Структурная организация самоконтролируемых автоматов для систем реального времени

Автор: Мухопад Юрий Федорович, Мухопад Александр Юрьевич
Журнал: Проблемы информатики @problem-info
Рубрика: Теоретическая информатика
Статья в выпуске: 1 (18), 2013 года.
Бесплатный доступ
Проведен системный анализ основных публикаций о динамическом контроле микропрограммных автоматов (МПА). Выполнен сравнительный анализ МПА Мура и оригинального автомата с выделяемыми логическими условиями. Предложены новые эффективные методы контроля, реализуемые в МПА с новой структурной организацией.
Автоматы управления, алгоритм, комбинационная схема, структурный анализ, синтез, контроль автоматов.
Короткий адрес: https://sciup.org/14320190
IDR: 14320190 | УДК: 681.327;
Текст научной статьи Структурная организация самоконтролируемых автоматов для систем реального времени
Информационно-управляющие системы (ИУС) реального времени составляют основу средств автоматизации для мехатроники, летательных аппаратов, навигационных комплексов, технологических процессов и др.
Наиболее распространенной структурной моделью ИУС является модель В. М. Глушкова в виде операционного устройства и управляющего автомата, осуществляющего выдачу комплекса микроопераций для управления операциями преобразования и обработки информации. Согласно модели В. М. Глушкова ИУС содержат только два равноправных блока: операционное устройство (ОУ) и управляющий автомат (УА) [1].
Более детальной является модель ИУС Ю. Ф. Мухопада в виде пяти взаимосвязанных блоков: функционального, информационного, адресного, логического и управляющего [2, 3]. Для простейших ИУС УА реализуется в виде микропрограммного автомата, для более сложных ИУС каждый из блоков модели рассматривается как соответствующая подсистема с собственным УА. При этом УА становится иерархическим: верхний уровень — программный, а нижний уровень — микропрограммный автомат (МПА). В ряде случаев верхний уровень УА реализуется как МПА со структурой Мура. В зависимости от типа ИУС нижний уровень УА может быть комплексом МПА Мура или Мили.
Актуальность проблемы . Из результатов анализа следует определяющая роль УА в обеспечении правильности функционирования ИУС. Кроме того, идеология автоматного управления исключительно важна в следующих приложениях:
-
— конечные автоматы являются основой управления в любых ИУС от бытовых приборов до автомобилей и сложных технических систем;
-
— развивается направление создания спецпроцессоров с таблично-алгоритмическим набором функциональных преобразователей и МПА [2–4];
-
— УА составляют основу построения сверхбыстродействующих аппаратных средств криптографической защиты информации [5, 6];
-
— развиваются ИУС с элементами искусственного интеллекта с УА в виде комплексного МПА и таблично-алгоритмические структуры с МПА для задач классификации и распознавания образов с использованием когерентных локаторов;
-
— автоматный подход внедряется в программирование как в UML-технологию, так и непосредственно для составления программ [7–10].
Как правило, ИУС предназначены для управления ответственными процессами, в которых недопустима выдача неправильных команд, создающих опасную ситуацию. Для таких ИУС используются УА со встроенными средствами контроля, способными выдать сигнал о неисправности УА в процессе работы до выдачи очередной команды управления. Такие УА называются самоконтролируемыми. Проектирование схем самоконтроля УА связано с проблемой проектирования надежных МПА, отличающихся минимальными затратами логических элементов. Поэтому необходимо рассматривать структурную организацию МПА и методы минимизации для определения встроенных средств самоконтроля.
Теория анализа и синтеза МПА создавалась в основном в 1960–1999 гг. В последующее десятилетие в основном происходила адаптация типовых структур МПА к элементной базе БИС и СБИС [8, 11]. Это позволило авторам работы [7] сделать вывод о том, что теория аппаратной реализации МПА полностью завершена и новые постановки следует ожидать лишь в вопросах программной реализации моделей МПА. В настоящее время очевидна ошибочность такого вывода, поскольку в ведущих научных школах России и за рубежом появились новые разработки в области анализа и синтеза МПА на БИС, а также продолжаются теоретические работы в области конечных автоматов.
Структурная организация автоматов управления . Необходимо провести анализ структурной организации МПА для определения наиболее уязвимых блоков с целью разработки встроенных средств контроля. На рис. 1 приведена типовая структура МПА с правилом функционирования автоматов Мура (ОУ — операционное устройство (объект управления), выполняющее для МПА роль логической подсистемы, так как в ее состав включены датчики и схемы формирования двоичных сигналов; { α } — входные сигналы МПА; И — регистры памяти, составляющие основу информационного блока МПА; А — комбинационная схема F 1 для определения кода Y = y m ••• у 2 у 1 состояния автомата a ( t + 1) по коду X = x m ••• x 2 x 1 состояния a ( t ) и логическим условиям а а 1 а 2 ••• a q ; F 1 — адресный блок МПА (наиболее простым методом реализации F 1 является считывание кода Y по конкатенации а 1 а 2 • • • a q x m • • • x 2 x 1 , которая рассматривается как адрес ПЗУ); Ф — комбинационная схема F 2 для формирования управляющих команд A 1 A 2 • • • A k по коду состояния a ( t ); F 2 — функциональный блок; У — блок синхронизации (БС), формирующий по сигналу “Пуск” с периодом T импульсы синхронизации т 1 и т 2 , причем т i ( t ) Л т 2 ( t ) = 0; БС — управляющий блок МПА). Число состояний автомата N определяет m — разрядность кодов X и Y в соотношении N < 2 m . При реализации адресного блока на ПЗУ или ПЛМ условный объем памяти равен V = m • 2 m + q .
При оценке сложности автоматов по сравнению с адресным блоком остальные блоки можно не учитывать. Действительно, логический блок Л не относится непосредственно к МПА, информационный блок И — это два m -разрядных регистра памяти с парафазной связью между ними, а управляющий блок У для МПА — одна типовая микросхема генератора
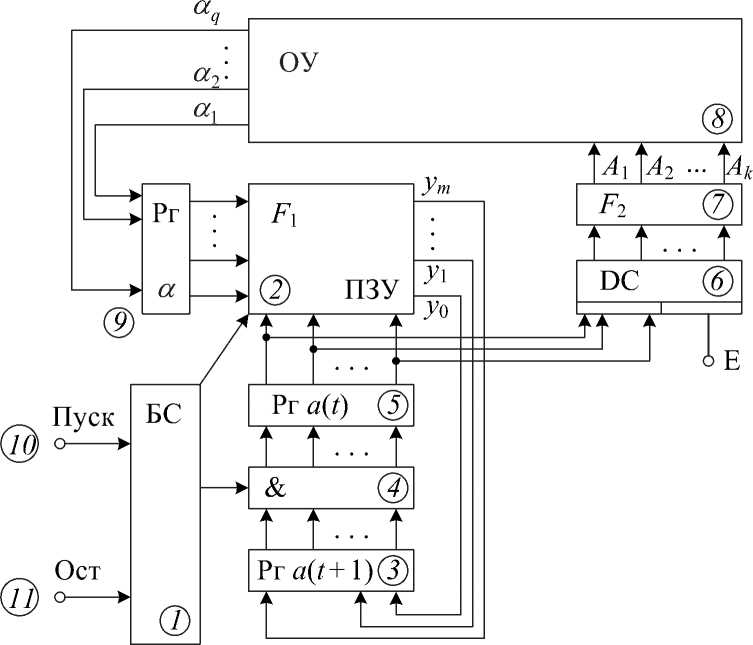
Рис. 1. Блок-схема автомата управления: 1–11 — номера блоков в порядке взаимодействия
Таблица 1
Основные параметры автоматов
По степени сложности адресного блока в соответствии с инженерной классификацией [9] МПА подразделяются на сверхпростые (СП), простые (ПА), средней сложности (СА) и высокой сложности (ВС) автоматы. В табл. 1 приведена оценка объема ПЗУ в килобитах. Из табл. 1 следует, что значение V для СА-автоматов может быть приближенно равно 1 Мбит, а для ВС составляет десятки мегабит.
При проектировании МПА прежде чем выбрать методы встроенного контроля, следует упростить А-подсистему. Существует два подхода:
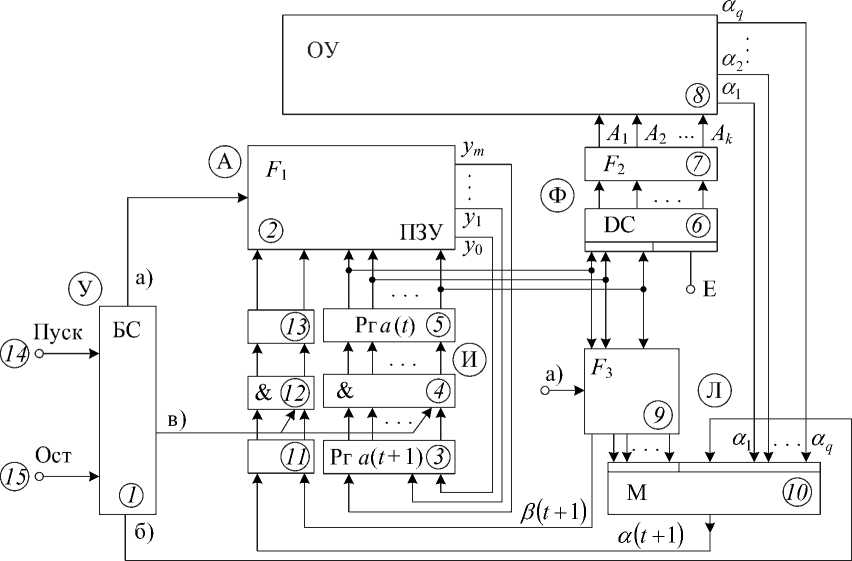
Рис. 2. Блок-схема автомата управления с выбором логического условия: 1–15 — номера блоков в порядке взаимодействия; Ф — функциональная подсистема; И — информационная подсистема; Л — логическая подсистема;
А — адресная подсистема; У — управляющая подсистема
-
— минимизация системы m булевых функций F 1 и реализация их на ПЛМ или ПЛИС с конкатенацией входных переменных { а }{ x }; число переменных равно m + q ;
-
— представление системы F 1 параллельной последовательной структурой комбинационных схем (декомпозиция), в которой каждая из подсхем имеет число переменных на входе меньше m + q .
Первый подход эффективен для СП- и ПА-автоматов, но для СЛ- и ВС-автоматов снижение сложности А-блока не превышает 15 % [11–14]. Второй подход [11, 13, 15] отличается высокой наукоемкостью, так как при проектировании необходимо в графе переходов найти несовместимые подграфы, решить задачу оптимальной раскраски графов и т. д. Однако эффект для СЛ- и ВС-автоматов также незначительный [15–18].
В работах [14, 19] предложен эффективный метод декомпозиции МПА, основанный на разделении не графов переходов, а исходной граф-схемы алгоритма (ГСА). Метод позволяет снизить объем ПЗУ (ПЛМ) в 1,5–1,7 раза для ВС- и СЛ-автоматов.
В работах [9, 20, 21] предложен кардинальный подход к снижению сложности А-блока, основанный на использовании оригинальной структуры МПА (рис. 2) с определением Y по коду X при использовании только одного логического условия a j Е { а } . Номер j для a j определяется по коду a ( t ). Метод синтеза таких МПА Мура и Мили приведен в работах [2, 9, 14]. Объем ПЗУ такого А-блока определяется величиной W = m • 2 m +1 . Значение W не зависит от числа логических условий q . Выигрыш в объеме ПЗУ, обозначенный символом Q , и величины W для всех типов автоматов приведены в табл. 1. Для СЛ- и ВС-автоматов выигрыш составляет от единиц до десятков тысяч раз.
Вносимые в новую структуру МПА новые блоки в виде мультиплексора для выбора a j E { а } и комбинационной схемы F 3 для определения j по коду a ( t ) в сумме не превышают сложности новой комбинационной схемы F 1 c m + 1 переменной на входе.
В начальный период развития теории МПА различали автоматы Мура, Мили и В. М. Глушкова. Однако затем автоматы В. М. Глушкова не стали выделять как самостоятельные, так как они имеют обобщенную структурную организацию без конкретизации способов формирования выходных сигналов.
Структурная схема МПА с выделенным мультиплексором не только оригинальна, но и отлична от типовых структур Мура и Мили. Поэтому новая структурная организация МПА определяет также принципиально новый подход к синтезу высоконадежных МПА и организации для них встроенных средств самоконтроля.
Методы контроля и диагностики МПА. Достаточно полного обзора методов контроля МПА не проводилось, поэтому в данной работе рассмотрены основные из них. В 1970– 1980-х гг. появились работы, посвященные контролю и диагностике ЭВМ, в которых частично ставилась задача контроля устройств управления, главным образом в режиме тестовой (предстартовой) проверки МПА [22–24]. Динамический контроль конечных автоматов развивался самостоятельно в двух не строго разделимых направлениях:
-
— встраивание средств контроля в уже спроектированный МПА;
-
— проектирование МПА, обладающих свойством самоконтроля.
Одной из первых появилась работа А. Д. Закревского [22], в которой предложена минимизация систем булевых функций не только основных разрядов, но и дополнительных, образующих контрольные биты, соответствующие коду Хэмминга [23]. Метод обеспечивает высокий уровень контролеспособности при небольшом увеличении объема F 1 , однако не нашел применения вследствие необходимости встраивать в структуру МПА сложный декодер кода Хэмминга.
Корректирующие коды, используемые для контроля комбинационных схем МПА, подробно рассмотрены в ряде монографий [24–27], а эффективность метода для обеспечения надежности МПА оценена в работе [28].
Второй подход предложен М. А. Гавриловым [29] для синтеза d -безотказных автоматов, правильно выполняющих функции при числе отказов t < d . Для реализации метода необходимо:
-
— представить состояния МПА векторами (словами) минимально избыточного корректирующего кода;
-
— чтобы расстояние между отдельными векторами соответствовало кодовому расстоянию по Хеммингу не менее 2 d + 1.
Метод М. А. Гаврилова изложен в работе [24], однако он также не нашел применения вследствие необходимости введения значительной избыточности и без того сложных СА- и ВС-автоматов.
В большинстве методов динамического контроля используются специальные коды для представления a ( t ) и a ( t + 1) вместо двоично-позиционного (ДПК) или двоичного соседнего кода (кода Грея). Поэтому далее следует рассмотреть различные типы кодирования для обеспечения самоконтроля МПА.
В работе [30] предложено использовать код с фиксированным числом “1”, обозначенный kCn, т. е. k единиц в n-разрядном коде. Этот метод имеет несколько модификаций, в частности разделение m-разрядного кода a (t) на две части и представление каждой из них кодом kCn, например 2 из 5 или 3 из 7 [16]. В работе [17] изложены методы синтеза схем проверки наличия двух единиц в пятиразрядном коде или трех единиц в семиразрядном коде и др. В работе [31] предложена модификация метода kCn, позволяющая обнаруживать отказы разрядных переходов из “0” в “1”.
Метод контроля kCn является наиболее простым и быстродействующим, но сами комбинационные схемы определения k единиц в n -разрядном результате достаточно сложны. Кроме того, объем ПЗУ равен не V = m • 2 m + q , а V = 2 m • 2 2 m + q .
Предлагается также при кодировании a ( t ) в виде ДПК дописать инверсный код, соответствующий числу единиц в ДПК (коды Бергера). Этот метод требует выполнения операций подсчета числа “1” в ДПК и сравнения с инверсным кодом [17, 24].
Другим подходом к контролю является метод В. Н. Балакина и В. В. Барашенкова [32, 33], который требует введения в структуру МПА счетчиков для определения числа операторов перед проверкой логических условий, введения в граф переходов специальных контролирующих состояний и др. Метод эффективен, так как не только проверяет правильность переходов a ( t ) ^ a ( t + 1), но и обнаруживает неверную генерацию A i вместо A j . Такие средства контроля весьма сложны, но применимы для контроля параллельных процессов [34].
Результативным подходом является метод А. Н. Буинова [35], предложившего построить объединенную матричную модель сигналов, представленных множеством допустимых состояний (матрица A ) и множеством запрещенных состояний для каждого допустимого состояния a ( t ) (матрица B ). Сравнение входных сигналов при достигнутом состоянии a ( t + 1) с матрицами A и B позволяет принять решение о правильности функционирования МПА. Метод А. Н. Буинова требует очень больших аппаратных и временных затрат и не нашел применения для динамического контроля, однако может быть использован для тестового контроля МПА, который в данной работе не рассматривается.
При динамическом контроле применим также известный метод полного дублирования МПА. Вариантом более эффективного контроля является самодвойственное дублирование, обеспечивающее в среднем 67 % избыточности при 99 % покрытия неисправностей [36]. Однако этот метод требует дальнейшего исследования, так как одновременно требуется двойная временная избыточность.
Новые методы самоконтроля. В работе [37] с целью уменьшения числа активных элементов в числовом блоке ПЗУ предложено использовать представление хранимого кода с фиксированным числом единиц как результат независимой дешифрации частей m -разрядного кода ДПК. Код назван геометрическим, так как работа [37] опубликована до появления кодов kCn . Более подробно метод изложен в работе [3]. В работе [38] идея этого метода использована для контроля ПЗУ. Для контроля МПА использован модифицированный геометрический код (МГК), определенный в виде конкатенации трехразрядных групп с одной единицей в каждой, причем в общем коде (МГК) с разрядностью n = 2 m ( m — разрядность ДПК) недопустимо соседство двух единиц в соседних разрядах между группами. Оригинальность метода [39] контроля МПА с МГК определяется тем, что код МГК используется только для представления a ( t + 1). Код a ( t + 1) по цепи обратной связи преобразуется в модифицированный двоичный код (МДК) по правилу 001 ^ 00 , 010 ^ 01 , 100 ^ 10. Тогда на входе F 1 в коде a ( t ) в каждой группе из двух разрядов не должно быть комбинации “11”, а на выходе F 1 в каждой группе из трех разрядов допустима единственная комбинация с одной “1”.
По уровню контролеспособности предложенный метод эквивалентен методу kCn, однако схемы определения наличия одной “1” в каждой группе из трех разрядов тривиальны в реализации, в отличие от схем определения k произвольно расположенных “1” в n-разрядном коде. Для МГК ошибка (ERR) в каждой группе из трех разрядов, обозначенных побитно a, b, c, определяется выражением
ERR = abCc + abc + abc).
Предложенный оригинальный метод самоконтроля [39] наиболее эффективен для новой структуры МПА, так как при использовании ПЗУ объем памяти W = т - 2 m +1 станет равным W = (2 т + 1) • 2 m +2 ( т + 1 — разрядность МДК; 2 т — разрядность МГК). Для типового МПА Мура при использовании МГК и МДК объем памяти равен W = 2 т • 2 2 m + q .
Для новой организации МПА становятся эффективными также другие методы контроля, в частности метод мажоритарного дублирования схемы F 1 . Применительно к МПА этот метод модифицирован следующим образом. Используются три комбинационные схемы F 1 , однако две из них осуществляют прямое преобразование a ( t + 1) = F i ( a j a ( t )), а третья схема реализует обратное преобразование a ( t ) = F 10 ( a j a ( t + 1)), причем в дублированных F 1 используется МГК, а в F 10 применяется МДК для представления a ( t + 1). Алгоритм проверки включает следующие действия:
-
1. Проверка отсутствия ошибок в МГК для всех дублированных F 1 , обозначенных F 1 1 и F 1 2 . Если в каждой схеме ошибки отсутствуют, то при равенстве выходов F 1 1 и F 1 2 код a ( t +1) считается верным.
-
2. При наличии ошибки в одной из дублированных схем выполняются преобразование a ( t ) = F 10 ( a j a ( t + 1)) и сравнение полученного кода a ( t ) 0 с исходным кодом a ( t ). При равенстве кодов результат считывается с исправной схемы F 1 . Иначе фиксируется ошибка.
Предложенный метод контроля обеспечивает безопасный режим работы МПА при любой кратности ошибок в А-подсистеме. Очевидно, что такой метод контроля невозможен в МПА с классической структурой Мура, так как в таких автоматах невозможно построить F 1 1 , F 1 2 , F 1 0 .
В новой структуре МПА применим еще один вариант дублирования комбинационной схемы F 1 . Структура МПА определяется следующими модификациями:
-
— в графе переходов МПА выделяется наиболее длинный путь, удовлетворяющий условию a ( t + 1) = 1+ к a ( t ) ( к — признак безразличного выбора значения к );
-
— для этих переходов предусматривается счетчик с кодом Грея, который одновременно выполняет роль выходного регистра памяти a ( t + 1) в И-системе МПА;
-
— остальные переходы реализуются схемой F 1 ;
-
— параллельно устанавливается дублирующая схема для вычисления кода a ( t +1). В этой схеме F 1 1 используется принцип независимого вычисления первой Y 1 и второй Y 2 половин Y кода a ( t + 1) по первой X 1 и второй X 2 частям X кода a ( t ) с учетом a j для первой и второй частей.
Поскольку при X 1 и X 2 используются только части X единого кода x 1 x 2 ··· x m , при вычислении Y 1 и Y 2 возможно появление неопределенности. Для ее ликвидации используется еще одна двоичная переменная γ , значение которой определяется в основной схеме F 1 совместно с кодом Y = у 1 у 2 • • • y m .
В предложенной схеме вычисления Y дублированная схема определения кода a ( t + 1) требует меньших затрат, чем при полном дублировании F 1 .
Синтез встроенных средств контроля рассмотрим на примере МПА с т = 4, q = 6, алгоритм работы которого представлен в виде логической схемы алгоритма (ЛСА)
2 1 2 13 3 45 5 64
A 0 ↓ A 1 α 1 ↑ A 2 α 2 ↑ A 3 A 4 ↓ ↓ A 5 A 6 α 3 ↑ A 7 A 8 α 4 ↑ ↓ A 9 A 10 A 11 α 5 ↑ A 12 A 13 A 14 α 6 ↑ ↓ A 15 A k .
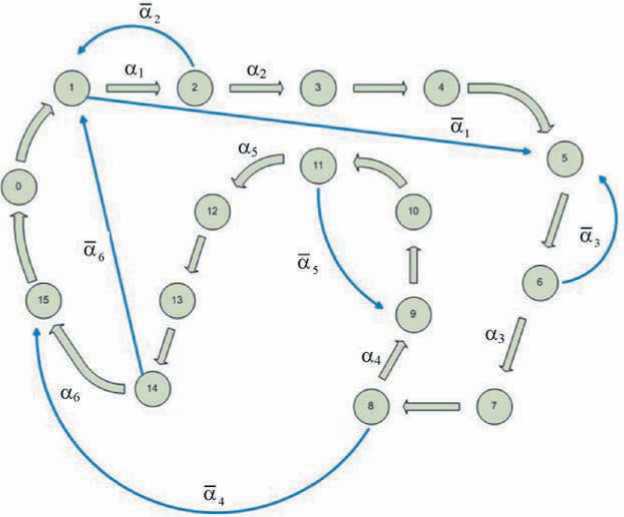
Рис. 3. Граф переходов МПА:
0-15 — узлы графа, соответствующие состояниям МПА; а 1 ,..., а 6 , а",..., а 6 — условные связи
В работе [2] приведены правила перехода от ГСА к ЛСА. Представленная ЛСА получена после модификации ГСА за счет введения пустого оператора A 2 . Граф переходов МПА для ЛСА представлен на рис. 3 (двойными стрелками отмечен непрерывный путь через состояния 0 , 1 , 2 ,..., 15 , 0). Такому пути может быть поставлен в соответствие счетчик, работающий в коде Грея (табл. 2). В этом случае схема F 1 реализует только шесть переходов по табл. 3. Заметим, что все переходы в F 1 реализуются по условию ∝ j , так как по условию ∝ j для данного примера переходы осуществляются по счетчику. Для построения контролирующей схемы по табл. 3 строится табл. 4, в которой в первом столбце введена логическая переменная y для снятия неопределенности при некоторых кодах: x 1 x 2 (00 ^ 01 , 00) и x з x 4 (01 ^ 01 , 11). Булевы функции у 1 , y 2 , у 3 , у 4 определяются по картам Карно на основе табл. 4. Реализация этих функций тривиальна, так как для примера определяется уравнениями
У 1 = ( x 1 x 2 + Yx 2 ) « ,
-
У 2 = ( Yx 1 x 2 ) « ,
-
У 3 = Y ( x 4 + x 3 ) « ,
у 4 = Yx 3 x 4 ^ -
При реализации МПА Мура по традиционной схеме с дублированием F 1 при m = 4 , q = 6 общий объем двух схем составит более 8 кб, так как для каждой схемы W = m • 2 m+q . В новом автомате необходимы одна схема с объемом W = m • 2 m +1 = 0,127 кб и тривиальная дублирующая схема для реализации уравнений Y . При больших значениях m, q преимущество предлагаемого метода самоконтроля и новой структуры МПА будут еще более значимыми.
|
Таблица 2 Четырехразрядный код Грея |
Таблица 3 Функции переходов МПА |
|||||
|
Номер |
0000 |
8 |
1100 |
a ( t ) |
α |
a ( t +1) |
|
1 |
0001 |
9 |
1101 |
1 |
∝ 1 |
5 |
|
2 |
0011 |
10 |
1111 |
2 |
∝ 2 |
1 |
|
3 |
0010 |
11 |
1110 |
6 |
∝ 2 |
5 |
|
4 |
0110 |
12 |
1010 |
8 |
∝ 4 |
15 |
|
5 |
0111 |
13 |
1011 |
11 |
∝ 5 |
9 |
|
6 |
0101 |
14 |
1001 |
14 |
∝ 6 |
1 |
|
7 |
0100 |
15 |
1000 |
|||
Таблица 4
Кодирование функций переходов МПА
|
γ |
N ( t ) |
α |
N ( t + 1) |
|
0 |
0001 |
0 |
0111 |
|
1 |
0011 |
0 |
0001 |
|
0 |
0101 |
0 |
0111 |
|
0 |
1100 |
0 |
1000 |
|
0 |
1110 |
0 |
1101 |
|
1 |
1001 |
0 |
0001 |
|
γ |
X 4 x 3 x 2 x 1 |
α |
Y 4 y 3 y 2 y 1 |
Предложенные методы синтеза безопасных МПА применимы в ИУС, не использующих параллельные процессы вычисления и управления. Параллелизм проявляется лишь в наборе микроопераций C 1 C 2 ··· C k в командах A i ∈ { A } . При параллельных вычислениях и одновременной выдаче нескольких команд управления перспективен подход с применением сетей Петри. В работе [40], по-видимому, впервые для контроля ИУС применены сети Петри с запрещающими дугами. Позднее такие модели были названы joiner-сети [41, 42].
В работах [14, 40] показано, что сеть Петри с запрещающими дугами реализуется двумя взаимодействующими автоматами, для которых входы одного автомата являются выходами другого.
При системном анализе методов и средств динамического контроля МПА рассмотрены лишь основные принципиально различающиеся постановки. Полный детальный анализ работ, посвященных построению безопасных автоматов, будет упрощен за счет использования результатов анализа, выполненного в данной работе.
Следует отметить особую роль исследований научной школы В. В. Сапожникова и Вл. В. Сапожникова. Результаты их многолетней деятельности приведены в фундаментальной публикации [43].
Следует отметить также высокую значимость новой структурной организации МПА для повышения контролеспособности и надежности.
В представленной работе в основном рассматривались автоматы Мура. Метод построения МПА Мили с новой структурной организацией предложен в работе [44].
Исследования новой структурной организации МПА только начаты, поэтому имеется резерв как для модификации, так и для создания новых методов самоконтроля МПА.
Заключение . Предложенная в данной работе структурная организация микропрограммных автоматов предоставляет возможность построения высоконадежных систем управления с оригинальными средствами самоконтроля, обеспечивающими режимы безопасной работы сложных технических систем реального времени при минимальных затратах специально встраиваемого оборудования.
Список литературы Структурная организация самоконтролируемых автоматов для систем реального времени
- Глушков В. М. Автоматно-алгебраические аспекты оптимизации микропрограммных автоматов//Тр. Междунар. конгр. математиков. М.: АН СССР, 1968. С. 53-55.
- Мухопад Ю. Ф. Теория дискретных устройств. Иркутск: ИрГУПС, 2010.
- Мухопад Ю. Ф. Проектирование специализированных микропроцессорных вычислителей. Новосибирск: Наука. Сиб. отд-ние, 1981.
- Информационные системы. Табличная обработка информации. Л.: Энергоатомиздат. Ленингр. отд-ние, 1985.
- Пат. РФ МКИ G11B20/20, 20/12. Устройство криптографической защиты информации/Ю. Ф. Мухопад, А. Ю. Мухопад, Б. Н. Антошкин. № 82889; 2009. Бюл. № 13.
- Renji Tao. Finita automata and application to cryptography. Beijing: Inst. of Software, 2007.
- Поликарпова Н. Автоматное программирование/Н. Поликарпова, А. А. Шалыто. СПб.: Питер, 2009.
- Соловьев В. В. Логическое проектирование цифровых систем на основе ПЛИС/В. В. Соловьев, А. Климович. М.: Горячая линия -Телеком, 2008.
- Мухопад А. Ю. Структурный синтез автоматов управления системами обработки информации реального времени: Автореф. дис.... канд. техн. наук. Братск: БрГУ, 2009.
- Воевода А. А., Романников Д. О. Использование UML и временных сетей Петри при разработке программного обеспечения//Сб. науч. тр. НГТУ. 2010. № 3. С. 61-70.
- Горбатов В. А. Теория автоматов/В. А. Горбатов, А. В. Горбатов, М. В. Горбатова. М.: АСТ “Астрель”, 2008.
- Ачасова С. М. Алгоритмы синтеза автоматов на ПЛМ. М.: Сов. радио, 1987.
- Закревский А. Д. Анализ и синтез каскадных схем. М.: Наука, 1981.
- Мухопад Ю. Ф. Микроэлектронные системы управления. Братск: БрГУ, 2009.
- Баранов С. И., Синев В. Н., Янцен Н. Я. Синтез автоматов на элементах с матричной структурой//Проектирование функционально-ориентированных вычислительных систем. Л.: Изд-во ЛГУ, 1990. С. 90-108.
- Cook G., Anderson D., Metze G. Design of totally self cheek circuits for m-out-ofn codes//IEEE Trans. 1973. V. 22, N 3. P. 255-263.
- Сапожников В. В. Теория дискретных устройств ж. д. автоматики, телемеханики и связи/В. В. Сапожников, Вл. В. Сапожников, Ю. М. Кравцов. М.: Транспорт, 2001.
- Рыцар Б. Е., Кметь А. Б. Новый метод кодирования подфункций в задачах синтеза цифровых устройств на ПЛМ//Кибернетика и систем. анализ. 2003. № 2. С. 63-89.
- Бадмаева Т. С., Деканова Н. П., Мухопад Ю. Ф. Синтез самоконтролируемой системы управления электроавтоматикой//Математические и информационные технологии в энергетике, экономике, экологии. Иркутск: СЭИ СО РАН, 2003. Ч. 1. С. 88-92.
- Пат. РФ МКИ G06F9/00(2006.01). Микропрограммный автомат/А.Ю.Мухопад, Ю. Ф. Мухопад. № 82888; 2006. Бюл. № 13.
- Mukhopad Yr. F., Mukhopad А. Yr. Microelectronic controlling of realtime complicated technical systems//Intern. J. Appl. Fund. Res. 2009. N 2. P. 26-29.
- Закревский А.Д. Метод синтеза функционально устойчивых автоматов//Докл.АНСССР. 1969. № 4. С.381-386.
- Hamming R. W. Error detecting and error correcting codes//Bell System Tech. 1950. V. 29, N 2. P. 147-160.
- Согомонян Е. С. Самопроверяемые устройства и отказоустойчивые системы/Е. С. Согомонян, Е. В. Слабаков. М.: Радио и связь, 1989.
- Францис Т. А. Избыточность в электронных дискретных устройствах/Т. А. Францис, Г. Ф. Янбых. Л.: Энергия, 1969.
- Щербаков Н. С. Структурная теория аппаратного контроля цифровых автоматов/Н. С. Щербаков, Б. П. Подкопаев. М.: Машиностроение, 1982.
- Тоценко В. Г. Алгоритмы технического диагностирования дискретных устройств. М.: Радио и связь, 1985.
- Францис Т. А., Бузинаускене Е. Н. Нижняя оценка выигрыша надежности при использовании кодов Хемминга в комбинационных автоматах//Вопросы надежности дискретных автоматов. Рига: Зинатне, 1970. С. 3-16.
- Гаврилов М. А. Структурная избыточность и надежность работы релейных устройств//Тр. 1-го Междунар. конгр. Междунар. федерации по автомат. управлению. М.: Изд-во АН СССР, 1967. Т. 3. С.105-112.
- Toma Y., Ohаyama J., Sakaj R. Realization on fail-sale sequential machines by using a k-out-of-N code//IEEE Trans. Comput. C-22, 1971. N 11. P.22-27.
- Валиев Ш. К. Способ построения и реализации асинхронных конечных автоматов//Совершенствование и повышение надежности железнодорожных систем автоматики и связи. Днепропетровск: ДнИИЖТ, 1985. С. 88-95.
- Балакин В. Н., Барашенков В. В., Усачев Ю. Е. Синтез устройства диагностирования по схемам алгоритмов управления//Автоматика и телемеханика. 1984. № 6. С. 138-144.
- А. с. СССР МКИ G11C11/00(2006.01). Устройство для контроля блоков управления/В. Н. Балакин, В. В. Барашенков, А. Ф. Казак, С. А. Никищенков. № 1365986; 1988. Бюл. № 1.
- Никищенков С. А. Функциональная диагностика реконфигурируемых транспортных технологических систем по информационно-логическим схемам процессов. Самара: СНЦ РАН: СамГАПС, 2005.
- Буинов А. Н. Построение управляющих автоматов с безошибочным поведением//Проектирование специализированных вычислителей и управляющих устройств. Иркутск: ИГУ, 1984. С. 3-9.
- Сапожников В. В. Самодвойственные дискретные устройства/В. В. Сапожников, Вл. В. Сапожников, М. Гессель. СПб.: Энергоатомиздат. С.-Петерб. отд-ние, 2001.
- Смолов В. Б., Чекмарев Ю. Д., Мухопад Ю. Ф. Использование системы геометрических кодов в ПЗУ//Изв. вузов. Сер. Приборостроение. 1971. Т. 14, № 6. С. 73-79.
- А. с. СССР МКИ G05B19/045. Постоянное запоминающее устройство с контролем/Ю. Ф. Мухопад, Ю. Д. Чекмарев. №1410101. 1988. Бюл. № 26.
- Пат. РФ МКИD11C11/00(2006.01).Самоконтролируемый автомат управления/Ю. Ф. Мухопад, А. Ю. Мухопад, Т. С. Бадмаева. № 63588; 2007. Бюл. № 15.
- Мухопад Ю. Ф., Сербуленко Л. М. Автоматная интерпретация устройств контроля микропроцессорных систем//Микропроцессорные системы контроля и управления: Тр. Сиб. науч.техн. конф., Новосибирск, 10-11 сент. 1992 г. Новосибирск: НЭТИ, 1992. С. 41-49.
- Новик К. В. Сеть автоматов для моделирования асинхронного взаимодействия процессов: Автореф.... дис. канд. физ.-мат. наук. М.: Изд-во МГУ, 2005.
- Вильнер П. Ю. Метод диагностирования отказов сложных технических систем с использованием сетей Петри//Информационные и математические технологии в науке, технике и образовании: Тр. 10-й Байкал. Всерос. конф., Иркутск, 10-14июля 2005г. Иркутск: ИСЭМ СОРАН, 2005. Ч. 1. С. 239-335.
- Труды по теории синтеза и диагноза конечных автоматов и релейных устройств СПб.: СПБ ГУПС: Элмор, 2009.
- Мухопад Ю. Ф., Мухопад А. Ю. Методы синтеза автоматов управления на больших интегральных схемах//Пробл. информатики. 2011. № 4. С. 17-28.
