Сравнительный расчет низкочастотной составляющей динамических перегрузок на бортовую аппаратуру космического аппарата

Автор: Иголкин Александр Алексеевич, Шахматов Евгений Владимирович, Попков Артем Андреевич, Филипов Александр Геннадиевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 5 т.21, 2019 года.
Бесплатный доступ
В настоящей статье проведен сравнительный анализ расчёта динамической перегрузки, действующей в центре масс прибора (агрегата) космического аппарата в определённом случае эксплуатации. Эксплуатационные перегрузки, полученные из максимальных абсолютных ускорений, учитываются при проектировании креплений аппаратуры. Коэффициент безопасности, используемый в прочностных расчетах кронштейнов, напрямую зависит от точности определения нагрузок. Специалистами АО «РКЦ «Прогресс» написана программа для определения максимальных по абсолютной величине перегрузок в центре масс прибора (агрегата). Работа программы представлена на примере расчёта нагрузки на прибор ориентации по Земле малого космического аппарата «Аист-2Д». Дополнительно авторами статьи проведен расчёт рассмотренной конструкции в программе интерактивного создания и сопровождения FEMAP with NX Nastran. В качестве объекта исследования использовалась готовая верифицированная конечно-элементная модель космического аппарата. В итоге решения двумя методами, определены количественные показатели физической величины, реализующейся в узле, как результата воздействия на объект динамического ускорения. Результаты показали высокую сходимость, что подтверждает корректность работы программы.
Конечно-элементная модель, динамический отклик, коэффициент динамичности, вынужденные колебания, свободные колебания, коэффициент демпфирования, анализ переходного процесса, амплитудно-частотная характеристика
Короткий адрес: https://sciup.org/148312604
IDR: 148312604 | УДК: 629.78
Comparative calculation of the low frequency component of dynamic overloads for onboard space vehicle equipment
In this article, a comparative analysis of the calculation of the dynamic overload acting in the center of mass of the device (unit) of the spacecraft in a particular case of operation is carried out. Operational overloads obtained from maximum absolute accelerations are taken into account in the design of equipment mounts. The safety factor used in the strength calculations of the brackets directly depends on the accuracy of the determination of loads. Specialists of JSC «RCC» Progress» wrote a program to determine the maximum absolute loads in the center of mass of the device (unit). The work of the program is presented on the example of calculating the load on the Earth-orientation device of the small spacecraft «Aist-2D». In addition, the authors of the article calculated the considered structure in the program for interactive creation and maintenance of FEMAP with NX Nastran. As an object of study, a ready-made verified finite element model of the spacecraft was used. As a result of the solution by two methods, quantitative indicators of the physical quantity realized in the node are determined as a result of the impact of dynamic acceleration on the object. The results showed high convergence, which confirms the correctness of the program.
Текст научной статьи Сравнительный расчет низкочастотной составляющей динамических перегрузок на бортовую аппаратуру космического аппарата
В состав современного космического аппарата (КА) входит множество систем служебного и целевого назначения, обеспечивающих функционирование изделия и выполнение им полётного задания. Системы представляют собой навесное оборудование (НО), состоящее из приборов, агрегатов, датчиков. НО крепится к корпусу изделия с помощью крепёжных элементов (кронштейнов, посадочных плоскостей, рам) как с внешней стороны, так и внутри соответствующих отсеков.
частности, динамическое воздействие обычно выступает определяющим для бортовой аппаратуры. Оно включает в себя свободные и вынужденные колебания.
Цель данной статьи – проведение сравнительного анализа определения динамического поведения приборов и агрегатов космического аппарата, при воздействии на неё внешних возмущающих факторов.
ВЫСОКОЧАСТОТНЫЕИ НИЗКОЧАСТОТНЫЕ КОЛЕБАНИЯ
Вибрационная устойчивость – важная задача при проектировании КА. Действие вибраций (высокочастотных процессов) на этапе полёта в составе ракеты космического назначения (РКН) негативно сказывается на вибропрочности бортовой аппаратуры, закреплённой на корпусе изделия при помощи кронштейнов и посадочных плоскостей [1]. Источником вибраций преимущественно выступают: двигательная установка в процессе работы, колебания топлива в магистралях, работа силовых гироскопов системы управления КА.
Вибрации и удары приводят к образованию усталостных трещин в кронштейнах, ослаблению болтовых соединений и образованию других дефектов, что может привести к разрушению.
Помимо описанных вибраций на аппаратуру КА воздействуют низкочастотные корпусные
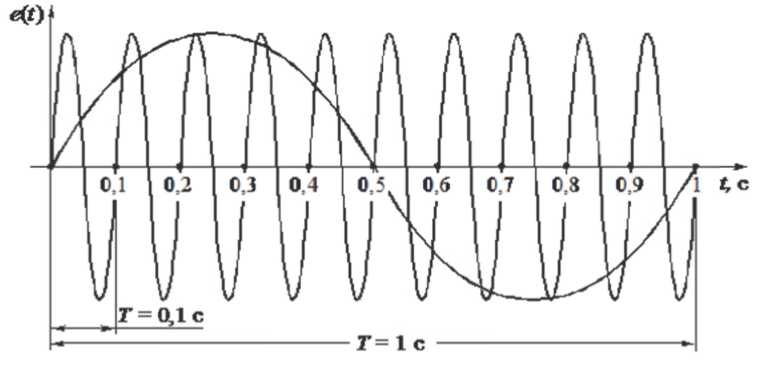
Рис. 1. Высокочастотные и низкочастотные процессы
процессы, совместно они показаны на рис. 1. Данный вид нагрузки даёт наибольший отклик конструкции в моменты старта, максимального скоростного напора, разделения ступеней и др.
Каждая из перечисленных составляющих оказывает значительное воздействие на поведение конструкции КА на этапе выведения. Смоделировать общую динамику КА, максимально приближенную к реальной – главная задача инженера-конструктора.
ДИНАМИЧЕСКИЙ РАСЧЕТ КОНСТРУКЦИИ
Для выполнения расчёта строится конечно-элементная модель (КЭМ). Она должна учитывать многие нюансы конструкции объекта исследования, так как от этого напрямую зависит точность полученных данных. Для расчёта нагрузок на установки агрегатов, приборов используются следующие исходные данные:
-
а) массовые, центровочные и инерционные характеристики установок;
-
б) узлы крепления основных установок на силовом корпусе изделия (тип закрепления);
-
в) жесткостные характеристики установок агрегатов, приборов в виде перемещения центра масс приборов, агрегатов под действием собственного веса в любом направлении.

Рис. 2. Прибор ориентации по Земле
В качестве объекта исследования в данной статье выступает прибор системы управления движением (СУД) малого космического аппарата (МКА) «Аист-2Д» [2]. Задача состоит в определении низкочастотной динамической перегрузки, действующей в центре масс прибора при расчетном случае «максимальный скоростной напор» на этапе полета в составе РКН.
Предварительно проведен анализ амплитудно-частотных характеристик (АЧХ) конструкции МКА «Аист-2Д» (рис. 2) [3]. С помощью программного комплекса Femap with NX Nastran вычислены максимальные перегрузки в центре масс прибора (рис. 3). Использовался анализ переходных процессов [4]. Результат отражен в табл. 1.
МЕТОД ОЦЕНКИ НАГРУЗОК НА БОРТОВУЮ АППАРАТУРУ ПРОГРАММОЙ «AGENA 4»
Систему прибор–кронштейн называют установкой и, для упрощения математических рас-
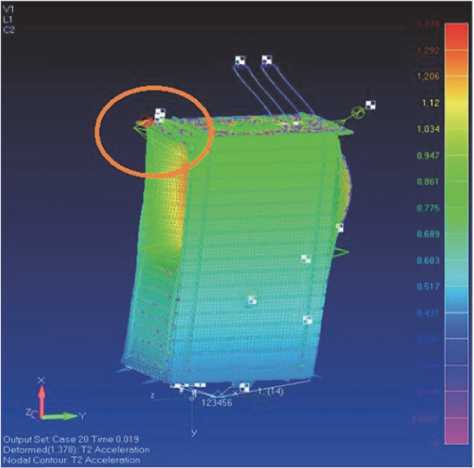
Рис. 3. Максимальный отклик конструкции в направлении оси Y
Таблица 1. Максимальная низкочастотная составляющая динамической перегрузки в центре масс прибора (использование программного обеспечения Femap/NX Nastran)
|
Направление |
Перегрузка |
|
X |
0,51 |
|
Y |
1,38 |
|
Z |
1,00 |
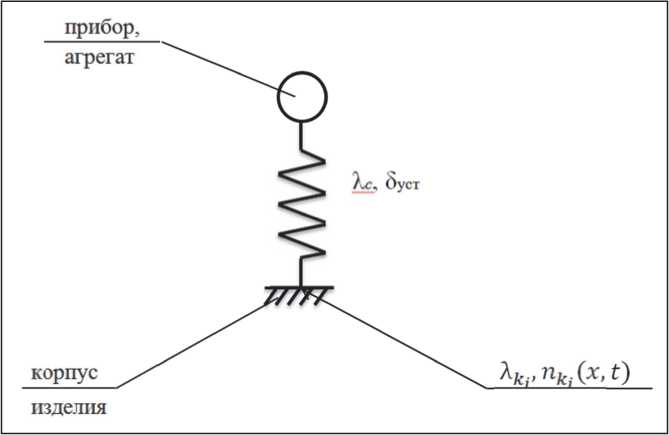
Рис. 4. Расчётная схема установки прибора (агрегата)
чётов, представляют как «массу на пружине» (рис. 4). Каждая из таких систем имеет свои динамические характеристики и определённым образом оказывает воздействие на всё изделие.
В данном методе, для расчёта нагрузок на установки приборов и агрегатов, используется программа, написанная на языке Fortran. Она позволяет определить коэффициент динамичности, связывающий значения ускорения в центре масс установки и ускорения на корпусе, в месте крепления кронштейна.
Для её использования необходимо знать, помимо частоты и перегрузки, которые реализуются на корпусе (в месте крепления кронштейна), динамические характеристики рассматриваемой установки.
Собственные частоты колебаний рассматриваемой установки, полученные по результатам анализа АЧХ, приведены в табл. 2. Система координат совпадает с системой координат изделия.
Работа программы основана на следующих принципах. Для расчётной схемы «корпус – прибор» (рис. 4) коэффициент динамичности определяется из решения дифференциального уравнения, описывающего колебания одномассовой упругозакрепленной системы с колеблющимся основанием, как отношение максимального ускорения на массе к максимальному ускорению основания системы:
Ут^'О — ^ т (У осн (^) — ym(t)) —
-
om ■ ^m
-----(УтЮ -У оснШ
Я где ym– перемещение массы,
ω m – круговая частота собственных колебаний системы, ω m =2 πλ уст ,
δm – логарифмический декремент собственных колебаний системы, δm = δуст , yосн(t)– перемещение основания системы, определяемое заданным ускорением основания системы:
Таблица 2. Собственные частоты колебаний установки
|
Направление |
Частота, Гц |
|
X |
96,0 |
|
Y |
51,0 |
|
Z |
83,0 |
У осн (0 = e-W sin(2^Afcit) ■ п^ ■ - -!_ , (2)
X с , 5 уст - частота и логарифмический декремент собственных колебаний установки прибора, агрегата;
X k , nk ( x )- частота колебаний корпуса изделия и амплитуда перегрузки (ускорения) в месте крепления прибора, агрегата по длине корпуса изделия на i- ой частоте колебаний корпуса изделия;
Мх’t) = ^kt(x) ■ -Т^ ■ е ■ sin(2^X k it) ,(3)
где 5 k, - демпфирующий коэффициент, для учёта нестационарности колебаний корпуса изделия [5].
Графическое представление колебаний системы изображено на рис. 5.
В структуре программы приняты следующие обозначения:
Nstrok - количество обрабатываемых строк;
wk - частота колебаний корпуса (Гц);
Dk - логарифмический декремент корпуса;
Pk - ускорение на корпусе (м/с2);
wm - частота колебаний установки прибора (Гц);
Dm - логарифмический декремент установки прибора;
Nzikl - количество циклов корпусных колебаний;
ndt - количество шагов за период колебаний;
dPkk - изменение ускорения корпуса в квадрате.
Исходные данные и результаты решения отражены в табл. 3 - 4. Каждая из осей соответствует системе координат изделия (X - вертикаль-
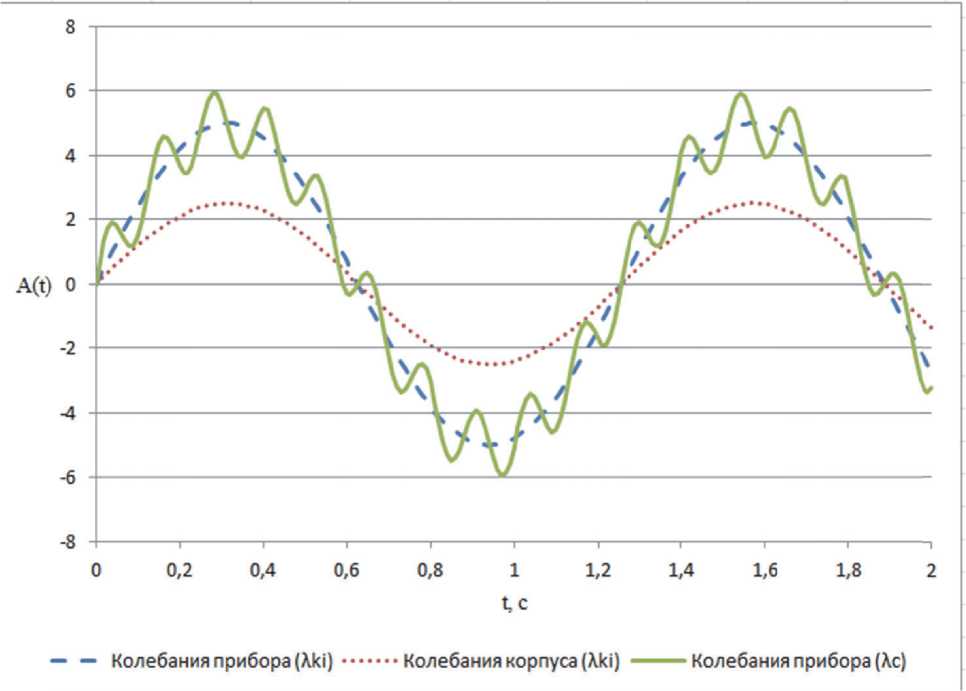
Рис. 5. Колебания установки прибора (агрегата) по времени
Таблица 3. Входные данные
|
Направление |
wk |
Dk |
Pk |
wm |
Dm |
Nzikl |
ndt |
dPkk |
|
X |
30,0 |
0,3 |
5,0 |
96,0 |
0,3 |
500,0 |
100,0 |
0,0 |
|
Y |
15,0 |
0,3 |
10,5 |
51,0 |
0,3 |
500,0 |
100,0 |
0,0 |
|
Z |
16,3 |
0,3 |
9,0 |
83,0 |
0,3 |
500,0 |
100,0 |
0,0 |
Таблица 4. Выходные данные
|
Направление |
П к |
n yCT |
Р уст |
|
X |
0,50 |
0,52 |
1,04 |
|
Y |
1,05 |
1,39 |
1,32 |
|
Z |
0,90 |
0,97 |
1,08 |
Таблица 5. Сравнение результатов
ОБСУЖДЕНИЕ ПОЛУЧЕННЫХ РЕЗУЛЬТАТОВ
Мы получили низкочастотную составляющую ( λ k на рис. 5) максимального динамического отклика установки прибора. Для получения суммарной динамической нагрузки необходимо вычислить вибрационную составляющую ( λ c на рис. 5).
В табл. 5 приведено сравнение результатов решения двумя методами. Значения показывают величину перегрузки, реализующейся в центре масс прибора в каждом из направлений. Видно, что показатели имеют пренебрежимо малое расхождение по величине.
ВЫВОДЫ
Проведен расчёт низкочастотных нагрузок на прибор ориентации по Земле МКА «Аист-2Д» с помощью программы конечно-элементного моделирования и с использованием программы расчёта динамики бортовой аппаратуры. Результаты показали высокую сходимость, что подтверждает возможность использования программы.
Изложенная программа может быть использована при расчётах нагрузок на бортовую аппаратуру не только ракетно-космической техники, но и авиационной техники, автомобилестроения. Она позволяет с достаточной степенью точности спрогнозировать динамическое поведение конструкции в различных расчётных случаях.
Результаты исследования были получены в рамках выполнения государственного задания Минобрнауки России (Проект № 9.1517.2017/ПЧ, 0777-2017-0016.).
Работа выполнена при финансовой поддержке Министерства науки и высшего образования
Российской Федерации в рамках формирования государственных заданий высшим учебным заведениям и научным организациям в сфере научной деятельности (Проект № 9.1517.2017/ПЧ, 0777-2017-0016).
Список литературы Сравнительный расчет низкочастотной составляющей динамических перегрузок на бортовую аппаратуру космического аппарата
- Безмозгий, И.М. Моделирование в задачах вибропрочности конструкций ракетно-космической техники [Текст] / И.М. Безмозгий, А.Н. Софинский, А.Г. Чернягин // Космическая техника и технологии № 3 (6) - 2014. - С. 71-80.
- Кирилин, А.Н. Опытно-технологический малый космический аппарат "АИСТ-2Д" [Текст] / А.Н. Кирилин [и др.]. Самара: Самарский научный центр РАН. - 2017. - 324 с.
- Иголкин, А.А. Влияние жёсткости соединений элементов конструкции на амплитудно-частотные характеристики объекта [Текст] / А.А. Иголкин, А.И. Сафин, А.Г. Филипов, А.А. Попков // Февральские чтения. Тезисы. Баку. - 2019. - С. 7-9.
- Попков, А.А. Определение нагрузок для прочностных расчетов узлов крепления приборов и агрегатов космического аппарата на активном участке полета [Текст] / А.А. Попков, В.А. Филатов, А.Г. Филипов // Вектор науки ТГУ № 1 (47). - 2019. - С. 50-57.
- Панферов, В.И. Моделирование нестационарных процессов в газопроводах [Текст] / В.И. Панферов, Панферов С.В. // Вестник ЮУрГУ №14. - 2007. - С. 44-47.
