Структурное моделирование процессов теплопроводности с замыканием распределенных обратных связей

Автор: Лелеков Александр Тимофеевич
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 1 (14), 2007 года.
Бесплатный доступ
Предложена формальная методика построения моделей объектов с распределенными параметрами в виде структурной схемы. Представлен вариант замыкания распределенной обратной связи, обеспечивающий высокую точность моделирования при низких затратах вычислительных ресурсов.
Короткий адрес: https://sciup.org/148175463
IDR: 148175463 | УДК: 613.21
Structural modeling of heat-transfer processes with closing distributed parameters feedback
The formal method for building structural-diagram models of distributed parameters objects is offered. The alternate technique of closing of distributed parameters feedback with high accuracy and small requirements to computational power is proposed.
Текст научной статьи Структурное моделирование процессов теплопроводности с замыканием распределенных обратных связей
При расчетах и моделировании реальных объектов и систем не всегда удается пренебречь их распределенностью в пространстве. Построение распределенных моделей объектов само по себе является достаточно сложной задачей, решение которой привело к широкому распространению приближенных методов моделирования объектов с распределенными параметрами (ОРП) [1.. .3]. При этом преобладающей тенденцией является стремление к построению эквивалентных сосредоточенных моделей, поскольку с их помощью можно описать ОРП простой сосредоточенной моделью с любой желаемой точностью и с сохранением ее аналитических свойств, а после аппроксимации применить привычный фундаментальный математический аппарат теории автоматического управления.
Решим в общем виде краевую задачу параболического типа методом Гринберга, или обобщенным методом Фурье [4] (при решении были использованы обозначения [5]). Для упрощения возьмем одномерную тепловую задачу.
Пусть имеем распределенную краевую задачу, описывающую процессы диффузии, с постоянными по времени коэффициентами, решение которой T = T ( x. t ) удовлетворяет неоднородному дифференциальному уравнению (ДУ) в частных производных:
L x { T } + M, { T } = F ( x . t ) , x G ( c . d ] , t G [ °, ~ ) , где L x { T } и Mt { T } - линейные дифференциальные операторы:
а по переменной t - начальным условиям
T ( x . t ) t =
= Пф ( x ) , v T ( x . t ) d t v '
= TM x ) ,
t =0
где T 0 и T - масштабные коэффициенты.
Пусть функцию внутреннего воздействия можно представить в виде F ( x.t ) = а ( t ) в ( x ) ,где в ( x ) -известная аналитическая функция пространственного распределения входного воздействия, фиксированная на все время моделирования; функция а ( t ) - времязависимый компонент воздействия, который может иметь любой вид и
быть заранее неизвестный. Таким образом, уравнение диффузии запишется в виде
Lx {T} + Mt {T }=а( t )р( x).
Преобразуем по Лапласу исходные уравнения задачи по переменной t . Получим L x { T } + M s { T } = А ( s Ш x ) , или, с учетом вида выражения для оператора Mt { T } ,
L 1 Mil = A ^-T + B — + CT ^ > T(As2 + Bs + C ) —
I t { } d t2 d t | ( )
- Ds ■ T m ( x ) — E ■ T ° 9 ( x ) =
= T ■ M s ( s )- T i D s -V ( x )- T ° E "ф ( x ) . L x { T } + T ■ M s ( s ) = A ( s ) P ( x ) +
+ TDs ■ m ( x ) + T ° E ■ ф ( x ) .
Lx {T} = \ г r ( x)^dx
p ( x ) I - q ( x ) ■ T d x )
M {T } = a Ц- + B ^T + CT t { } d t1 d t ’
у которых функции p ( x ) , p ‘ ( x ) , q ( x ) , r ( x ) непрерывны на интервале [ c, d ] , p ( x ) > ° , r ( x ) > ° .
Кроме того, функция T = T ( x. t ) удовлетворяет по переменной x граничным условиям (ГУ) одного из следующих типов:
- ГУ I рода
T ( x , t )| x = c =Y c ( t ) , T ( x , t )| x = d = Y d ( t ) ;
- ГУ II рода
^T ( x.t ) =Y c ( t ).£ T ( x.t ) =Y d ( t ) ; x = c x = d
-ГУШ-ГУрода dxT(x.t)-hc • T(x.t)
■^ T ( x . t ) - h d • T ( x . t ) d x
= Y c ( t ) ,
, =
= Yd (t)
Рассмотрим соответствующую задачу Штурма-Лиувилля (разложение решения исходного однородного уравнения в ряд по собственным функциям по координате x с нулевыми ГУ) и найдем нетривиальные решения уравнения L x { X ( x ) } +X X ( x ) = 0 , удовлетворяющие нулевым ГУ. Запишем L x { T } в явном виде:
r ( x x)
p ( x ) X ( x ) |- q ( x ) ■ X ( x )
+ X X ( x ) = 0 ,
или ( pX ‘ ) + ( % r - q ) X = 0 , (2)
удовлетворяющее соответствующим нулевым граничным условиям. При сделанных предположениях задача регулярна [4; 6] и имеет дискретный спектр собственных значений % n . Пусть X = X n ( x ) -собственные функции поставленной задачи. Найдем решение задачи по методу Гринберга [4] в виде
Cn (s ) =
и
T ( x. s ) = Z Cn ( s ) Xn ( x ), n=1
d
J r (x) T (x. s) Xn (x) dx
c
Tn (s )
IIXn (x )|I' IXn (x )|Г
Изображение времязависимого коэффициента T n ( s ) получим по исходному уравнению задачи. Умножим выражение (1) на r ( x ) X n ( x ) и проинтегрируем его по x :
d ( XГ д ( . д T
J Xn (x) д~1 Р(x).> J дx дx
c
^^^^^^s
q ( x ) • T dx +
T n M s ( s ) -% T = A ( s ) ₽ . + sT 1 D V . + T o E ф . - G n ( s ) .
В [4] показано, что функция G n ( s ) имеет вид Gn ( s ) = ю n г c ( s ) + ^ n г d ( s ) , где коэффициенты ю . и ^ . находятся в зависимости от вида граничных условий за
d
+ J T • M s ( s ) r ( x ) X n ( x ) dx =
c
d
= J A ( s ) в ( x ) r ( x ) X n ( x ) dx +
c
d
+ J Ds • у ( x ) r ( x ) Xn ( x ) dx +
c
d
+ J E ^ф ( x ) r ( x ) Xn ( x ) dx .
Взяв по частям первый интеграл, имеем [4]:
дачи.
Таким образом, получаем следующее решение:
Tn (s ) =
A(s )вn + sTDVn + T0EФn -юnГc (s )+^nГd (s ) Ms (s)-%n
Учитывая Cn ( s ) , получим
^
T (x, s ) = ^
n =
T n ( s ) X " ( x ) = A( s )B( x . s ) + T v ( x , s ) +
II x. (x 1
" дГ - X. nn
G n ( s )
+
c
+ T o Ф ( x,s ) -Г c ( s ) Q ( x,s ) +Г d ( s ) E ( x,s ) .
Это выражение может быть представлено в виде структурной схемы (рис. 1).
Решение T ( x, s ) получено путем подстановки интересующих значений координаты x и дальнейшего обратного преобразования Лапласа аналитически или численно. В статье [7] приведена структурная схема задачи нагрева бесконечного цилиндра, результаты моделирования и их сравнение с известными аналитическими решениями из монографии [5].
Представленный выше вид решения (2) и структурную схему (см. рис. 1) возможно получить и другими методами. Например, в [1] приведено доказательство правомерности такого подхода с использованием метода функций Грина. Там же введено понятие переходного х-блока с сосредоточенным управлением, если решение получено для всей области объекта, и переходного x ^ -блока, если решение получено для конкретных значений точек x = x k .
Более сложная ситуация возникает, если убрать допущение об известном виде пространственно-зависимой
d d-
J ( pX n ) - qX n dx + M s ( s ) J T • r Xndx =
d
d
+
1 L4 4 4 2 4 4 ^3
=-% С • X n ="% . T
d
c
T
n
d
A (s) J в (x) rXndx + TDs J v(x) rXndx + cc в n V n
d
+ T o E J ф ( x ) rX n dx,
_ Фn где Tn (s), %., в., у., ф. - функции координаты учетом (2) получаем уравнение для Tn (s):
x .C
Начальные условия
Внутреннее управление
Граничное управление
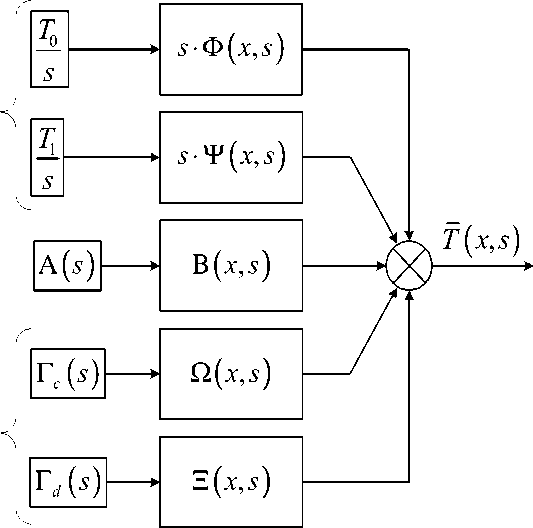
Рис. 1. Структурная схема решения распределений задачи без получения фундаментального решения: s - оператор Лапласа; T ( x, s ) - изображение решения исходного ДУ процессов диффузии
составляющей в ( x ) функции внутреннего управления. В этом случае решение может быть получено в виде пространственной композиции, представляющей собой операцию пространственного интегрирования произведения функции Грина и в ( x ) в пределах области объекта [1]. Эта операция сама по себе достаточно сложная, редко может быть решена аналитически, мало пригодна для инженерных расчетов и имитационного моделирования в пакетах прикладных программ, а затраты вычислительных ресурсов в этом случае сравнимы с методом конечных элементов.
В монографии [3] приведен инженерный метод имитационного моделирования, основанный на приближенном вычислении интеграла пространственной композиции. Для этого в области объекта выделяют точки или линии приложения воздействия (входы), интерполирующие функцию в ( x ) . Далее подбирают некоторые весовые коэффициенты, при которых сумма функций отклика от приложенных в выбранных точках воздействий повторяет точное решение распределенной задачи. Точность решения определяется размерностью модели по входу а функции отклика получают, интегрируя функцию Грина заранее.
Используя описанный выше метод получения структурной схемы распределенной задачи без получения фундаментального решения, можно получить решение даже при изменяющейся во времени зависимости в ( x ) . Если функция внутреннего управления представлена в виде конечной суммы, то вследствие свойства линейности уравнения диффузии решение уравнения (3) будет иметь вид
T(x,5) = ХАk (5)Вk (x,5) + TiW(x,5) + k
+ T Ф ( x, 5 ) —Г c ( 5 ) Q ( x, 5 ) + Г d ( 5 ) E ( x, 5 ) .
Оно может быть представлено в виде структурной схемы (см. рис. 1), в которой функция внутреннего управления будет иметь k входов.
Удобный способ такой аппроксимации функции внутреннего управления - это приближение управления полиномиальной зависимостью по координате с времяза-
N висимыми коэффициентами F(x,t) = Z«k (t)xk.
k =0
Точность решения будет определяться только точностью аппроксимации, т. е. порядком многочлена к.
В любом случае при неизвестном заранее управлении должен производиться такой подбор коэффициентов ak (t), чтобы F(x,t) = ^аk (t)Pk (x) ,где вk (t) может k быть любой функцией. В модели должен быть реализован блок подбора ak (t), например с использованием методов Гаусса-Ньютона, Левенберга-Марквардта или модифицированных методов для аппроксимации полиномами.
Таким же образом через блок подбора a k ( t ) может быть заведена распределенная обратная связь. Используя теорему о непрерывной зависимости решения от параметров уравнения и правой части, можно сократить время вычислений, если производить поиск коэффициентов на z-м шаге a k ( t , ) в окрестности значений предыдущего шага интегрирования a k ( t , - 1 ) .
Пусть функция внутреннего тепловыделения имеет вид
F (x, t ) = N {U (t )• V (x), T (x, t)}, где N - некоторый оператор; U(t)• V(x) - внешний фактор тепловыделения; T(x, t) -температура объекта. И пусть пространственную составляющую функции F (x, t) можно интерполировать многочленом первого порядка F (x, t) = a (t) x + b (t), где а и b - коэффициенты, зависящие от ии Т, т. е. ии Тсами имеют линейный вид зависимости по координате. Тогда структурная схема объекта с замкнутой по T (x, t) обратной связью будет иметь вид, показанный на рис. 2.
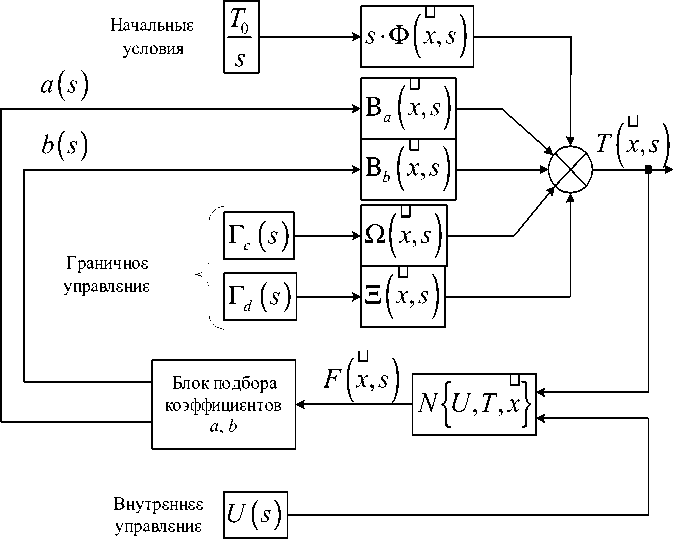
Рис. 2. Структурная схема объекта замкнутой по Т(х, f) обратной связью
В случае когда пространственная составляющая функции внутреннего тепловыделения имеет простой вид, алгоритм блока подбора коэффициентов можно записать аналитически и объединить его с оператором N в одну нелинейность. Помимо этого, разумным выбором координаты и количества точек x функции F ( x,s ) ,т. е.переходом от бесконечномерного распределения x к вектору x = [ x 1 , x 2,К , x m ] ,по которым производится аппроксимация, можно существенно сократить размерность задачи, сохранив точность и быстроту решения.
Таким образом, сделаем следующие выводы:
-
- автором предложен метод, позволяющий рассчитывать передаточные функции объектов с распределенными параметрами, описываемые уравнениями диффузии с постоянными коэффициентами при входных воздействиях, приближаемых линейным оператором время-и пространственно-зависимой компоненты. Метод основан на решении задачи в области изображений без получения фундаментального решения, с допущением об известном характере пространственного распределения функции управляющего воздействия;
-
- представлен вариант замыкания распределенной обратной связи, основанный на представлении поля решения линейным оператором время- и пространственно-зависимой компоненты;
-
- предложенный метод позволяет существенно уменьшить размерность задачи, обеспечивает высокую точность моделирования при низких затратах вычислительных ресурсов, допускает простую реализацию в пакетах имитационного моделирования;
-
- модель объекта с распределенными параметрами может быть получена в аналитической форме, что по
зволяет производить анализ системы при переменных коэффициентах дифференциального уравнения.
