Стабилизация измерительной головки, подвешенной в трехстепенном кардановом подвесе

Автор: Лутманов С.В., Маймуст Д.В., Цветков Г.А.
Статья в выпуске: 2, 1994 года.
Бесплатный доступ
Приводятся результаты теоретического исследования механизма стабилизации меридиана.
Короткий адрес: https://sciup.org/146211736
IDR: 146211736
Текст научной статьи Стабилизация измерительной головки, подвешенной в трехстепенном кардановом подвесе
В работе решается
задача о стабилизации следующею механизма.
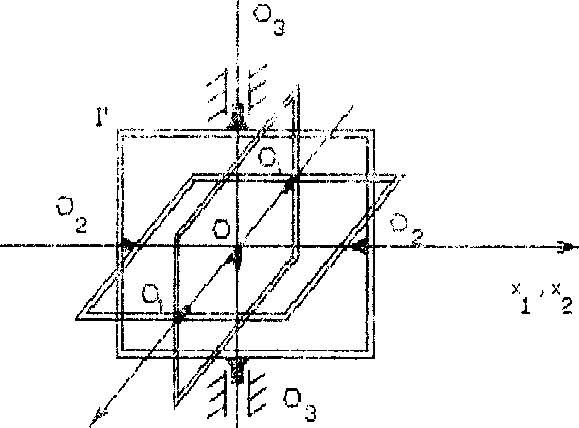
Измерительная головка а жестко связана с внутренней рамой Б • рданова подвеса сем. рисл^, которая может вращаться ;яносительно оси оо связанной с рамой в, вращающейся относительно оси о„о , связанной с внешней рамой Г. 8 свою очередь внешняя рама Г может вращаться относительно оси о о связанной с неподвижным основанием.
С неподвижным основатием лем абсолютную систему отсчета о<г- . Ось оу направим вертикально вниз, а оси о? и о?, расположи.: в горизонтальной плоскости так, чтобы система координат была правей. 0 внешней рамой подвеса свяжем систему координат oxjz. Ось oz направим по оси вращения внешней рамы, ось ох„. по оси вращения средней рамы и осью oz дополним систему до правой тройки. Go средней рамой свяжем систему координат
^^'z^z^z Ось ОХ2 н^равим вдоль оси вращения средней рамы, ось oz - вдоль оси вращения внутренней рамы и осью oz, дополним систему до правой тройки. С внутренней раной свяжем систему координат ох y z . При этом ось ох натравим по оси вращения внутренней рамы, ось oz натравим таким образом, чтобы она была вертикальной евниз^ в положении, когда средняя рама горизонтальна, а внутренняя вертикальна. Ось ох дополняет систему до правой тройки.
Через «, ^, у, обозначим углы поворота с против часовой стрелки^ средней, внутренней и внешней рам соответственно.
Н-э^алэ отсчета е^т), Р=0, г^О определяется так, чтобы для него средняя рама занимала горизонтальное, внутренняя - вертикальное сложения, з система отсчета ox_ Y z совпадала с абсолютней 'ИСТ ЛОЛ C^'w.
У1 ^2'^3' 17
Рис.I.
Принимается, что рамки тюдЕзеса абсолютно жесткие, общин .центр тяжести головки и внутренней рамки, а также средней и внешней панки расположены в центре кардансва подвеса - в точке О Координатные оси системы ох урт совпадают с общими главными " ями жерчди измерительной головки и внучренней рамки, о -ксг’ртдыач стогом оч^с рг^ и ox y т - с главными (осями инерцс-о средней и внешней рамок, соответственно.
Управление механизмом осуществляется посредством вращательных моментов, действующих относительно осей вращения каждой из рамок.
Принимая углы л, р, у за обобщенные координаты и следуя работе г3:, выведем уравнения .движения механизмом. Заметим, что матрицы преобразования координат имеют следухяций зид:
А
Г COSV
- si п^
О
Si пу ccsy
О
О >
О
зг.
" 1
О
о
si Г1С1
~Sina СОЗСХ
cosp о si пр
<1 j
Обозначим через S”, о^П о^’- углевые скорости внутренней, средней и внешней рамок соответственно. Тогда абсолютные угловые скорости этих рамок п . ci , <5^ будут вычисляться по формулам
> = О
Э 3
> -= а 2 3
О = Q + О'
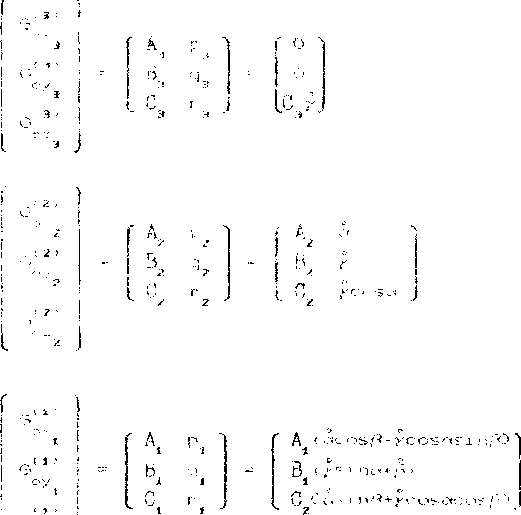
Пусть ср. , о .г^- - проекции вектора п в системе координат ох у z. Выразим эти координаты через обощенные координаты и обегенные скорости. Последовательно имеем:
Наймуст Д. В. , Чветтов Г . А


Обозначим через а , В, , С главные моменты инерг соответствующих рэмпк относительно осей ох оу , oz . 1=1, а. Запишем кинетические моменты каждой из рамок относительно цент кард-.-чова подвеса в проекциях на оси i -й системы координат, учетом формул С4> имеем:
ати у а
Обозначим через n*3’, n42^ й'1’ главные моменты внешних по отношению, соответственно, ко всему механизму, средней л внутренней с совместно с измерительной головкой) рамке и внутренней с совместно с измерительной головкой) рамке сил.
Заметим, что м'э> = и , ,ы’2> = и . ы“’ = и , се)
Z3 3 х2 2 yl 1
а проекции г'^, ы*3>, n^2’. n^’, iT^ представляют собой моменты нормальных реакций опор одо , о о2. о о относительно соответствующих осей.
Запишем теорему об изменении кинетического момента по „'’ношению к каждой из рамок. На основании 3-го закона Ньютона имеем:
,<г,э> о гт<э> г42'° dtdt
N
сг>


f3°’.
С 7)
Используя понятие локальной производной, перепишем равенства с?):
На основании формул С4), со из уравнений се) выводим:
В D/ s 1 пу лВи <^si н(3*у<.
N
Ox
Из уравнения с 9d исключаем величины ы'", и'1’, н'2\ ы^:
\v , м<3' и полученные уравнения разрешаем относительно старших з v з производных:
0 F Ci + n‘Z>P Q - FP О - Ni3>P о + ЕС Р * г4!5>п Р о О 13 1 х2 3 1 2 1 кЗ 2 \ 3 2 yl ’3 2
Т
OCR Р - R Р ) * О F R 12 3 ЭХ 3 2 1
-R I СР С * n'^'P О - FP О - N 3>Р О ♦ ЕО Р + N1 *’с Р ) 1 3 1 х2 3 1 2 1 23 2 1 3 2 VI 3 2
Q ( Q С R Р 1 12 3
3 2
* О Р р 1 а 1
С Е+ N '1' О t Q С Р Р - R Р 0 + О Р R 1 у 1 1 2 3 3 2 3 2 1
С 1 СО.
Q Г Q С R Р 112 3
Р Р 3 Z
•РЕЗ
3 2 1
<С+Ы!2’:>[С>
? .= ---------------------------------------------------
Р Г с ' Р Р - R Р > - о Р R ]
2 3 2 "3 21
Г4 ' Р z з
г Р + Н(1>О Г- 3 Э 2 у 3 2
Г (OCR Р
Z 12 Э
Р -О > О -В . Р - В sina, Р = А * A cc^;Z(3 + С si п2 . О
R -С С -А ? со< ctsi rJ3cos(3 ъ Р —v С - A )cos/i'Si i:^c;?S6v, С - В Sina, 2 11 3 11 31
R =С В + В )sinZa + С +СС + С eos.213 A sinZ^jcosZa,
3 2 1 3 2 11
Е --В yck -СА^- С DCacos^ ^ fcosacosfDCacos/? - ^ccs^si п/?^
х >2(В + В “ С - С
cos,2<3
Д si
ji2/O
cos
12 2 1 1
yct'S^sin/? +■ >/<[ cos2 [$< Д — r з В ^) 3 /КС + В - A )]cosa illiii
F — ^a^sinncosatB - С + В ' A sinZf^ - C cos2/?) - a Ac: osx г 2 t ii х! г? *СС — A )Ccos2/? - sin2/?)) ™ 2$xcos/5si nf^cos2 оС A - C j - c/sinflcostfsinaCA - C 3
C 11
Уравнения ciod, (id будем называть полной механизма.
моделью функции система
Сформулируем зада ч стабилизации.
Задача: определив управления и. i-i.a.a как фазового вектора са./з.у ,а,^То так, чтобы дифференциальных уравнений сю), сш после подстановки в нее найденных управлений, была ассимптотически устойчива. При этом дтго. мнительно требуется, чтобы отклонение фазовых координат от нуля уменьшилось в заданное число раз по отношению к начальному по истечению фиксированного промежутка времени.
Решение этой задачи проведем на базе анализа линеаризованных в окрестности начала координат уравнений с юз, сю, которые после отбрасывания членов высшего порядка малости принимают вид:
В выражении ci4:> величины s . д . 1=ГГз - суть постоянные коэффициенты, найденные из условия отрицательности мнимых частей корней характеристических уравнений для системы ог:-, в которой управления и, . >-з,г,з заменены по формулам яг-, а также условия достаточной малости отклонения фазового вектора от нуля к зчданн‘ ‘му моменту времени.
В частности, для случая, когда т=о. i сек., начальные at, рае
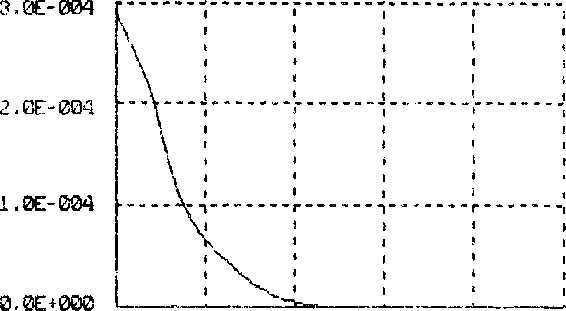
0.00 0.02 0.04 0.06 0.08 0.10
Рис.
а
об, рад
5.0Е-003
0.0Е+000
-5.0Е-003
-1.0Е-002
-1.5Е-002
-2.2Е-002
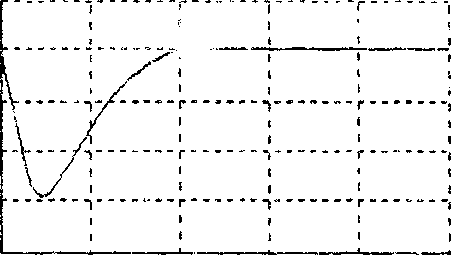
0.00 0.02 0.04 0.06 0.08 0.10
Рис. 26
4 =jO-Z-J , A ^W-1O2-J , z-ao. 0-150 '15?
Из теории устойчив .;оти известно сем, например газ;., что если корни характеристичес ..„-гп уравнения линеаризированной задачи имеют строго отрицательные мнимые части, то и нелинейная задача ассимптотически устойчива. Это ггредложение было подтверждено ■злеленными расчетами с полной моделью ою, (и>, в которой управления и с1=Г7зб опредвлядись по формулам <14?, сю?..
Численное решение указанной задачи иллюстрируется графическими зависимостями угловых координат и соответствующих скоростей сем. рис. 2а-б?. В качестве примера приводятся графики юордина'1’ а, а с две другие пары оообщенлых координат имеют аналогичную качественную интерпретацию.
Из графиков га-б видно, что где-то в районе t=O.OB сек. с расчетное время стабилизации положения измерит с явной головки г=о.1 сек.) численные значения обобщенных координат укладываются в требуемую по отклонениям погрешность <напомним, что она составляет 1% от начальных условий.' и в точке т-0.1 сек. имеет’ значение порядка ю"7, что соответствует решенигэ поставленной задачи.
Таким образом. выбранные для линеаризованной (исгео/ управления вида ci4? с коэффиг^нтами обеспечивакл' геыен-’о задачи стабилизации для исходной нелинейной модели.
