Статические предельные характеристики асинхронного электропривода при частотном векторном управлении

Автор: Однокопылов Иван Георгиевич, Дементьев Юрий Николаевич, Крохта Юрий Владимирович, Ари Абдулла Р. рахим , Удут Леонид Степанович, Умурзакова Анара Даукеновна
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 4 т.18, 2018 года.
Бесплатный доступ
Актуальность исследований обусловлена широким применением частотно-управляемого асинхронного электропривода на базе асинхронного двигателя с короткозамкнутым ротором (АД) в наиболее востребованных в промышленности системах регулируемого электропривода общепромышленных механизмов. Целью исследований является анализ расчетных предельных статических характеристик, соответствующих либо номинальному значению напряжения АД, либо максимальному значению выходного напряжения инвертора преобразователя частоты (ПЧ) при заданном значении напряжения питающей сети для различных систем управления трехфазным инвертором, позволяющих оценить возможность получения требуемых скоростей при заданном моменте статической нагрузки в частотно-регулируемом асинхронном электроприводе с векторным управлением. Новизна исследований состоит в использовании предельной статической характеристики, формируемой функциональным преобразователем задания потокосцепления ротора разомкнутой по скорости системы ПЧ - АД при максимальном напряжении инвертора для выбора скорости начала ослабления потока АД в зависимости от его электромагнитного момента для достижения рабочего режима электропривода. Методы исследования, описанные в статье, основаны на использовании теории электропривода, электрических машин, методов математического и имитационного моделирования с помощью современных программных пакетов и компьютерных средств. В результате исследований установлено, что при недостаточном выходном напряжении инвертора ПЧ в асинхронном электроприводе с частотным векторным управлением формирование требуемых значений потока АД и его момента обеспечивается уменьшением его угловой скорости за счет уменьшения выходной частоты ПЧ. Причем начальную скорость ослабления потока АД следует выбирать в зависимости от фактического значения электромагнитного момента АД, используя для этого предельную статическую характеристику разомкнутой по скорости системы ПЧ - АД. Доказано, что в системах векторного частотного управления асинхронным электроприводом с выбором скорости начала ослабления потока АД в зависимости от электромагнитного момента АД имеется возможность поддержания оптимального значения потокосцепления АД в установившихся режимах его работы, позволяющая обеспечить больший момент при номинальном токе АД в установившемся режиме. Для уменьшения тока, потребляемого АД, и исключения его теплового перегрева при больших нагрузках следует задавать номинальное значение потокосцепления, а при малых нагрузках уменьшать значение задания потокосцепления.
Асинхронный двигатель, частотное управление, векторное управление, трехфазный инвертор, предельные характеристики
Короткий адрес: https://sciup.org/147232701
IDR: 147232701 | УДК: 621.313.062.4:621.314.632 | DOI: 10.14529/power180412
Static limiting characteristics of induction motor drive with frequency vector control
The paper describes the research considered relevant due to the wide-scale usage of frequency controlled asynchronous electric drive based on squirrel-cage induction motor (IM) in the most popular regulated electric drive industrial mechanism systems. The research aims to analyze estimated limiting static characteristics, which correspond either to IM voltage nominal value or to the maximum value of invertor output voltage of frequency controller (FC) on set supply voltage value for various control systems of three-phase invertor. These characteristics allow estimating the possibility to generate the required velocities on set static load torque in frequency controlled asynchronous electric drive with vector control. The research novelty involves using the limiting static characteristic formed by functional converter of rotor flux setting in the velocity open loop FC - IM system with maximum inverter voltage to select the velocity of IM flux weakening depending on its electromagnetic torque for reaching electric drive operating mode. The research methods, used in the paper, are based on employing the electric drive theory, electric machines theory, mathematical and simulation modeling methods with modern software. The research outcomes establish that with the insufficient output FC inverter voltage in an asynchronous electric drive with frequency vector control, the generation of the required IM flux and torque values is due to the reduction of its angular velocity by reducing the output frequency of the FC. Moreover, the initial rate of IM flux weakening should be selected depending on the actual value of the IM electromagnetic torque, using the limiting static characteristic of the open loop FC-IM system. The paper proves that the vector frequency control systems of an asynchronous electric drive with the velocity selection of the IM flux weakening depending on the IM electromagnetic torque feature a possibility to maintain the optimum IM flux value in steady-state mode, allowing for the higher value of IM torque at the IM rated current. To reduce the current used by IM and to exclude its overheating at high loads, the nominal value of the flux linkage should be set, and for lower loads, the value of the flux linkage specification should be reduced.
Текст научной статьи Статические предельные характеристики асинхронного электропривода при частотном векторном управлении
В системах регулируемого электропривода, применяющихся в настоящее время в промышленности и работающих в основном в продолжительных статических режимах с постоянным либо медленно изменяющимся моментом нагрузки, наибольшее распространение получил электропривод переменного тока на базе асинхронного двигателя с короткозамкнутым ротором, потребляющий более половины всей вырабатываемой электроэнергии [1].
Широкое применение асинхронного двигателя с короткозамкнутым ротором (АД) в наиболее востребованных в промышленности системах ре- гулируемого электропривода (ЭП) можно объяснить его высокой надежностью, обусловленной отсутствием щеточно-коллекторного узла и постоянных магнитов, простотой конструкции, малыми габаритами и моментом инерции ротора, отсутствием коммутационных ограничений по скорости и току и т. д. Наибольшее распространение в практике построения систем автоматического управления (САУ) частотно-управляемого асинхронного электропривода, реализующих заданные статические показатели, на раннем этапе получил простейший пропорциональный закон управления амплитудой напряжения статора АД в функции его частоты [2]. Однако в [3] доказано, что при таком законе управления невозможно одновременно обеспечить удовлетворительные механические и энергетические характеристики ЭП в широком диапазоне изменений частоты вращения и нагрузки вследствие влияния активного сопротивления и индуктивности рассеяния статора АД.
В этой связи в дальнейшем был разработан более перспективный принцип частотного векторного управления асинхронным ЭП [4–7], позволяющий рассматривать АД как двухканальный объект (аналог двигателя постоянного тока с независимым возбуждением) в координатной системе, ориентированной по вектору потокосцеплений ротора. Векторное частотное управление асинхронными двигателями с короткозамкнутым ротором позволяет обеспечить независимое управление модулем вектора потокосцепления ротора и электромагнитным моментом. Благодаря этому в системах векторного управления появляется возможность реализовать двухзонное регулирование частоты вращения по аналогии с электроприводом постоянного тока.
В настоящее время особый интерес для исследования представляют предельные статические характеристики АД, соответствующие либо номинальному значению напряжения двигателя, либо максимальному значению выходного напряжения инвертора преобразователя частоты (ПЧ) при заданном значении напряжения питающей сети для различных систем управления трехфазным инвертором [8], позволяющие оценить возможность получения требуемых скоростей в зависимости от момента нагрузки в частотно-регулируемом электроприводе с векторным управлением.
Целью статьи является анализ расчетных предельных статических характеристик двигателя ω( M эм) и ω( I 1ф) в разомкнутой по координате q системе преобразователь частоты – асинхронный двигатель (ПЧ – АД) при заданном значении потокосцепления ротора, а также в замкнутой системе асинхронного электропривода (АЭП) с частотным векторным управлением с управляемым потоком.
Векторный метод частотного управления АД
Векторные системы частотного управления асинхронными двигателями реализуются на основе структурной схемы двухфазного двигателя во вращающейся системе координат d , q [5, 9–11]. В замкнутой системе векторного управления составляющая напряжения U 1 d поддерживает постоянство потокосцепления ротора V 2 d = const, а составляющая напряжения U 1 q обеспечивает равенство электромагнитного момента двигателя статическому моменту на валу M эм = M с + A M сдв в установившемся режиме работы.
Система автоматического управления асинхронного электропривода с частотным векторным управлением представляет собой две независимые, но взаимосвязанные системы регулирования: систему поддержания заданного значения потокосцепления ротора посредством тока Id и систему поддержания заданного значения скорости посредством момента (тока Iq ) двигателя. Система регулирования потокосцепления двигателя является вспомогательной и решает собственные задачи системы управления привода. Система регулирования скорости является главной в системе управления электропривода и обеспечивает соответствие его характеристик предъявляемым к нему требованиям. Естественно, что статические режимы работы электропривода как в разомкнутой, так и в замкнутой системе могут рассматриваться только при следующем допущении: система регулирования потока обеспечивает постоянство заданного значения потокосцепления ротора [5, 6, 12].
Если при неизменном напряжении питания асинхронного двигателя U 1ф = const предположить, что система регулирования по координате d поддерживает постоянство потокосцепления V 2 d ( 1 1 d ) = const, то выполнение условия M эм( 1 1 q ) = M эмзад будет зависеть не только от значения составляющей напряжения по координате q
U1 q = ^(2 ■ и!ф )2 - U2d , но и, в первую очередь, от значения угловой скорости вращения АД.
Таким образом, если при неизменном напряжении АД принять потокосцепление равным V 2d = V 2 d зад , то можно рассчитать статические характеристики двигателя to(Mэм) и ю(11ф) в ра- зомкнутой по координате q системе ПЧ – АД при заданном значении потокосцепления ротора.
Структурная схема АД в двухфазной вращающейся системе координат d , q для статиче- ского режима работы в асинхронном электроприводе по системе ПЧ – АД при частотном векторном управлении приведена на рис. 1.
Система уравнений, описывающая структурную схему рис. 1, может быть представлена в сле- дующем виде:
M эм
1 1 d =
-
3 Lm
- Г z р V
L 2
2 d ■ 1 1 q ;
m I 1 .
2 d -Ю эл1 !■“ ;
7 R 1э
1 1 q = U 1 q
-m.z z р V2 d шдв
L2
- Lm1
U 1 d + R 2 ■ -m 2 ■V i d +^ L i ■ 1 1 q -® эл1 ■ —
L R 1э
;
V
1э
V 2 d 1 1 d Lm ;
■
® эл1 z p ' ® дв + R 2 ■ T ,
L 2
I 1 q
V 2 d
.
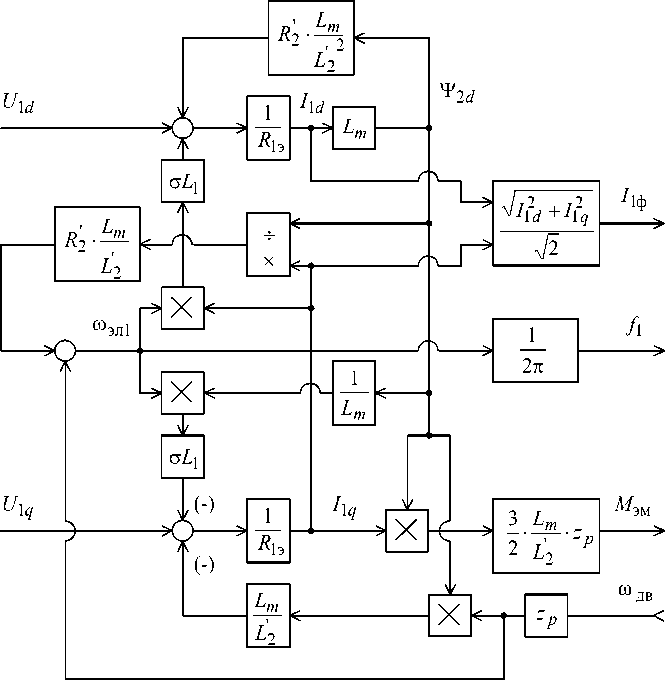
Рис. 1. Структурная схема АД в двухфазной вращающейся системе координат d , q для статического режима работы при векторном управлении
Как известно, при векторном управлении изменяется как модуль, так и пространственное положение вектора тока статора [10–13, 16]. Изменения вектора тока происходят таким образом, что проекция вектора тока статора I 1 АД на ось d ,
U 1 d = R a ■ 1 1 d
—
r 2 ■ Lm ■v
L
, 2
2н
—
—
'
G ■ L 1 ■ R 2 ■ L m ■ I 2
1 q
L 2 V 2н
— G^ L 1 ■ z p ■ 1 1 q -Ю дв ;
ориентированную по вектору потокосцепления ротора V 2 , остается неизменной и ее можно определить для первой зоны регулирования скорости вращения АД ( f 1 < f u) при потокосцеплении V 2 d = V 2н = const следующим образом
V,„
-
1 1 d = — = const. Lm
Составляющая I 1 q вектора тока статора I 1 , значение которой определяет момент двигателя, в установившемся режиме может быть найдена из следующего выражения
M эм
-
1 1 q з i
m
-
2 l 2 р 2н
.
Для обеспечения условий (1) и (2) необходимо поддерживать значения напряжений U1d и U1q в соответствии с равенствами:
U 1 q = I R 1э + . ^ ■ R 2 Г 1 1 q + V L 2 )
| Lm a- L ]
+ --Г +--■ zD ■ V2H ■ Юв .
p 2н дв
-
V L 2 L m )
Действующее значение фазного напряжения двигателя U1ф и его составляющие в двухфазной вращающейся системе координат d , q связаны следующим соотношением
( V2 .и 1ф ) 2 = U1 d + U 12 q . (5)
Приведенные уравнения (1)–(5) позволяют рассчитать статическую механическую ω дв ( M эм ) и электромеханическую ωдв( I 1ф) характеристику, а также зависимость угловой скорости от частоты питающей сети ω дв ( f 1 ) для АД в разомкнутой по координате q системе ПЧ – АД при неизменном значении напряжения питания двигателя U 1ф = const.
Кроме того, уравнения (1)–(5) позволяют определить требуемое максимальное значение напряжения U и.макс , обеспечивающее работу двигателя при заданных значениях максимальной скорости электропривода и максимального момента статической нагрузки.
Практический интерес представляет расчет предельных характеристик двигателя, соответствующих либо максимально допустимому значению напряжения двигателя U 1фн , либо максимальному значению выходного напряжения преобразователя U иф.макс при заданном значении напряжения питающей сети. В первом из этих случаев предполагается, что напряжение питающей сети может быть выбрано по допустимому значению U 1фмакс , во втором случае – напряжение сети задано и в свою очередь определяет максимальное значение выходного напряжения преобразователя U иф.макс .
Системы управления трехфазных инверторов ПЧ
В настоящее время системы управления трехфазных инверторов ПЧ реализуются с простой синусоидальной ШИМ, с синусоидальной ШИМ и третьей гармоникой в управляющих сигналах, а также с векторной ШИМ. Системы с векторной ШИМ управляются синусоидальными сигналами и имеют характеристики, аналогичные синусоидальной ШИМ с наложением третьей гармоники [8].
В электроприводах с частотным векторным управлением система автоматического управления электропривода прежде всего формирует и под- держивает постоянным заданный (в первой зоне номинальный) поток АД, а затем формирует требуемый момент [13– 17]. При недостаточном напряжении инвертора формирование требуемых значений потока АД и главным образом момента возможно изменением ЭДС вращения, т. е. за счет уменьшения угловой скорости АД, что в системе ПЧ – АД достигается уменьшением частоты вы- ходного напряжения инвертора:
Г _ ®эл1 _ 1 I „
f\ = ----- =--Z n ' ®7TR + R‘
-
1 р дв 2
-
2 -n 2-п I
- L m - 1 , Гц.
L 2 ^ 2 d J
Таким образом, при векторном управлении основополагающим фактором при формировании потока и требуемого момента АД является выходное напряжение инвертора, значение которого можно определить по его регулировочной характеристике (рис. 2) и которое ограничено на уровне U иф = U ифмакс .
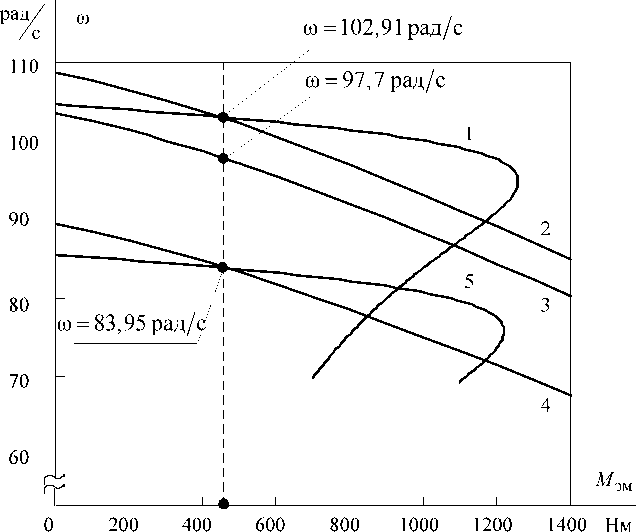
Как видно из рис. 2, ограничение напряжения инвертора сказывается только в верхней части диапазона регулирования скорости и практически не влияет на работу системы управления ПЧ в его нижней части. На рис. 3 для асинхронного электродвигателя АВ250S6 приведены естественная механическая характеристика 1 ( f 1 = 50 Гц и U 1 = U 1ф н = 220 В) и предельные механические характеристики 2, 3 и 4 разомкнутой системы ПЧ – АД соответственно для следующих трех случаев реализации системы управления трехфазным инвертором:
-
- U с = 400 В, синусоидальная ШИМ с наложенной третьей гармоникой и к = 1,1547 ( U и ф макс = = 220 В);
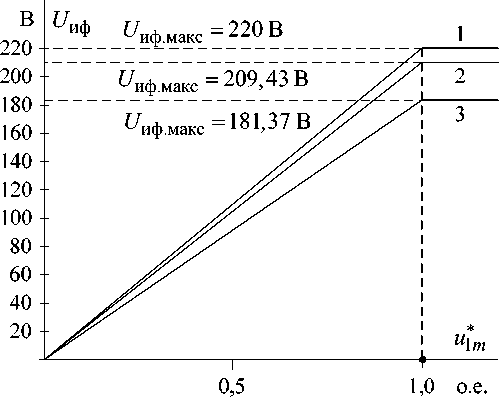
Рис. 2. Регулировочные характеристики инвертора напряжения: 1 и 2 – синусоидальная ШИМ с третьей гармоникой соответственно при U с = 400 В и U с = 380 В ; 3 – простая синусоидальная
ШИМ и U с = 380 В
M im h = 460 Нм эм.н
Рис. 3. Статические механические характеристики электродвигателя AB250S6: 1 – естественная характеристика при f 1н = 50 Гц и U 1ф н = 220 В ; 2, 3 и 4 – предельные характеристики разомкнутой системы ПЧ – АД при векторном управлении соответственно при U 1фмакс = 220 В , U 1фмакс = 209,3В и U 1фмакс = 181,37В ;
5 – искусственная характеристика при U 1ф = 181, 37 В и f 1 = 41, 22 Гц
-
- U с = 380 В, синусоидальная ШИМ с наложенной третьей гармоникой и к = 1,1547 ( U и ф макс = = 209,43 В);
-
- U с = 380 В, простая синусоидальная ШИМ ( U ифмакс = 181,37В). Характеристика 5 представляет собой статическую механическую характеристику двигателя, рассчитанную при U 1ф = 181,37 В и
- 181,37
f' = 50" 220 = 41,22 ГЦ" Следует заметить, что в приведенных расчетах величин напряжений инвертора не учтено падение напряжения в цепи инвертора и оно принято равным U1фмакс = Uифмакс .
Анализ характеристик, представленных на рис. 3, показывает, что при питании ПЧ от сети с номинальным напряжением Uс = 380 В ограниче- ние выходного напряжения инвертора приводит к существенному уменьшению диапазона регулирования скорости вращения АД в верхней части зоны регулирования при номинальном моменте нагрузки до значения скорости
® эпмакс
U ифмакс
<Ю двн ■—---- , рад/с,
U1фн и уменьшению перегрузочной способности электропривода на высоких скоростях.
На рис. 4 приведены статические механические характеристики замкнутой системы электропривода с частотным векторным управлением асинхронным двигателем АВ250S6, полученные при следующих условиях: U 1 ф макс = 209,43 В, максимальный допустимый ток I эпмакс = 170 А, соответствующий максимальному электромагнитному моменту двигателя M эммакс = 945 Н ■ м.
Как видно из рис. 4, предельная характеристика 2 разомкнутой системы ограничивает максимальную скорость АЭП в первой зоне регулирования в зависимости от момента нагрузки. Например, при моменте M эмн = 460 Н ■ м угловая скорость в точке 2 (т. 2) ограничена значением и2 = 97,7 рад/с, а при максимальном моменте двигателя M эм . макс = 945 Н ■ м , - значением скорости в точке 1 (т. 1) ю 2 = 89 рад/с.
Зная параметры АД и задаваясь значениями момента нагрузки и угловой скорости вращения двигателя, например M = M эмн и ю = ю двн, по выражениям (1)–(5) можно определить требуемые
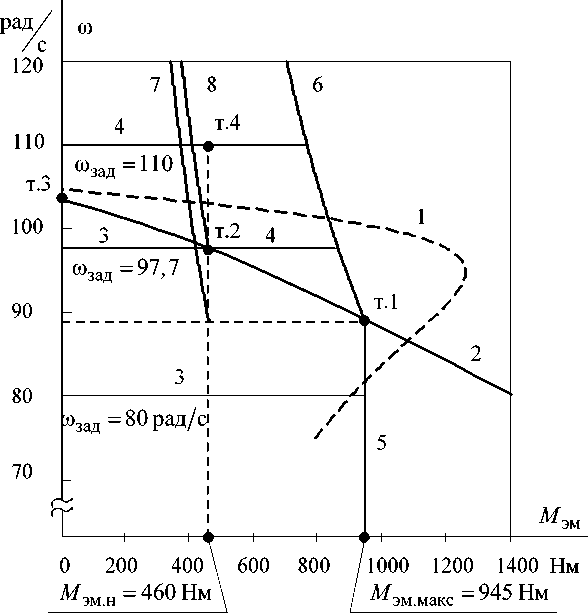
Рис. 4. Статические механические характеристики асинхронного электропривода с частотным векторным управлением: 1 – естественная характеристика двигателя АВ250S6; 2 – предельная характеристика разомкнутой системы при U 1фмакс = 209, 43 В ; 3, 4 – предельные характеристики замкнутой системы в первой и второй зонах; 5, 6 – характеристики кратковременно допустимой работы: 7, 8 – характеристики длительно допустимой работы
значения напряжений U1d и U1q для работы АД в заданной точке, а затем напряжения инвертора, звена постоянного тока и питающей сети по сле- дующим выражениям:
U иф макс
1,05 ■

+ u q
U d = V3■ V2 ■ U ифмакс ; U c = U 35, где коэффициент 1,05 учитывает падение напряжение в цепи инвертора.
Для асинхронного двигателя АВ250S6 выполнение указанных выше значений нагрузки и скорости может быть обеспечено инвертором с синусоидальной ШИМ с наложенной третьей гармоникой и k =1,1547 только при напряжении инвертора U ифмакс > U 1фн = 220В, что возможно при питании ПЧ от сети с напряжением U с > 420 В [18].
Требуемую максимальную угловую скорость асинхронного двигателя при частотном векторном управлении в электроприводе можно получить если:
-
- питать ПЧ от сети с напряжением U с > 420 В, ограничив максимальное значение напряжения
инвертора на уровне U И фмакс = 1,05 ■ U 1фн , поДДеР— живая значение коэффициента k в соответствии с выражением
V3 ■ V2-1,05 ■ и14н к =----------------1фн_ ■ 1,1547 < 1,1547; (6)
U d
– увеличить амплитуду управляющих сигналов u ^ m > 1 при напряжении сети U с < 420 В, позволяющую повысить примерно на 10 % максимальное значение выходного напряжения инвертора, но приводящую к существенному возрастанию в выходном сигнале инвертора (аналогично инвертору с п - коммутацией) высших нечетных (старше третьей) гармоник (пятой вплоть до 20 %, седьмой – до 14,3 %);
-
- при напряжении сети U с < 420 В выбрать двигатель с запасом по мощности и работать с постоянно ослабленным потоком или, что более целесообразно, реализовать двухзонное регулирование скорости с ослаблением потока только во второй зоне при скорости выше основной в соответствии с выражением
^ 2 d зад = ^ 2н ■ ^ нач , при Условии ® > ® на ч ,
to где ωнач – выбранное значение начальной скорости ослабления поля. Здесь под основной скоростью понимаются значения скорости, соответствующие предельной характеристике разомкнутой системы при фактических значениях момента нагрузки.
Из условия максимального быстродействия ослабление поля следует начинать при начальной скорости в точке (т. 1) ωнач = ω1 (см. рис. 4). Од- нако в этом случае в установившихся режимах работы АД будет иметь существенно ослабленный поток возбуждения. Так, например, при работе АД в точке (т. 2) с моментом Mэм = 460 Н ⋅ м и угловой скоростью ω2 = 97,7 рад/с установившееся значение потокосцепления будет равно
Ψ 2 d = ω 1 ⋅Ψ 2н = 0,9 ⋅Ψ 2н ω2
при требуемом значении
ω 2
2 d 2н 2н .
ω 2
Аналогично при работе АД в точке (т. 4) с угловой скоростью ω 4 = 110 рад/с установившееся значение потокосцепления будет равно
Ψ 2 d = ω 1 ⋅Ψ 2н = 0,73 ⋅Ψ 2н ω4
при требуемом значении:
Ψ 2 d = ω 2 ⋅Ψ 2н = 0,89 ⋅Ψ 2н . ω4
Из вышеизложенного следует, что значение начальной скорости ослабления поля необходимо выбирать по фактическому значению электромагнитного момента двигателя и изменять ее в соот- ветствии с изменениями момента. Таким образом, начальная скорость ослабления потока АД является функцией электромагнитного момента
ω нач = f ( M эм , U 1ф макс )
и представляет собой предельную характеристику при фактическом значении напряжения U 1фмакс , например характеристика 2 на рис. 3 при U 1фмакс = 220В.
При изменениях напряжения сети и нагрузки АД (потребляемого двигателем тока) значение начальной скорости ослабления потока АД дополнительно будет зависеть от фактического напряжения на звене постоянного тока Ud и определяется следующей зависимостью
ω нач = f ( M эм , U ифмакс = 1,05 ⋅ U 1фн ) ×
× U d ,
3 ⋅ 2 ⋅1,05⋅U1фн где Ud ≤420 В.
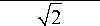
Структурная схема блока формирования задания на входе контура регулирования потокосцепления ротора в системе векторного частотного управления двухзонного асинхронного электропривода приведена на рис. 5.
Функциональный преобразователь ФП формирует предельную характеристику разомкнутой системы АЭП при максимальном напряжении инвертора U ифмакс = 1,05 ⋅ U 1фн :
ω∗ нач = f ( M эм , U ифмакс = 1,05 ⋅ U 1фн ). (7)
Для обеспечения работоспособности устройства управления потокосцеплением необходимо выполнить следующие условия:
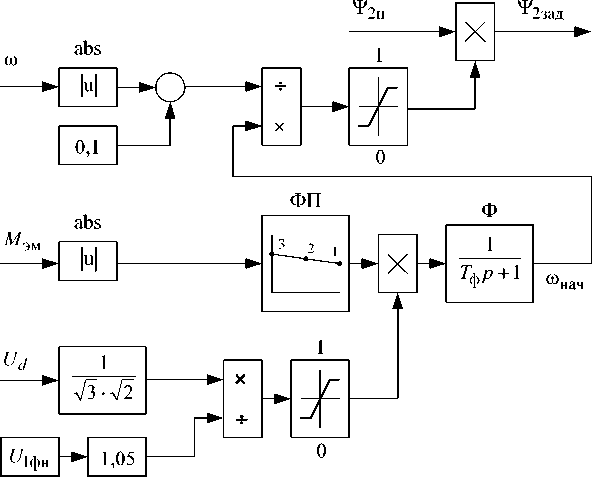
Рис. 5. Структурная схема блока формирования задания потокосцепления ротора на входе контура регулирования
-
– при задании характеристики (7) функционального преобразователя должно выполняться условие ω∗ нач < ω нач при общем значении момента;
-
– в канале регулирования потокосцепления необходим инерционный фильтр Ф с постоянной времени T ф .
Подбором постоянной времени фильтра Tф может быть получен желаемый характер переходных процессов во второй зоне регулирования скорости. Выбором меньших значений начальной скорости ослабления поля ω∗нач на характеристике функционального преобразователя в области малых моментов можно добиться работы АД в области малых нагрузок с ослабленным потоком и минимальным значением потребляемого тока.
На рис. 6 представлены зависимости потребляемого асинхронным двигателем AB250S6 тока при работе с заданной скоростью ω зад = 0,9 ⋅ ω ном и следующих значениях задания потокосцепления ротора:
характеристика 1 – Ψ2зад = Ψ2н , характеристика 2 – Ψ2зад = 0,8 ⋅ Ψ2н , характеристика 3 – Ψ2зад = 0,6⋅Ψ2н .
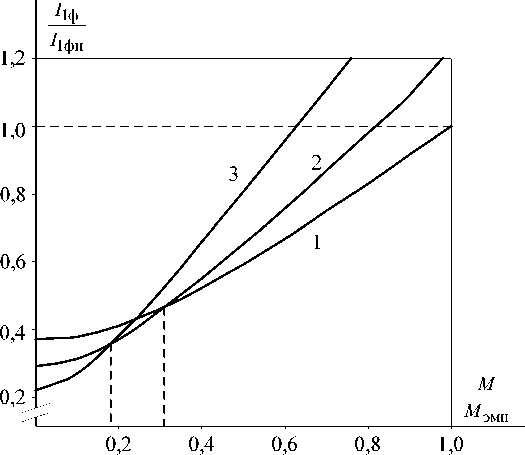
Рис. 6. Зависимости тока, потребляемого АД, от момента нагрузки при:
1 — ^ 2 =^ 2н ; 2 - V = 0,8 .^ 2н ; 3 - V 2 = 0,6 -Т 2н
Рис. 7. Графики изменения потокосцепления V 2( t ) при отработке задания ю зад = 110 рад/с в двухзонном электроприводе: 1 - ю нач = f ( M эм) ; 2 - ®нач = const
Для уменьшения тока, потребляемого АД, и исключения его теплового перегрева при больших нагрузках следует задавать номинальное значение потокосцепления. При малых нагрузках, наоборот, целесообразно уменьшать значение задания потокосцепления.
На рис. 7 приведены графики изменения потокосцепления при отработке задания ю зад = 110 рад/с в двухзонном частотно-управляемом электроприводе.
Системы АЭП с постоянным значением скорости начала ослабления поля ю нач = ю 1 характеризуются несколько большим быстродействием во второй зоне регулирования, однако поток двигателя в установившемся режиме оказывается излишне ослабленным (характеристика 2 на рис. 7). Основным достоинством систем с выбором скорости начала ослабления поля в зависимости от электромагнитного момента двигателя ю нач = f ( M эм ) является обеспечение оптимального значения потокосцепления в установившихся режимах работы электропривода (характеристика 1 на рис. 7). Это уменьшает потребляемый двигателем ток от инвертора и позволяет обеспечить больший момент при номинальном токе двигателя в установившемся режиме (характеристика 8 на рис. 4).
Динамические характеристики, представленные в [18] АЭП с частотно-векторным управлением, подтверждают более высокую эффективность работы АЭП с управляемым потоком АД. Причем АЭП с постоянным значением скорости начала ослабления потока АД ю нач = ю 1 характеризуются несколько большим быстродействием во второй зоне регулирования.
Выводы
-
1. Установлено, что при недостаточном выходном напряжении инвертора ПЧ формирование требуемых значений потока АД и его момента в асинхронном электроприводе с частотным векторным управлением обеспечивается уменьшением его угловой скорости за счет уменьшения выходной частоты f 1 преобразователя частоты.
-
2. Выявлено, что при недостаточном напряжении сети целесообразным для системы ПЧ – АД является реализация двухзонного регулирования скорости АД для обеспечения условия ю эпмакс > ю двн , причем начальную скорость ослабления потока АД следует выбирать в зависимости от фактического значения электромагнитного момента АД, используя для этого предельную статическую характеристику разомкнутой по скорости системы ПЧ – АД.
-
3. Доказано, что основным достоинством систем управления АЭП с выбором скорости начала ослабления потока АД в зависимости от электромагнитного момента двигателя ю нач = f ( M эм) яв-
- ляется возможность поддержания оптимального значения потокосцепления в установившихся режимах работы АЭП, позволяющая обеспечить больший момент при номинальном токе АД в установившемся режиме.
-
4. Для уменьшения тока, потребляемого АД, и исключения его теплового перегрева при больших нагрузках следует задавать номинальное значение потокосцепления, а при малых нагрузках уменьшать значение задания потокосцепления.
Список литературы Статические предельные характеристики асинхронного электропривода при частотном векторном управлении
- Булгаков, А.А. Частотное управление асинхронными двигателями / А.А. Булгаков. - М.: Энергоиздат, 1982. - 216 с.
- Garces, L.J. Parameter adaptation for the speed-controlled static ac drive with a squirrel-cage induction motor / L.J. Garces // IEEE Trans. Ind. Appl. - 1980. - Vol. IA-16. - P. 173-178. DOI: 10.1109/TIA.1980.4503768
- Сандлер, А.С. Автоматическое частотное управление асинхронными двигателями / А.С. Сандлер, Р.С. Сарбатов. - М.: Энергия, 1974. - 328 с.
- Виноградов, А.Б. Адаптивная система векторного управления асинхронным электроприводом / А.Б. Виноградов, В.Л. Чистосердов, А.Н. Сибирцев // Электротехника. - 2003. - № 7. - С. 7-17.
- Blaschke, F. Das Prinzip der feldorientierung die Grundlage fur die Transvektor - Regelung von Drehfeldmaschinen / F. Blaschke // Siemens Zeitschrift. - 1971. - Bd. 45, H. 10. - S. 757-760.
- Рудаков, В.В Асинхронные электроприводы с векторным управлением / В.В. Рудаков, И.И. Столяров, В.А. Дартау. - Л.: Энергоатомиздат, Ленинград. отд-ние, 1987. - 136 с.
- Novotny, D.W. Vector control and dynamics of AC drives / D.W. Novotny, T.A. Lipo. - Oxford: Clarendon Press, 1996. - 440 p.
- Система управления с синусоидальной широтно-импульсной модуляцией трехфазного инвертора при частотном скалярном управлении асинхронным двигателем. / Ю.Н. Дементьев, К.Н. Негодин, Н.В. Кояин, Л.С. Удут. // Известия высших учебных заведений. Электромеханика. - 2016. - № 4. - С. 49-54.
- Копырин, В. С. Математическое моделирование асинхронного частотно-регулируемого электропривода в режиме рекуперации энергии торможения в питающую сеть / В.С. Копырин, А.А. Ткачук // Электротехника. - 2006. - № 1. - C. 37-44.
- DOI: 10.17213/0136-3360-2016-4-49-54
- Шрейнер, Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты / Р.Т. Шрейнер. - Екатеринбург: УРО РАН, 2000. - 654 с.
- Электропривод с устройством косвенного контроля выходных координат асинхронного двигателя / Ю.Н. Дементьев, В.И. Гончаров, К.Н. Негодин, А.Д. Умурзакова. // Вестник Южно-Уральского государственного университета. Серия «Энергетика». - 2017. - Т. 17, № 4. - С. 99-106.
- DOI: 10.14529/power170411
- Virtual-flux-based direct power control of three-phase PWM rectifiers / M. Malinowski, M.P. Kazmierkowski, S. Hansen et al. // IEEE Trans. on Industry Applications. - 2001. - Vol. 37, no. 4. - P. 1019-1026.
- DOI: 10.1109/28.936392
- Overview of Control and Grid Synchronization for Distributed Power Generation Systems / F. Blaabjerg, R. Teodorescu, M. Liserre, A.V. Timbus // IEEE Trans. on Ind. Electronics. - 2006. - Vol. 53, no. 5. - P. 1398-1409.
- DOI: 10.1109/TIE.2006.881997
- Veszprémi, K. Direct controls in voltage-source converters - generalizations and deep study / K. Veszprémi, I. Schmidt // Conference on Power Electronics and Motion Control, EPE-PEMC'2008. Proceedings on CD-ROM. - 2008. - P. 1826-1833.
- DOI: 10.1109/EPEPEMC.2008.4635527
- Saeidi, S. A novel algorithm for model predictive control of AC electrical drives / S. Saeidi, R. Kennel // Proc. EDPC. -2012. - P. 78-84.
- DOI: 10.1109/EDPC.2012.6425099
- Direct power control of PWM converters without power source - voltage sensors / Tishihiko Noguchi, Hiroaki Tomiki, Seiji Kondo and Isao Takahashi // IEEE Trans. on Industry Applications. - 1998. - Vol. 34, no. 3. - P. 473-479.
- DOI: 10.1109/28.673716
- Veszprémi, K. Optimizing the Dynamic Behavior of Direct Controls of Voltage-source Converters / K. Veszprémi // Electric Power Components and Systems. - 2009. - Vol. 37 (9). - P. 1014-103.
- DOI: 10.1080/15325000902918883
- Limiting static and dynamic characteristics of an induction motor under frequency vector control / I. Vajda, Yu.N. Dementyev, K.N. Negodin et al. // Acta Polytechnica Hungarica. - 2017. - Vol. 14, no. 6. - P. 7-27.
