Структурный синтез устройства управления резервуарами

Автор: Джолдошов Б.О., Темиркулова Н.Т., Терентьева Е.Ю.
Журнал: Огарёв-online @ogarev-online
Статья в выпуске: 13 т.6, 2018 года.
Бесплатный доступ
В статье ставится задача синтеза системы управления при заданных инженерных требованиях к основным характеристикам системы. Оценка качества процессов управления объектами осуществляется с помощью функциональных соотношений, определяемых непосредственно по переходным процессам рассматриваемой системы.
Короткий адрес: https://sciup.org/147249530
IDR: 147249530 | УДК: 621.384.52:681.53
Текст научной статьи Структурный синтез устройства управления резервуарами
Необходимость применения резервуаров и резервуарных парков возникает на различных объектах хранения нефти и нефтепродуктов в процессе технологических операций. Резервуары и резервуарные парки являются технологическим объектами различных нефтеперекачивающих станций.
Существуют перекачивающие и промежуточные станции. На промежуточных станциях резервуары являются буферными емкостями и предназначаются для компенсации неравномерности подачи двух соседних перекачивающих станций. На перекачивающих станциях резервуарные парки предназначаются для хранения (резерва) нефти и нефтепродуктов. При некоторых плановых или аварийных остановках одной из промежуточных станций транспортируемая жидкость поступает в резервуарный парк этой станции, а следующая станция продолжает работать за счет нефти и нефтепродукта, имеющегося в ее резервуарном парке.
Резервуарный парк имеет конические виды резервуаров и является объектом со сложнейшей структурой. Управление таким резервуарным парком является интересным как в теоретическом плане, так и в практическом.
Рассмотрим задачу синтеза системы управления расходом смеси химического объекта (рис. 1), состоящего их трех конических резервуаров со свободным истечением жидкости из общего трубопровода, соединяющего выходы резервуаров [1; 2]. В резервуары жидкости поступают по двум каналам питания, при этом одна жидкость подается в первый и второй, а другая - в первый и третий резервуары. Управление уровнями жидкостей во втором и третьем резервуарах производится изменением потока жидкостей по первому ( u i ) и второму ( U 2 ) питающим трубопроводам. Расход жидкостной смеси на выходе определяется уровнем жидкости во втором резервуаре.
Рис. 1. Функциональная схема объекта управления.
Состояние объекта управления в пространстве фазовых переменных описывается следующим обыкновенным нелинейным уравнением
<
■ з a3 xi(t) =--2 f (xi - X2) + 2(U1 + U2);
n x j
■ x2 (t) = —т [ f (Xi - x2) - f (x2 - x3) - f (x2)] + —-2 nx22nx
3 a x3(t) 2 J (x2 x3) +n 2 U2);
nx32nx
U i ;
где f (x; - x}) = ^2g | x; - xi+j |sign(x - xi+J ; x1, x2, x3 - соответственно уровни жидкостей в первом, втором и третьем резервуарах, y = а2gx2 - расход жидкости на выходе объекта.
Требуется определить законы управления u 1 и и 2, обеспечивающие заданные уровни жидкостей во втором и третьем резервуарах и, следовательно, заданный расход жидкости на выходе, т.е.
x 2
= x = ;
2 r 2 ga 2
х з = х з r = y r ;
x l r 1,25 x 2 r ;
В установившемся режиме, согласно (1), выполняются следующие соотношения [1; 2]:
f (x l r - x 2 r ) = 0,5 f ( x 2 r ), af (x 2 r ) = u l r + u 2 r = У 1 r , af ( x 2 r - X 3 r ) =— 0,5u 2 r . (3)
По заданному X 2r (2) из (3) можно найти x ir - уровень жидкости в первом резервуаре в установившемся режиме работы объекта. Отличительной особенностью объекта (1) является присутствие управлений u i и U 2 во всех строках правых частей дифференциальных уравнений. Согласно [1], управление u i и U 2 всегда можно синтезировать так, чтобы обязательно обеспечить требуемые соотношения (2).
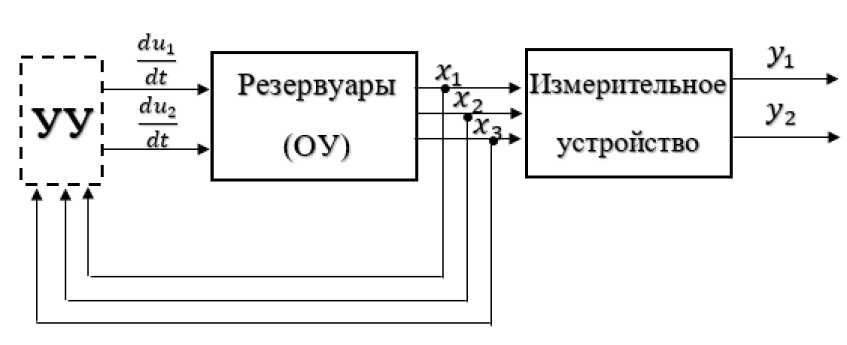
Рис. 2. Структурная схема САУ.
Рассмотрим нелинейный многомерный объект управления, состояния которого описывается следующим нелинейным векторным дифференциальным уравнением [3]:
x i (t) = f i [x(t),u(t),^ (t) Лк x i (t o ) = x io , i = 1,n, t e [t o ,t k ], (4) где: x(t) = [ x i (t),X 2 (t), ... ,X n (t) J T - вектор переменных состояния или вектор фазовых координат объекта управления; u(t) = [ u1(t),u2(t),...,um(t) J T — вектор управления (управляющих или регулирующих воздействий); f(x, u) = f(x, u, ^, t)= [ f1 (x, u, ^, t), f 2 (x, u, ^, t),...,f n (x, u, ^, t) J T - n-мерная вектор-функция, удовлетворяющая условиям Коши; ^(t)= [ ^1 (t),^ 2 (t),...,^ r (t) J T - вектор возмущающих воздействий.
Будем считать, что объект (4) является полностью управляемым и необходимо стабилизировать его нулевое состояние. Основными показателями качества регулирования будем считать динамическую и статическую точность, а также быстродействие системы управления. Обозначим через граничные положительные функции ojt), с помощью которых задаются границы допустимых областей. Переходные процессы по ошибке управления (невязки) e1 (t) определяют предъявляемые требования к качеству процессов управления синтезируемой системы. Степень достижения цели управления или
регулирования
gi(t)
характеризуется вектором невязки
e(t)=g(t) - x(t)-
Математическое описание такого инженерного критерия можно задавать на основе следующих модульных неравенств:
|xi (t)| = |e(t)| <^ (t), t G [t o, tk], i = 1,П, (6)
где q (t) — положительные, непрерывно-дифференцируемые функции, определяющие точность и быстродействие проектируемой автоматической системы.
Задача управления формулируется таким образом: для управляемого или регулируемого объекта, состояния которого описываются векторным нелинейным дифференциальным уравнением (1), необходимо определить структуру и параметры автоматического регулятора, обеспечивающего выполнение точности и быстродействия проектируемой системы, т.е. качества процесса управления.
Для достижения желаемого качества переходных процессов закон управления u(t) должен обеспечивать выполнение неравенств (6). Один из возможных путей достижения желаемого качества состоит в задании определенных условий для функций f i [x(t), u(t), ^ ( t),t] . При этом такие условия должны обеспечивать параметрическую разрешимость соотношений (2), также определение структур и параметров алгоритмов управления.
Желаемую динамику САУ зададим в виде векторного дифференциального уравнения x (t) = f * (x,p), (7)
где f * = [ f1 * (x,p1), f2 * (x,p1), _ ,fn * (x,pn) ] T - n-мерная, в общем случае нелинейная вектор-функция; Р = [pi^/^pJ — r — мерный вектор-параметр, подлежащий выбору так, чтобы решение x(t) системы (16) удовлетворяло условиям заданного качества управления (6).
В результате введения понятия желаемой динамики для проектируемой замкнутой системы, искомый закон управления u(t) целесообразно определить из условия близости соответствующих компонентов вектор-функций f(x,u) и f (x,p) с требуемой точностью. В частности, эти условия целесообразно задавать в виде модульных неравенств:
fi [ xCXuGO^t] — f* [ x(t),p]< Si (t), i = l,n, t e[to ,tk ], (8)
где 5j(t) - функции, которые задают точность приближения, они положительные и непрерывно дифференцируемые.
Таким образом, процедура синтеза регулятора для многомерного нелинейного объекта состоит из двух этапов:
-
1) описание подмножества P * и определение вектор-параметра p е P ;
-
2) нахождение закона управления u ( x , t ) , обеспечивающего выполнение условий (8). Введем функцию
F (x,u) = f (x,u,£,t) - f * (x,p), i = 1,n,(9)
Тогда неравенства (8) запишутся в виде
I Fi (x,u)^s i(t), i =1,n, t е [to,tk].
где F(x,u) = [^ (х,и),^(х,и),...,^(х,и) ] T.
Тогда уравнение динамики многомерного регулятора имеет вид [3]:
U(x,t) = L•[ Y{ f(x, u, £ , t) - f*(x,p) } - Z• f(x,u) - H• ^(t)].(11)
где Y = [yj Y2--- Yn]T ={ Yiv }nxn — вещественная матрица, составленная из n-мерных векторов
Y i = [ Y ii , Y 12 , - , Y in ] , Y 2 = [ Y 21 , Y 22 , - , Y 2n L Y n = [ Y ni , Y n2 , - , Y nn ] .
где функциональные матрицы
~ fsf ] [df ][5
z = 1 —- r , m = 1 —- f , h = 5 —- r d x. P uv P £vl/
I jnxn v > n*m I ~v J nxr а матрица Y= { Yiv }nx - вещественная матрица, составленная из настроечных параметров уу системы; в предположении что существует обратная матрица w-i = [mt • m]^.
где матрица L=W-i MT. Если вектор-функция f (x,p) задается в линейной форме, т.е.
f*(x,p) = P • x(t),(13)
где P = { pjj }nx - вещественная n x n матрица, то тогда закон управления (11) имеет вид [3]
u(x,t)= L •[ Y •{ f(x, u, £ , t) - P • x(t) } - Z • f(x,u) - H • ^(t) ].
Обобщенная структура системы управления, включающая динамический нелинейный регулятор с законом управления (14), показана на рисунке 3.
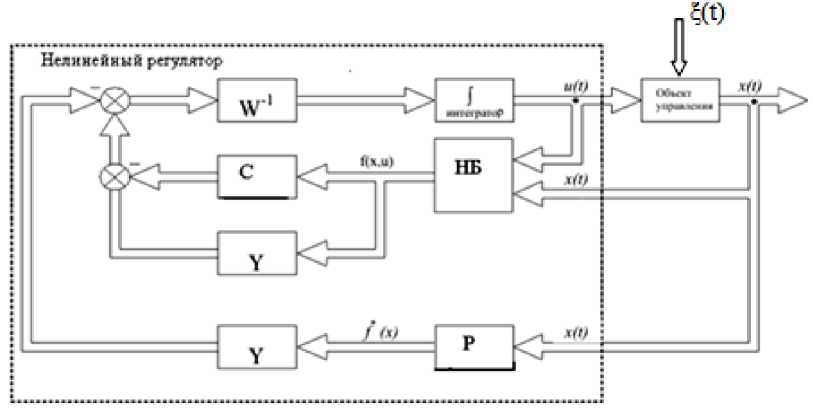
Рис. 3. Обобщенная структура САУ.
На основе прикладного пакета программирования MATLAB в автоматизированном режиме были получены алгоритмы управляющих воздействий, выведены графики уровней нефти в резервуарах, а также выходные переменные группы резервуаров. Управляющие воздействия на объект управления имеют следующий вид:
du1 =(p(x12(x1)2))+(2x22(x2)2)/(3(x1)2) - (2px22 (x2)2)/(3(x1)2))(l15)/(2px12)-l11 /(px12)l15 /(px13) - l11 dt
/(px 1 2 ) +2l 11 /(px 1 3)-l 12 /l 16 +l 15 /(2px 1 2)+l 11 /(px 1 2)(p 22 +l 14 /(px 1 2))+l 12 /l 16 +g 22 (l 15 )/(2px 1 2)-p 22 x 2 +(l 11 / (px 1 2))-(p(x 1 2(x 1 )2+2x2 2 (x 2 )2))/(3(x 1 )2 ) -(2px2 2 (x 2 )2)/(3(x 1 )2))(l 14 )/(px 1 2)+l 12 /l 16 (l 15 )/(2px 1 2)+ (l 11 /(px 1 2))+g 11 (p 11 x 1 - (3(u 1 +u 2 )) /(2px 1 2)+(l 11 /(px 1 2))-(l 15 )/(2px 1 2) - (l 11 /(px 1 2))(p 11 +l 15 )/(px 1 3) +l 14 px 12 )-2l 11 /(px 13 )+l 11 /l 16 - (2px 22 (l 15 ))/(2px 12 )+l 11 /(px 12 )((3u 1 )/(px 32 ))+(2al 11 + 2sign(x 2 -x 3 ) (l 18 )- 2sign(x 2 )(l 19 )/(px3 2 )+(3a 2sign(l 19 )+ 2sign(l 17 ) - ( 2sign(l 18 )+l 12 /(2l 17 -l 13 /l 15 +
( 2gsign(x2) sign(x2))/(2(l19))/(px22)+((3u1)/(2px22))+l11+ 2sign(x2 - x1) (l18)- 2sign(x2)
(l19)/(px22))(p33+(3a 2sign(l18)+l13/l15/(px22)))+g33((3u1)/(2px22))-p33(x3)+l11+( 2sign(x2 -x3)) (l 18 ) - 2sign(x 2 )(l 17 /(px2 2 ))-l 14 +3l 12 /(2(l 17 )((3(u 1 -u 2 ))/(2px 1 2)))-(l 11 /(px 1 2))/(px2 2 ))/3.
dU =((n(x 2 (X 1 )2 +2x 2 (x 2 )2 ))/(3(Х 1 )2 )-((2nx 2 (x 2 )2 )/(3(X i )2 )(l i5 )/(2nx 2 )-l„ /(nx 2 )(l i5 )/ (nx )-1 ,4 /(nx 2 )+(2(1 ,, ))/(nx 3 )-1 ,2 /1 16 +1 ,, /(2nx 2 )+1 ,, /(nx 2 )(p32 +L /(nx 2 )+ln /(2nx 2 (1 ,, )+ g22sign(l15 )/(2nx 2 )-p22 (x 2 )+1„ /(nx , 2 ))-(n(x 2 (x , )2 +2x 2 (x 2)2 ))/(3(x , )2 )-(2nx 2 (x 2 )2)/ (3(x , )2 (1 ,4 )/(nx 2 )+(1 ,2 )/(2nx 2 (I ,, )(1„ )/(2nx 2 )+1 ,i /(nx 2 H, /(2nx 2 И, /(nx , 2 )(p ,, +1 ,, / (nx 3 ))+1M/(nx 2 )-(2(1„)/(nx 3 ))+1 ,2 /(2nx 2 (1 ,7 Я+д^длфДх.НЛ^^ ) +1n/(nx 2 )) -(2nx 2 (1 ,5 )/(2nx 2 ))+(1„ /( nx ■ ))((3 U 1 )/(nx 2 )l( 2 (l ) +л/2si g n(x 2^ x 3) (1 18 ) -7 2sign (x 2 ) (1 ,7 )/(nx 32 )+1 ,4 +л/2 Sign (1 17 )-7 2sigД (1 18 )+1 ,2 /(21 , 7 -1 ,3 /2(1 ,8 ) + (72gSig n (X 2 )Si gn (X2 ^ (2(1 ,9 )/(nx 2 ))+((3U! )/(2nx 2 Ж , +V2 Sign (x 2 - x ) (1 ,8 )- 7 2si gn (x 2 )(1 ,9 )/(nx 2 ))( p33 +
(3a(72sign(li8 )-li3 /(2(1 )ях2 ))+g33sign((3Ui )/(2nx2 )-p33x3 +ln +/2sign(x2-x)(li8) "A/2sign(x2Xli9)/(nx2)) — 114 +G/2gsign(sign(xi — x2Xxr X2)))/(2(li7))(L)/((2nx2) - 111 /(nx2 ))/(nx 2 )/3, где l11 =(3 2asign (x1-x2) g|(x1-x2) ; l12 =(3 2agsign·sign(x2 -x3)(x2 -x3));
l13 = 2gsign(sign(x2 -x3 )(x2 -x3 )); l14 =(3 2asign (g|(x1-x2)|));
li5 =(3(ui +u2 ));li6 =(2nx2 G/gKxi-x 2 )D); li7 =^(gKxi -x 2 Ж l18= (g|(x2-x3)|);l19= (g|x2|).
Результаты моделирования продемонстрированы на рисунках 4, 5, 6, 7.
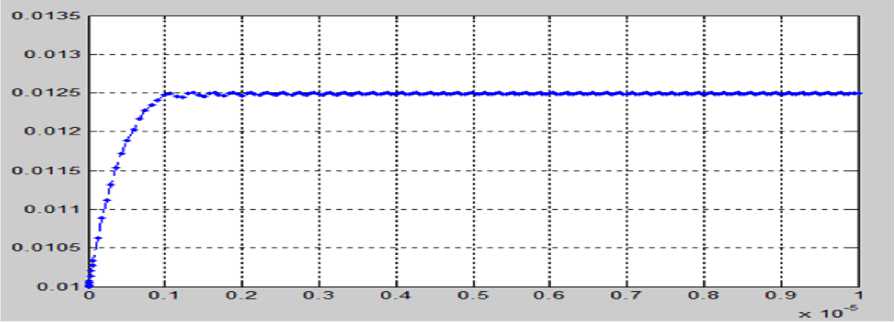
Рис. 4. Уровень жидкости 1-го резервуара x 1 =x 1 (t).
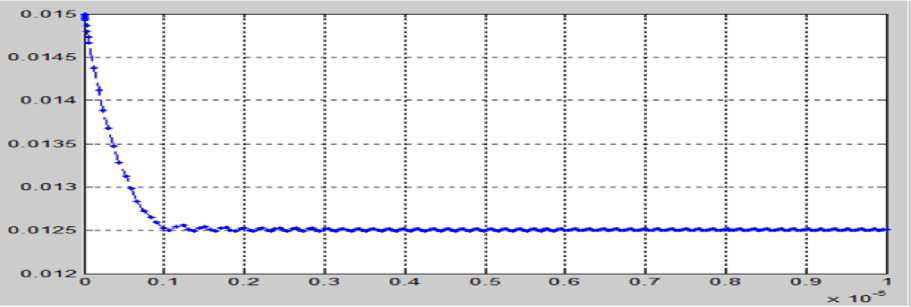
Рис. 5. Уровень жидкости 2-го резервуара x 2 =x 2 (t).
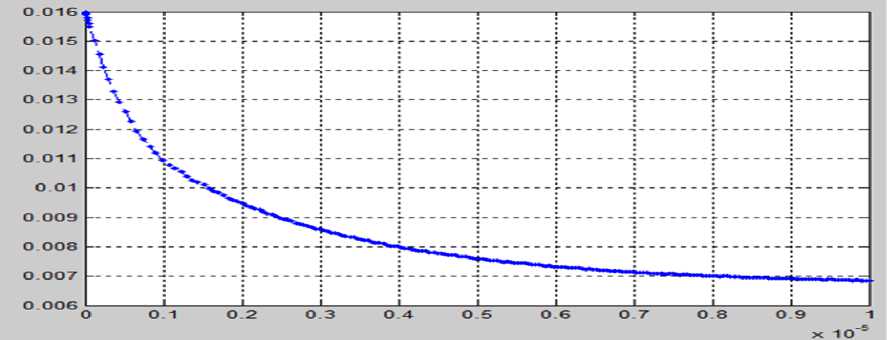
Рис. 6. Уровень жидкости 3-го резервуара X 3 =X 3 (t)
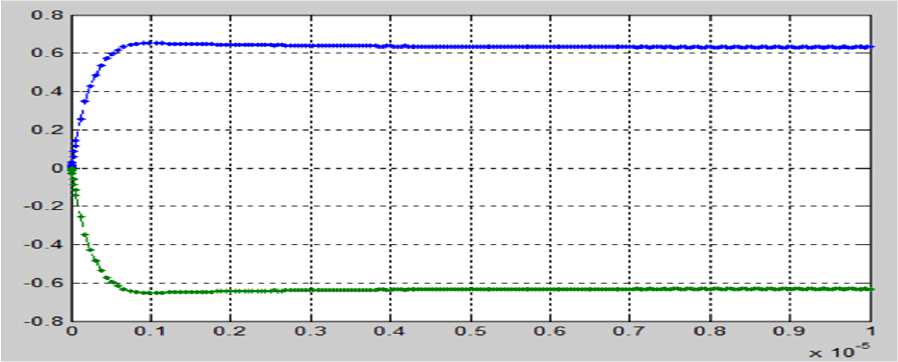
РИС. 7. ПОТОК ЖИДКОСТеЙ U 1 =U 1 (t) И U 2 =U 2 (t).
В данной статье были рассмотрены общие сведения о резервуарах, используемых в нефтегазовой промышленности. В ходе исследования нам удалось выяснить, что автоматизация конического резервуарного парка позволяет увеличить пропускную способность парка, а также повышает качество управления процессом перекачки нефти. Далее были произведены некоторые технологические расчеты.
Таким образом, был разработан алгоритм управления резервуарами на основе метода структурного синтеза, представленного в [3]. На основании постановки задачи исследования использовано математическое описание в виде системы дифференциальных уравнений для трех резервуаров [1; 2], которые описывают состояние каждого резервуара, а также разработано программное обеспечение для реализации поставленных задач.
Список литературы Структурный синтез устройства управления резервуарами
- Колесников А. А. Синергетическая теория управления. - Таганрог, 1994. - 344 с. EDN: ZIRVGR
- Keller H. Verenfacht Ljapunov - Synthese für nichtlineare Systeme // Automatisierungstechnik. - 1990. - № 3. - S. 111-113.
- Джолдошов Б. О., Темиркулова Н. Т. Динамическое проектирование управляющего устройства для нелинейной системы с учетом инженерных показателей качества // Известия КГТУ. - 2013. - № 29. - С. 196-205.
