Структурный синтез перемешивающих устройств с возвратно-вращательным движением рабочих органов

Автор: Приходько Александр Александрович, Смелягин Анатолий Игоревич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 4 (83) т.15, 2015 года.
Бесплатный доступ
Целью данной работы является создание перемешивающих устройств с возвратно-вращательным движением рабочих органов, так как они отличаются от других современных аппаратов более высокой интенсивностью и равномерностью перемешивания. Синтез структурных схем исполнительных механизмов проведен с помощью структурных математических моделей. В результате получены рычажные и зубчатые механизмы с одним и двумя независимыми замкнутыми контурами. Шарнирный четырехзвенник и планетарный механизм с эллиптическими зубчатыми колесами при соответствующем выборе размеров звеньев преобразуют вращательное движение в возвратно-вращательное. Применение зубчатой передачи и передачи с гибкой связью позволяет создать множество структурных схем, которые отличаются количеством рабочих органов и их расположением. На основе полученных структурных схем могут быть разработаны и спроектированы высокоэффективные перемешивающие устройства для химических, нефтехимических, пищевых производств. Преимуществом предлагаемых механизмов является то, что они образованы из известных, высоконадежных и хорошо отработанных устройств. Также рабочие органы аппаратов хорошо конфигурируются по всему объему реактора, создавая рациональный тепломассообмен.
Виброперемешивание, возвратно-вращательные перемешивающие устройства, структурный синтез, структурная математическая модель, звено, кинематическая пара, исполнительный механизм
Короткий адрес: https://sciup.org/14250174
IDR: 14250174 | УДК: 62-133 | DOI: 10.12737/16072
Structural synthesis of stirred tanks with swinging motion of impellers
The work objective is to provide stirred tanks with a swinging movement of impellers, as they differ from the other modern devices in higher intensity and uniform mixing. Synthesis of the actuator diagrams is carried out by the structural mathematical models. As a result, the leverage and gear units with one or two independent closed loop circuits are obtained. Four-bar linkage and a planetary mechanism with elliptical gearwheels under the appropriate dimensioning of the links are converting rotary mode into reciprocating rotation. The application of the gear and continuous drive allows creating a set of structural diagrams which differ in the number of impellers and their location. On the basis of the developed structural schemes, high-efficient stirrers for the chemical, petrochemical and food industries can be worked out and designed. The advantage of the proposed mechanisms is that they are developed from the known, well-established, and highly reliable devices. Besides, the impellers are well configured throughout the total reactor volume creating a rational heat-mass exchange.
Текст научной статьи Структурный синтез перемешивающих устройств с возвратно-вращательным движением рабочих органов
Введение. Перемешивание является одним из наиболее распространенных процессов химической технологии и широко применяется в различных отраслях промышленности для интенсификации тепломассообмена [1]. Современные
Машиностроение и машиноведение
Работа выполнена с использованием оборудования ЦКП «Исследовательский центр машиностроения, материаловедения, строительства и транс- портных систем».
∗∗∗ The research is done using equipment of the Common Use Centre “Centre of studies in mechanical engineering, material science, construction, and trans- portation systems.”
перемешивающие устройства можно разделить на три типа: классические вращательные аппараты, аппараты со сложным пространственным движением рабочих органов, вибрационные перемешивающие устройства.
Следует отметить, что классические вращательные перемешивающие устройства (наиболее распространенные и исследованные [2, 3]) не всегда позволяют эффективно достичь требуемого тепломассообмена.
Более современные аппараты с планетарным [4, 5] и сложным пространственным движением рабочих органов [6, 7] позволяют обеспечить высокую интенсивность тепломассообменных процессов, однако такие устройства не получили широкого распространения в промышленности. Это обусловлено прежде всего сложностью их конструкции, что приводит к затруднениям как на стадиях расчета и проектирования, так и на стадиях изготовления и эксплуатации.
В последнее время активно исследуются вибрационные перемешивающие устройства (ВПУ) [8-10]. Подбор оптимальной амплитуды и частоты колебаний рабочих органов позволяет сократить время протекания многих процессов в 1,5-2 раза, а удельные капитальные и эксплуатационные затраты — в 1,2-1,8 раза [11]. К недостаткам таких устройств следует отнести значительные вертикальные вибрации, которые передаются в окружающую среду и усложняют работу оператора, а также наличие поступательно движущегося штока, который сложно уплотнять, в результате чего ВПУ ненадежны и не могут использоваться в реакторах, работающих под давлением и с агрессивными средами. Поэтому актуальной задачей является создание перемешивающих устройств с возвратно-вращательным движением рабочих органов, которые:
-
— характеризуются отсутствием вертикальных вибраций;
-
— состоят из высоконадежных и отлаженных механизмов.
Для того чтобы создать возвратно-вращательные перемешивающие устройства, необходимо провести синтез исполнительных механизмов, которые будут преобразовывать вращательное движение в возвратно-вращательное.
Синтез проведем с использованием структурной математической модели механизмов с замкнутыми кинематическими цепями, которая, в соответствии с [12], имеет вид:
f 1 Г 2 )
-
Р = -1 Z tn t + S I ;
-
2 1 1 = T - j J
T
-
n = Z nt;
t = T - j
П - 1
W =z ip , - к П ; (1)
i = i
-
k = p - n;
П - 1
-
p = Z pt;
i = 1
-
T < к + 1 ,
где р — общее число кинематических пар; p i — число кинематических пар i-й подвижности; Т — количество вершин базового звена; t — число вершин звеньев; n — общее число подвижных звеньев; n t — число подвижных звеньев с t вершинами; к — число независимых замкнутых контуров; П — подвижность пространства, в котором синтезируется механизм; S — число присоединений к стойкам; i — целочисленный индекс; j — целочисленный индекс.
Структурный синтез исполнительных механизмов с одним рабочим органом. Чтобы устройство получилось надежным и компактным, ограничимся синтезом одноподвижных ( W = 1) механизмов с одним ( к = 1) и двумя ( к = 2) независимыми замкнутыми контурами.
Синтез механизма с одним независимым замкнутым контуром проведем при следующих условиях. Механизм должен существовать в трехподвижном пространстве ( П = 3), иметь двухвершинное базовое звено ( Т = 2) и только одноподвижные вращательные кинематические пары ( p = p 1 ). Структурная математическая модель (1) после подстановки в нее условий синтеза примет вид:
p = 2 ( 2 n 2 + S);
-
n = n 2 ;
-
j 1 = p 1 - 3 ; (2)
-
1 = p - n;
-
p = p 1 ;
-
2 < 2 .
Решение системы (2) надо искать при условии, что в синтезируемом механизме число звеньев, кинематических пар и присоединений к стойке должно быть целым и положительным. Корнями модели (2) являются следующие значения: p = p 1 = 4; n = 3; S = 2.
Из найденного решения следует, что синтезируемый механизм должен иметь: четыре одноподвижные вращательные кинематические пары (p 1 = 4); три подвижных звена ( п = 3); два присоединения к стойке ( S = 2). Найденному решению и условиям синтеза соответствует только один механизм — шарнирный четырехзвенник (рис. 1).
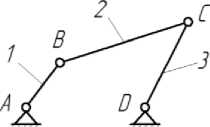
Рис. 1. Шарнирный четырехзвенник: 1 — кривошип, 2 — шатун, 3 — коромысло; A, B, C, D — кинематические пары
Итак, в качестве исполнительного механизма перемешивающего устройства может применяться шарнирный четырехзвенник, который при соответствующем выборе длин звеньев преобразует вращательное движение кривошипа 1 в возвратно-вращательное движение коромысла 3.
Синтез механизма с двумя независимыми замкнутыми контурами проведем при следующих условиях. Механизм должен существовать в трехподвижном пространстве ( П = 3), иметь трехвершинное базовое звено ( Т = 3), одно- (p 1 ) и двухподвижные (p2 ) вращательные кинематические пары. Структурная математическая модель (1) после под-
|
становки в нее условий синтеза примет вид: |
p = 1 ( 3 п 3 + 2 п 2 + S) ; 2 П = п 3 + п 2 ;
|
Целочисленными корнями модели (3) являются следующие значения:
а)pi = 1,p2 = 3,p = 4, пз = 1, П2 = 1, n = 2, S =3;
б)pi = 3,p2 = 2,p = 5, пз = 1, П2 = 2, n = 3, S =3;
в)pi = 5,p2 = 1, p = 6, пз = 1, n2 = 3, n = 4, S =3;
-
г) pi = 7, p2 = 0, p = 7, пз = 1, П2 = 4, n = 5, S =3.
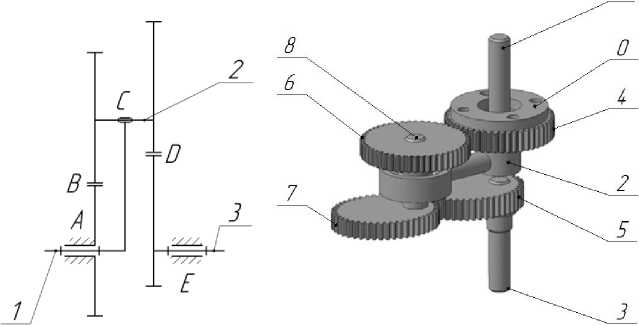
Анализ полученных решений показал, что аппарат с наиболее простой конструкцией должен иметь не более двух двухподвижных кинематических пар ( p 2 < 2 ). При этом общее число кинематических пар не должно превышать пяти ( £ pi < 5 ). Поставленному условию отвечает решение б, которому соответствует планетарный зубчатый механизм [13] (рис. 2).
а) б)
Рис. 2. Планетарный преобразователь вращательного движения в возвратно-вращательное: структурная схема (а); конструктивное исполнение (б)
Машиностроение и машиноведение
Синтезированный механизм (рис. 2, а) имеет:
— три одноподвижные ( A , C , E) и две двухподвижные кинематические пары ( B , D );
— одно трехвершинное звено (2) и два двухвершинных звена (1, 3);
— три присоединения к стойке.
Планетарный исполнительный механизм (рис. 2, б) состоит из: стойки 0; входного вала 1; водила 2; выходного вала 3; центрального круглого неподвижного колеса 4; эллиптического зубчатого колеса 5; круглого зубчатого колеса сателлита 6; эллиптического зубчатого колеса сателлита 7; вала, соединяющего колеса сателлита, 8.
В этом механизме зубчатые колеса 4 и 6 имеют одинаковые диаметры, а эллиптические зубчатые колеса 5 и 7 — одинаковые полуоси, причем межосевые расстояния пары цилиндрических и пары эллиптических колес равны. Возвратно-вращательное движение обеспечивается за счет переменного передаточного отношения пары эллиптических колес [13].
Структурный синтез исполнительных механизмов с несколькими рабочими органами. Синтезированные исполнительные механизмы перемешивающих устройств могут эффективно использоваться в реакторах малого объема, однако для использования в больших объемах промышленных реакторов нецелесообразны, так как наличие лишь одного рабочего органа приводит к образованию застойных зон. Поэтому проведем структурный синтез механизмов для передачи возвратно-вращательного движения нескольким рабочим органам.
Синтезируем одноподвижные механизмы ( W = 1) с одним ( к = 1) и двумя ( к = 2) независимыми замкнутыми контурами.
Синтез механизма с одним независимым замкнутым контуром проведем при следующих условиях. Механизм должен существовать в трехподвижном пространстве ( П = 3), иметь двухвершинное базовое звено ( Т = 2), одно- (p 1 ) и двухподвижные (p2 ) вращательные кинематические пары. Структурная математическая модель после подстановки в нее условий синтеза примет вид:
Р = 1 ( 2 n 2 + S)
n = n 2 ;
, 1 = 2 p 2 + Р 1 - 1 - 3 ; (4)
-
1 = p - n;
Р = Р 1 + Р 2 ;
-
2 > 2 .
Целочисленными корнями модели (4) являются следующие значения:
-
а) р 1 = 0, р 2 = 2, р = 2, n 2 = 1, n = 1, S = 2;
-
б) p 1 = 2, p 2 = 1, p = 3, n 2 = 2, n = 2, S = 2;
в) p 1 = 4, p 2 = 0, p = 4, n 2 = 3, n = 3, S = 2.
Структурные схемы механизмов, соответствующие найденным решениям, приведены на рис. 3.

а) б) в)
Рис. 3. Структурные схемы механизмов с одним независимым контуром: двухзвенный механизм (а), пара прямозубых колес (б), шарнирный четырехзвенник (в); 1, 2, 3 — звенья; A , B , C , D — кинематические пары
Итак, как видно из рис. 3, для передачи возвратно-вращательного движения нескольким рабочим органам может применяться только механизм соответствующий решению б — пара прямозубых колес.
Для синтеза механизма с двумя независимыми контурами примем начальные условия, сформулированные для двухконтурного преобразователя вращательного движения в возвратно-вращательное. Структурная математическая модель для этого случая примет вид (3), решением которой являются следующие значения: p 1 = 3, p2 = 2, p = 5, n3 = 1, n2 = 2, n = 3, S = 3. Найденному решению соответствует схема, представленная на рис. 4.
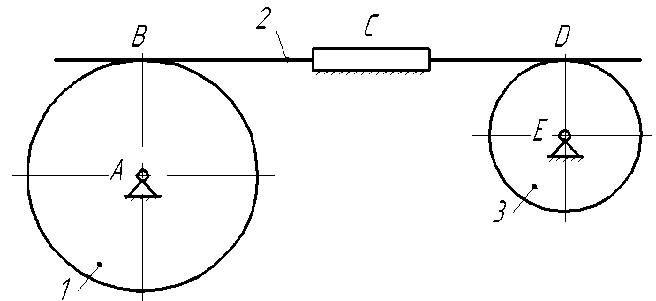
Рис. 4. Структурная схема реечной зубчатой передачи: 1, 3 — двухвершинные звенья (зубчатые колеса);
2 — трехвершинное звено (рейка); A , C, E — одноподвижные кинематические пары; B , D — двухподвижные кинематические пары
Однако в исполнительном механизме перемешивающего устройства неудобно использовать синтезированную реечную передачу, поэтому заменим ее ременной или цепной в соответствии с [12]. Применение гибкой связи дает возможность передавать возвратно-вращательное движение на значительные расстояния, что позволяет реализовать исполнительный механизм в больших объемах промышленных реакторов.
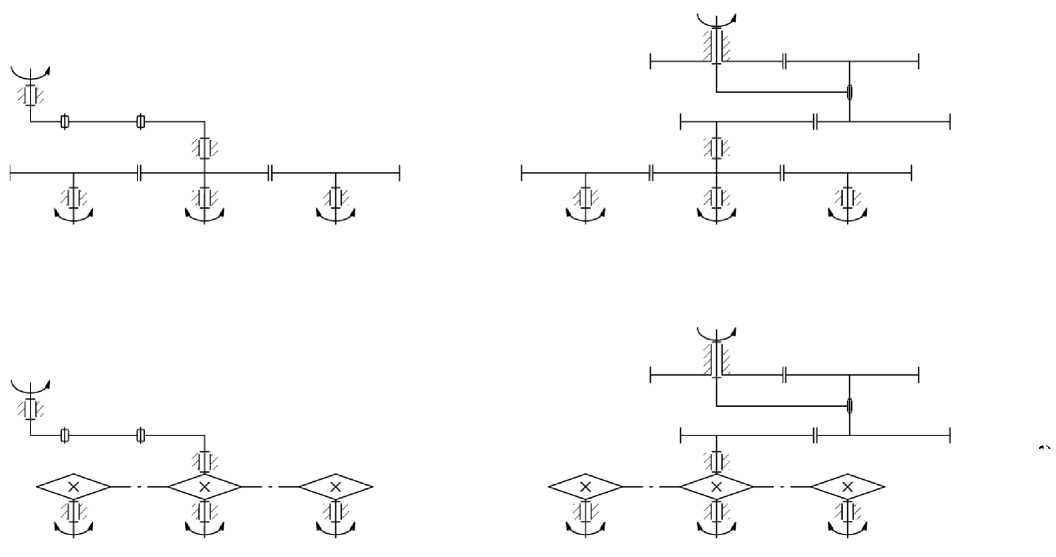
Чтобы получить исполнительные механизмы перемешивающих устройств с возвратно-вращательным движением рабочих органов, объединим синтезированные преобразователи вращательного движения в возвратновращательное и механизмы для передачи движения нескольким рабочим органам (рис. 5).
а)
б)
Рис. 5. Схемы исполнительных механизмов перемешивающих устройств с возвратно-вращательным движением рабочих органов
На рис. 5 показаны варианты схем исполнительных механизмов с одноконтурным (рис. 5, а) и двухконтурным преобразователями (рис. 5, б). Изменяя количество и расположение периферийных рабочих органов, получим исполнительные механизмы для реакторов различных форм и размеров [14].
Заключение. В работе проведен структурный синтез, который позволил найти структурные схемы исполнительных механизмов перемешивающих устройств с возвратно-вращательным движением рабочих органов. Анализ рассмотренных схем показывает, что синтезированные механизмы не имеют избыточных связей и местных степеней свободы, являются достаточно простыми и технологичными, образованы из высоконадежных и хорошо отработанных устройств. Привод таких аппаратов, в отличие от планетарных мешалок, можно разместить в отдельном корпусе вне зоны реактора [14-16], что положительно повлияет на ресурс его работы. В предлагаемых перемешивающих устройствах отсутствуют вертикальные вибрации, применяются стандартные уплотнения, а для устранения застойных зон рабочие органы располагаются равномерно по всему объему реактора.
Машиностроение и машиноведение
Список литературы Структурный синтез перемешивающих устройств с возвратно-вращательным движением рабочих органов
- Брагинский, Л. Н. Перемешивание в жидких средах: физические основы и инженерные методы расчета/Л. Н. Брагинский, В. И. Бегачев, В. М. Барабаш. -Ленинград: Химия, 1984. -336 с.
- Hemrajani, R.-R. Mechanically stirred vessels/R.-R. Hemrajani, G.-B. Tatterson//Handbook of industrial mixing: science and practice. -Hoboken: Wiley-Interscience, 2004. -P. 345-390.
- Food mixing: Principles and applications/ed. P.-J. Cullen. -Singapore: Wiley-Blackwell, 2009. -292 p.
- Dimensional analysis for planetary mixer: mixing time and Reynolds numbers/G. Delaplace //Chemical Engineering Science. -2007. -Vol. 62, is. 5. -P. 1442-1447.
- Granular flow in a planetary mixer/M.-J.-P. Hiseman //Chemical Engineering Research and Design. -2002. -Vol. 80, is. 5. -P. 432-440.
- Мудров, А. Г. Разработка пространственных перемешивающих устройств нового поколения, применяемых в сельском хозяйстве и промышленности: дис. … д-ра техн. наук/А. Г. Мудров. -Казань, 1999. -493 с.
- Устройство для перемешивания: патент 2113897 Рос. Федерация: МКИ В 28 С 5/16/А. И. Смелягин, В. Г. Сачков, Н. А. Чусовитин; Новосиб. гос. техн. ун-т. -№ 96109653; заявл. 13.05.1996; опубл. 27.10.98, Бюл. № 18. -1 с.
- Смелягин, А. И. Структурный синтез и кинематический анализ простых исполнительных механизмов виброперемешивающих устройств/А. И. Смелягин, И. В. Юхневич//Омский научный вестник. -2012. -№ 3 (113). -C. 72-75.
- Ткаченко, Р. Н. Влияние вибрационной обработки мезги винограда на химический состав виноматериалов/Р. Н. Ткаченко, В. Т. Христюк, А. И. Смелягин//Хранение и переработка сельхозсырья. -2011. -№ 10. -C. 52-55.
- Study on vibromixing for polymer solutions/C. Ibanescu //Iranian polymer journal. -1998. -Vol. 7, is. 2. -P. 129-135.
- Смелягин, А. И. Структурный и параметрический синтез исполнительных механизмов виброперемешивающих устройств/А. И. Смелягин, И. В. Юхневич//Изв. вузов. Пищевая технология. -2013. -№ 2/3. -C. 93-96.
- Смелягин, А. И. Структура механизмов и машин/А. И. Смелягин. -Москва: Высшая школа, 2006. -304 с.
- Зубчатый преобразователь вращательного движения в возвратно-вращательное: патент 2528493 Рос. Федерация: МПК F 16 H 19/08/А. И. Смелягин, И. В. Юхневич; Кубан. гос. техн. ун-т. -№ 2012135364/11; заявл. 16.08.2012; опубл. 20.09.2014, Бюл. № 26. -8 с.
- Перемешивающее устройство: заявка 2014150126 Рос. Федерация: МПК В 01 F 7/18/А. А. Приходько, А. И. Смелягин; Кубан. гос. тех. ун-т. -Заявл. 10.12.2014.
- Перемешивающее устройство: патент 2528843 Рос. Федерация: МПК F 01 F 7/18/А. А. Приходько, А. И. Смелягин; Кубан. гос. техн. ун-т. -№ 2013121535/05; заявл. 07.05.2013; опубл. 20.09.2014, Бюл. № 26. -5 с.
- Перемешивающее устройство: патент 152110 Рос. Федерация: МПК F 01 F 7/16/А. А. Приходько, А. И. Смелягин; Кубан. гос. тех. ун-т. -№ 2015103695/05; заявл. 04.02.2015; опубл. 10.05.2015, Бюл. № 13. -2 с.
