Средства механотроники при управлении технологическим процессом обработки почвы

Автор: Калиниченко Валерий Петрович, Шаршак Владимир Константинович, Зинченко Владимир Евгеньевич, Ладан Евгений Пантелеймонович, Генев Евгений Дмитриевич, Илларионов Виктор Васильевич, Черненко Владимир Владимирович, Дьяченко Виктор Викторович, Еременко Николай Петрович, Скворцов Дмитрий Алексеевич
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Механизация и электрификация животноводства, растениеводства
Статья в выпуске: 2 (18), 2012 года.
Бесплатный доступ
На основе механотроники возможно создание систем нового поколения для управления роботизированными сельскохозяйственными, мелиоративными, дорожными и др. машинами.
Механотроника, механический датчик положения рыхлителя, информационно-логическая электронная система управления
Короткий адрес: https://sciup.org/140204154
IDR: 140204154 | УДК: 631.1:631.459(470.61):633.11
The mechanotronics facilities by management of the cultivation process
Application of the mechanotronics technology by management of the soil deep processing is offered. On the basis of this technology creation of new generation systems for management of the robotized agricultural, land-reclamation, road and other machines is possible.
Текст научной статьи Средства механотроники при управлении технологическим процессом обработки почвы
Проблема управления глубиной обработки почвы актуальна при разработке техники для строительства, сельского хозяйства.
Технические средства создания устойчивых высокопродуктивных биогеосистем требуют применения современных представлений механотроники. Средства механотроники позволяют достичь качественно новых результатов в управлении технологическими процессами, в том числе в обработке почвы.
Прямой способ управления глубиной механической обработки почвы путем ее контроля с помощью опорных колес, которыми снабжено навесное устройство, является самым простым. В рабочем положении устройство опускают на поверхность почвы, переводят гидравлический привод навесной системы в плавающее положение, когда гидроцилиндр навесной системы соединен с масляным резервуаром. Жидкость перетекает по гидравлической системе под воздействием усилия, передаваемого на гидроцилиндр от устройства в процессе копирования им обрабатываемой поверхности опорными колесами. Навесная система практически не придает устройству вертикального усилия, техническое решение обусловливает свободное взаимное перемещение трактора и устройства по вертикали. Недостаток способа в том, что, поскольку устройство оказывает большое тяговое сопротивление перемещению трактора, массу трактора выбирают большой и даже применяют его дополнительное утяжеление [1].
Известен способ управления глубиной механической обработки почвы путем гидравлического увеличения сцепного веса трактора [2]. Способ характеризуется косвенным способом информации о заглублении рабочего органа навесного орудия, поэтому глубиной обработки управляет неудовлетворительно.
Известно устройство для управления глубиной обработки почвы фрезерным рыхлителем, имеющее электрический датчик глубины обработки почвы [3]. В устройстве отсутствует электронная систе ма защиты, что снижает надежность почвообрабатывающей машины.
Актуально применение методов ме-ханотроники при управлении глубиной обработки почвы.
Устройство состоит из почвообрабатывающей машины с рыхлящим рабочим органом [4-7]. В качестве машины может быть использован, например, фронтальный ротационный внутрипочвенный рыхлитель 1 (рис. I, 2).
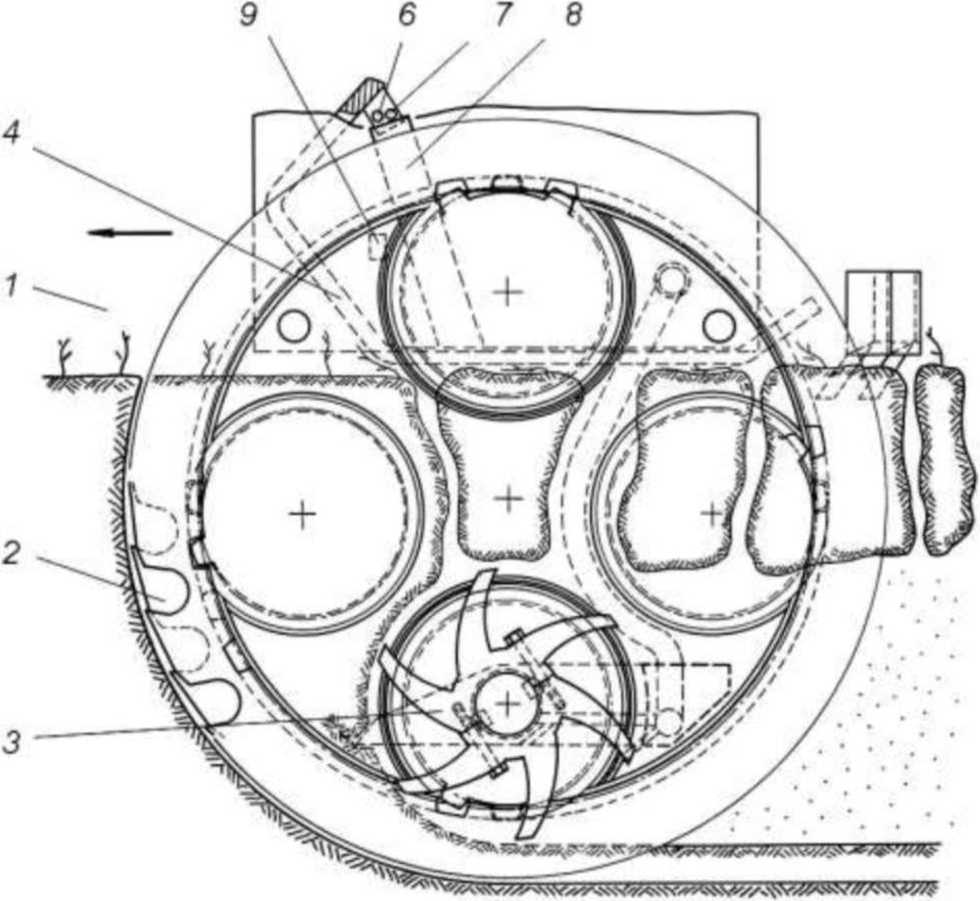
Рис. 1. Устройство управления глубиной обработки почвы, вид сбоку
Устройство состоит из почвообрабатывающей машины с рыхлящим рабочим органом, например, фронтального ротационного внутрипочвенного рыхлителя 1 со щелерезами привода 2, валом фрезеровате-ля 3 и информационно-логического исполнительного блока, содержащего информационно-логическую электронную систему управления (рис. 3). Механический датчик положения рыхлителя относительно почвы выполнен в виде опорной лыжи 4, установ ленной между щелерезами 2, с открытой двойной оптоэлектронной парой, состоящей из светоизлучающего инфракрасного диода 5 и инфракрасных фотодиодов б, 7 (соответственно, VDl, VD2 на рис. 2), с механической оптической шторкой 8 управления оптической связью в оптоэлектронной паре, электронно-механическим датчиком предельного замедления рыхлителя 9 на кронштейне рамы рыхлителя 1.
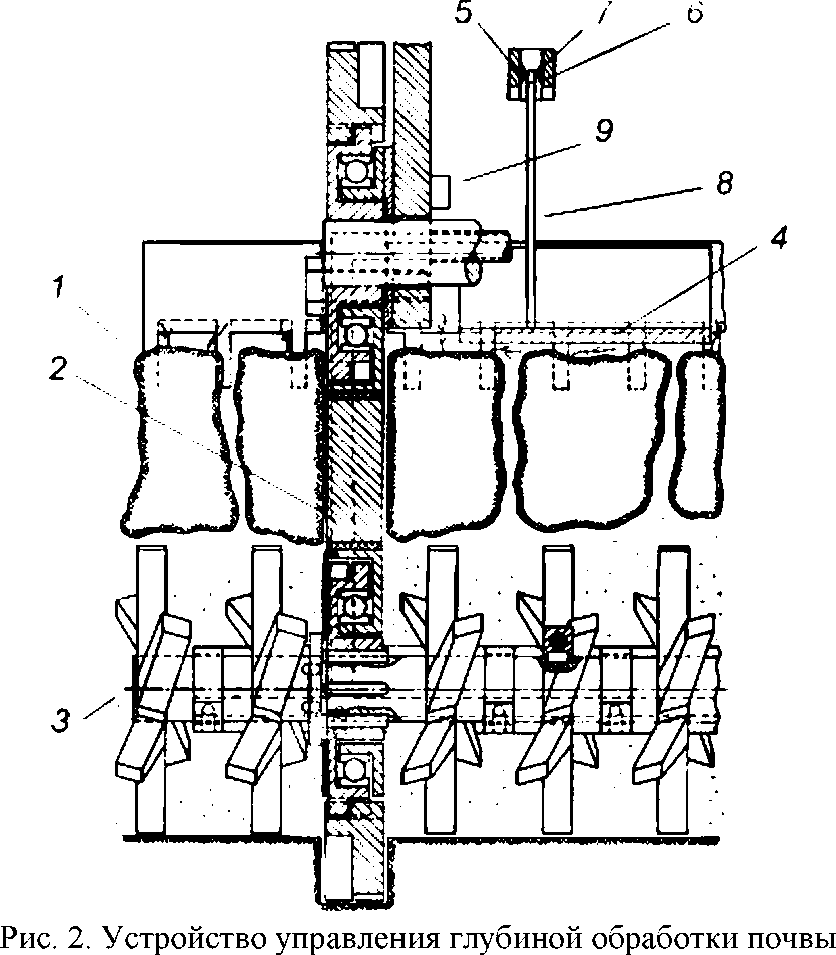
Датчик положения навесной системы трактора содержит оптическую шторку, установленную на верхнем валу навесной системы трактора, которая управляет оптической связью в открытых оптоэлектронных парах между светоизлучающим инфракрасным диодом и инфракрасным фотодиодом VD8, инфракрасным диодом и инфракрасным фотодиодом VD3. Оптоэлектронные пары установлены в едином блоке на неподвижном относительно трактора кронштейне верхнего вала навесной системы трактора.
Инфракрасный фотодиод контролирует угол наклона карданного вала привода рыхлителя в транспортном положении -25° относительно продольной оси трактора. Другой инфракрасный фотодиод контролирует угол наклона карданного вала привода рыхлителя в рабочем положении +15° относительно продольной оси трактора.
Информационно-логическая электронная система управления (рис. 2) содержит: задающий генератор на инверто рах, на логических элементах «2и-не» DD1.1, DD1.2, резисторе R1, конденсаторе С1; блок регистрации информации о глубине обработки почвы на инфракрасных фотодиодах VD1, VD2 (6, 7 по рис. 1), задающих начальный ток инфракрасных фотодиодов на резисторах R2, R3, инверторе на логическом элементе «2и-не» DD1.3, логическом элементе «2и-не» DD1.4, фильтре низких частот на резисторе R5 и конденсаторе С2, D-триггерах DD2.1, DD2 2; блок принудительного извлечения фронтального ротационного внутрипочвенного рыхлителя из почвы на двухпозиционном переключателе S А1; блок оптикомеханической фиксации нейтрального положения механической оптической шторки на логическом элементе «2и-не» DD3. I, резисторе R6, инфракрасном фотодиоде VD4, логическом элементе «2и-не» DD3.2, резисторе R7, инфракрасном фотодиоде VD5; оптико-механический блок контроля исполнения логических команд на логическом элементе «4и-не» DD4.1, резисторе R8,
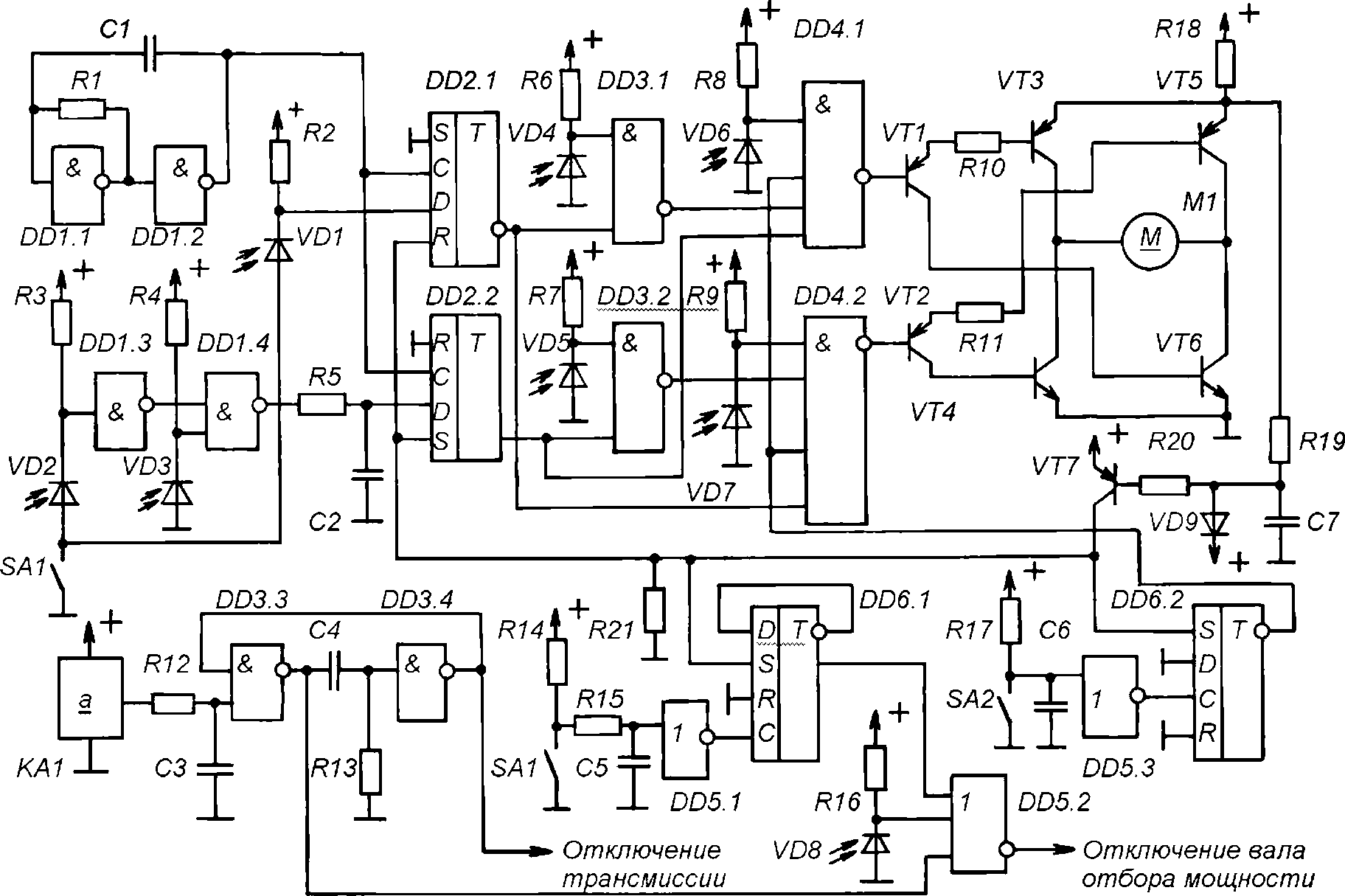
Рис. 3. Принципиальная электрическая схема информационно-логической системы управления глубиной обработки почвы
инфракрасном фотодиоде VD6, логическом элементе «4и-не» DD4.2, резисторе R9, инфракрасном фотодиоде VD7; оптикомеханический блок защиты рыхлителя и трактора от механических перегрузок, содержащий узел контроля предельного угла наклона карданного вала привода рыхлителя не более +15° относительно продольной оси трактора с оптической шторкой с открытой оптоэлектронной парой на светоизлучающем инфракрасном диоде (5 на рис. 2), инфракрасном фотодиоде VD3, задающим ток резистором R4; блок предельного замедления рыхлителя с датчиком КА1, фильтром низких частот на резисторе R12 и конденсаторе СЗ, ждущим мультивибратором на логических элементах «2и-не» DD3.3, DD3.4, конденсаторе С4 и резисторе R13; оптико-механический блок контроля угла наклона карданного вала в транспортном положении -25° относительно продольной оси трактора с оптической шторкой 21 в открытой оптоэлектронной паре на светоизлучающем инфракрасном диоде 26, инфракрасном фотодиоде 27 (VD8 на рис. 2), на логическом элементе «Зили-не» DD5.2, резисторе R16; блок электронного включения вала отбора мощности на нормально разомкнутом однопозиционном переключателе SA2, резисторах R14, R15, конденсаторе С5, инверторе на логическом элементе «Зили-не» DD5.1, D-триггере DD6.1; блок электронного включения информационно-логического исполнительного устройства на нормально разомкнутом однопозиционном переключателе SA3, резисторе R17, конденсаторе С6, инверторе на логическом элементе «Зили-не» DD5.3, D-триггере DD6.2; исполнительный блок на ключевых транзисторах VT1-VT6 с реверсивным электродвигателем постоянного тока М1; блок электронного включения ждущего режима информационно-логического управления при ручном воздействии на рычаг гидравлического распределителя штатной навесной системы трактора на резисторах R18, R19, R20, конденсаторе С 7, транзисторе VT7 с узлом подготовки включения ждущего режима устройства в момент включе ния питания информационно-логической электронной системы на диоде VD9.
Информационно-логическая электронная система управления (рис. 3) регистрирует заданный режим фронтального ротационного внутрипочвенного рыхлителя 1 (D-триггеры DD2.1, DD2.2), задает предел перемещения оптической шторки информационно-логического исполнительного блока (инфракрасные фотодиоды VD6, VD7), разрешает возврат оптической шторки информационно-логического исполнительного блока из верхнего (нижнего) рабочего положения в нейтральное (инфракрасные фотодиоды VD4, VD5), вырабатывает сигналы управления электродвигателем Ml (ключи VT1-VT6).
Исполнение датчика положения рабочего органа рыхлителя в виде опорной лыжи, смонтированной на раме рыхлителя, с возможностью упругой деформации при вертикальной нагрузке 0,1 веса фронтального ротационного внутрипочвенного рыхлителя позволяет контролировать нагрузку на почву в соответствующем диапазоне усилий. Соответственно, вес орудия практически целиком переносится на колеса трактора, увеличивая их сцепление с обрабатываемой поверхностью.
Трактор и устройство соединены гидравлической системой, которая в рабочем режиме находится в нейтральном положении, перепускные отверстия гидроцилиндра перекрыты. Это определяет большой момент инерции устройства относительно его центра, устройство работает стабильно, поскольку ликвидируются условия возникновения интенсивных перемещений устройства относительно точки присоединения к трактору. Обеспечивается равномерность глубины обработки грунта или почвы, меньший износ агрегата.
В устройстве применены принципиально новые элементы: датчик вертикального положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы в виде опорной лыжи с механической оптической шторкой и двойной оптоэлектронной парой; информационно-логический исполнительный блок постоянной глу- бины обработки почвы с сервоприводом; электронно-механический датчик предельного замедления рабочего органа; датчик угла наклона вала отбора мощности трактора относительно продольной оси трактора в виде оптико-механического электронного датчика положения; логической электронной системы управления информационнологического исполнительного блока [8].
Выводы
-
1, Управление глубиной обработки почвы следует выполнять с помощью устройства, которое снабжено датчиком вертикального положения рабочего органа фронтального ротационного внутрипоч-венного рыхлителя относительно поверхности почвы в виде опорной лыжи, выполненной на раме рыхлителя. Лыжа выполнена с возможностью упругой деформации ее опоры при вертикальной нагрузке 0,1 веса фронтального ротационного внутри-почвенного рыхлителя. Устройство снабжено информационно-логическим исполнительным блоком постоянной глубины обработки почвы, логической электронной системой управления.
-
2. Устройство управляет распределителем штатной навесной системы трактора, запрещает опускание навески трактора, отключает трансмиссию и вал отбора мощности трактора, позволяя при движении агрегата управлять глубиной обработки почвы фронтальным ротационным внутрипочвен-ным рыхлителем с высокой стабильностью, качеством, надежностью и меньшими, чем у стандартных технических решений, затратами энергии.
-
3. На основе методов механотроники возможно создание систем нового поколения для управления роботизированными сельскохозяйственными, мелиоративными, дорожными и другими машинами.
