Стабилизация программных движений большой динамической системы с ограничениями на векторы координат и управлений

Бесплатный доступ
Задачи стабилизации программных движений и положения равновесия - актуальные прикладные задачи современной теории автоматического управления. В данной работе для стабилизации положения равновесия и программных движений большой нелинейной динамической системы, состоящей из s подсистем, применяются проекционно-операторные методы математического программирования. Большая динамическая система представлена в виде блочно-диагонального оператора с блоками, заданными нелинейными стационарными разностными операторами. В качестве примера рассмотрен блочно-диагональный оператор электроэнергетического объединения, состоящего из трех электроэнергетических систем, подключенных к шине бесконечной мощности линиями электропередач.
Большие нелинейные динамические системы, блочно-диагональный оператор, стабилизация программных движений, ограничения на векторы состояний и управлений, проекционные операторы
Короткий адрес: https://sciup.org/148330049
IDR: 148330049 | УДК: 681.51 | DOI: 10.18137/RNU.V9187.24.03.P.53
Stabilization of program movements of a large dynamic system with constraints on coordinate and control vectors
The problems of stabilization of programmed movements and equilibrium positions are topical applied problems of the modern theory of automatic control. In this work, to stabilize the equilibrium position and stabilize the programmed movements of a large nonlinear dynamic system consisting of “s” subsystems, projection-operator methods of mathematical programming are used. A large dynamical system is defined as a block-diagonal operator with blocks defined by nonlinear stationary difference operators. As an example, the article considers a block-diagonal operator of an electric power association consisting of three electric power systems connected to an infinite power bus by power lines.
Текст научной статьи Стабилизация программных движений большой динамической системы с ограничениями на векторы координат и управлений
Задачи стабилизации положения равновесия и стабилизации программных движений выделены в отдельные классы задач управления [1]. Указанное разделение классов определяет современные прикладные задачи синтеза динамических систем, таких как управление летательными аппаратами [2; 3], объектами водного транспорта [4–6] и др. [7–9]. Для решения задач стабилизации положения равновесия и программных движений используются методы бэкстеппинга [10–12], обратных задач динамики [13] и др. [14; 15].
Ефремов Артем Александрович
В работе для стабилизации программных движений большой динамической системы применяются проекционно-операторные методы математического программирования [16–18]. Указанные методы отображают параметры функционала и ограничений задач математического программирования в допустимые или оптимальные решения.
Оператор решения задач стабилизации программных движений
Большая динамическая система, образованная из s подсистем, определена блочно-диа- гональным оператором вида ˆˆ
X k + 1 = H ( X k ) + FU k ,
ˆ
Y k = C y X k , X k 0 = X o
В блочно-диагональном операторе (1) введены следующие обозначения:
-
• блочный вектор фазовых координат динамической системы, состоящий из фазовых
координат s подсистем, с блоками размера n : X k = [ x k ,—, x k ,—, x k J e R s x n ;
-
• блочный вектор управляющих воздействий динамической системы с блоками разме-
- U 1 i s T s x m k = [uk,''',uk,''',ukJ eR ; • блочный вектор выходных координат динамической системы с блоками размера l: Yk Гуk ’"•’yk,''', yk ]T e Rsxl; • блочный нелинейный вектор динамической системы, состоящей из s подсистем, с блоками размера n: IH (xk ) = [H1 (xk) ,'„, Hi (xk) ,'„, Hs (xk )J e R(sxn), Hi (xk )e Rn; • блочно-диагональная матрица управлений динамической системы с блоками размера (n x m): F = diag {F1, '•',
F i ,'", F s } e R ( s x n )x( s x m ) , F i e R n x m ;
-
• блочно-диагональная матрица выходов динамической системы с блоками размера
( l x n ): C Y = diag { c ‘ ,'•', c y c y } e R ( s x l )x( s x n ) , c y e R l x n •
Блочно-диагональный оператор (1) включает нелинейные стационарные управляе- мые по Н.Н. Петрову [19] разностные операторы:
x k + 1 = H i ( x k ) + F i u k , y k = C y x k , x k 0 = x 0 '
n x m
Векторы и матрицы в (2) имеют вид x k + 1 e R n , y k e R l , u k e R m , F i e R‘ C y e R l x n , H i ( x k ) e R n '
Стабилизация программных движений большой динамической системы ...
Оператор стабилизации программных движений большой динамической системы с ограниченными векторами координат и управлений
Утверждение 1. Блочно-диагональный разностный оператор (2) определяет оператор вида
AZ k = b k , (3)
где векторы состояний-управлений для s нелинейных подсистем заданы равенствами Z k =[ z k ,..., z k ,..., z k ] , z k =[ x k +i| u k ] , A = diag { A i ,..., A i ,..., A s } , A i = [ E n x n |F i ]T , b k =[ b k ,..., b k ,..., b k ] T , b k = H ( x k ) .
Доказательство. Оператор (2) представлен векторно-матричным нелинейным уравнением
|
_ E n X n ... 0 |
... 0 I |
[ X1 ,1 x k + 1 |
" F ... 0 |
... 0 I |
1 1 |
||||
|
F = |
... ... ... ... ... 0 ... E n X n ... 0 |
X |
... x k + i |
......... 0 ... F i |
...... ... 0 |
X |
... u k |
||
|
... ... ... ... ... [ 0 ... 0 ... E n X n _ |
... [ x k + i J |
......... _ 0 ... 0 |
...... ... F s _ |
... [ u k ] |
|||||
|
’ H i ( x k ) ... |
0. |
.. 0 I |
|||||||
|
= = |
... ... 0 ... |
... . H ( x k ) |
.. ... .. 0 |
■ |
|||||
|
... ... [ 0 ... |
... . 0. |
.. ... .. H s ( x k ) |
|||||||
Преобразования векторно-матричного уравнения определяют равенство
|
E n x n x k +1 |
- F 1 u k ' |
■ H, ( x k) ... |
|
|
... E n X n x k + 1 |
- Fu iki |
= |
H i ( x k ) |
|
... E n X n x k + 1 |
- F S u k J |
... h s ( x k ) |
После выделения обобщенных векторов фазовых координат и управлений zk = I xk+1 uk I левая нелинейная часть оператора принимает вид
[ E n х n l- F i ]
x k + 1 u 1 k
,...,
[ E n . n HF ] ’“
...
u k
[ E n X n |- F s ]
T xk+1
u k _
H 1 ( x k )
...
H( x k)
H S ( x k )
Выполнив замену переменных и выделив блочно-диагональную матрицу Â и блочный вектор состояний-управлений Z k, можно получить равенство
AZk = b k, где матрица A = diag{A1,...,A;-,...,As}, Ai =[Enxn|FiJT, bk =^bk,...,bk ,...,bkJ , bk = H ( x k )’ Z k =[z k ’...’z k ’...’z k J ’ z k = [xk+11 uk J ■
Утверждение 1 доказано.
Оператор (3) определяет условие-равенство в задаче стабилизации положения равновесия или стабилизации программных движений [20] большой динамической системы. Постановка указанных задач имеет вид: вычислить обобщенный вектор «состояний-управлений» евклидова конечномерного пространства R s×(n+m)
z k = arg min { ф ( Z k ) = | |Z k 1 2 | A Z k = b k , [ Z k — C k ] T [ Z k — C k J^ r 2 } e R s4n + m ) , (4) где C k =[ C 1 k ,..., C ik ,—, C sk J T — блочный вектор допустимых программных движений фазовых координат и управлений, C ik = [ C x k | C u k J e R n + m , r e R .
Счетное число решений задач конечномерного математического программирования (4) определено проекционным оператором, синтезированным в [21]:
Z k ( ° 1 , ° 2 , 0 ) = 0 Z k ( ° 1 ) + ( E - 0 ) Z k ( ° 2 ) ,
Zk (°j) = P+bk + °P0Ck, J = 1,2, где Z k =[ X k+1 |U k ]T, aik = (bk )T (p; )T Cik - (bk )T (P+ )T P+bk + Cik^bk + CTkPC - CTkCik + r2, gik = C kPTCik , °1 k = diag ° >•••> °ik >•••> °sk}, °2 k = diag {° 2 k >•••> °2 k >•••> ° 2k},
° k = 1 - fi kadgi , ° 2k = 1 + 4 kkgSi ’ ё = diag { в 1 ,... A ,..., в s } , J’ + = diag { P 1 + ,...,P+,..., P s +} ,
P i+ = A T ( A i A T ) - 1 , p1 0 = diag { P 10 ,..., P i 0,..., P f } , P° = E „ - A T ( A i -A T ) " * A f , 0 e [ 0;1 ] .
Вектор «состояний-управлений» (5) позволяет синтезировать оператор стабилизации программных движений большой динамической системы с ограниченными векторами координат состояний и управлений
X k + 1 = H ( X k ) + Y FU k ( X k , ° 1 , ° 2 , 0 ) • (6)
В (6) вектор локально допустимого управления имеет вид
Uk = T„Zk = T„ (0 P+bk + °1P0Ck + (E - 0) (P+bk + °2 P0Ck)), где T„ = diag{TU,...,T T„s}, T =[0иxn|EиxиJT – блочно-диагональная матрица, «фильтрующая» векторы управлений uik i-х подсистем.
Диагональная матрица параметров обратной связи
Y = diag {/1,..., Yi,:; Ys}, где γi – параметр обратной связи подсистемы с номером i, вычисляемый на основе принципа сжимающих отображений [21] как
Стабилизация программных движений большой динамической системы ...
н<(нНт1ЛН+^^
4MdHM/Hc-i2)4h4x^^^^^
Выполнение неравенства (7) является достаточным условием устойчивости подсистемы в операторе (6).
Вычислительный эксперимент
В качестве примера рассмотрено электроэнергетическое объединение, состоящее из трех электроэнергетических систем, подключенных к шине бесконечной мощности линиями электропередач (см. Рисунок 1).
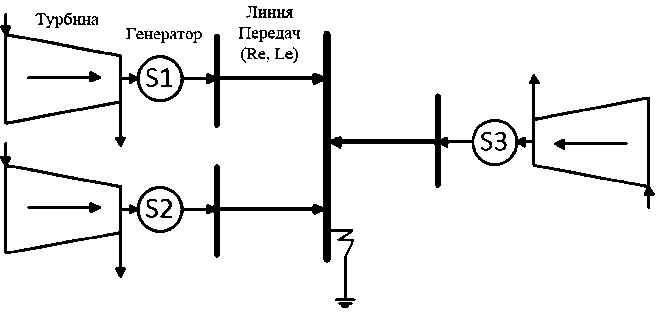
Рисунок 1. Структура электроэнергетического объединения Источник: схема выполнена автором.
Электромеханические процессы в i -й электроэнергетической системе описываются уравнениями турбины
2J№ dai
~7~ = TMxi - Tei - Dai, = ®r pi dtdt
Уравнения линии передачи, связывающей i-ю электроэнергетическую систему и шину бесконечной мощности, имеют вид vdl = 0,06idl + 0,011idi -0,011aliql + 10cos(p); vdl = 0,06 iqi + 0,011iq 1 + 0,011a idl + 10sin (p).
Электромагнитные процессы в электроэнергетическом объединении описывает блоч- но-диагональный оператор
Для вычисления параметров, входящих в блочно-диагональный оператор (10) векто- ров и матриц, использованы технические данные синхронных турбогенераторов ТВВ-320-2 (S1 и S2) и ТВВ-500-2 (S3) [22]:
|
"- 3,05 i 1,2 + 9,56 ® i ],2 dq |
- 0,22 i f 2 |
- 2,8 i rd2 - 5,78 . q2 |
|
|
6,18<'Л 2 - 1,95 i 1,2 dq |
+ 3,7.2 + 3,7. d 2 -5,99 i r q 2 |
||
|
A 1,2 ( x 1,2 ) = |
- 0,98 1,2 + 3,M 2" dq |
-1,92 i J2 + 5,32 i r d 2 - 1,85 ® i rq2 |
|
|
- 3,59 1;2 + 11,35 ® i 1,2 + 1,55 i 1;2 dqf |
- 10 i rd 2 - 6,79. q2 |
||
|
8,64.. - 2,73 iq’2 |
+ 5,18 ® ]’2 |
+ 5,18 ® i rd 2 - 10 i rq2 |
|
A 3 ( x 3 ) =
- 3,59 i 3 d + 10,58 ® q - 0,08 i 3 - 1,03 i 3 d - 4,13 ® i 3 q - 6,78 . 3 - 2,3 i q + 2, 65 & i f + 2, 65.d - 2,44 i rq - 1,39 i d + 4, 09. - 1,58 i f + 3,61 i 3 d - 1, 6.q - 6,93 i d + 20,44 ® i q + 1,38 i 3 - 6,25 i 3 d - 7, 98.q - 14, 79. - 5,01 i q + 5, 78. + 5, 78 ® i^ - 6, 25i r q
B 1,2 =
|
- 5,8 |
0 |
0,22 " |
"- 4,1 |
0 |
0,08 ' |
|
|
0 |
- 3,7 |
0 |
0 |
- 2,6 |
0 |
|
|
- 1,9 |
0 |
1,9 |
, B 3 = |
- 1,6 |
0 |
1,6 |
|
- 6,8 |
0 |
- 1,6 |
- 8 |
0 |
- 1,4 |
|
|
0 |
- 5,2 |
0 ] |
_ 0 |
- 5,8 |
0 ] |
Преобразование модели электроэнергетического объединения (8)–(10) к дискретной форме выполнено в среде динамического моделирования SimInTech [23].
Для динамической системы (6) компоненты диагональной матрицы «допустимости» θ: θ1, θ2 и θ3 подобраны экспериментально и равны 0,505. Параметр r = 1. Блочный вектор допустимых программных движений-управлений, задающий ограничения на векторы ко- ординат и управлений, задан в виде
C = [ C 1| C 2| C 3 ] T € R 30 , C 1 = [ C |C ] = [ 0,04 0,04 0,03 0 0|0 0 0,3 0 0 ] T e R 10 , C 2,3 = [ c 2,31 C 2 ,3 ] = [ 0,06 0,06 0,03 0 0|0 0 0,3 0 0 ] T e R 10 .
Графики изменения мощности турбин (8) учитывают динамику внешней мощности и нагрузку, определяемую процессами сети и первичным регулятором скорости вращения, показаны на Рисунке 2.
С учетом изменения нагрузки динамика относительных частот ωi электроэнергетических систем, входящих в электроэнергетическое объединение, приведена на Рисунке 3.
Динамика ограниченных вектором допустимых программных движений C x токов электроэнергетических систем, приведена на Рисунке 4.
Синтезированные локально допустимые управляющие воздействия u f, ограниченные вектором допустимых программных управлений С u, показаны на Рисунке 5.
Вычислительные эксперименты демонстрируют возможность стабилизации программных движений большой динамической системы с ограниченными координатами состояний и управлениями.
Стабилизация программных движений большой динамической системы ...
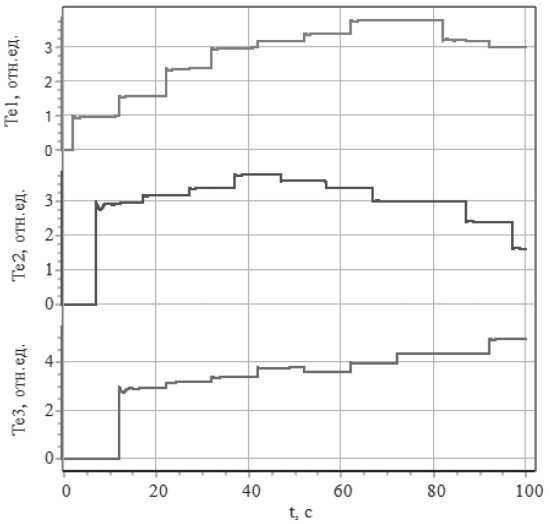
Рисунок 2. Графики изменения мощности турбин Источник: здесь и далее графики выполнены автором.
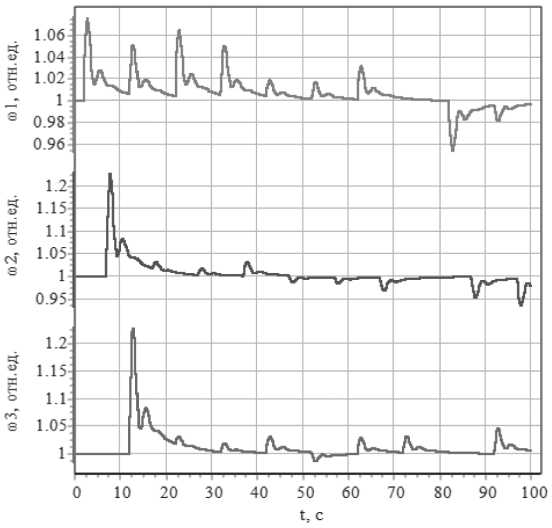
Рисунок 3. Динамика относительных частот ω i
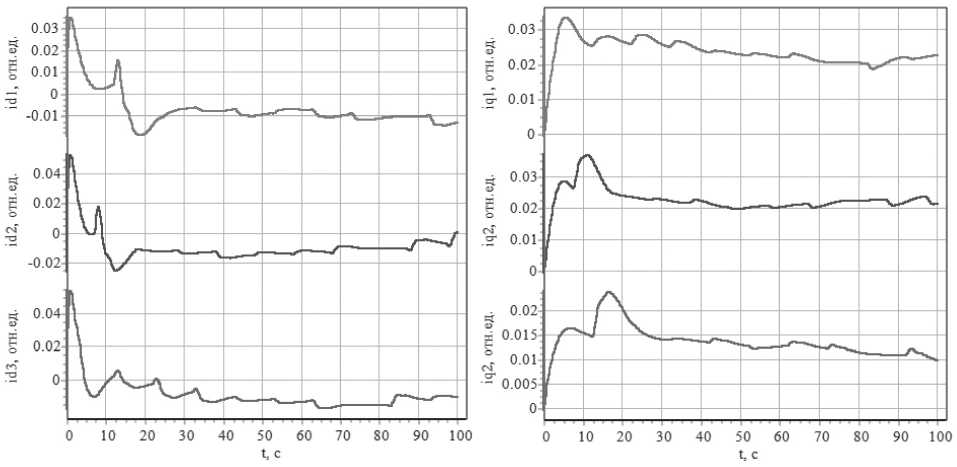
Рисунок 4. Динамика ограниченных токов электроэнергетических систем
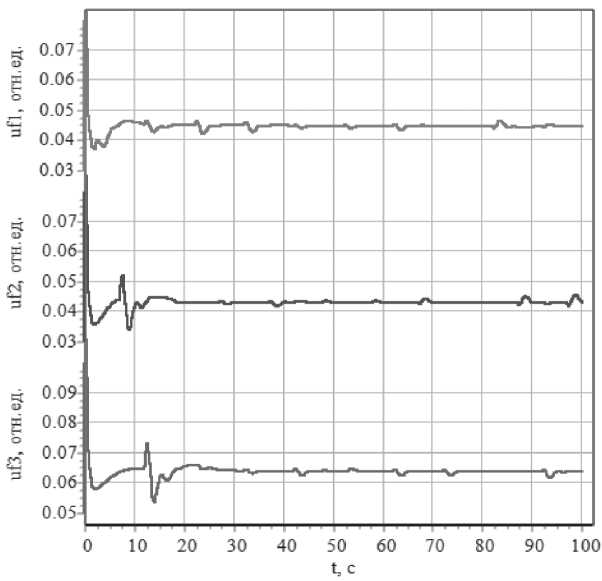
Рисунок 5. Ограниченные напряжения обмоток возбуждения u f
Выводы
В работе синтезирован проекционный оператор большой динамической системы, состоящей из s подсистем. Указанный оператор применим для решения задач стабилизации программных движений или положения равновесия с ограничениями-неравенствами на обобщенный вектор «состояний-управлений».
Вычислительный эксперимент продемонстрировал возможность применения проекционного оператора для стабилизации программных движений динамической системы с ограничениями на координаты состояний и управлений.
Стабилизация программных движений большой динамической системы ...
Список литературы Стабилизация программных движений большой динамической системы с ограничениями на векторы координат и управлений
- Зубов В.И. Теория оптимального управления судном и другими подвижными объектами. Ленинград: Судостроение, 1966. 352 c.
- He W., Mu X., Zhang L., Zou Y. Modeling and trajectory tracking control for flapping-wing micro aerial vehicles // IEEE /CAA Journal of Automatica Sinica. 2021. Vol. 8. No. 1. P. 148–156. DOI: 10.1109/JAS.2020.1003417
- Yu H., Liang X., Han J., Fang Y. Adaptive Trajectory Tracking Control for the Quadrotor Aerial Transportation System Landing a Payload onto the Mobile Platform // IEEE Transactions on Industrial Informatics. 2024. Vol. 20. No. 1. Pp. 23–37. DOI: 10.1109/TII.2023.3256374
- Алексеев А.А., Стуконог С.Н. Алгоритм построения оптимального судового пути с элементами систем программного движения судна на курсе // Транспортное дело России. 2022. № 2. С. 217–221. EDN LNALBA. DOI: 10.52375/20728689_2022_2_217
- Shen Z., Wang Y., Yu H., Guo C. Finite-time adaptive tracking control of marine vehicles with complex unknowns and input saturation // Ocean Engineering. 2020. Vol. 198. P. 106980. DOI: 10.1016/j.oceaneng.2020.106980
- Ye Z., Zhang D., Wu Z.-G. Adaptive event-based tracking control of unmanned marine vehicle systems with DoS attack // Journal of the Franklin Institute. 2021. Vol. 358. No. 3. P. 1915–1939. DOI: 10.1016/j.jfranklin.2020.12.026
- Воробьев Е.И., Михеев А.В., Моргуненко К.О. Построение программных движений механизмов относительного манипулирования с тремя степенями свободы // Проблемы машиностроения и надежности машин. 2019. № 6. C. 42–48. EDN VYYRHB. DOI: 10.1134/S0235711919060105
- Голубев А.Е. Стабилизация программных движений механических систем с учетом ограничений // Известия РАН. Теория и системы управления. 2023. № 4. C. 153–167. EDN OCLSAO. DOI: 10.31857/S0002338823040054
- Мещанов А.С., Бикмурзин А.М. Стабилизация программной посадки летательных аппаратов без шасси на подвижную платформу в атмосфере при неопределенных возмещениях. Ч. 1 // Вестник технологического университета. 2020. Т. 23. № 12. C. 109–117. EDN KOZLIY.
- Golubev A., Kovtanyuk A., Lampe R. Modeling of Cerebral Blood Flow Autoregulation Using Mathematical Control Theory // Mathematics. 2022. Vol. 10. No. 12. P. 2060. DOI: 10.3390/math10122060
- Sachan K., Padhi R. Lyapunov function based output-constrained control of nonlinear Euler – Lagrange systems // 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV). IEEE , Singapore, November 18–21, 2018. P. 686–691. DOI: 10.1109/ICARCV.2018.8581068
- Wang X., Xu J., Lv M., Zhang L., Zhao Z. Barrier Lyapunov function-based fixed-time FTC for highorder non-linear systems with predefined tracking accuracy // Nonlinear Dynamics. 2022. Vol. 110. No. 1. P. 381–394. DOI: 10.1007/s11071-022-07627-9
- Голубев А.Е. Построение программных движений механических систем с учетом ограничений при помощи многочленов третьего порядка // Известия РАН. Теория и системы управления. 2021. № 2. C. 126–137. EDN RROB ZP. DOI: 10.31857/S0002338820060049
- Aleksandrova O.V., Kozik A.A. Minimax optimization of stabilization parameters during the programmed flight // Moscow University Mechanics Bulletin. 2019. Vol. 74. P. 55–59. DOI: 10.3103/S0027133019030014
- Андреев А.С., Колегова Л.В. ПИД-регуляторы с запаздыванием в задаче о стабилизации программных движений роботов-манипуляторов // Журнал Средневолжского математического общества. 2022. Т. 24. № 3. С. 267–279. EDN LHVELJ. DOI: 10.15507/2079-6900.24.202203.267-279
- Козлов В.Н. Проекционный метод синтеза ограниченных оптимальных управлений динамических систем энергетики: монография. СПб.: Политех-Пресс, 2019. 161 c. DOI: 10.18720/SPBPU /2/i19-277
- Kozlov V.N., Efremov A.A. Operators of Bounded Locally Optimal Controls for Dynamic Systems // Arseniev D., Overmeyer L., Kälviäinen H., Katalinić B. (Eds) Cyber-Physical Systems and Control. CPS &C 2019. Lecture Notes in Networks and Systems. Vol. 95. Springer, Cham, 2020. P. 140–145. DOI: 10.1007/978-3-030-34983-7_14
- Kozlov V.N., Efremov A.A. Projection-operator optimization of controls of dynamic objects // Journal of Physics: Conference Series. 2021. Vol. 1864. No. 1. 13th Multiconference on Control Problems (MCCP 2020). Saint Petersburg, Russia, October 6–8, 2020. DOI: 10.1088/1742-6596/1864/1/012076
- Петров Н.Н. Об управляемости автономных систем // Дифференциальные уравнения. 1968. Т. 4. № 4. С. 606–617. EDN TVGG JN.
- Ефремов А.А., Козлов В.Н. Метод синтеза локально допустимых ограниченных управлений для стабилизации программных движений динамических объектов // Информационно-управляющие системы. 2023. № 4. C. 47–55. EDN DYULZH. DOI: 10.31799/1684-8853-2023-4-47-55
- Ефремов А.А., Козлов В.Н. Достаточные условия устойчивости локально-допустимой динамической системы с ограничениями на фазовые координаты и управления // Информационно-управляющие системы. 2023. № 6. C. 26–34. EDN UFBFDT. DOI: 10.31799/1684-8853-2023-6-57-65
- Неклепаев Б.Н. Электрическая часть электростанций и подстанций. 2-е изд. М.: Энергоатомиздат, 1986. 640 c.
- Скворцов Л.М. Численное решение обыкновенных дифференциальных и дифференциально-алгебраических уравнений. М.: ДМК Пресс, 2023. 236 c. ISBN 978-5-93700-143-6.
