Стратегия управления движением танкера на перекрестии

Автор: Петров Сергей Олегович, Агарков Сергей Анатольевич
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Транспорт
Статья в выпуске: 1 т.18, 2015 года.
Бесплатный доступ
Представлена концепция инновационной стратегии управления движением танкера при выполнении им сложного маневрирования на нефтяном терминале, находящемся в открытом море.
Перекрестие, инновационный способ, управление движением танкера
Короткий адрес: https://sciup.org/14294772
IDR: 14294772 | УДК: 656.614.3.073.23
Strategy of management of tanker movement in the crosshair
The concept of the innovation strategy of management of tanker movement has been presented, the tanker being performed the difficult maneuvering at the oil terminal in the high seas.
Текст научной статьи Стратегия управления движением танкера на перекрестии
Экономическая эффективность освоения природных ресурсов на арктических шельфах северных регионов Российской Федерации связана с вопросами экологической безопасности при выполнении грузовых операций танкерами на нефтяных терминалах, находящихся на шельфе в открытом море. В процессе изучения данной проблемы разработан способ управления движением танкера, названный управлением на перекрестии.
2. Способ управления по отклонениям от перекрестия
Стратегия управления движением танкера на перекрестии может быть использована при подходе к терминалу, но поскольку основные временные затраты имеют место в период погрузки нефти, то будем рассматривать маневрирование танкера именно в течение этого временного интервала.
В данной стратегии определяющим элементом является прицельная точка, с которой связана прямоугольная система координат XOY . На диаметральной плоскости (ДП) судна выбраны две точки, которые максимально разнесены по длине: носовая ( F ), кормовая ( A ). Введем расстояния от точек F и A до координатных осей OX и OY : d xF , d xA , d yF , d yA (рис. 1). Далее будем пользоваться этими индексами для указания конкретной точки.
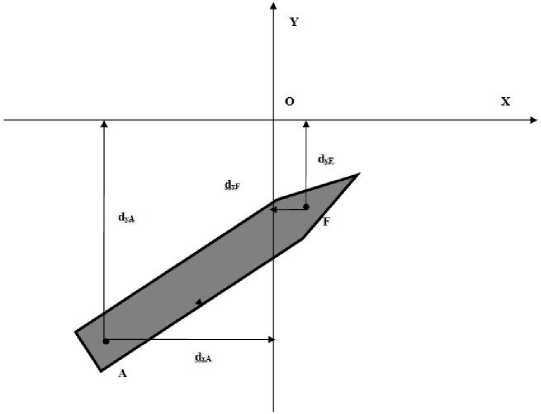
Рис. 1. Определение отклонений при управлении на перекрестии
Фактически эти расстояния показывают разность между соответствующими координатами (x или y) точек F или A и координатными осями. Они же являются координатами точек на носовой и кормовой частях корпуса судна в местной системе координат с центром в перекрестии и нужным направлением координатных осей, что определяет правило знаков указанных отклонений (Юдин, Пашенцев, 2012), например, dxF > 0, dyF < 0, dxA < 0, dyA < 0 (рис. 1).
Введенные расстояния играют решающую роль в управлении танкером при использовании стратегии управления на перекрестии. Совокупность отклонений d x определяет поворот танкера, совокупность отклонений d y - движение танкера в направлении ДП судна. Сумма ( d yF + d yA ) определяет движение танкера в направлении оси OY : если эта величина отрицательна, танкер должен двигаться передним ходом, в противном случае необходим задний ход. Интенсивность хода пропорциональна абсолютной величине указанной суммы. Разность ( dхF - dхА ) определяет поворот танкера: если она положительна, судно следует поворачивать против часовой стрелки, в противном случае поворот должен происходить по часовой стрелке. Интенсивность поворота пропорциональна абсолютной величине этой разности. Пропорциональность не обязательно прямая - это могут быть более сложные, нелинейные зависимости. При этом танкер должен иметь соответствующие органы управления, обеспечивающие его продольное (главный двигатель) и поперечное (два подруливающих устройства) движение. Другой силовой комбинацией может быть поворотная колонка в корме танкера и носовое подруливающее устройство.
Рассмотрим силовую комбинацию движителей, включающую главный двигатель и два (носовое и кормовое) подруливающие устройства (НПУ и КПУ). Законы управления можно записать в аналитической форме:
Т е = ( d yF + d yA ) = р ( d yF + d yA ), M z ( d хF — d хА ) = m ( d хF — d хA ), (1)
где Те - упор винта главного движителя; M z - вращающий момент, создаваемый двумя подруливающими устройствами; коэффициенты p и m подлежат подбору опытным путем или в процессе компьютерного моделирования маневров танкера.
Если первое уравнение из пары (1) определяет непосредственно упор винта, то с вращающим моментом дело обстоит сложнее. Он формируется под действием упоров подруливающих движителей, но их работа одновременно порождает и поперечную силу. Следовательно, необходимо удовлетворить одновременно двум условиям: обеспечить равновесие и поперечных сил, и моментов согласно уравнениям равновесия:
Y Yk Ya Yw Yr Ypr Yb Ytr Y Ypr ,
Mz Mk Ma Mw Mr Mpr Mb Mtr Mz Mpr .
Пусть ПУ танкера развивают поперечные упоры Ypr 1 и Ypr 2, а продольные координаты их размещения на танкере равны x 1 и x 2. Равновесие сохранится, т.е. выполнятся условия:
Y pr 1 + Y pr 2 + Y = 0, x 1 Y pr 1 + x 2 Y pr 2 + M z = 0.
Тогда при воздействии всех поперечных усилий и моментов, указанных в уравнениях (2), танкер останется в равновесии. Это утверждение справедливо для статического равновесия. При моделировании учитывается динамика танкера, включаются в уравнения равновесия члены, определяющие ускорение судна, т.е. действующие на него динамические силы и моменты.
Разрешая статические уравнения равновесия в форме (3) относительно упоров ПУ Ypr 1 и Ypr 2, получим их значения:
MzYx 2 pr 1 xx
M z Yx 1
pr 2
xx
3. Формирование управляющего сигналапо отклонениям от координатной системы перекрестия
При использовании различных способов управления необходимо регулировать значение управляемых параметров. В нашем случае такими параметрами являются тяга винта главного движителя и тяги подруливающих устройств. Однако согласно физическим законам ни один управляемый параметр, в том числе и тяга, не может изменяться мгновенно. Существует реальная скорость изменения параметра, и управлять можно именно этой скоростью.
Другими проблемами при выборе закона управления являются:
-
- быстрота реакции управляемого объекта;
-
- перерегулирование, т.е. величина максимального отклонения управляемого параметра от установочного значения.
Физическая сущность задачи управления - преодоление инерции большой массы танкера и окружающей его воды - обусловливает тот факт, что эффективное решение одной из указанных проблем способствует снижению качества решения другой проблемы. Так, быстрая реакция системы ведет к малым отклонениям, но приводит к частым воздействиям на регулятор. Наоборот, медленная реакция требует редкого регулирования, но приводит к большим отклонениям. Поэтому вырабатываются некоторые промежуточные решения, которые способствуют появлению необходимых по качеству показателей системы "управление – судно", т.е. в системе управления формируется некоторый сигнал sign, величина которого непосредственно связана отклонением управляемого параметра Δр от установочного значения. Эта связь может быть линейной или произвольно сложной
sign СΔр sign f(Δр).
После выработки управляющего сигнала скорость vp изменения управляемого параметра р выбирается согласно нелинейному закону, графическое изображение которого приведено на рис. 2. Если сигнал управления не превышает величины lim1, то скорость vp равна нулю, параметр р неизменен. Тем самым возникает зона нечувствительности управляющей системы – при малых отклонениях система не реагирует на такое отклонение. Когда сигнал управления превышает значение lim1, но не достигает значения lim2, происходит изменение параметра р со скоростью, пропорциональной управляющему сигналу:
sign lim vр vmax 1 при lim1 sign lim2 . (6)
lim lim
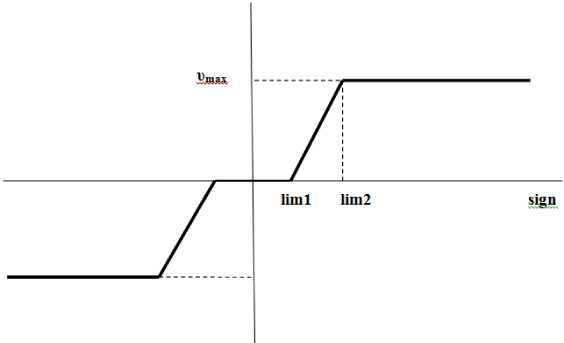
Рис. 2. Нелинейный закон управления скоростью изменения управляемого параметра (с зонами нечувствительности и насыщения)
Когда управляющий сигнал sign становится больше значения lim 2, то скорость изменения параметра р остается максимальной:
vрvр max при sign lim .
Возникает так называемая зона насыщения. При этом параметр р не должен превышать своего предельного значения, т.е. максимальной тяги регулируемого движителя.
При моделировании системы управления необходимым элементом является подбор параметров С [закон (4)] и lim 1 , lim 2 [закон (6)], которые будут существенно влиять на качество управления объектом.
Характерная стратегия управления строится на основе принципов управления по отклонениям. Данные принципы согласуются с патентными продуктами ( Юдин и др ., 2013), созданными с участием автора, и базируются на понятии прицельной линии (ПЛ), выбираемой в зависимости от задачи, которая ставится в процессе управления объектом.
Пусть прицельная линия выбрана и записано ее уравнение. Спутниковая система с дифференциальным сигналом (DGPS или ГЛОНАСС) определяет непрерывно с высокой точностью координаты двух точек судна F и A (на носовой и кормовой частях корпуса судна), значения координат которых позволяют непрерывно вычислять их поперечные смещения dхF и dхA от текущего положения ПЛ, т.е. расстояния этих точек до прицельной линии. Поперечное смещение рассматриваемой точки от ПЛ считается положительным, если она смещается вправо, и отрицательным, если она смещается влево (с ориентацией на нос судна).
Вычисленные поперечные смещения вырабатывают сигнал на изменение управляемого параметра р по следующему закону:
Δр kFdхF + kAdхA, где kF, kA – коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от прицельной линии, являющиеся положительными величинами, причем kF больше kA.
Данный способ хорошо зарекомендовал себя на уровне математического моделирования управления судном с помощью рулевого органа. Управляемым параметром в этом случае становится угол перекладки руля:
a = - k F d хF + k A d хA . (7)
Например, диаметральная плоскость 4 судна 1 (рис. 3) пересекает прицельную линию 2 под углом, величина которого определяется значениями поперечных смещений точки F ( dхF ) и точки A ( dхA ), при этом в соответствии с правилом знаков dхF > о , d хA < о . Тогда согласно закону управления (7) угол отклонения руля будет иметь отрицательное значение, т.е. руль будет переложен на левый борт и судно начнет вращение влево, что приведет к изменению dхF и dхA и в конечном итоге к выходу судна на прицельную линию и пересечению данной линии по инерции. Изменение отклонений при этом таково, что руль начнет перекладку на другой борт и процесс управления многократно повторится.
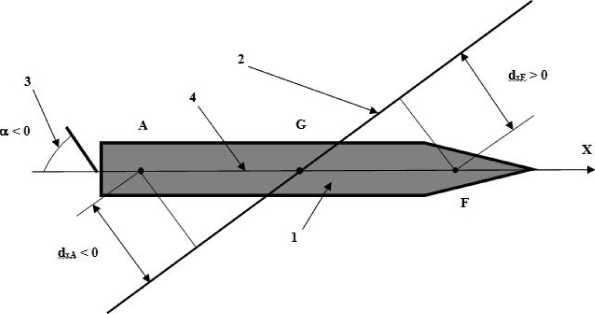
Рис. 3. Управление по отклонениям от ПЛ с помощью рулевого органа
Данная стратегия повторяется дважды при управлении на перекрестии. В этом случае выбираются две произвольные прицельные линии, измеряются пары отклонений от них; далее ПЛ служат для формирования стратегии управления объектом (танкером). В качестве двух ПЛ были выбраны перпендикулярные линии в виде системы координат XOY с центром O в выбранной точке, создающие перекрестие. Задачей управления является такое маневрирование объекта (танкера), чтобы его центр тяжести (ЦТ) (или иная заданная точка) находился внутри круга заданного радиуса, т.е. не удалялся бы от перекрестия на большую, чем установлено, величину. Радиус устанавливается определенным образом исходя из целей управления. Подобная задача маневрирования (например, буровых судов или платформ) носит название динамического позиционирования.
В нашем случае при маневрировании танкера на акватории нефтяного терминала во время выполнения грузовых операций по погрузке нефти и нефтепродуктов перекрестие не будет неподвижным. Координатная линия OY связывается с направлением швартового троса, линия OX ей перпендикулярна на определенном расстоянии от точки его крепления. Поскольку в процессе маневрирования направление троса и положение его конца будут меняться, прицельные координатные линии и перекрестие будут менять свое положение. Задача управления – следовать за перемещением этого перекрестия.
Управление (4) или (5) имеет определенные недостатки. Оно предполагает мгновенный переход параметра р в новое состояние, что невозможно. Более приближенным к реальным условиям является закон, при котором формируется скорость изменения параметра:
vр С Δ р .
При этом действует естественное ограничение на величину самого параметра. Она не должна превышать максимальной величины, заданной для конкретного параметра. Это означает, что параметр, достигший своего предельного значения, далее находится в данном состоянии до формирования нового сигнала (команды) на его изменение. В случае двух отклонений носовой и кормовой точек от некоторой прицельной линии сигнал имеет вид sign1 k1FdхF + k1AdхA.
Сигнал, вырабатываемый в процессе управления тягой главного движителя, представлен в виде sign2 k2FdуF + k2AdуA.
4. Выводы
Таким образом, инновационная стратегия управления по отклонениям включает формирование управляющего сигнала sign , величина которого определяет скорость изменения управляемых параметров. Законы формирования сигналов, вырабатываемых в процессе управления тягой движителя и тягами подруливающих устройств, включают разные коэффициенты k ; принципы формирования сигнала также разные: по сумме или по разности его компонентов. Данная стратегия является универсальным способом управления движением танкера при выполнении им сложного маневрирования на нефтяном терминале, находящемся в открытом море.
Список литературы Стратегия управления движением танкера на перекрестии
- Юдин Ю.И., Пашенцев С.В. Моделирование управляемого движения судна по произвольной траектории. Эксплуатация водного транспорта: ежекварт. сб. науч. ст. СПб., ГМА им. адм. С.О. Макарова, 2012. Вып. 3 (69). С. 32-36
- Юдин Ю.И., Петров С.О., Холичев С.Н. Способ управления траекторией движения судна. Пат. 2501064 РФ, МПК В 63 Н 25/52 (2006.01); заявитель и патентообладатель Мурман. госуд. техн. ун-т, № 2012108992/11; заявл. 11.03.2012; опубл. 10.12.2013, бюл. № 34. 9 с
