Теоретические основы функционирования комплексного гидропривода зерноуборочных комбайнов

Автор: Гелеверов Владимир Николаевич, Дьяченко Анатолий Дмитриевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 5 (48) т.10, 2010 года.
Бесплатный доступ
Представлена обобщенная принципиальная схема комплексного гидравлического привода самоходных зерноуборочных комбайнов. Приведены теоретические основы функционирования этих приводов.
Зерноуборочный комбайн, гидравлический привод, гидравлическая мощность
Короткий адрес: https://sciup.org/14249418
IDR: 14249418 | УДК: 631.3.82.192104
Theoretical bases of combine harvester all-round hydrodrive functioning
The generalized basic scheme of an allround hydraulic drive of self-propelled combine harvesters, and theoretical bases of these drives functioning are presented.
Текст научной статьи Теоретические основы функционирования комплексного гидропривода зерноуборочных комбайнов
Введение. В концепции развития механизации уборки зерновых культур предусматривается создание полностью гидрофицированных зерноуборочных комбайнов. Решение этой задачи объективно связано с необходимостью изыскания рационального типа комплексных гидроприводов самоходных зерноуборочных комбайнов и обоснования их параметров [1].
Обоснование и расчет комплексного гидропривода зерноуборочного комбайна. Функционирование комплексного гидравлического привода современных зерноуборочных комбайнов (см. рисунок) осуществляется за счет энергии двигателя комбайна. От выходного вала двигателя энергия передается на вал гидравлического насоса, работающего в режиме генерации гидравлической энергии. При этом часть мощности двигателя расходуется на преодоление механических потерь Δ N м , а остальная часть преобразуется в гидравлическую энергию, определяемую гидравлической мощностью
N г = Q г A p , N 6 = N , 166 -A N i?
где О т — теоретический расход рабочей жидкости; Ap — перепад давления; ^ потр — потребная мощность.
Полезная гидравлическая мощность N п , отдаваемая машиной, меньше мощности N т вследствие объемных и гидравлических потерь Qn(Ap1 - A p 2 ) + Q T A p 2 . Гидравлическая мощность N т связывает подведенную мощность N потр и полезную мощность N п , т. е.
Nг - Nпогр = Nп + Qn (Ap1 - Ap2 ) + QгAp2 , где Qn — гидравлические потери; Ap1, Ap2 — потери давления соответственно на входе и выходе системы.
Первичный двигатель приводит во вращательное движение со скоростью n вал насоса, при этом на валу создается вращательный момент М кр . Гидравлический момент М г направлен навстречу моменту первичного двигателя, т. е. является тормозящим. Кроме тормозящего гидравлического момента, на валу возникает еще тормозящий момент Δ М , соответствующий мощности N 0 , которую нужно подвести к гидромашине, чтобы компенсировать потери на трение:
A M = .
2 п n
При n = const вращающий момент первичного двигателя М пр и тормозящий момент М т = М г + Δ М должны находиться во взаимном равновесии, т. е. должны быть равны по величине и противоположны по направлению:
M4& = / а + A I .
Помимо этих моментов, в случае когда n ≠ const, на валу возникает еще динамический момент сопротивления М и — приведенный к валу момент сил инерции.
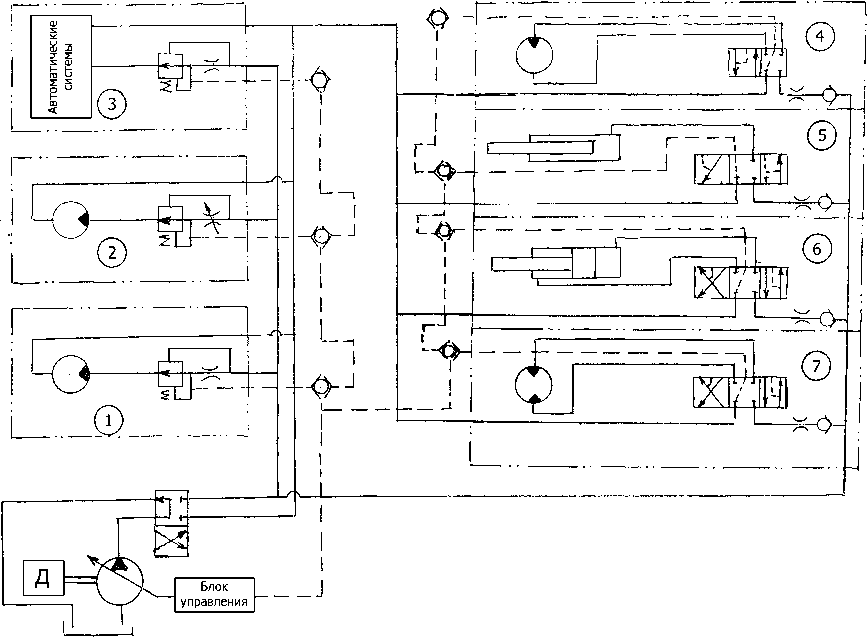
Обобщенная принципиальная схема комплексного гидравлического привода зерноуборочного комбайна:
1 — активные рабочие органы без индивидуального управления; 2 — активные рабочие органы с регулированием скорости; 3 — автоматические системы; 4 — механизмы кондиционирования;
5, 6 — механизмы позиционирования; 7 — активные рабочие органы с управлением: пуск/стоп/реверс;
Д — двигатель зерноуборочного комбайна
Динамический момент в общем случае можно выразить уравнением [2, 3]:
I e
Ì
d ( J to ) Q o d , ,
+ • (vm), dt 2nS dt при J = const и m = const
_ d to Qо m d v e dt + 2nS dt ’ где J — приведенный к валу момент инерции всех связанных с валом вращающихся масс; to — угловая скорость, to_2пn; S - полезное сечение силового цилиндра, к которому приведена dv эквивалентная масса;
dt
изменение в единицу времени скорости v перемещения эквивалентной массы m, приведенной в движение.
Динамический момент может быть положительным или отрицательным (в зависимости от увеличения или уменьшения угловой скорости), т. е. создавать на валу положительный или отрицательный момент сопротивления. С учетом динамического момента получим:
M П р _ - м т _ - ( м г + A M + м и),
М пр _ М г + А М + М и.
Из последнего уравнения моментов следует, что если момент М пр превысит момент ( М г + Δ М ), то на валу появится положительный динамический момент и скорость начнет возрастать.
Если М пр < М т + Δ М , то процесс пойдет в обратном направлении. При установившемся режиме n = const
М пр = М г + Δ М .
Последнее уравнение имеет важное практическое значение при анализе работы гидравлической машины:
М г = М 1 — Δ М , где М 1 — вращающий момент.
Для обеспечения надежной и устойчивой работы гидромашины в режиме генератора должны быть выполнены следующие условия.
Частота вращения n приводного вала должна быть больше n min , т. е. должно выполняться неравенство n > n min .
Верхний предел частоты вращения n max определяется степенью заполнения изменяемой полости гидромашины, поэтому должно выполняться условие n max > n .
Минимальная частота вращения определяется нижней границей устойчивой работы гидромашины, а максимальная — степенью заполнения изменяемой полости рабочей жидкостью, на которую при увеличении частоты вращения начинают влиять различные факторы (центробежные и инерционные силы, нарушения в работе распределительного устройства и т. д.).
В гидравлических приводах зерноуборочных комбайнов в качестве исполнительных гидравлических двигателей могут применяться гидромоторы, поворотные гидродвигатели, гидроцилиндры, а также гидравлические двигатели с возвратно-поступательным или вибрационным движением выходных звеньев.
При работе гидравлического мотора в режиме двигателя в его приемную полость подается в единицу времени фактическое количество рабочей жидкости
Q ф = Q т + Q п .
Жидкость поступает при избыточном давлении, ее гидравлическая энергия преобразуется в механическую на рабочем органе и затрачивается на преодоление сопротивлений трения. Избыточное давление на выходе гидродвигателей определяется гидравлическим сопротивлением выходной магистрали.
Гидравлический мотор развивает вращающий момент, преодолевая момент сопротивления на валу и преобразуя подводимую гидравлическую мощность в механическую.
При работе на установившемся режиме двигателя ( n = const) полная подводимая к гидродвигателю гидравлическая мощность
N подв = ( Q T + Q п )(Δ p 1 + Δ p 2 ).
Часть мощности расходуется на компенсацию объемных и гидравлических потерь
N o = Qn(Ap i — A p ? ) + 2 n n A M r.
Остальная часть преобразуется в механическую мощность:
N мех = N подв — N 0 .
Полезная механическая мощность, отдаваемая гидродвигателем, меньше механической на величину Δ N м , необходимую на покрытие потерь от трения, т. е.
N плз = N мех – Δ N м .
Подставив в это равенство значения N подв , N мех , N 0 и Δ N м , получим:
N । e ? = Q o ( A P 1 + A p 2) - 2 n n( А a + A I ) = Q q A p 1 - 2 n n A M = 2 n n ( M 1 - A M ).
В общем случае на валу гидромашины, работающей в режиме двигателя, действуют следующие моменты:
— гидравлический вращающий момент;
-
— статический момент, создаваемый статическими силами и приведенный к угловой скорости;
-
— динамический момент, который возникает при изменении скорости машины и вызывается моментами инерции всех связанных с машиной вращающихся масс.
Эти моменты могут быть реактивными и активными. Реактивные статические моменты всегда направлены навстречу вращательному моменту и, следовательно, являются тормозящими. Активные статические моменты сохраняют свой знак при изменении направления вращения вала, т. е. являются либо тормозящими, либо движущими в зависимости от направления вращения вала. Статический момент определяется свойствами машины и зависит от характера рабочего процесса, оставаясь постоянным или изменяясь во времени.
Статический момент может быть представлен в виде суммы двух моментов:
Мс = М + ΔМ, где М — момент, создаваемый внешней нагрузкой; ΔМ — момент потерь, создаваемый трением и потерями внутри машины.
Динамический момент выражается в общем случае формулой
T d Ю
M6 = J‘ ST- dt
Смотря по тому, увеличивается или уменьшается угловая скорость, динамический момент может быть положительным или отрицательным, т. е. создавать на валу машины положительный или отрицательный моменты сопротивления. На любом режиме работы моменты М1 и (Мс + Ми) должны быть равны по величине, но направлены навстречу друг к другу. Обычно имеют в виду не моменты сопротивления, а составляющие вращающего момента, каждая из которых находится в равновесии с соответствующим моментом сопротивления, т. е.
М 1 = М с + М и .
Из уравнения моментов следует, что если почему-либо момент М 1 превысит момент М с , то на валу появится положительный динамический момент и скорость вращения вала начнет возрастать. При М 1 < М с процесс пойдет в обратном направлении.
При установившемся режиме работы n = const. В этом частном случае
M 1 = M c = Δ M + M .
Выводы. Полученное уравнение моментов имеет важное практическое значение при анализе работы машины, свойства которой при работе в режиме двигателя определяются следующими характеристиками: пусковой, скоростной, моментной, регулировочной, объемным КПД, гидромеханическим и полным КПД.
Список литературы Теоретические основы функционирования комплексного гидропривода зерноуборочных комбайнов
- Концепция развития механизации уборки зерновых культур. -М.: ВИМ, 1994.
- Гурьев В.П., Погорелов В.И. Гидравлические объемные передачи. -М.; Л.: Машгиз, 1964.
- Основы теории и конструирования объемных передач/А.В. Кулагин [и др.]. -М.: Высш. шк., 1968.
- Koncepciya razvitiya mehanizacii uborki zernovyh kul'tur. -M.: VIM, 1994. -in Russian.
- Gur'ev V.P., Pogorelov V.I. Gidravlicheskie ob'emnye peredachi. -M.; L.: Mashgiz, 1964. -in Russian.
- Osnovy teorii i konstruirovaniya ob'emnyh peredach/A.V. Kulagin [i dr.]. -M.: Vyssh. shk., 1968. -in Russian.
