Сравнительный анализ способов регулирования частотных характеристик имитаторов электрических характеристик систем электропитания космических аппаратов

Автор: Мизрах Е.А., Лобанов Д.К., Харлашина С.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 3 т.25, 2024 года.
Бесплатный доступ
Одной из основных систем космического аппарата (КА) является система электропитания (СЭП). Основу СЭП составляют вторичные источники питания (ВИП), использующие различные способы управления и преобразования электроэнергии, что приводит к существенным отличиям их динамических свойств. Со стороны бортовых потребителей динамика СЭП определяется полным внутренним сопротивлением (импедансом) ВИП. При проведении наземных электрических испытаний электротехнических систем (ЭТС) КА, вследствие сложности применения систем электропитания, применяют испытательные комплексы, основу которых составляют имитаторы электрических характеристик СЭП (ИСЭП). Современные ИСЭП используют модульный принцип конфигурирования, что позволяет производить ИСЭП разной мощности, но энергетические модули имеют фиксированные или регулируемые в узком диапазоне частот импедансные частотные характеристики, что приводит к ограничению типов имитируемых СЭП. Снабжение ИСЭП свойством регулирования частотных характеристик в широком диапазоне частот расширяет функциональные возможности ИСЭП, так как позволяет имитировать динамические свойства СЭП, содержащих ВИП разных типов. Целью работы является исследование и сравнительный анализ трёх способов регулирования импедансных частотных характеристик (ИЧХ) модуля ИСЭП. Способы регулирования ИЧХ ИСЭП рассматриваются на основе его обобщённой функциональной схемы, содержащей математические модели усилителя-сумматора (УС), последовательного корректирующего устройства (КУ), усилителя мощности (УМ), делителя напряжения (ДН) и нагрузки (Н). В статье проведен анализ вариантов регулирования импедансных частотных характеристик ИСЭП, рассмотрены три способа регулирования ИЧХ: два с пассивным корректирующим устройством и один с активным КУ. В работе приведена имитационная модель в пакете MicroCap электрической схемы модуля ИСЭП, проведены вычислительные эксперименты по каждому способу регулирования ИЧХ ИСЭП. По результатам исследования рекомендован способ коррекции и регулирования ИЧХ ИСЭП, позволяющий раздельно регулировать низкочастотную и среднечастотную области ИЧХ, что позволяет существенно упростить настройку и обеспечение ИЧХ ИСЭП в соответствии с заданными требованиями.
Система электропитания, имитатор, импеданс, частотная характеристика, регулирование, моделирование
Короткий адрес: https://sciup.org/148330563
IDR: 148330563 | УДК: 681.333.(088.8) | DOI: 10.31772/2712-8970-2024-25-3-337-350
Comparative analysis of methods for regulating the frequency characteristics of simulators of electrical characteristics of spacecraft power supply systems
One of the main systems of a spacecraft (SC) is the power supply system (PSS). The basis of PDS are secondary power sources (SPS), which use various methods of controlling and converting electricity, which leads to significant differences in their dynamic properties. From the side of on-board consumers, the dynamics of the power transmission system is determined by the total internal resistance (impedance) of the VIP. When conducting ground electrical tests of spacecraft ETS, due to the complexity of using power supply systems, test complexes are used, the basis of which is simulators of electrical characteristics of electric power transmission systems (EPTS). Modern ISPS use a modular configuration principle, which makes it possible to produce EPTS of different powers, but energy modules have fixed or adjustable impedance frequency characteristics over a narrow frequency range, which leads to a limitation of the types of simulated PSPS. Equipping the EPTS with the property of regulating frequency characteristics in a wide frequency range expands the functionality of the EPTS, as it allows you to simulate the dynamic properties of the PSEP containing different types of VIPs. The purpose of the work is to study and comparative analysis of three methods for regulating the impedance frequency characteristics (IFC) of the EPTS module. Methods for regulating the frequency response of an EPTS are considered on the basis of its generalized functional diagram containing mathematical models: amplifier-adder (AS), serial correction device (CU), power amplifier (PA), voltage divider (DN) and load (L). The article analyzes options for regulating the impedance frequency characteristics of EPTS, and considers three methods for regulating the IFC: two with a passive correction device and one with an active CU. The paper presents a simulation model in the MicroCap package of the electrical circuit of the EPTS module, and computational experiments have been carried out on each method of regulating the IFC of the EPTS. Based on the results of the study, a method for correcting and regulating the IFC of the EPTS is recommended, which makes it possible to separately regulate the low-frequency and mid-frequency regions of the IFC, which makes it possible to significantly simplify the configuration and provision of the IFC of the EPTS in accordance with the specified requirements.
Текст научной статьи Сравнительный анализ способов регулирования частотных характеристик имитаторов электрических характеристик систем электропитания космических аппаратов
Одной из основных систем космического аппарата (КА) является система электропитания (СЭП) [1–3]. Основу СЭП составляют вторичные источники питания (ВИП), использующие различные способы управления и преобразования электроэнергии [4–7], что приводит к существенным отличиям их динамических свойств. Со стороны бортовых потребителей динамика СЭП определяется полным внутренним сопротивлением (импедансом) ВИП.
В ходе наземных испытаний потребители, подключаемые к СЭП КА, должны проверяться на работоспособность и устойчивость к воздействию по шинам питания электромагнитных помех допустимой амплитуды (ГОСТ Р51317.4.11–2007).
Бортовая СЭП в этом случае не соответствует условиям испытаний по следующим причинам:
-
– для имитации ухудшения качества напряжения питания вследствие аварийных режимов и постепенной деградации электротехнического оборудования бортовой СЭП требуется варьировать напряжение в широком диапазоне на входах потребителей (нагрузок);
-
– СЭП КА не может воспроизводить помехи на шинах питания с заданными параметрами, что не позволяет имитировать помеховую обстановку и проверять на работоспособность и устойчивость к воздействию по шинам питания электромагнитных помех допустимой амплитуды электротехнических систем (ЭТС) КА, например, ретрансляторов;
-
– бортовую СЭП КА нежелательно использовать при входном контроле электрооборудования потребителей энергии из-за возможности возникновения нештатных ситуаций или отказов испытываемого оборудования, что может привести к выходу из строя маломощных потребителей.
При проведении наземных электрических испытаний ЭТС КА, вследствие сложности применения систем электропитания, применяют автоматизированные испытательные комплексы [8–11], в состав которых входят имитаторы электрических характеристик основных подсистем СЭП, в том числе имитаторы ВИП СЭП (ИСЭП).
Современные ИСЭП [12; 13] используют модульный принцип конфигурирования, что позволяет производить ИСЭП разной мощности, но энергетические модули имеют фиксированные или регулируемые в узком диапазоне частот импедансные частотные характеристики, что приводит к ограничению типов имитируемых СЭП. Снабжение ИСЭП свойством регулирования частотных характеристик в широком диапазоне частот расширяет их функциональные возможности, так как позволяет имитировать динамические свойства различных типов СЭП.
Целью работы является исследование и сравнительный анализ разработанных авторами трёх способов регулирования импедансных частотных характеристик (ИЧХ) модуля ИСЭП.
Методы решения задачи
Способы регулирования ИЧХ ИСЭП рассматриваются на основе его обобщённой функциональной схемы (рис. 1), содержащей математические модели усилителя-сумматора (УС), последовательного корректирующего устройства (КУ), усилителя мощности (УМ), делителя напряжения (ДН) и нагрузки (Н).
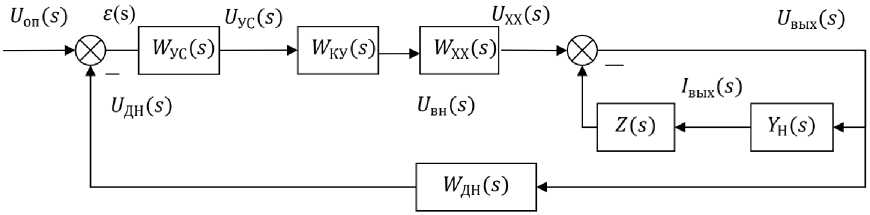
Рис. 1. Функциональная схема модуля ИСЭП:
W УС( s ) – передаточная функция (ПФ) усилителя-сумматора; W КУ( s ) – ПФ корректирующего устройства (КУ), обеспечивающего устойчивость и требуемое качество переходных процессов системы управления ИСЭП;
W ДН ( s ) – ПФ цепи обратной связи; W ХХ ( s ) – ПФ УМ в режиме холостого хода; Z ( s ) – внутренний импеданс УМ;
Y Н ( s ) – адмитанс нагрузки
-
Fig. 1. Functional diagram of the EPTS module:
W US( s ) – transfer function (TF) of the adder amplifier; W CU( s ) – PF of the correction device (CU), ensuring stability and the required quality of transient processes of the EPTS control system; W DN ( s ) – PF feedback circuit;
W ХХ ( s ) – PF PA in idle mode; Z ( s ) – internal impedance of the PA; Y Н ( s ) – load admittance
Импеданс ИСЭП описывается выражением:
Z ИСЭП ( s )
и (s)
вых
I ( s )
вых
Z (s)
1 + W p ( s ) ,
где ПФ W Р ( s ) – ПФ разомкнутого контура ИСЭП, согласно рис. 1, при исключённом Y Н ( s ) имеет вид
Переходя к импедансным частотным характеристикам (ИЧХ), получим для ИЧХ ИСЭП:
Z ИСЭП ( ю )
Z (j ю)
1 + W p ( j ю )
Z ( ® ) 17
( ) 1 + Wp (j®)
В области низких частот (НЧ) при ω → 0, для обеспечения требуемой точности стабилизации выходного напряжения U ВЫХ, статический коэффициент передачи контура много больше единицы, т. е. выполняется условие ǀ W P( j 0)ǀ » 1, поэтому можно записать:
Z ИСЭП ( ю )~ Z ( ю )’
WP (j0)
Поскольку регулировка внутреннего импеданса Z (ω) УМ затруднена, а зачастую невозможна, то из (4) следует, что регулирование активной части ИЧХ ИСЭП Z ИСЭП(ω) в области НЧ возможно только за счёт статического коэффициента передачи W P( j 0).
В области высоких частот (ВЧ) при ω → ∞, для обеспечения требуемых фильтрующих свойств ИСЭП, выполняется условие: ǀ W P(ω)ǀ « 1, поэтому можно записать:
Z ИСЭП ( ю ) Z ( ю )’
1 + Wp (>)
поскольку ИЧХ ИСЭП (5) в области ВЧ совпадает с ИЧХ УМ, то регулированию не поддаётся.
В области средних частот (СЧ), где модуль ПФ W P (ω) разомкнутого контура соизмерим с единицей, регулирование ИЧХ Z ИСЭП (ω) возможно, главным образом, за счёт изменения параметров ПФ КУ W КУ ( s ), входящей, согласно (2), в выражение W P (ω).
Рассмотрим три способа регулирования ИЧХ ИСЭП в области низких и средних частот.
На рис. 2 показана имитационная модель в пакете MicroCap электрической схемы модуля ИСЭП с пассивным корректирующим устройством, содержащим резисторы R КУ1 , R КУ2 и конденсатор С 1 . На рис. 3 показаны частотные характеристики разомкнутого контура скорректированной системы, соответствующие (2).
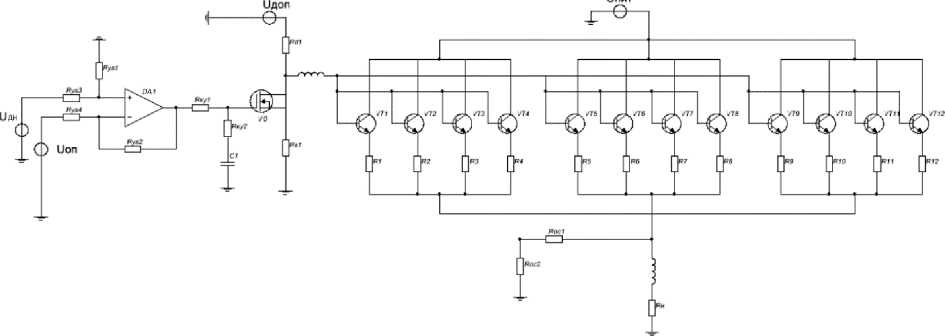
Рис. 2. Имитационная модель разомкнутого контура скорректированной системы управления модуля ИСЭП
-
Fig. 2. Open-loop simulation model of the adjusted control system of the EPTS module
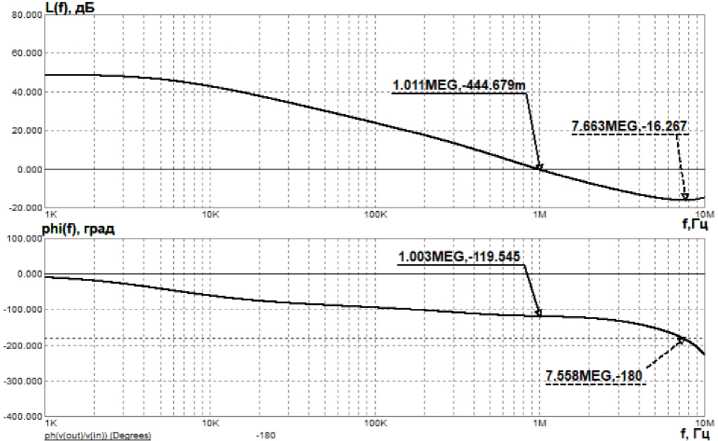
Рис. 3. ЛЧХ разомкнутой скорректированной системы управления модуля ИСЭП
-
Fig. 3. LFC of the open-loop adjusted control system of the EPTS module
Система устойчива, отвечает требованиям к запасам устойчивости и полосе пропускания.
Первый способ регулирования ИЧХ ИСЭП состоит в изменении коэффициента передачи
УC посредством резистора R УС 2 и изменении параметров КУ посредством резистора R КУ 1 [14].
ПФ УС имеет вид
Us
УС ( ) U ДН ( s )
^^^^^^в
________ Woy ( s ) ________
НУС^ ^ ОУ ( s ) + ' R УС4 + R УС2
где WОУ(s) – ПФ разомкнутого операционного усилителя.
ПФ КУ, согласно электрической схеме (рис. 2),
WKy(s)
R КУ2 ■ C 1 ■ s + 1
( R КУ1 + R КУ2 ) ■ C 1 ’ s + 1
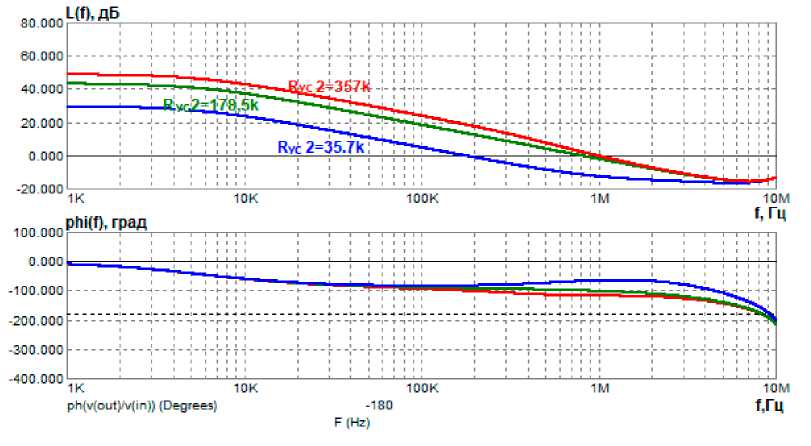
Рис. 4. ЛЧХ скоректированной системы управления модуля ИСЭП при изменении сопротивления R УС 2
-
Fig. 4. LFC of the adjusted control system of the EPTS module when changing resistance R YS2
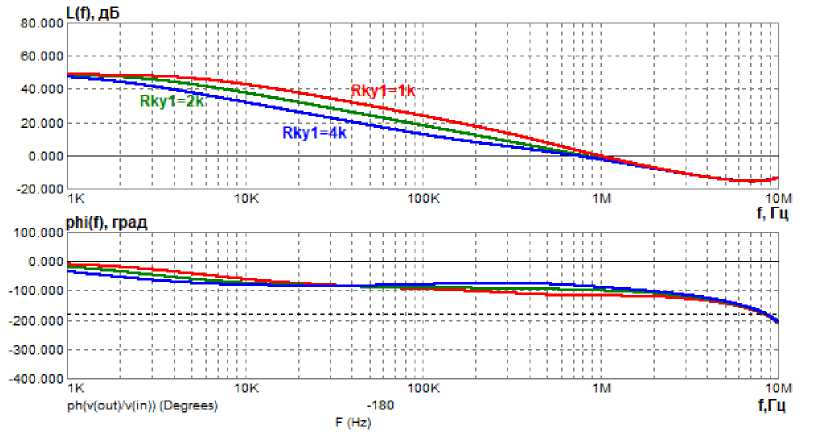
Рис. 5. ЛЧХ скоректированной системы управления модуля ИСЭП при изменении сопротивления R КУ1 (способ 1)
Fig. 5. LFC of the adjusted control system of the ISEP module when changing resistance R KY1 (method 1)
Анализ ЛЧХ (рис. 4 и 5) разомкнутой системы управления модуля ИСЭП с варьируемыми сопротивлениями резисторов показывает, что система остается устойчивой при изменении номиналов сопротивлений, частота среза и запас по фазе существенно не изменяются.
ИЧХ ИСЭП, измеренные на имитационной модели (рис. 2) согласно (3), при вариации сопротивлений тех же резисторов в аналогичных диапазонах, что и в предыдущем случае, показаны на рис. 6 и 7.
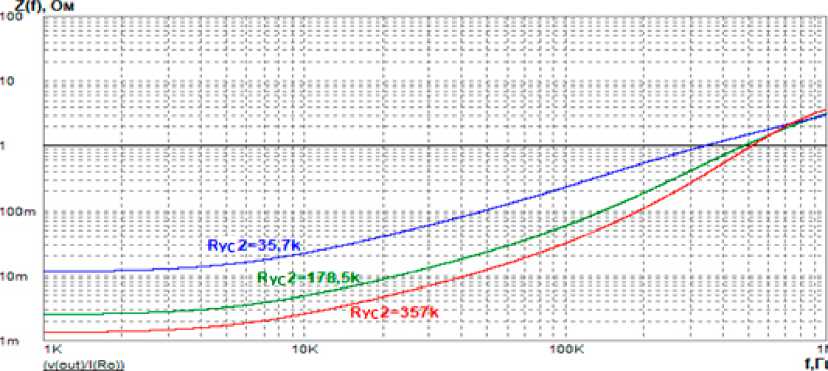
Рис. 6. ИЧХ замкнутой системы управления модуля ИСЭП при изменении сопротивления R УС 2 (способ 1)
Fig. 6. IFC of the closed-loop control system of the ISEP module when changing resistance R YS 2 (method 1)
Увеличение сопротивления обратной связи R УС 2 (см. рис. 6) ведёт к увеличению коэффициента усиления УС и увеличению его постоянной времени. В результате всё это приводит к уменьшению активной составляющей ИЧХ ИСЭП в области НЧ и деформации индуктивной составляющей ИЧХ в области СЧ.
Из рис. 7 видно, что при изменении сопротивления R КУ 1 активная составляющая ИЧХ ИСЭП остаётся постоянной, а регулируется только среднечастотная (СЧ) область ИЧХ.
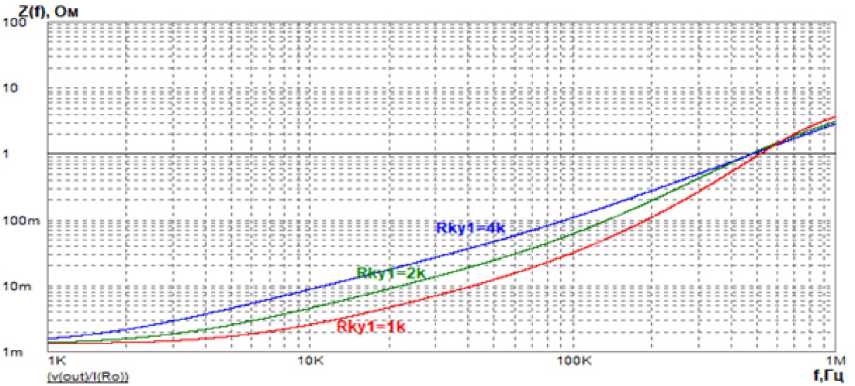
Рис. 7. ИЧХ замкнутой системы управления модуля ИСЭП при изменении сопротивления R КУ1 (способ 1)
Fig. 7. IFC of the closed-loop control system of the ISEP module when changing resistance R KY1 (method 1)
Таким образом, можно рекомендовать следующую процедуру обеспечения требуемых параметров ИЧХ ИСЭП: а) выбором величины сопротивления обратной связи R УС 2 обеспечивается требуемая величина активной составляющей ИЧХ ИСЭП; б) подбором величины сопротивления R КУ 1 обеспечивается требуемый вид ИЧХ в среднечастотной (СЧ) области.
Недостаток данного способа состоит в том, что при изменении сопротивления обратной связи R УС 2 деформируется СЧ область ИЧХ, что усложняет подбор величины сопротивления R КУ 1 КУ.
Второй способ регулирования ИЧХ ИСЭП [15] также состоит в изменении коэффициента передачи УC посредством резистора R УС 2 и изменении параметров КУ посредством резистора R КУ 1, но отличается электрической схемой соединения КУ и УС. В этом случае обратная отрицательная связь в УС заводится не с выхода УС, а с выхода КУ (рис. 8), т. е. КУ входит в контур регулирования ОУ, образуя КУ второго типа. Имитационная модель разомкнутого контура скорректированной системы управления модуля ИСЭП отличается от рис. 2 тем, что ОУ и КУ заменены схемой КУ второго типа (рис. 8).
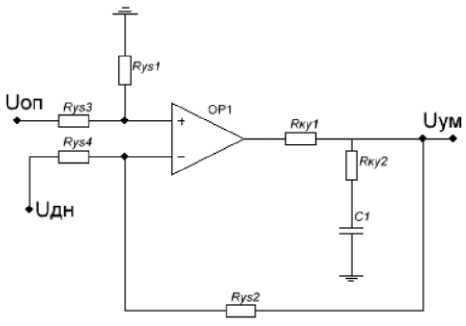
Рис. 8. Электрическая схема КУ второго типа
Fig. 8. Electrical diagram of the second type KU
Передаточная функция схемы КУ второго типа:
WKy ( s)
U УМ ( s ) U ДН ( s )
^^^^B
W oy ( s ) -
R КУ2 - C - s + 1
( R КУ1 + R КУ2 ) ' C 1 ' s + 1
---R^--W oy ( s ) - 7 R КУ2 - C 1' s + 1---- R УС4 + R УС2 ( R КУ1 + R КУ2 ) - C 1 ’ s + 1
где W ОУ( s ) – ПФ разомкнутого операционного усилителя.
Для совпадения ЛЧХ скорректированной системы с ЛЧХ в предыдущем случае, была пересчитана величина емкости конденсатора С 1 . Величины сопротивлений резисторов остались без изменений.
Результаты измерения ЛЧХ разомкнутой системы при изменении сопротивления R УС 2 обратной связи и сопротивления R КУ1 приведены на рис. 9 и 10, соответственно.
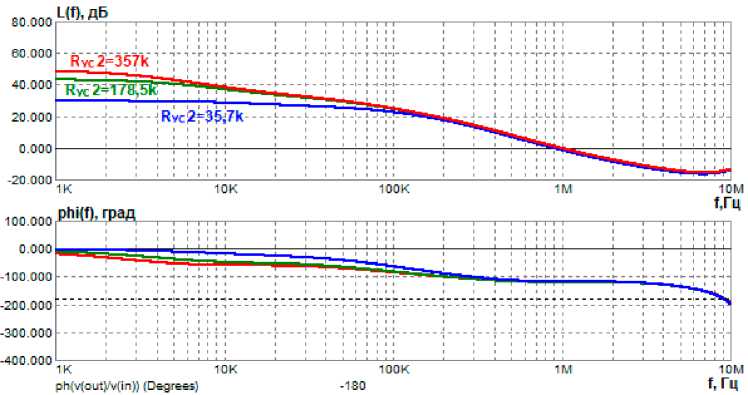
Рис. 9. ЛЧХ скоректированной системы управления модуля ИСЭП при изменении сопротивления R УС2 (способ 2)
Fig. 9. LFC of the adjusted control system of the ISEP module when changing resistance R YS 2 (method 2)
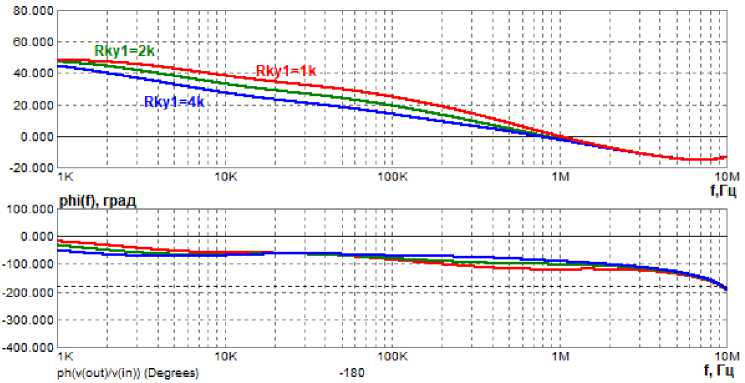
Рис. 10. ЛЧХ скоректированной системы управления модуля ИСЭП при изменении сопротивления R КУ 1 (способ 2)
Fig. 10. LFC of the adjusted control system of the EPTS module when changing resistance R KY1 (method 2)
Из рис. 9 и 10 видно, что система управления остается устойчивой при изменении величин сопротивлений, а частота среза и запас по фазе меняются незначительно.
ИЧХ ИСЭП, измеренные на имитационной модели с коррекцией, выполненной по второму способу, при вариации сопротивлений тех же резисторов в аналогичных диапазонах, что и в предыдущем случае, показаны на рис. 11 и 12.
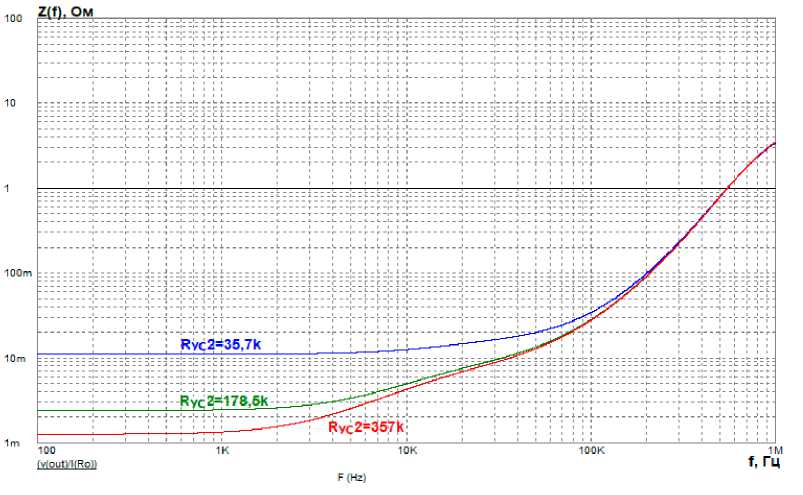
Рис. 11. ИЧХ замкнутой системы управления модуля ИСЭП при изменении сопротивления R УС 2 (способ 2)
Fig. 11. IFC of the closed-loop control system of the ISEP module when changing the resistance R YS 2 (method 2)
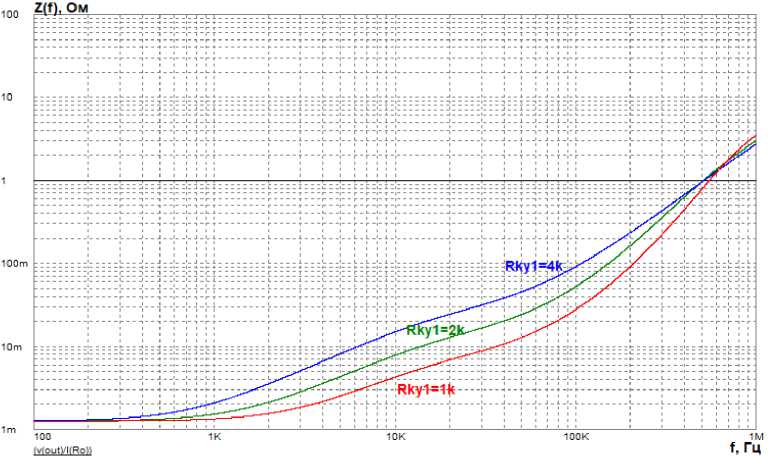
Рис. 12. ИЧХ замкнутой системы управления модуля ИСЭП при изменении сопротивления R КУ1 (способ 2)
Fig. 12. IFC of the closed-loop control system of the EPTS module when changing resistance R КУ 1 (method 2)
Из рис. 11 видно, что при увеличении сопротивления RУС2 уменьшается активная составляющая ИЧХ ИСЭП, а индуктивная составляющая остаётся практически без изменения. Из рис. 12 видно, что варьирование сопротивления RКУ1, изменяет среднечастотную область ИЧХ и сохраняет постоянной активную составляющую ИЧХ.
Вывод: в данном способе возможно независимое регулирование НЧ и СЧ областей ИЧХ ИСЭП за счёт варьирования величины сопротивления R УС 2 и сопротивления R КУ 1, соответственно.
Третий способ регулирования ИЧХ ИСЭП основан на изменении сопротивлений R КУ 1 и R УС 2 КУ третьего типа – активного, выполненного на суммирующем операционном усилителе (рис. 13).
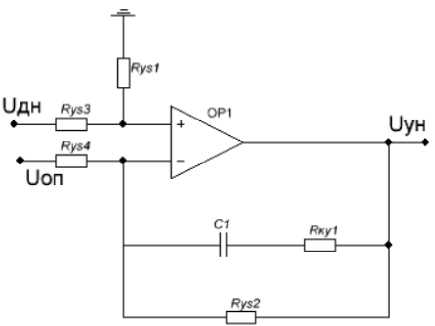
Рис. 13. Электрическая схема КУ третьего типа
Fig. 13. Electrical diagram of the third type KU
Передаточная функция схемы:
W Ky ( s ) = UyH
U ОП
R УС2 R КУ1 ’ C 1 ’ s + 1
------------• —-----------------------------:-----------------------.
R УС4 ( R КУ1 + R УС2 ) ’ C 1 ’ s + 1
Параметры КУ рассчитаны таким образом, чтобы ЛАХ КУ первого и третьего типа совпадали, а величины сопротивлений R УС1 и R УС2 остались неизменными.
ИЧХ ИСЭП, измеренные на имитационной модели с коррекцией, выполненной по третьему способу, при вариации сопротивлений тех же резисторов в аналогичных диапазонах, что и в предыдущих случаях, показаны на рис. 14 и 15.
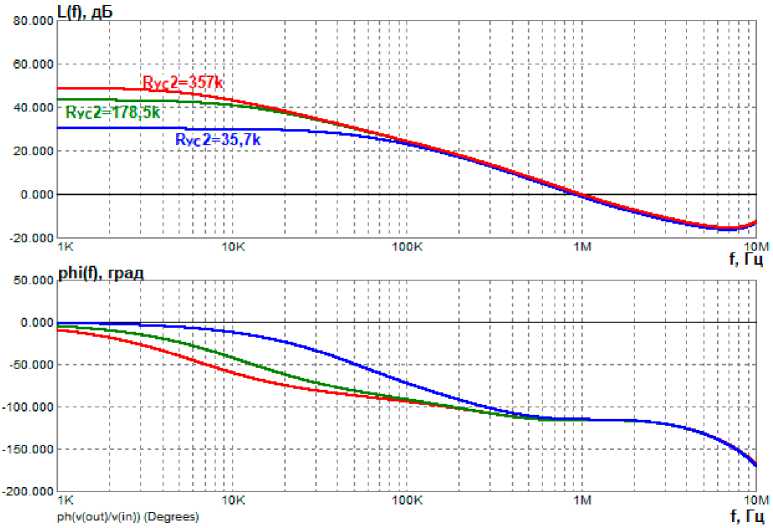
Рис. 14. ЛЧХ скоректированной системы управления модуля ИСЭП при изменении сопротивления R УС2 (способ 3)
Fig. 14. LFC of the adjusted control system of the EPTS module when changing resistance RYS 2 (method 3)
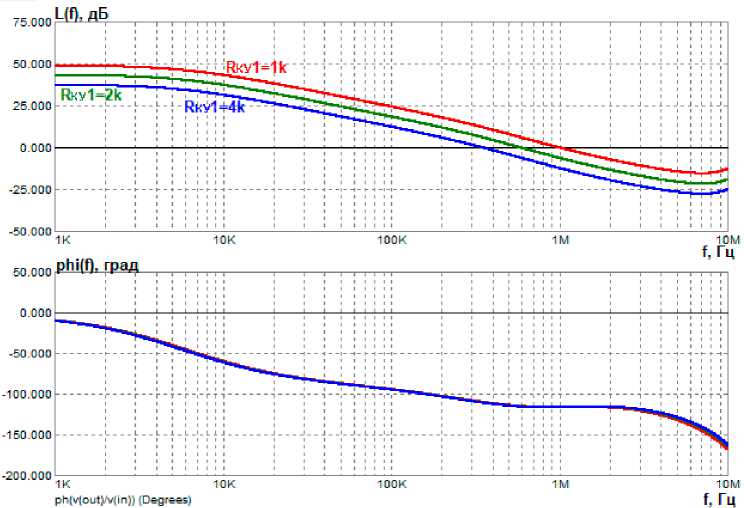
Рис. 15. ЛЧХ скоректированной системы управления модуля ИСЭП при изменении сопротивления (способ 3)
Fig. 15. LFC of the adjusted control system of the EPTS module when the resistance changes (method 3)
Из рис. 14 и 15 видно, что система управления остается устойчивой при изменении величин сопротивлений, а частота среза и запас по фазе меняются незначительно.
ИЧХ ИСЭП, измеренные на имитационной модели согласно (3), при вариации сопротивлений резисторов R УС2 и R КУ1 в аналогичных диапазонах, что и в предыдущих случаях, показаны на рис. 16 и 17.
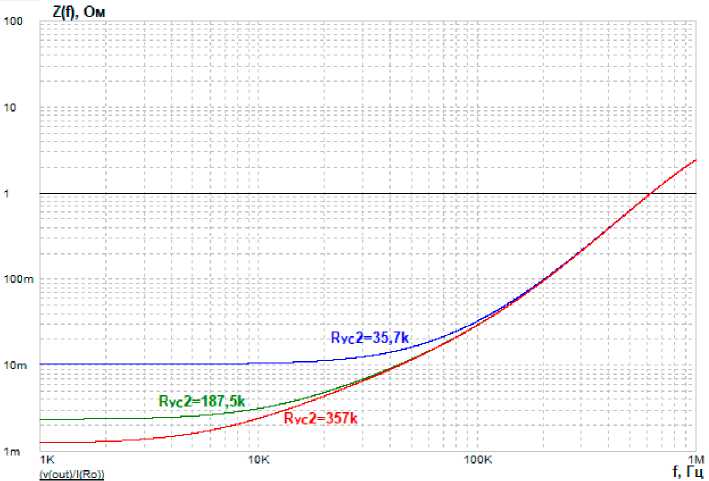
Рис. 16. ИЧХ замкнутой системы управления модуля ИСЭП при изменении сопротивления R УС 2 (способ 3)
Fig. 16. IFC of the closed-loop control system of the EPTS module when changing the resistance R YS2 (method 3)
Из рис. 16 видно, что варьирование сопротивления обратной связи R УС2 ОУ изменяет активную составляющую ИЧХ ИСЭП без изменения индуктивной составляющей ИЧХ.
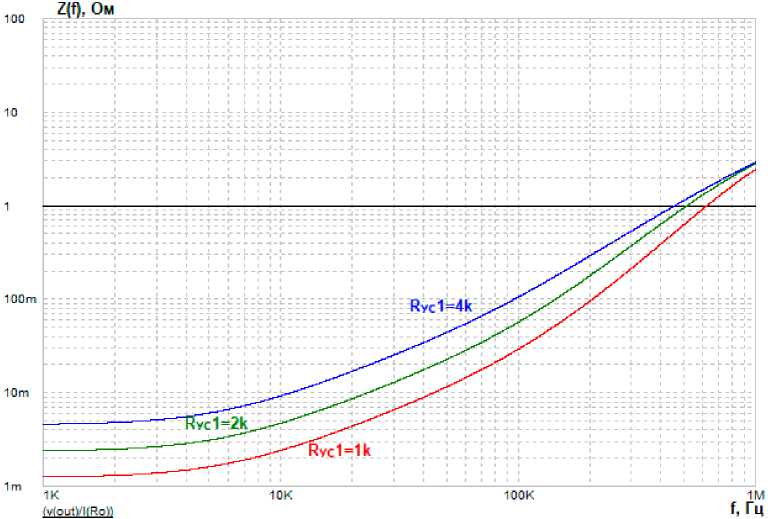
Рис. 17. ИЧХ замкнутой системы управления модуля ИСЭП при изменении сопротивления R УС1 (способ 3)
Fig. 17. IFC of the closed-loop control system of the EPTS module when changing resistance R YS 1 (method 3)
При варьировании сопротивления R УС 1 КУ одновременно изменяются активная и индуктивная составляющие ИЧХ, что усложняет регулирование ИЧХ ИСЭП.
Заключение
Сравнительный анализ результатов имитационного моделирования трёх способов коррекции и регулирования ИЧХ ИСЭП показал:
-
1. Все три способа позволяют регулировать ИЧХ ИСЭП в низкочастотной и среднечастотной области ИЧХ без ухудшения устойчивости системы управления ИСЭП.
-
2. Для практического применения следует рекомендовать второй способ коррекции и регулирования ИЧХ ИСЭП, позволяющего раздельно регулировать низкочастотную и среднечастотную области ИЧХ, что позволяет существенно упростить настройку ИЧХ ИСЭП в соответствии с заданными требованиями.
Список литературы Сравнительный анализ способов регулирования частотных характеристик имитаторов электрических характеристик систем электропитания космических аппаратов
- Системы электропитания космических аппаратов / Б. П. Соустин, В. И. Иванчура, А. И. Чернышев, Ш. Н. Исляев. Новосибирск: Наука ; Сибирская издательская фирма, 1994. 318 с.
- Spacecraft Power System Technologies / Q. Chen, Z. Liu, X. Zhang, L. Zhu. Springer. 2020. 321 р.
- Груздев А. И., Пушко С. В., Шевцов М. С. Инновационные подходы к проектированию систем электроснабжения низкоорбитальных космических аппаратов со сроком активного существования 7 и более лет // Вопр. электромех. 2022. № 2. С. 24–33.
- Краснобаев Ю. В. Методология синтеза законов и структур устройств управления конверторами // Изв. вузов. Приборостроение. 2004. Т. 47, № 4. С. 39–48.
- Краснобаев Ю. В. Перспективы развития зарядно-разрядных устройств систем электропитания космических аппаратов // Сибирский аэрокосмический журнал. 2024. Т. 25, № 1. С. 115–125. Doi: 10.31772/2712-8970-2024-25-1-115-125.
- Fernandez-Serantes, Luis-Alfonso; Casteleiro-Roca, José-Luis. Data dimensionality reduction for an optimal switching mode classification applied to a step-down power converter // Logic Journal of the IGPL, 2024. DOI: https://doi.org/10.1093/jigpal/jzae036.
- Eraydin H., Bakan A. F. Efficiency comparison of asynchronous and synchronous buck converter // In 2020 6th International Conference on Electric Power and Energy Conversion Systems (EPECS). 2020. Р. 30–33.
- Патент 154432 Российская Федерация, МПК G01R 31/00. Комплекс для наземных испытаний систем электропитания космических аппаратов / Е. А. Мизрах, Р. В. Балакирев, Д. К. Лобанов, А. С. Федченко, Н. В. Штабель ; заявитель и патентообладатель СибГАУ им. М. Ф. Решетнева. № 2015109968/28; заявл. 20.03.15; опубл. 27.08.15, Бюл. № 24.
- Патент 159208 Российская Федерация, МПК G01R 31/00. Комплекс для наземных испытаний систем электропитания космических аппаратов / Е. А. Мизрах, Р. В. Балакирев, Д. К. Лобанов, С. Б. Ткачев, А. С. Федченко; заявитель и патентообладатель СибГАУ им. М.Ф. Решетнева. № 2015145047/28; заявл. 20.10.15; опубл. 10.02.16, Бюл. № 4.
- Mizrah E. A., Lobanov D. K., Kopylov E. A., Balakirev R. V., Fedchenko A. S. On the Static Accuracy of Charge-Discharge Units Intended for Electrical Tests of High Capacity Li-ion Batteries. IOP. 2017, No. 255, P. 012016.
- Kopylov E. A., Lobanov D. K., Mizrah E. A. [Control process absolute stability analysis of charge-discharge device with load converter in constant power mode]. Siberian Journal of Science and Technology. 2018, Vol. 19, No. 2, P. 281–292 (In Russ.).
- Mizrach E. A., Poimanov D. N., Balakirev R. V. et al. [Automated system for simulating electrical characteristics of spacecraft power supply systems]. Siberian Journal of Science and Technology. 2016, Vol. 17, No. 3, P. 702–709 (In Russ.).
- Lobanov D. K., Mizrah E. A., Samotik L. A., Tkachev S. B., Shtabel N. V. [Energy saving simulation test complex for spacecraft power supplies full-scale electrical tests]. Siberian Journal of Science and Technology. 2020, Vol. 21, No. 3, P. 400–408 (In Russ.). Doi: 10.31772/2587-6066-2020-21-3-400-408.
- Mizrakh E. A., Solodilov I. P. Regulation of the output impedance of a specialized power supply via a control circuit. Materials of the XX International Scientific Conference of Bachelors, Masters, Postgraduate Students and Young Scientists. Krasnoyarsk, 2021, P. 379–381 (In Russ.).
- Mizrakh E. A., Solodilov I. P. A device for regulating the output impedance of a specialized power supply. Reshetnevsky readings. Materials of the XXV International scientific-practical conference, Siberian State University named after. M. F. Reshetneva. 2021, Part 1, P. 386–389.
