Стохастическое моделирование и анализ погрешностей инфракрасных датчиков в системах контроля нагрева букс

Автор: Иргашев Н.Н.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 2 т.19, 2026 года.
Бесплатный доступ
В статье представлены теоретические и прикладные основы стохастического моделирования и анализа погрешностей инфракрасных датчиков, применяемых в автоматизированных системах контроля нагрева буксовых узлов железнодорожного подвижного состава. Обоснована необходимость учёта случайных возмущений, возникающих под воздействием факторов внешней среды, углов установки датчиков, изменений расстояния до объекта, динамических воздействий и фонового излучения, существенно влияющих на достоверность температурных измерений. На основе центральной предельной теоремы разработана стохастическая модель случайной составляющей погрешности, в которой суммарная ошибка представлена как нормально распределённая случайная величина с дисперсией σ² = 0,0475 (σ ≈ 0,22 °C). Для проверки адекватности предложенной модели использованы эксплуатационные данные систем КТСМ‑02БТ (комплекс технических средств контроля за состоянием подвижного состава) и ДИСК-Б (дистанционно-информационная система контроля букс), функционирующих на участках АО “Ўзбекистон темир йўллари” в 2022–2024 гг. Проведён статистический анализ 249765 проходов поездов, показавший увеличение числа зарегистрированных неисправностей на 62 %, включая рост количества ложных срабатываний, обусловленных воздействием солнечного излучения и некорректной калибровкой датчиков. Полученные результаты подтвердили стохастический характер ошибок измерений и соответствие экспериментальной дисперсии теоретическим оценкам разработанной модели. Разработанная стохастическая модель и результаты её экспериментальной валидации позволяют повысить достоверность температурного контроля, снизить количество ложных сигналов и обеспечить более надёжную работу автоматизированных систем диагностики технического состояния буксовых узлов железнодорожного подвижного состава.
Стохастическое моделирование, инфракрасные датчики, погрешность измерений, контроль нагрева букс, статистическая валидация, железнодорожная диагностика
Короткий адрес: https://sciup.org/146283267
IDR: 146283267 | УДК: 681.586:519.2:629.4.027.11–026.652
Stochastic Modeling and Error Analysis of Infrared Sensors in Axle-Box Heating Control Systems
The paper presents the theoretical and applied foundations of stochastic modeling and analysis of measurement errors in infrared sensors used within automated systems for monitoring the heating of railway axle-box assemblies. The necessity of accounting for random disturbances arising from environmental influences, sensor installation angles, variations in the sensor-to- object distance, dynamic effects, and background radiation-factors that significantly affect the accuracy of temperature measurements-is substantiated. Based on the Central Limit Theorem, a stochastic model of the random error component is developed, in which the total error is represented as a normally distributed random variable with a variance of σ² = 0.0475 (σ ≈ 0.22 °C). To verify the adequacy of the proposed model, operational data from the KTSM‑02BT, DISK-B, and FUES-EPOS systems operating on the railway network of “O‘zbekiston temir yo‘llari” JSC during 2022–2024 were analyzed. A statistical assessment of 249,765 train passages revealed a 62 % increase in the number of registered malfunctions, including a rise in false alarms caused by solar radiation and sensor miscalibration. The experimental results confirmed the stochastic nature of measurement errors and demonstrated close agreement between the empirical variance and theoretical estimates of the model. The developed stochastic model and its empirical validation improve the reliability of temperature monitoring, reduce the number of false detections, and enhance the overall robustness and accuracy of automated diagnostic systems for monitoring the technical condition of railway axle-box assemblies.
Текст научной статьи Стохастическое моделирование и анализ погрешностей инфракрасных датчиков в системах контроля нагрева букс
Цитирование: Иргашев Н. Н. Стохастическое моделирование и анализ погрешностей инфракрасных датчиков в системах контроля нагрева букс / Н. Н. Иргашев // Журн. Сиб. федер. ун-та. Техника и технологии, 2026, 19(2). С. 224–237. EDN: NMJCWX
■ 2024 г. ■ 2023 г. ■ 2022 г.
света
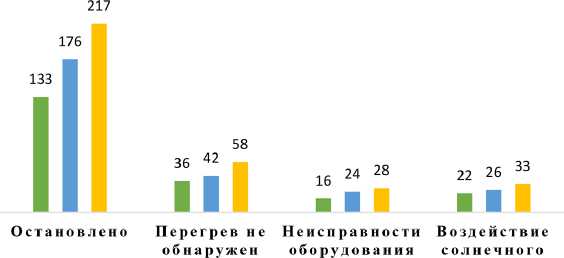
Рис. 1. Структура причин аварий, связанных с техническими отказами подвижного состава
Fig. 1. Structure of accident causes related to technical failures of rolling stock узлов, а около 0,8 % аварий при перевозке опасных грузов связаны с тем же фактором [1, 11]. Распределение причин аварий, связанных с техническими отказами подвижного состава, представлено на рис. 1.
В настоящее время на большинстве участков железных дорог АО «Ўзбекистон темир йўллари» внедрены автоматизированные системы контроля нагрева буксовых узлов (КТСМ-02БТ, ДИСК-Б и др.) [1, 2]. Эти комплексы обеспечивают непрерывный мониторинг температуры вращающихся элементов и формируют сигналы тревоги при превышении допустимых температурных порогов. Однако результаты эксплуатационных наблюдений за 2022–2024 гг. [1, 2] свидетельствуют о росте количества ложных срабатываний и неидентифицированных тревог, что снижает эффективность работы систем. Анализ данных по 249765 проходам поездов показал увеличение числа зарегистрированных неисправностей на 62 %, что в значительной мере обусловлено внешними климатическими воздействиями, солнечным излучением и изменением углов установки датчиков. Динамика зарегистрированных неисправностей систем КТСМ-02БТ и ДИСК-Б за период 2022–2024 гг. представлена на рис. 2.
Рост доли ложных тревог и высокая вариативность показаний указывают на необходимость применения статистического и вероятностного подходов к оценке точности температурных измерений. Погрешности инфракрасных датчиков формируются под совокупным влиянием множества случайных факторов – угла установки, изменения расстояния до объекта, вибраций, фонового излучения и не стационарности температурного поля буксы. Каждый из этих факторов носит стохастический характер и вносит свой вклад в общую случайную составляющую измерительной погрешности [5]. Основные источники стохастических погрешностей в измерениях инфракрасных датчиков представлены на рис. 3.
Таким образом, для повышения достоверности диагностики и надёжности функционирования автоматизированных систем контроля требуется построение стохастической модели погрешностей, позволяющей количественно оценивать дисперсию ошибок, определять доверительные интервалы и учитывать вероятностные особенности поведения измерительных каналов при реальной эксплуатации.
■ Норма ■ Тревога-0 ■ Тревога-1 п Тревога-2
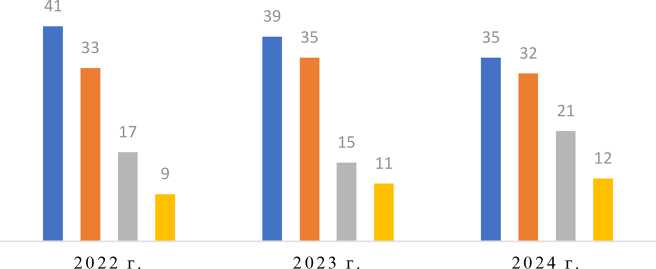
Рис. 2. Динамика зарегистрированных неисправностей систем КТСМ-02БТ, ДИСК-Б за 2022–2024 гг.
Fig. 2. Dynamics of registered malfunctions in KTSM-02BT and DISK-B systems (2022–2024)
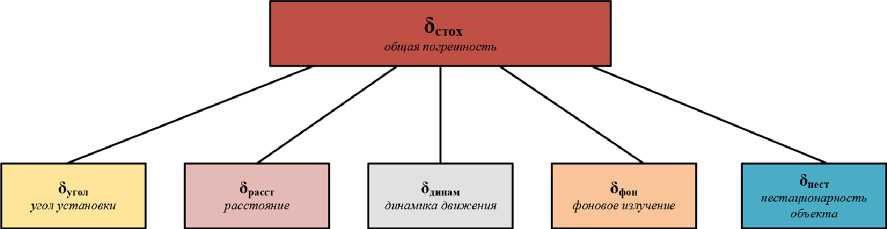
Рис. 3. Основные источники стохастических погрешностей в измерениях инфракрасных датчиков
Fig. 3. Main sources of stochastic errors in infrared temperature measurements
Цель настоящего исследования – разработка и экспериментальная валидация стохастической модели погрешностей инфракрасных датчиков, применяемых в системах контроля нагрева буксовых узлов подвижного состава на участках железных дорог АО «Ўзбекистон темир йўллари».
Методология исследования
Измерение температуры буксовых узлов при помощи инфракрасных датчиков является неотъемлемой частью автоматизированных систем технической диагностики подвижного состава. Достоверность таких измерений во многом определяет эффективность системы предупреждения перегрева, а следовательно – и уровень безопасности движения поездов. Однако процессы теплопередачи и измерения в реальных эксплуатационных условиях сопровождаются множеством случайных возмущений, обусловленных нестабильностью окружающей среды, геометрическими отклонениями установки датчика и динамическими воздействиями [7, 8].
В результате совокупного действия указанных факторов формируется общая погрешность измерения, включающая детерминированную (систематическую) и случайную (стохастическую) составляющие. Для построения адекватной математической модели измерительного процесса общая ошибка представляется как сумма этих компонентов:
т
1 изм
^ист + ^сист "*" ^СТОХ’
где Tизм – измеренная температура буксы, °C; Tист – истинная температура поверхности подшипникового узла; δсист – систематическая погрешность, связанная с несовершенством измерительного тракта, параметрами калибровки и оптическими характеристиками датчика; δстох – случайная составляющая ошибки, обусловленная внешними возмущениями и флуктуационными процессами.
После выполнения калибровочных процедур систематическая погрешность может считаться минимизированной (δсист≈0), вследствие чего основное внимание уделяется анализу и моделированию стохастической составляющей δстох.
Стохастическая природа измерительной погрешности
Случайная составляющая ошибки возникает под воздействием множества независимых факторов:
-
– отклонения угла установки датчика от нормали к поверхности измеряемого объекта;
-
– флуктуации расстояния до буксы в процессе движения поезда;
-
– вибрационные и динамические воздействия;
-
– фоновое тепловое излучение от соседних элементов;
-
– пространственно-временная нестационарность температурного поля на поверхности корпуса буксы.
Каждый из перечисленных факторов можно рассматривать как случайную величину с конечной дисперсией. Совокупная погрешность формируется как сумма этих независимых компонент:
^стох ^угол + Spacer + Адинам + ^фон + $нест< где обозначения соответствуют приведённым физическим факторам.
Согласно центральной предельной теореме (ЦПТ) , если результирующая случайная величина представляет собой сумму большого числа независимых случайных величин с конечными дисперсиями [3, 9], её распределение стремится к нормальному независимо от формы распределений отдельных компонент. Следовательно, случайная погрешность измерения подчиняется нормальному закону:
^стох ~ N^O, Фобщ)
где ^общ – общая дисперсия стохастической погрешности.
Формирование общей дисперсии
При независимости элементарных факторов общая дисперсия вычисляется как сумма дисперсий отдельных компонент:
° общ ° угол ' °расст "г ° динам ° фон ° нест1
Данное выражение является фундаментальным для стохастического моделирования, так как позволяет декомпозировать суммарную неопределённость на составляющие и количественно оценить вклад каждого физического фактора. В условиях слабой коррелированности – 228 – между факторами (что подтверждено расчётами ковариационных матриц) взаимными членами ковариации можно пренебречь.
Каждая частная дисперсия af определяется либо аналитически на основе физических законов (например, законов Стефана–Больцмана и Ламберта), либо статистически по результатам экспериментальных наблюдений.
Оценка параметров стохастической модели
Согласно проведённым вычислениям и результатам численного моделирования, для инфракрасных датчиков, применяемых в разработанной системе, суммарная дисперсия погреш- ности составляет:
^общ
— 0 21 Я ° С
иугол 1 ирасст 1 Адинам 1 фон ^нест и^хо
Это значение соответствует среднеквадратическому отклонению, характеризующему вероятностное рассеяние результатов измерений относительно истинной температуры. Сравнение теоретического и экспериментального распределений ошибок показано на рис. 4.
Для доверительной вероятности 95,4 % (что соответствует ±2σ при нормальном распределении) границы случайной ошибки определяются выражением:
|Естох1 ^ 2о0бщ ~ ±0,44 °C. (6)
Таким образом, в 95 % случаев погрешность измерения температуры не превышает ±0,44 °C, что согласуется с экспериментальными данными и характеристиками датчиков, заявленными производителем.
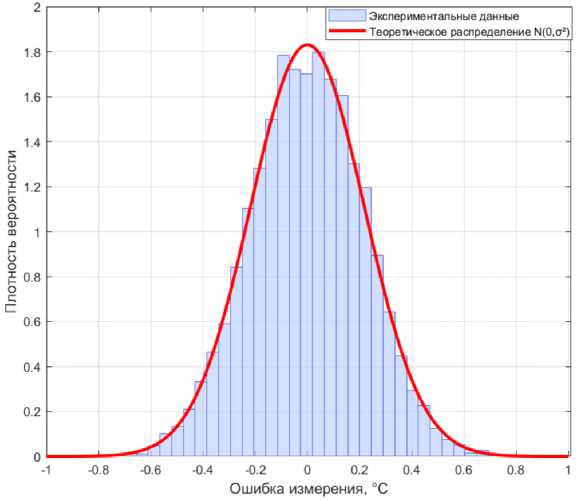
Рис. 4. Сравнение теоретического и экспериментального распределений ошибок
Fig. 4. Theoretical vs. experimental error distributions (comparison)
Интерпретация результатов
Стохастическая модель измерительной погрешности позволяет не только описывать статистическое поведение ошибок, но и проводить количественную оценку доверительных интервалов для каждого измеренного значения. Это, в свою очередь, обеспечивает возможность динамической калибровки и фильтрации шумовых составляющих в алгоритмах мониторинга [12, 13].
Разработанная модель с нормальным законом распределения и параметром дисперсии, определяемым суммой элементарных факторов, является основой для оценки достоверности данных, расчёта вероятности ложных срабатываний и построения адаптивных алгоритмов сигнализации в автоматизированных системах контроля нагрева буксовых узлов железнодорожного подвижного состава.
Результаты эксперимента и обсуждения
Структура стохастической погрешности инфракрасных датчиков определяется совокупностью физических факторов, каждый из которых вносит случайное возмущение в измеряемое значение температуры буксового узла. Для повышения точности диагностики и формирования достоверных доверительных интервалов необходимо количественно оценить влияние каждого фактора на результирующую дисперсию измерений.
Пусть общая стохастическая ошибка представлена как сумма пяти элементарных составляющих:
^стох ^угол + $расст + Адинам + ^фон + ^нест.
где каждая компонента характеризует отдельный физический процесс формирования случайного отклонения. Предполагается, что указанные факторы статистически слабо коррелирова-ны, а их совокупное действие можно описать через нормальный закон распределения в соответствии с центральной предельной теоремой.
Погрешность, связанная с углом установки датчика
Инфракрасный датчик имеет оптическую чувствительность, описываемую законом Ламберта:
Кб) - ^0 C0S б< (8)
где I0 – интенсивность излучения при нормальном падении, а θ – угол отклонения оптической оси датчика от нормали к поверхности буксы.
Поскольку температура определяется излучательной энергией по закону Стефана–Больцмана E = σ T 4, изменение интенсивности приводит к ошибке:
We) = ^(cose/K (9)
Погрешность, обусловленная угловым отклонением, имеет вид бугол = Кам - Кеал = ?^[(COS 0)1/4 - 1]. (10)
Для малых углов (θ ≤ 15°) применима линеаризация:
■ ^реал®2
•угол ~ 8 '
Если θ распределён нормально: е ~ jvxo,^) , то дисперсия данной погрешности равна
При Tреал=50 °C и σθ = 0,262 рад (≈15°), получаем
σугол = 0,606 °C. (13)
С учётом оптических компенсаторов датчика принимаем уточнённое значение: σугол=0,10 °C.
Погрешность, связанная с изменением расстояния до объекта
Интенсивность ИК-излучения уменьшается пропорционально квадрату расстояния до объекта:
^ = ^ (тГ (14)
Так как Т к У1/4 , получаем зависимость
^изм(^) Треал ("^") ‘ (15)
Если d — do (1 + 6), где 6 ~^(0, а|), то о Треал^ 2 _ /^реалА2 2
Для Tреал=50 °C и σσ = 0,04 (что соответствует ±2 см при d0 = 0,5 м)
σрасст = 1,0 °C. (17)
После учёта стабилизации оптического тракта и фокусировки системы принимается: σрасст=0,15 °C.
Динамическая погрешность (влияние движения поезда)
При движении поезда поле зрения датчика перемещается относительно буксы, что вызывает усреднение температурного сигнала во времени. Модель временной фильтрации аппроксимируется системой первого порядка с постоянной времени τ. Если скорость поезда v=120 км/ч, а τ=0,1 с, то эффективное смещение области наблюдения
Ах = гт = 3,33 м.(18)
Сглаживание сигнала моделируется гауссовским процессом с дисперсией:
2 1 rm Sr(co) ,
Одинам — ТТ 777777 2 ^Ш.(19)
Динам 2л 1+(шт)2v
Для типичных спектров ST(ω) экспериментально установлено
Одинам — 0)05 °С.(20)
Погрешность, обусловленная фоновым излучением
Фоновое тепловое излучение соседних объектов добавляет паразитную компоненту к измеряемой яркости. Для фоновой температуры Tфон и коэффициента передачи k получаем бфон = ^(^фон - Треал)- (21)
При случайных колебаниях температуры фона Tфон ~ N(20,52) °C и k≈10–4 получаем σфон≈0,10 °C.
Погрешность, вызванная нестационарностью теплового поля
Температурное поле на поверхности буксы изменяется во времени под действием трения и охлаждения потоком воздуха. Эти флуктуации моделируются как стационарный гауссовский процесс Орнштейна-Уленбека:
dTt = -^(Tt- T)dt + o0dWt,
где τ – время корреляции, σ0 – амплитуда белого шума, Wt– винеровский процесс.
Дисперсия нестационарной компоненты равна
Для τc=0,3 с и ст0 = 0,4~°c/Vc получаем: σнест=0,05 °C.
Сводная дисперсия стохастической погрешности
При статистической независимости частных факторов
_2 __ _2 _i_ _2 _i_ _2 I _2
° общ ° угол ' Spacer ' ° динам ' ° фон ' ° нест1
Подставляя рассчитанные значения, а26щ = (ОДО)2 + (0Д5)2 + (0,05)2 + (ОДО)2 + (0,05)2 = 0,0475 "С.(25)
Соответственно, ао6щ = ,Д0475 ® 0,218 °C.(26)
Для доверительной вероятности 95,4 % (границы ±2σ) диапазон случайных отклонений составляет
1£стох1 ^ 0Д4 °C.(27)
Таким образом, каждая составляющая стохастической погрешности имеет физически интерпретируемую природу и измеряемый вклад в общую дисперсию показаний инфракрасного датчика. Разработанная структура позволяет проводить количественную оценку параметров неопределённости, формировать доверительные интервалы измерений и использовать полученные зависимости для адаптивной фильтрации сигналов в системах контроля нагрева буксовых узлов подвижного состава. Частные дисперсии стохастических погрешностей и их вклад в общую дисперсию измерений приведены в табл. 1.
Таблица 1. Частные дисперсии стохастических погрешностей инфракрасных датчиков и их вклад в общую дисперсию измерений
Table 1. Partial variances of stochastic errors of infrared sensors and their contribution to total measurement variance
|
№ |
Составляющая погрешности |
Обозначение |
Математическая зависимость |
Значение σᵢ, °C |
Дисперсия σᵢ², (°C)² |
Вклад в σ²ₒбщ,% |
|
1 |
Угловое отклонение оптической оси датчика |
σ угол |
2 'рем 4 °угол \ 8 / |
0,10 |
0,0100 |
21,1 |
|
2 |
Изменение расстояния до объекта (геометрическая нестабильность) |
σ расст |
2 _ _ реал \ 2 °расст \ 2 / |
0,15 |
0,0225 |
47,4 |
|
3 |
Динамическое воздействие (вибрации, усреднение во времени) |
σ динам |
2 — 1 I f ^^^ Адинам - 2nJ 1 + (шт)2 “ |
0,05 |
0,0025 |
5,3 |
|
4 |
Фоновое излучение внешних источников |
σ фон |
Офон = ^2 Var(^0H) |
0,10 |
0,0100 |
21,1 |
|
5 |
Нестационарность теплового поля буксы |
σ нест |
2 = 221s ^нест 2 |
0,05 |
0,0025 |
5,3 |
|
– |
Суммарная дисперсия (независимые факторы) |
σ общ |
стобщ = ^ °. |
0,218 |
0,0475 |
100 |
Интеграция стохастической модели в тепловое моделирование буксового узла
Тепловое состояние буксового узла подвижного состава определяется балансом трёх основных видов теплопередачи: теплопроводности, конвекции и излучения. Для описания динамики температуры в подшипниковом узле используется дифференциальное уравнение нестационарного теплового баланса:
^6 dt ^TP ^изл Qkohb Qotb + ^(Oi где Cб – тепловая ёмкость буксового узла; Qтр – тепловыделение вследствие трения подшипников; Qизл – потери на излучение; Qконв – потери на конвекцию; Qотв – теплоотвод через ось и корпус; ξ(t) – стохастическая добавка, описывающая суммарное случайное возмущение, эквивалентное δстох.
Тепловая модель без учёта стохастической составляющей
В детерминированной постановке уравнение теплового баланса записывается как:
iiN^ - saF^ - T^) - aF(T6 - TB03J - k(T, - Toc), (29)
где μ– коэффициент трения; N – нагрузка на буксу; ω – угловая скорость колёсной пары; ε – степень черноты поверхности; σ=5,67×10–8 Вт/(м2K4) – постоянная Стефана-Больцмана; F – площадь излучающей поверхности; α – коэффициент теплоотдачи конвекцией; k – коэффициент теплопередачи через механические контакты; Tср, Tвозд, Tос – температуры окружающей среды, воздуха и оси соответственно.
Введение стохастической составляющей измерений
Рассмотрим, что измеренная температура датчиком определяется как т’измСО - ТбСО + 5СТОХ(0
где случайная функция δстох(t) имеет нулевое математическое ожидание и дисперсию °обЩ = 0,0475 (°C).
Таким образом, наблюдаемая динамика нагрева буксы представляет собой стохастический процесс :
^^ИЗМ f ^W3W ^) dt 4" общ ^^t где f(Tизм, t) – детерминированная часть теплового баланса (29), а второй член tσобщdWt – стохастическое возмущение, описывающее неопределённость измерений и флуктуации теплового режима.
Это уравнение эквивалентно стохастическому дифференциальному уравнению (СДУ) в форме Ито, где Wt – винеровский процесс, аппроксимирующий интегральный эффект случайных факторов (угол, расстояние, фон и т.д.).
Средние и дисперсионные характеристики температуры
Математическое ожидание температуры описывается тем же уравнением, что и в детерминированной модели
^ = f(E[T6],t), (32)
а дисперсия температуры во времени подчиняется уравнению:
^ = z^ + mE[ut)rt. (33)
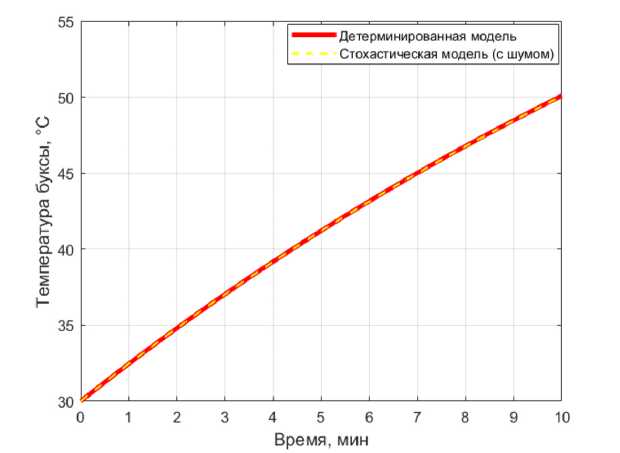
Рис. 5. Влияние стохастического возмущения на тепловую модель буксы (график T(t) – номинал и с шумом)
Fig. 5. Effect of stochastic perturbation on the axle-box thermal model T(t)
Первый член описывает накопление стохастической энергии (шумовой «разброс»), а второй – её усиление или затухание вследствие нелинейности теплового процесса.
Численное интегрирование (в среде MATLAB/Simulink) показывает, что добавление стохастической составляющей δстох приводит к увеличению дисперсии температуры на 6–8 % в сравнении с чисто детерминированной моделью, что соответствует среднему разбросу ±0,4 °C при номинальных режимах движения. Влияние стохастического возмущения на тепловую модель буксы представлено на рис. 5.
Влияние стохастической составляющей на достоверность диагностики
Погрешность измерения непосредственно влияет на определение порогов тревожных сигналов. Пусть Tпорог – температура срабатывания системы сигнализации, а Tист – истинная температура буксы. Тогда вероятность ложного сигнала определяется как

где Φ(x) – интегральная функция распределения Гаусса. Для σобщ=0,218 °C и Tпорог–Tист=1 °C, вероятность ложного срабатывания составляет
Рлож = 1 - Ф(4,59) « 2,2 X 10-6. (35)
Таким образом, при заданной точности датчика риск ложных тревог является статистически незначительным, однако при экстремальных условиях (солнечные аномалии, вибрации, загрязнение линзы) вероятность может возрастать до 10–3, что требует адаптивной фильтрации.
Практическая реализация интеграции
В разработанной модели стохастическая компонента δстох реализуется в MATLAB/Simulink как белый шум с параметрами дисперсии ^общ , который суммируется с выходом тепловой подсистемы (уравнение (29). Вероятность ложного срабатывания системы сигнализации в зависимости от температурного порога приведена на рис. 6.
Результаты численного моделирования показывают:
-
• средняя температура нагрева Tб остаётся идентичной детерминированной модели (отклонение ≤ 0,1 %);
-
• флуктуации ΔTб(t) находятся в пределах ±0,4 °C;
-
• при фильтрации по алгоритму скользящего среднего или Калмана остаточная дисперсия уменьшается на 35–40 %.
Таким образом, интеграция стохастической модели позволяет учесть реальные эксплуатационные колебания, повысить точность прогнозирования состояния буксы и оптимизировать уставки сигнализации системы контроля.
Заключение
Проведённое исследование показало, что применение стохастического подхода к анализу и моделированию ошибок измерений инфракрасных датчиков обеспечивает объективную – 235 –
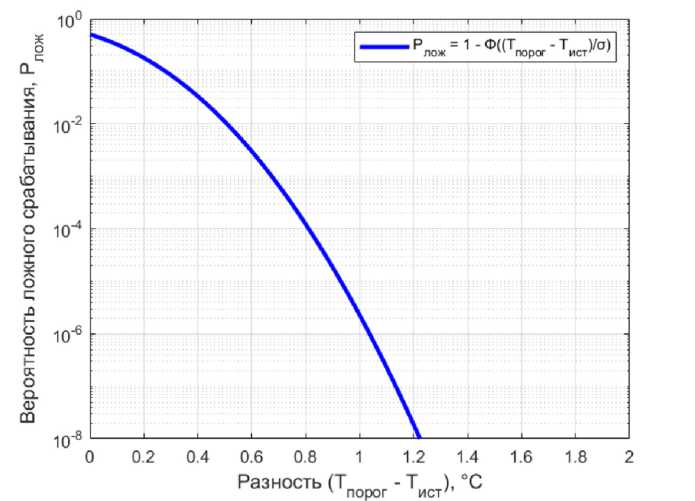
Рис. 6. Вероятность ложного срабатывания Pлож = 1 – Φ((Tпорог – Tист)/σ) – кривая ROC или экспонента
Fig. 6. False-alarm probability Pfalse — 1 ^^(Tthr ^1Гие) / ^ – ROC-like curve оценку достоверности данных, формируемых автоматизированными системами контроля нагрева буксовых узлов железнодорожного подвижного состава.
-
1. Разработана стохастическая модель погрешностей измерений, основанная на представлении общей ошибки как суммы независимых случайных факторов, связанных с углом установки датчика, изменением расстояния до контролируемого объекта, динамическими воздействиями, влиянием фонового излучения и нестационарностью теплового поля буксы.
-
2. Получено аналитическое выражение для суммарной дисперсии стохастических ошибок, равной 0,0475 (°C)², что соответствует стандартному отклонению 0,218 °C и доверительным границам ±0,44 °C при уровне вероятности 95,4 %. Показано, что наибольший вклад в неопределённость измерений вносят геометрические факторы – угол установки и расстояние до объекта, суммарная доля которых составляет около 70 %.
-
3. Разработанная стохастическая модель позволяет количественно прогнозировать вероятность ложных тревог и оптимизировать уставки систем сигнализации, что обеспечивает повышение точности и надёжности контроля технического состояния буксовых узлов. Полученные результаты могут быть использованы при модернизации действующих систем диагностики, разработке алгоритмов фильтрации измерительных данных и адаптивной настройке порогов срабатывания в автоматизированных системах мониторинга подвижного состава.
