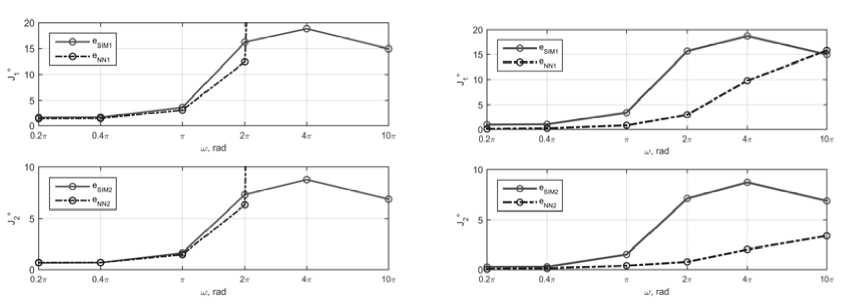
а)
б)
Ри с. 15. Среднекв адратичная ошибка упр авлени я в зависимости от час тоты задающег о воздействия для настройки ПИД-регулятора (а), для вычисления дополнительного воздействия Δτ (б)
а)
б)
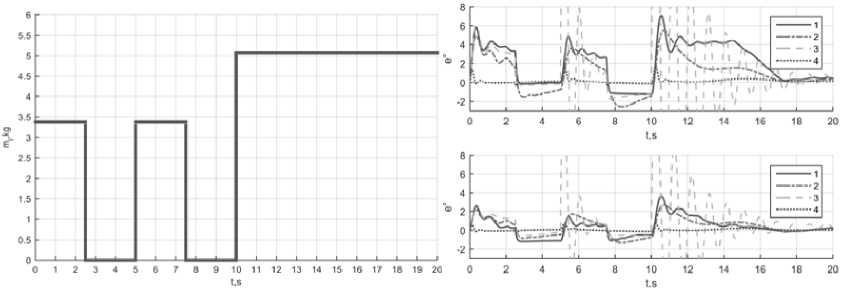
Рис. 16. Упр авление с переменной м ассой: a – гра фик измене ния м ассы; б – ошибка сле дования по траектории манипулятора с изменяющимися параметрами: 1 – АдСАУ-СИМ; 2 – П ИД-СИМ; 3 – ПИД-НС; 4 - АдСАУ-НС
устойчивость адаптации. Рис. 15 б показывает, что нейронная сеть обеспечивает более высокую точность управления на вы соких част отах, чем СИМ .
Проведены испытания алгоритмов в условиях изменений параметров манипулятора, а и менно масс ы груза m l , приложен н ой к коне^ чному зве ну манипу^лятора. Парам е тр изменяется по следую щему зако ну:
3,38 кг , при t < 2.5;5 < t < 7.5
m l = ^ 0 кг , при 2,5 < t < 5;7.5 < t < 10
5.07 кг , при 10 < t < 20
Графики ошибок сложения при,едоиы и, рис. 16 6 . Из розультато, моделирования следует, что АдСАУ-НС меньше всего подвержен влиянию изменения массы в схвате. ПИД-СИМ – 520 –
Показатели эффективности методов адаптации
Результаты работы рассматриваемых алгоритмов с постоянной массой нагрузки сведены в таблицу для удобства сравнения в порядке убывания.
При сравнении можно выделить АдСАУ-НС для настройки схемы с дополнительным воздействием и ПИД-СИМ для настройки параметров регуляторов, так как они показали наибольшую эффективность среди алгоритмов адаптации на рассмотренных схемах управления.
Заключение
Для проведения сравнительного анализа методов адаптации параметров регулятора системы управления робота-манипулятора:
-
• разработано программное обеспечение известных методов адаптации в среде MATLAB;
-
• разработано алгоритмическое и программное обеспечение метода адаптации на базе симплексного инвариантного метода;
-
• выделены зоны эффективного применения исследованных методов адаптации как первый шаг в формировании интеллектуальной системы управления роботом-манипулятором.
Проведенные исследование показали, что настройка параметров при помощи симплексного инвариантного метода приводит к управлению, которое обеспечивает ошибку на уровне адаптивных регуляторов на основе нейронных сетей. Установлены приоритеты использования алгоритмов при различных схемах управления.
Предлагаемые регуляторы, как и нейронные сети, не требуют знания динамических характеристик робота, и благодаря настройке в реальном времени система не теряет устойчивость даже при быстрых изменениях параметров манипулятора. Характерная черта рассмотренных адаптивных регуляторов – отсутствие необходимости в предварительном сборе данных и настройке параметров до начала работы. Преимуществом регуляторов, основанных на СИМ, является простота операций вычисления, что упрощает их задачу реализации во встроенных системах.
Список литературы Сравнительный анализ методов адаптации параметров регулятора системы управления робота-манипулятора
- Lewis F.L., Dawson D.M., Abdallah C.T. Robot manipulator control: theory and practice. CRC Press, 2003
- Al-Khayyt S.Z.S. Tuning PID Controller by Neural Network for Robot Manipulator Trajectory Tracking. Al-Khwarizmi Engineering Journal, 2013, 8(1), 19-28
- Razmi H., & Kashtiban A.M. Nonlinear PID-based analog neural network control for a two link rigid robot manipulator and determining the maximum load carrying capacity. International Journal of Soft Computing and Engineering, 2012, 2(1), 228-234
- Tang K.S., Man K.F., Chen G., & Kwong S. An optimal fuzzy PID controller. IEEE Transactions on Industrial Electronics, 2001, 48(4), 757-765
- AL-Saedi M.I., Wu H., & Handroos H. ANFIS and fuzzy tuning of PID controller for trajectory tracking of a flexible hydraulically driven parallel robot machine. J. Autom. Control Eng, 2013, 1(2), 70-77
- Круг Г.К., Масальский Г.Б. Симплексный инвариантный метод экспериментальной оптимизации. Вопросы кибернетики, планирование эксперимента и оптимизация в системах управления, под ред. Г.К. Круга, А.П. Вощина, 1981, (84), 3-32
- Lewis F.W., Jagannathan S., Yesildirak A. Neural network control of robot manipulators and non-linear systems. CRC Press, 1998
- Дамбраускас А.П. Симплексный поиск. М.: Энергия, 1979, 13, 175
