Структурный и параметрический синтез рычажно-винтового исполнительного механизма виброперемешивающего устройства

Автор: Смелягин Анатолий Игоревич, Юхневич Илья Владимирович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Транспортное и сельскохозяйственное машиностроение
Статья в выпуске: 4-2 т.15, 2013 года.
Бесплатный доступ
Традиционные исполнительные механизмы виброперемешивающих устройств не обеспечивают рациональные законы движения рабочих органов. Используя разработанные структурные математические модели, синтезирован новый исполнительный механизм, у которого амплитуда колебаний рабочего органа определяется исходя из обеспечения рационального технологического процесса. Разработана методика параметрического синтеза предложенного механизма, и определены размеры его звеньев при наложенных ограничениях по углу колебаний коромысла, углу давления и коэффициенту изменения средней скорости.
Виброперемешивающее устройство, рычажный механизм, структурная математическая модель, шарнирный четырехзвенник, винтовой механизм
Короткий адрес: https://sciup.org/148202330
IDR: 148202330 | УДК: 621.01
Structural and parametric synthesis of bar-screw actuator at vibromixing device
Traditional actuators of vibromixing devices do not ensure rational laws of working bodies movement. Using designed structural mathematical models, the new actuator was synthesized, at which the amplitude of working body oscillations is defined proceeding from rational technological process. The method of parametric synthesis of the offered mechanism is developed, and sizes of its links are defined at the imposed limitations on an edge of balance oscillations, edge of pressure and factor of middle velocity change.
Текст научной статьи Структурный и параметрический синтез рычажно-винтового исполнительного механизма виброперемешивающего устройства
перспективность применения кривошипноползунных, кулисных и других рычажных механизмов в качестве исполнительного механизма (ИМ) ВПУ. Однако применение простых рычажных механизмов в ВПУ не позволяет обес- печить оптимальные для технологического процесса амплитуды колебаний рабочих органов. Это связано с тем, что размеры кривошипа в этих механизмах, задающие амплитуду колебаний рабочих органов, определяются, прежде всего, мощностью привода, а не требованиями технологического процесса. Для решения данной проблемы синтезируем новый ИМ ВПУ, у которого амплитуда колебаний рабочих органов будет определяться только технологическими про- цессами.
Структурный синтез ИМ ВПУ. Для решения поставленной задачи синтезируем сложный [6], состоящий из двух простых, рычажный ИМ ВПУ. Синтез ИМ ВПУ проведем с использованием структурной математической модели [6] которая имеет вид:
1 Г )
p =—I у tn, + ^ ;
t
2 i t = T - j j
T n = 2 n t ; t = t - j
П - 1
\ W = 2 pit- kn ;
i = 1
k = p - n ;
n - 1
p = 2 pip i = 1
T < k + 1.
где р – общее число кинематических пар; Т – количество вершин базового звена; t – число вершин звеньев; n – общее число подвижных звеньев; n t – число подвижных звеньев с t вершинами; р i – число кинематических пар i -той подвижности; k – число независимых замкнутых контуров; П – подвижность пространства, в котором синтезируется механизм; S – число присоединений к стойкам; i =1, 2, 3, 4, 5 – целочисленный индекс; j =0, 1, 2, … целочисленный индекс.
Синтез первого механизма. Так как желательно, чтобы ИМ ВПУ был относительно не сложным, то пусть синтезируемый механизм будет существовать в трехмерном (M=3) трехподвижном (П=3) пространстве; иметь одну степень свободы (W=1); иметь один независимый контур (k=1); иметь двухвершинное базовое (Т=2); иметь только одноподвижные вращательные кинематические пары. Структурная математическая модель (1) после подстановки в нее исходных данных примет вид p=2 (2 n 2 + S);
n = n 2 ;
< 1 = p 1 - 3;
1 = p - n ;
p = p i;
2 < 2.
Понятно, что в синтезируемом механизме число звеньев, кинематических пар и присоединений к стойке должно быть целым и положительным. Следовательно, решение модели (2) должно удовлетворять этим условиям. Целочисленными корнями модели (2) являются следующие значения: р =4; n =3; S =2.
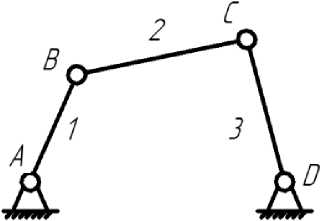
Рис. 1. Шарнирный четырехзвенник:
А, В, С, D – кинематические пары; 1, 2, 3 – подвижные звенья
Из найденного решения следует, что синтезируемый механизм должен иметь: четыре одноподвижные вращательные кинематические пары; три подвижных звена; два присоединения к стойке. По найденному решению и условиям синтеза можно создать только один механизм – шарнирный четырехзвенник (рис. 1). Этот механизм преобразует вращательное движение кривошипа 1 в возвратно-вращательное движение коромысла 3.
Синтез второго механизма. Так как желательно чтобы ИМ ВПУ был относительно не сложным, то пусть второй синтезируемый механизм будет существовать в двухмерном ( М =2) двухподвижном ( П =2) пространстве; иметь одну степень свободы ( W =1); иметь один независимый контур ( k =1); иметь двухвершинное базовое ( Т =2). Так как этот механизм должен будет преобразовывать возвратно-вращательное движение в поступательное, то при его создании будем использовать вращательные, поступательные и винтовые одноподвижные кинематические пары. Структурная математическая модель (1) после подстановки в нее исходных данных примет вид:
p = 2 (2 n 2 + S);
-
n = n 2;
-
< 1 = p i - 2;
-
1 = p - n ;
p = p 1;
-
2 < 2.
Целочисленными корнями модели (3) являются следующие значения: р =3; n =2; S =2. Из найденного решения следует, что синтезируемый механизм должен иметь: три одноподвижные кинематические пары; два подвижных звена; два присоединения к стойке. Анализ решения (3) показал, что синтезу ВПУ соответствует структурная схема винтового механизма, приведенная на рис. 2. Из рис. 2 видно, что этот механизм преобразует вращательное движение звена 1 в поступательное движение штока 2.
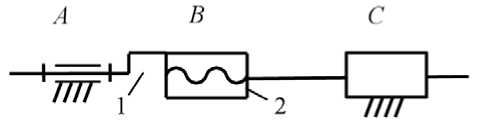
Рис. 2. Винтовой механизм.
А, В, С – кинематические пары; 1, 2 –подвижные звенья
Объединив синтезированные механизмы (рис. 1, рис. 2) получим сложный кривошипновинтовой механизм, представленный на рис. 3. В предложенном механизме вращательное движение кривошипа преобразуется в возвратно-вращательное движение коромысла, а затем винтовым механизмом трансформируется в возвратно-поступательное движение выходного звена. Амплитуда колебаний рабочего органа (выходного звена) определяется не размерами кривошипа, а углом поворота коромысла и параметрами резьбы, поэтому она всегда может быть согласованна с требуемой технологическим процессом.
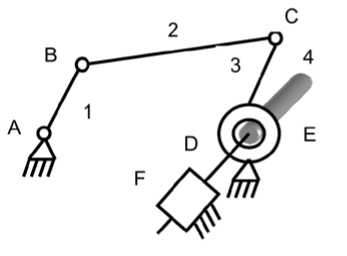
Рис. 3. Кривошипно-винтовой механизм.
A, B, C, D – вращательные кинематически пары; E, F – соответственно, винтовая и поступательная кинематически пары; 1, 2, 3, 4 – подвижные звенья
Параметры резьбы определяются диаметром винта, поэтому создание рационального ИМ ВПУ сводится к параметрическому синтезу шарнирного четырехзвенника по заданному углу колебаний коромысла, при наложенных ограничениях на коэффициент изменения средней скорости к (отношение времени прямого хода ко времени обратного хода) и угол давления в одном из крайних положений (β).
Параметрический синтез ИМ ВПУ. Для решения поставленной задачи, как и в [7] построим модифицированную расчетную схему шарнирного четырехзвенника с заданным углом колебаний α в крайних положениях коромысла.
Построение расчетной схемы (рис. 4) проводим следующим образом. Строим равнобедренный треугольник DC 2 C 1 , со сторонами DC 1 и DC 2 равными длине коромысла l 3 , и углом а. Проводим биссектрису DE угла α. Определяем угол Θ между крайними положениями шатуна
1-к
0 = 180°--.
-
1 + к (4)
Из точки С1 или С2 под углом 90°-Θ к С1С2 проведем линию С1F или C2F, до пересечения (точка F) с линией DE. Из точки F радиусом C1F строим дугу окружности. Из точки С2, под углом 90+β к отрезку DС2, проводим линию до пересечения с дугой окружности (точка А). Соединяем точку А с точкой С1 отрезком АС1. Точки A и D определяют место расположения одноименных (см. рис. 3) кинематических пар, соединяющих кривошип и коромысло со стойкой, а отрезок AD определяет расстояние l0 между этими кинематическими парами. С1, С2 и B1, B2 – соответственно, положения кинематических пар С и В (см рисунок 3), при крайних положениях коромысла. Так как ∆C1ED и ∆C1EF имеют общий катет С1E (рис. 4), то радиус С1F дуги окружности определится
С 1 F = 13 • Sm(a /2) sin(0)
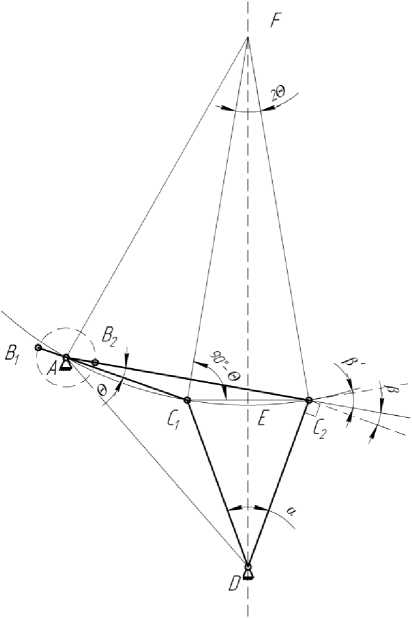
Рис. 4. Расчетная схема
Угол в' между касательной к окружности в точке С 2 и прямой АС 2 , будет
в = (а/2 + 0) - в (6)
Длина хорды AC 2 , определится
AC2 = 2 • C 1 F • sin(в').
Угол AFC 1 , будет
AFC1 = 2 •(в— 0\
С учетом (7), AC 1 , определится
AC 1 = 2 • C1 F • sin( в'-0).
Длины кривошипа l 1 и шатуна l 2 , будут:
l _AC 2 + AC 1.
-
2 — 2;
_ AC 2 - AC 1
1 2(10)
Подставив (5), (6) , (7), (9) в (10), найдем длины кривошипа и шатуна:
f®
1, — 2 ■ sin
1 1 2
f a ® ) sin(a/2) ■ cosl - в ++ I-
( 2 2 ) sin( ® )
.1 •
3 ;
Найдем относительные длины звеньев шарнирного четырехзвенника, соответствующего следующим начальным условиям синтеза α=60°; β=20°; k=0,9. После подстановки начальных условий, в (16), (17), (18) найдем: l 13 =0,48521; l 23 =1,54021; l 03 =1,92792.
Для синтезированного шарниного четы-рехзвенника с помощью кинематической модели, приведенной в [8], построены графики угла поворота коромысла φ 3 = f (φ 1 ), и угла давления β 3 = f (φ 1 ) от угла поворота кривошипа, а так же определен средний угол давления (рис. 5).
, „ f®^ • f a « ®A sin(a/2),
L — 2 ■ cosl I ■ sinl - в + + I ■■
2 (2) ( 2 2) sin(®)
Длину l 0 найдем из треугольника AC 2 D по теореме косинусов
1 0 — 4AC 22 + DC 2 2 - 2 AC 2 ■ DC 2 ■ cos(90 - в ).
Подставив (6), (7), (8) в (14) и, обозначив
D n • z a sin(0,5 a )
B — 2 ■ sin(— + ® - в )--------
2 sin( ® ) , (14)
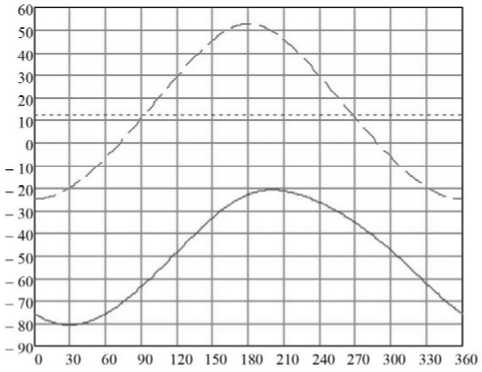
Рис. 5. Графики - φ 3 = f (φ 1 );
β 3 = f (φ 1 ), - средний угол давления
после ряда преобразований, найдем расстояние l 0
1 0 — 1 3 ■ 4B 2 - 2 B ■ sin в + 1.
Для проведения целенаправленного параметрического синтеза шарнирного четырехзвен-ника представим длины его звеньев в безразмерной форме, для чего разделим (11), (12) и (15) на длину коромысла l 3 , в результате найдем искомые длины звеньев механизма:
f® ) f „ a ® ) sin( a /2)
1 — 2 ■ sin ■ cos - в ++ ;
13 ( 2 ) ( 2 2 ) sin( ® )
(®1 • f
1 23 — 2 ■ cos l — I ■ sin l -
„ a ® ) sin( a /2) в + — + — I-------•
2 2 )
1 03 — 4 B 2 - 2 B ■ sin в + 1.
sin( ® )
;
Анализ построенных графиков показывает, что: угол колебаний коромысла соответствует заданному и составляет 60°; коэффициент изменения средней скорости k , равен 0,9, что соответствует заданным условиям; угол давления β (средний – 12,151°, а максимальный – 52,717°) меньше допускаемого ([β]=60°) [9].
Выводы: синтезированный шарнирный четырехзвенник полностью соответствует начальным условиям параметрического синтеза и может быть использован в качестве ИМ ВПУ, а предложенная методика структурного и структурно-параметрического синтеза могут быть рекомендованы для использования при создании новых машин и механизмов.
Следует отметить, что разработанный параметрический синтез звеньев шарнирного че-тырехзвенника применим только при выполнении условий теоремы Грасгофа:
-
1. Кривошип ( l 1 ) является наименьшим звеном.
-
2. Сумма длин наименьшего и наибольшего звеньев меньше суммы длин двух других звеньев.
Список литературы Структурный и параметрический синтез рычажно-винтового исполнительного механизма виброперемешивающего устройства
- Бажин, В.Т. Разработка и исследование электромагнитной мешалки/В.Т. Бажин, А.А. Литвинова//Электромагнитные машины ударного действия. 1978. С. 101-103.
- Ткаченко, Р.Н. Влияние вибрационной обработки мезги винограда Виорика на химический состав виноматериалов/Р.Н. Ткаченко, В.Т. Христюк, А.И. Смелягин//Хранение и переработка сельхозсырья. 2011. №10. С. 52-55.
- Ткаченко, Р.Н. Использование вибрационного воздействия в технологии красных вин/Р.Н. Ткаченко, В.Т. Христюк, А.И. Смелягин//Известия вузов. Пищевая технология. 2010. № 1. С. 61-64.
- А.с. 233616 СССР. Вибромешалка. 1045259/23-26; заявл. 24.12.1965; опубл. 24.12.1968, Бюл. № 3. С. 2.
- А. 582378 СССР. Диспергирующая вибромешалка. 2050117/03; заявл. 06.08.1974; опубл. 30.11.1977, Бюл. № 44. С. 2.
- Смелягин, А.И. Структура механизмов и машин. -М: Высш. шк., 2006. 304 с.
- Каримов, И.А. Теория машин и механизмов. Электронный учебный курс для студентов очной и заочной форм обучения. URL: http://www.t eormach.ru/lect8.htm (дата обращения 20.03.2013 г.)
- Смелягин, А.И. Структурный синтез и кинематический анализ простых исполнительных механизмов виброперемешивающих устройств/А.И. Смелягин, И.В. Юхневич//Омский научный вестник. 2012. № 3. С. 72-75.
- Левитский, Н.И. Теория механизмов и машин. -М.: Наука, Главная редакция физико-математической литературы, 1979. 579 с.
