Сравнительный анализ расчетных и экспериментальных исследований гидродинамических воздействий на модель возвращаемого аппарата с неработающей двигательной установкой при посадке на воду

Автор: Дядькин Анатолий Александрович, Павлов Александр Олегович, Симакова Татьяна Владимировна
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Аэродинамика и процессы теплообмена летательных аппаратов
Статья в выпуске: 3 (18), 2017 года.
Бесплатный доступ
Для разрабатываемого РКК «Энергия» многоразового пилотируемого корабля «Федерация» планируется использование парашютно-реактивной системы посадки, задачей которой является обеспечение близкой к нулю скорости движения возвращаемого аппарата на момент касания посадочной поверхности. В штатных ситуациях посадка аппарата осуществляется на подготовленные грунтовые площадки. В нештатных ситуациях аппарат сможет совершать посадку в том числе и на воду. В этом случае для проектных исследований необходимо знание уровней гидродинамических воздействий на корпус аппарата и динамики его поведения в водной среде. Ввиду большого разнообразия возможных режимов посадки на воду поиск требуемых характеристик традиционным экспериментальным путем, использовавшимся при создании кораблей Apollo и «Союз», не рационален прежде всего из-за большого потребного объема испытаний и их ограниченной информативности. Поэтому целесообразно применение компьютерного моделирования процесса посадки в современных программных комплексах с предварительной их валидацией. В данной работе представлены результаты тестирования программного комплекса FlowVision разработки ООО «ТЕСИС» с использованием экспериментальных данных, полученных при модельных испытаниях командного модуля корабля Apollo. Представлены данные по изменению давления на поверхности аппарата в процессе погружения и динамике его поведения в водной среде. Продемонстрирована целесообразность использования данного комплекса для исследований процесса посадки возвращаемого аппарата корабля «Федерация».
Приводнение, возвращаемый аппарат, верификация
Короткий адрес: https://sciup.org/143164939
IDR: 143164939 | УДК: 629.78.087:538.58
Comparative analysis of computational and experimental studies of hydrodynamic loads on a model of a descent vehicle with inactive propulsion system during a splashdown
The reusable manned spacecraft Federatsiya that is being developed by RSC Energia is supposed to use a landing system based both on parachutes and rocket propulsion, which is expected to achieve an almost zero velocity of the spacecraft at touchdown. ln nominal situations, the spacecraft lands on specially prepared unpaved ground. ln off-nominal situations the spacecraft may have to land on all kinds of surfaces, including water. ln that case, conducting design studies requires the knowledge of hydrodynamic loads on the spacecraft body and its dynamic behavior in water. ln view of the existence of a great variety of splashdown modes, searching for the required parameters using the traditional experimental method that goes back to the development of the Apollo and Soyuz spacecraft is impractical, mostly because of the large scope of required tests and their limited informative value. Therefore, it stands to reason to run computer simulations of the splashdown in state-of-the-art software packages, having done their preliminary validation. This paper discusses the results of testing the FlowVision software package developed by LLC TESlS using experimental data, obtained in tests on the models of Apollo Command Module. It presents data on pressure variations on the spacecraft surface in process of its immersion and its dynamic behavior in water. It demonstrates the advisability of using this package for studying the process of landing of the descent vehicle of the Federatsiya spacecraft.
Текст научной статьи Сравнительный анализ расчетных и экспериментальных исследований гидродинамических воздействий на модель возвращаемого аппарата с неработающей двигательной установкой при посадке на воду
Одним из важных вопросов, возникающих при разработке многоразовых пилотируемых кораблей, является вопрос возвращения на Землю и обеспечения мягкой посадки.
Возвращаемый аппарат (ВА), входящий в состав разрабатываемого РКК «Энергия» пилотируемого транспортного корабля нового поколения «Федерация», оснащен парашютно-реактивной системой посадки, включающей в себя посадочную твердотопливную двигательную установку [1], и может совершать посадку как на подготовленные и неподготовленные грунтовые площадки, так и на воду.
В данной работе рассматривается режим посадки ВА на воду с неработающей двигательной установкой в условиях отсутствия морского волнения (в штиль). Аналогичным образом осуществляется штатная посадка на воду командных модулей кораблей Apollo [2] и Orion [3].
Исследование гидродинамических воздействий на ВА при этом режиме посадки и динамики движения аппарата в процессе приводнения осуществляется с использованием компьютерного моделирования. Для этих целей выбран программный комплекс (ПК) FlowVision [4] разработки ООО «ТЕСИС», который хорошо себя зарекомендовал при промышленном решении задач внешнего обтекания тел различной конфигурации, включая ВА, потоком вязкой жидкости. Программный комплекс адаптирован к решению данной задачи и позволяет проводить исследования аэродинамических характеристик и воздействий в условиях перехода из воздушной среды в водную [5].
С целью принятия решения о целесообразности использования ПК FlowVision для решения задачи приводнения ВА проведено его тестирование с использованием модельных и натурных данных, полученных в процессе разработки и отработки корабля Apollo [2]. При тестировании проведено сравнение расчетных и экспериментальных значений (уровней) гидродинамических воздействий на аппарат в процессе приводнения, а также параметров движения ВА в водной среде.
Модельные эксперименты для корабля Apollo
В 1967 г. в NASA проведены модельные экспериментальные исследования посадки командного модуля (КМ) корабля Apollo («Аполлон») [2]. Для данного аппарата штатным случаем посадки является посадка на воду без использования двигателей мягкой посадки. Допустимые вариации скорости аппарата на момент приводнения составляют для горизонтальной компоненты скорости 0…15 м/с, а для вертикальной — порядка 9 м/с.
Аппарат в штатном режиме совершает посадку с ненулевым углом входа α (угол между продольной осью аппарата и местной вертикалью) с целью уменьшения испытываемых экипажем перегрузок.
Параметры модели
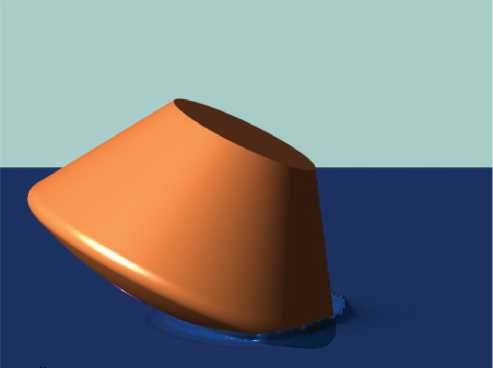
В экспериментах использована динамически подобная модель КМ масштаба 1:4 (рис. 1, а). Полученные экспериментальные результаты пересчитывались на натурные условия. В отчете [2] приведены данные, соответствующие посадке на воду полномасштабной модели КМ со следующими харак- теристиками:
масса аппарата, кг моменты инерции, кг·м2
диаметр, м высота, м
3 900;
Jxx = 5 560;
J = 5 270;
Jzyzy = 4 180;
zz 3,85;
2,19.
Измерительная аппаратура в эксперименте
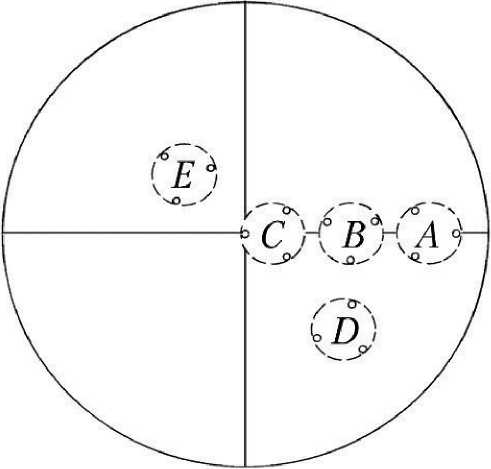
Для определения гидродинамических воздействий на модели размещены 15 датчиков с диафрагмами площадью 1,3 см2, которые условно объединяются в пять кластеров (панелей) A, B, C, D, E (рис. 2, а ). Диапазон измерений большинства датчиков равен 3,5 кгс/см2, а рабочая частота — 6 000 Гц.

а)
б)
Рис. 1. Модель командного модуля Apollo в эксперименте (а) и расчете (б)
Под панелью в эксперименте понимается выделенный участок нижней поверхности модуля в виде окружности площадью 0,2 м2 с центром в точке, равноудаленной от трех расположенных на панели датчиков. Вместо показаний каждого из датчиков в отдельности приводятся давления на каждую из панелей [2]. Под давлением на панель (условную) принимается среднее давление по трем датчикам, объединенным в один кластер.
Также в модель КМ встроены акселерометры для определения значений ускорений аппарата при ударе о воду.
Вариационные параметры эксперимента — угол входа α и скорость входа v эксп. Для некоторых пар начальных параметров {α, v эксп} произведено несколько экспериментальных запусков для определения разброса характеристик.
В каждом экспериментальном запуске измерялись максимальные давления на каждую из панелей, а также максимальные ускорения за время посадки. Также определены среднее давление по всей поверхности КМ и площадь поверхности, погруженной в воду (смачиваемой поверхности), в момент достижения максимального ускорения.
а)
б)
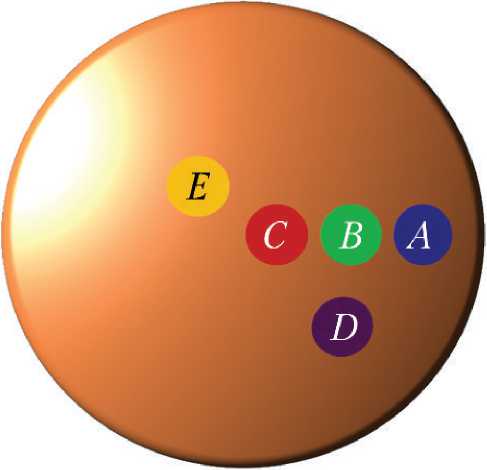
Рис. 2. Расположение датчиков и панелей на нижней части командного модуля Apollo в эксперименте (а) [2] и расчете (б)
Метод моделирования
Для проведения требуемых расчетов используется ПК FlowVision , предназначенный для решения различных задач гидрогазодинамики с использованием метода конечных объемов для дискретизации уравнений сплошной среды и метода Volume on Fluid ( VOF ) для симуляции многофазных течений
[4] и обладающий рядом преимуществ, которые позволяют успешно проводить моделирование посадки на воду возвращаемого аппарата [5].
Расчетная область, граничные условия
Для моделирования среды используется расчетная область размерами 30×20×20 м, заполненная наполовину водой, наполовину воздухом.
Боковые границы расчетной области условно разделяются поверхностью водораздела на две части: водную и воздушную. На них, а также на нижней и верхней границах, ставится граничное условие типа «Вход/Выход» [4] с соответствующей каждой части средой.
Моделирование гидростатики осуществляется на водных границах с использованием условия скорости водной среды вида «Полное давление» с плотностью соответствующей среды и высотой, отсчитываемой от поверхности водораздела.
Для расчета используется полномасштабная модель КМ (см. рис. 1, б ), которая размещается на высоте 0,5 м над поверхностью водораздела (рис. 3) под определенным углом подвеса. Задаются массовые характеристики, соответствующие полноразмерной модели аппарата, а также подбирается начальная скорость его движения таким образом, чтобы скорость входа в воду примерно соответствовала той, что была в эксперименте.
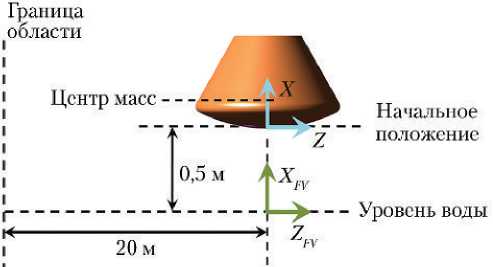
Рис. 3. Системы координат: ■ — локальная; ■ — глобальная Примечание . Размеры приведены не в масштабе.
На поверхности 3 D -модели КМ размещаются пять имитаторов панелей, представляющих собой диски малой толщины, размещенные на нижней поверхности. Площадь имитатора равна площади условных панелей в эксперименте (рис. 2, б ). В процессе расчета определяется среднее давление на каждый из имитаторов.
На модели КМ устанавливается граничное условие «Стенка» [4].
Системы координат
В ПК FlowVision используется два вида систем координат (СК): глобальная СК OFVXFVYFVZFV (принадлежит расчетной области) и локальная СК OXYZ (привязана к нижней точке КМ) (см. рис. 3). Центр масс КМ Apollo смещен относительно оси симметрии в плоскости XZ локальной СК в положительном направлении оси Z и задается координатами ( X = 0,931 м, Y = 0 м, Z = 0,142 м) в локальной СК. Угол входа задается вращением вокруг оси Y локальной СК в направлении по часовой стрелке, если смотреть из ее вершины.
Расчетная сетка
Для расчетов используется неравномерная сетка с локальными адаптациями (сгущениями) в области приводнения аппарата, а также по его поверхности (рис. 4). Размерность сетки меняется на каждом шаге вследствие перестройки адаптаций по поверхности подвижного тела и составляет в среднем пять миллионов ячеек.
Характерный размер ячейки неподвижной сетки в районе посадки аппарата равен 6,25 см, а в области адаптации по поверхности вблизи КМ — 3,125 см.
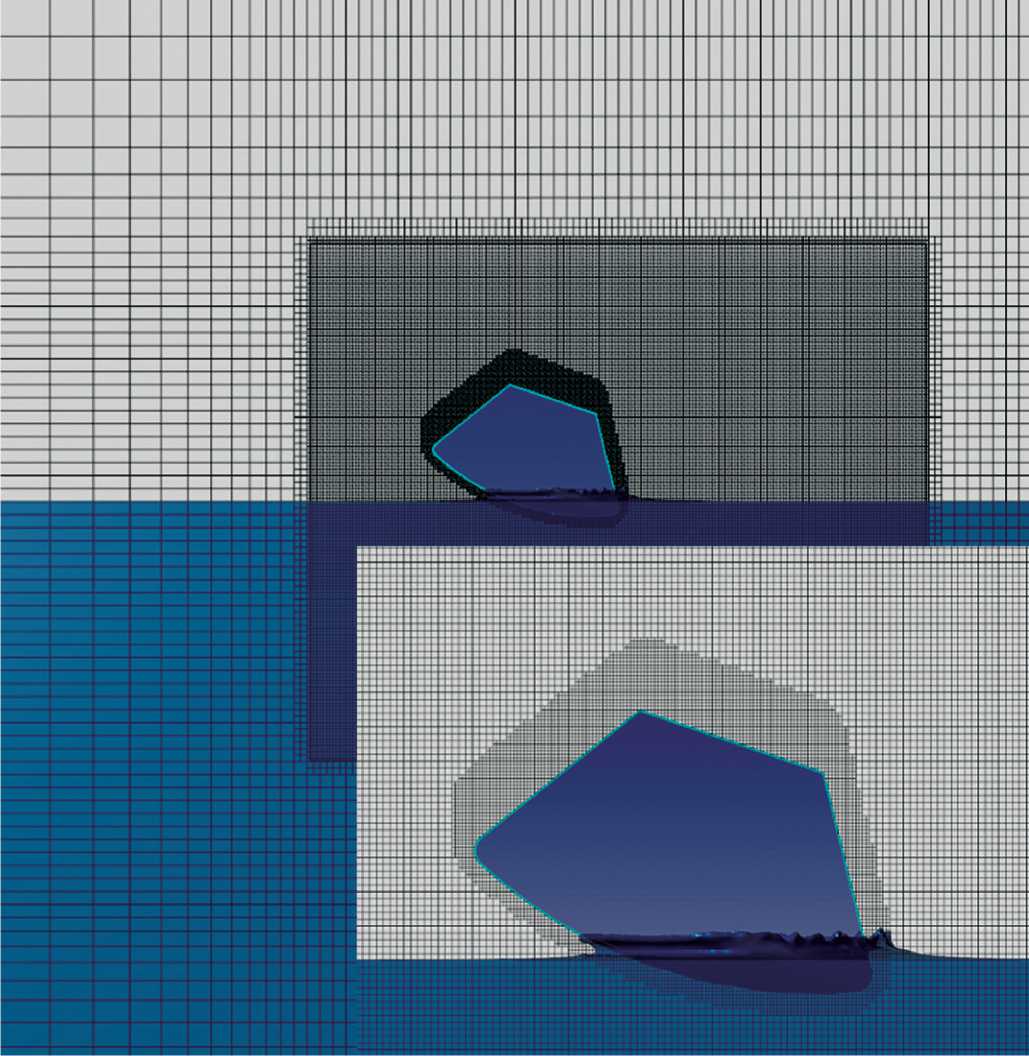
Рис. 4. Расчетная сетка и увеличенный ее участок в области приводнения командного модуля Apollo
Параметры солвера
Расчет движения жидкости в FlowVision может вестись в двух приближениях: консервативном и неконсервативном .
В консервативном режиме для среды гарантируется выполнение закона сохранения массы. Для корректного учета движения жидкости требуется построение равномерной расчетной сетки, что значительно увеличивает ее размерность.
В неконсервативном режиме закон сохранения массы не выполняется, и расчет может проводиться на неравномерной расчетной сетке. Как побочный эффект, капли жидкости, переходящие из области с большей адаптацией в меньшую, пропадают (рис. 5).
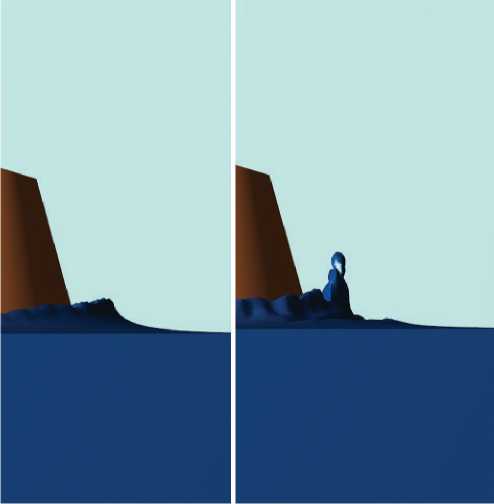
Рис. 5. Поведение свободной поверхности в неконсервативном (слева) и консервативном (справа) приближении
Примечание. В консервативном режиме при переходе капель водной среды в область с более крупной сеткой объем большей ячейки заполняется жидкостью целиком.
Ввиду ограниченности расчетных ресурсов и следующей из этого необходимости проводить расчеты с использованием неравномерной расчетной сетки (меньшей размерности) среда в расчетах принимается неконсервативной.
В используемом ПК FlowVision методе моделирования течения двухфазных сред VOF возможно моделирование дроплетов (капли жидкости и пузыри воздуха) [4]. Однако при проведении расчетов по посадке КМ Apollo моделирование дроплетов отключается для ускорения процесса расчета.
Для учета турбулентности использована стандартная к-s модель.
Шаг по времени, расчетные ресурсы
Для расчетов используется схема под названием «неявная новая» [4] второго порядка точности с конвективным числом Куранта–Фридрихса–Леви КФЛконв = 2 и поверхностным КФЛпов = 1. Максимальный шаг по времени составляет 0,025 с.
Основная часть расчетов проведена на солвере, работающем в режиме «восемь процессоров по четыре ядра» (32 ядра). Среднее время расчета одной итерации на временнóм промежутке 0…0,5 с (расчетного времени) составляет 100 с на сетке размерностью ~4,9 млн ячеек. При дальнейшем расчете время, затрачиваемое на одну итерацию, увеличивается и достигает значений вплоть до 1 000 с на момент времени 1,5 с (расчетного времени).
Расчетные режимы посадки на воду корабля Apollo
Расчет посадки на воду корабля Apollo проведен для ряда режимов, которые повторяют условия некоторых из экспериментальных запусков (таблица). Каждому из расчетных случаев соответствуют три экспериментальных запуска с одними и теми же начальными данными {a, v эксп }.
Начальные параметры экспериментальных запусков, выбранных для расчетов
|
Номер расчета |
Угол входа а, ° |
Скорость входа v , м/с |
|
|
Эксперимент ( v эксп) |
Расчет ( v расч) |
||
|
1 |
26 |
9,45 |
9,49 |
|
2 |
20 |
9,63 |
9,62 |
|
3 |
23 |
11,00 |
10,58 |
Поскольку за время падения с малой высоты угол между осью модуля и нормалью к поверхности меняется незначительно, предполагается, что угол входа аппарата в воду приблизительно равен углу подвеса.
Расчетная скорость входа в воду отличается от экспериментальной, поскольку в начальных данных расчета задается скорость модуля на расстоянии 0,5 м от поверхности водораздела, а скорость входа определяется уже после расчета. В данных исследованиях расхождение экспериментальных и расчетных скоростей входа считается допустимым.
Результаты
В результате расчета получена динамика изменения среднего давления (рис. 6) по площади имитаторов, соответствующих каждой из панелей A...E (см. рис. 2, б ), а также динамика изменения перегрузок КМ (рис. 7).
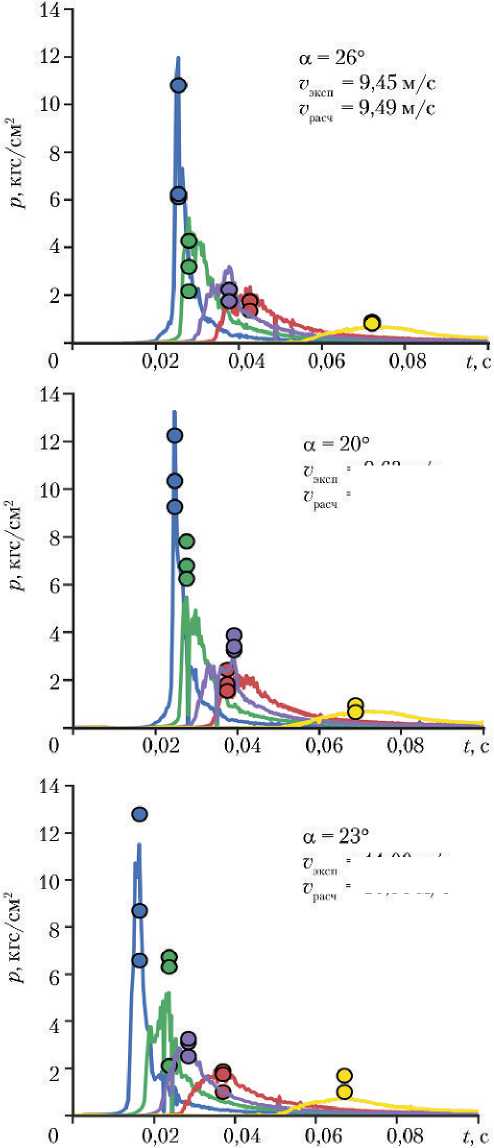
Рис. 6. Давление на панели модели командного модуля корабля Apollo в расчете (сплошные линии) и эксперименте (точки): — — панель A; — — панель B; — — панель C; — — панель D; — — панельE
= 9,63 м/с
= 9,62 м/с
= 11,00 м/с
= 10,58 м/с
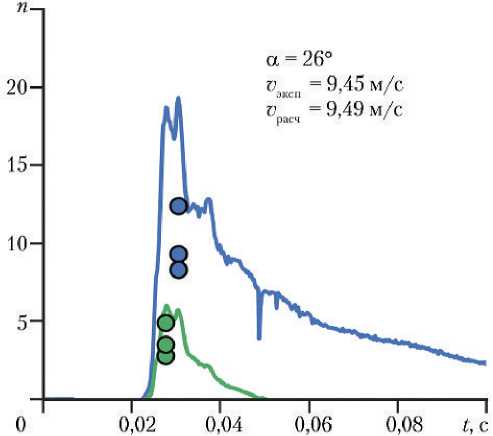
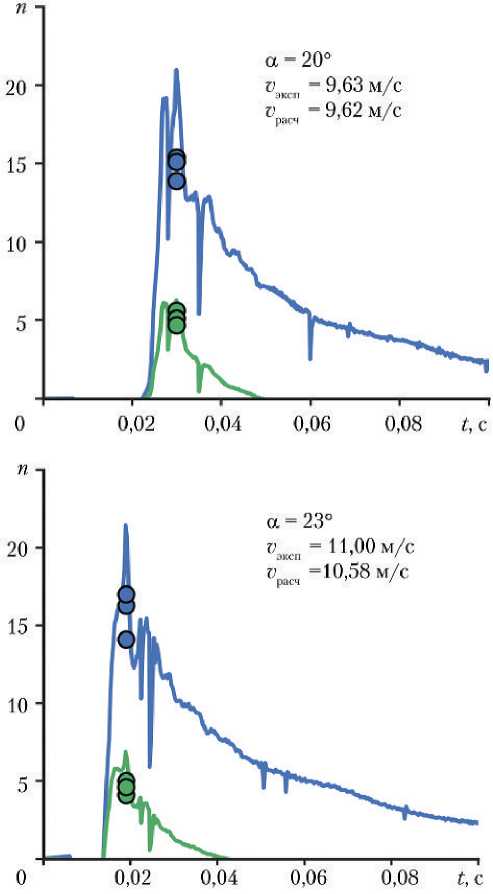
Рис. 7. Ускорение командного модуля корабля Apollo в расчете (сплошные линии) и эксперименте (точки): — — нормальное; — — продольное
Примечание. α — угол входа; v эксп — скорость в эксперименте; v расч — скорость в расчете.
Примечание. α — угол входа; v эксп — скорость в эксперименте; v расч — скорость в расчете.
Подтверждением того, что в расчетах верно моделируется динамика изменения давления и перегрузок, по крайней мере на коротких промежутках времени, может служить сравнение таких характеристик, как среднее по поверхности КМ давление и площадь смачиваемой поверхности аппарата в момент достижения им максимального ускорения в расчете и эксперименте (рис. 8).
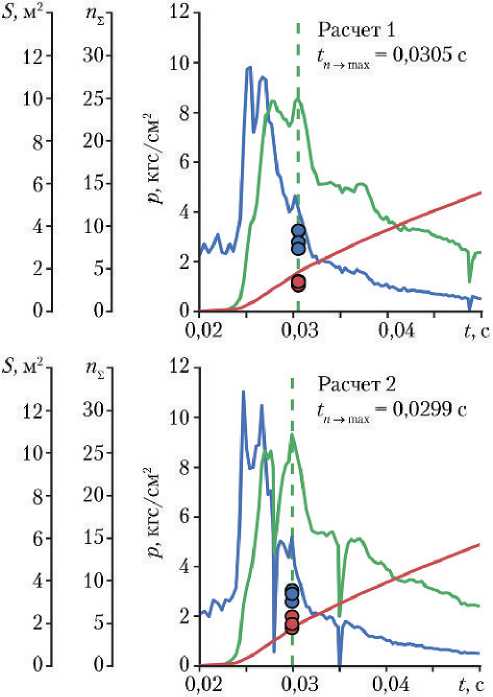
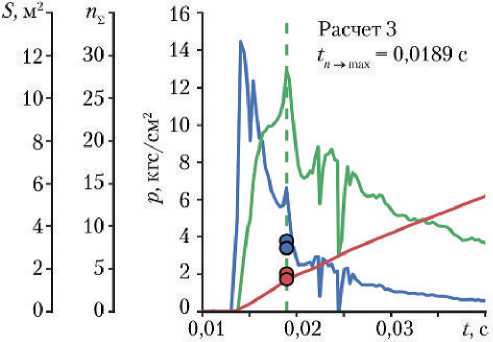
Рис. 8. Среднее по поверхности командного модуля давление и площадь смачиваемой поверхности в расчете (линии) и эксперименте (точки) в момент достижения максимального ускорения: — — среднее по поверхности давление р; — — полная перегрузка n z ; — — площадь смачиваемой поверхности S
Список литературы Сравнительный анализ расчетных и экспериментальных исследований гидродинамических воздействий на модель возвращаемого аппарата с неработающей двигательной установкой при посадке на воду
- Антонова Н.П., Брюханов Н.А., Четкин С.В. Средства посадки пилотируемого транспортного корабля нового поколения//Космическая техника и технологии. 2014. № 4(7). С. 21-30.
- Sandy M. Stubbs. Dynamic model investigation of water pressures and accelerations encountered during landings of the Apollo spacecraft//NASA TND-3980, 1967. 43p.
- Burkhalter D., Patel M. Crew module water landing simulation methods development for NASA//Altair Engineering Inc., 2011. 21 р.
- FlowVision. Руководство пользователя. Версия 3.09.05. М.: ООО «ТЕСИС», 2015. 1272 с.
- Аксенов А.А., Дядькин А.А., Павлов А.О., Симакова Т.В., Скороваров А.Ю., Щеляев А.Е. Расчетные исследования гидродинамических воздействий на возвращаемый аппарат при посадке на водную поверхность//Космическая техника и технологии. 2016. № 3(14). C. 5-14.
