Теоретические основы создания малогабаритного силового оборудования и механизмов различного назначения с реверсивным термомеханизмом (РТМ) из сплава с памятью формы
 из сплава с памятью формы")
Автор: Феоктистов Василий Сергеевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Научная жизнь
Статья в выпуске: 4-1 т.16, 2014 года.
Бесплатный доступ
В данной статье разработана методика расчёта напряжений в цилиндрическом РТМ при протекании в нем термоупругого мартенситного превращения. Показана возможность использования данной методики для определения условий стабильной работы РТМ из сплава с памятью формы на примере малогабаритного высокоэффективного силового оборудования и механизмов.
Эффект памяти формы, реверсивный термомеханизм (ртм), силовое малогабаритное оборудование, механизмы
Короткий адрес: https://sciup.org/148203169
IDR: 148203169 | УДК: 669.018539.4
The theoretical bases of the producing of the miniaturized power equipment and various mechanisms with the thermo reverse gear (TRG) from the shape memory alloy
It has been developed the method of calculation of the pressures in a cylindrical TRG during the thermo elastic martensitic transformation in it. It has been shown the possibility of using of this technique to determine the conditions of stable operation of TRG from the shape memory alloy as an example of highly compact power equipment.
Текст научной статьи Теоретические основы создания малогабаритного силового оборудования и механизмов различного назначения с реверсивным термомеханизмом (РТМ) из сплава с памятью формы
В настоящее время всё более широкое практическое применение находят силовые и управляющие элементы из сплавов, обладающих эффектом памяти формы [1]. Известно, что данный эффект основан на фазовом термоупругом мартенситном превращении. Такие сплавы способны при нагреве самопроизвольно принимать одну форму, а при охлаждении другую, производя при этом работу против внешних напряжений, достигающих 600 МПа [2]. Широкие перспективы применения сплавов с памятью формы открываются при разработке оборудования, позволяющего стабильно воспроизводить перемещения, деформации и усилия. Одно из условий многоразовой работы таких устройств – термоупругость прямого и обратного превращения в материале силового элемента. Термоупругость эквивалентна требованию, согласно которому напряжения, наводимые в объёме материала, не должны превышать предела его текучести.
В статье изложены результаты исследования распределений напряжений и температур в цилиндрическом РТМ, возникающих при протекании в его объёме термоупругого мартенситного превращения.
учётом зависимости параметров материала от температуры. В силу осевой симметрии в этой области макродеформация, макронапряжения, температурное поле и параметры материала будут функциями только координаты r вдоль радиуса цилиндра и времени t . Известно [3, 4], что при термоупругом мартенситном превращении сохраняется когерентность границы образующихся фаз, а это позволяет проводить расчёт напряжений в рамках теории упругости. Таким образом, рассмотренная физическая постановка задачи эквивалентна математической модели для осесимметричной задачи термоупругости с параметрами материала, зависящими от координаты r и времени t [5].
Математическая модель поставленной задачи в цилиндрической системе координат будет состоять из уравнения равновесия r - + °г -°9 = 0,(1)
уравнений совместности деформаций r . ^Ее-Е = 0,
Е d r
= 0
.
и соотношений Коши duи
Е = — Е = — Е = —С4')
r , е , z ,х*)
dr r где и и to - радиальная и осевая компоненты вектора перемещений; е r, Ее , е z - радиальная, тангенциальная и осевая компоненты тензора деформаций; a r и (Ге - радиальная и тангенциальная компоненты тензора напряжений.
Компоненты тензоров деформаций и напряжений связаны соотношениями [3]:
Er = -1 °v°o0 +°z)]+p,(5)
E
Ee = -1 \°.^z -°.)] + p,(6)
E
Ez = °^r + oe)] + p.(7)
E где E(r,t) и v (r,t) - модуль Юнга и коэффициент Пуассона; P = E Т+ 5 — сумма температурной и структурной деформаций, о Z - осевая компонента тензора напряжений.
Полученная система уравнений (1)–(7) была решена при следующих граничных условиях:
на боковой поверхности цилиндрического РТМ
где О С =
P
^ R 2
B P
b5 (R)-b2 (R )Ьз (R) b1( R)
b 4 ( R ) - b 2 ( R )
B = 2------ b1 (R) '
b 3 ( r ) = ^T r ( 1 + 2 V 1 ( ^ )) P ( ^ ) ^ d ; , r 0
R b, (R) = -2 J E1(^X
R 0
О = 0(r = R , (8)
на торцах цилиндрического РТМ
R
Р = 2 ^ J azrdr . (9)
bU\= — f 1 + 2 v 1 ( ^^
b 5 ( r ) R J ^P ( ^ ) E 1 ( ^ } 7+ VM d ^ ,
О- ( r ) =
E 1 ( r )
1 + V 1 ( r ) L‘
b 2 ( R ) b 1 ( R ) + b 3 ( R ) b ( R ) _b (J
_E 0 ( R ) b 2 ( r ) b 1 ( R ) + b 1 ( R ) b 3 ( r ) J , (12)
Решая краевую задачу термоупругости (1)– (7) с граничными условиями (8) и (9), получаем зависимости (10)–(13) для определения распределения напряжений по сечению РТМ:
O Z = E 0
-V (r) byR + Е (r) + bl(R) J
+ P a2 (R) _ 0(r \E о1 + 2v1(r)
1 ( r ) a 1 ( R ) P ( r ) E 1 ( r ) 1 + v 1 ( r ) .
v , где V =-----, E. = Е • (1 - V2),
1 1 - v 1
b1(r ) =
1 + V 1 ( r ) E 1 ( r )
_L r 1 + V 1 Щ yr r 2 J E 1 ( i )
r
b2 (r ) = — /vEE?
r 0
£ - координата вдоль радиуса РТМ, а1 ( R ) и а2 ( R ) – константы интегрирования. Используя граничное условие (9), находим
О ( r ) = - О ( r ) + О ( r ) - E ( R ) bTrx + E ( r ^ + bR
0V ' ZV) 0 b 1 ( R ) 1 + v 1 ( r ) J b 1 ( R ) . (13)
Подставив (11) в (10), (12) и (13), получим окончательные соотношения, позволяющее рассчитывать распределение осевых, радиальных и тангециальных напряжений при заданных зависимостях E 1 ( r ), V 1 ( r ) и в( r ).
Для нахождения распределения напряжений были проведены экспериментальные исследования по определению E , v и P .
Коэффициенты линейного расширения измерялись на дилатометре. Модуль Юнга определялся динамическим резонансным методом по методике [6]. Методика измерения н изложена также в [6].
Результаты проведённых экспериментальных исследований представлены на рис. 1 и рис. 2. Значения коэффициентов линейного расширения определены экспериментально и составили 14,2·10-6 и 6,1·10-6 К-1 для высоко- и низкотемпературной фаз материала соответственно.
Расчёт напряжений, возникающих в РТМ, производился следующим образом. Рассчитывалось распределение температуры по сечению цилиндра на основании результатов работы [5]. Например, для случая нагрева силового элемента через боковую поверхность распределение температуры имеет вид:
E 0
О С + B P
B
,
qR
Т = Т +— 0 л
2at 1 ( r 2 2
—2--- 1 - 2”
R 2 4 ( R 2 J
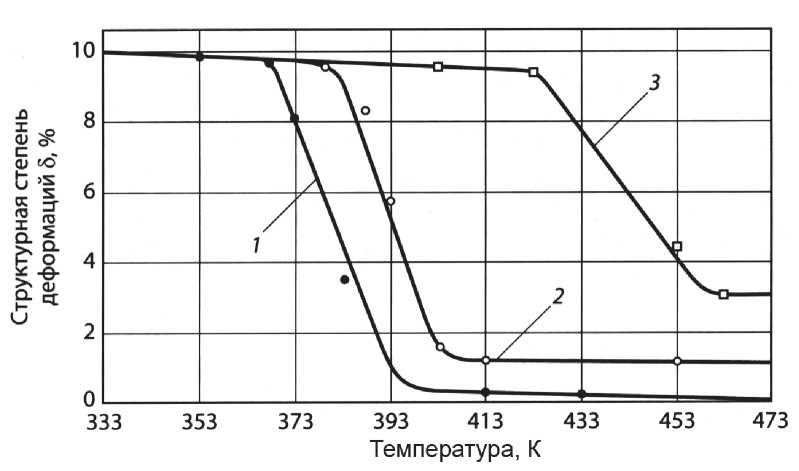
Рис. 1. Структурная деформация образца РТМ в зависимости
от температуры нагрева и напряжений ст с :
1 - ст с =0; 2 - СТ =100 МПа; 3 - СТ =300 МПа
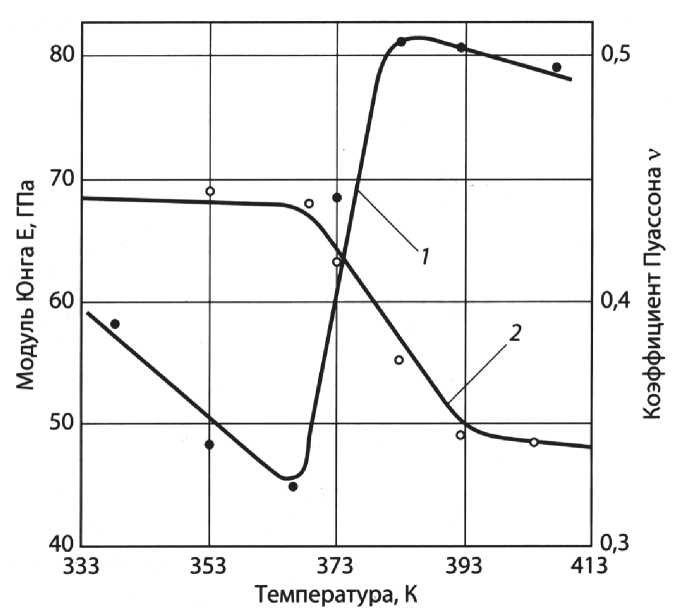
Рис. 2. Изменение модуля Юнга (1) и коэффициента Пуассона (2) образца РТМ из сплава TH-1 в зависимости от температуры нагрева К
где Т 0 – начальная температура образца, q – плотность теплового потока на поверхности образца, X и а — коэффициенты теплопроводности и температуропроводности соответственно, t – время нагрева.
По соотношению (14) и экспериментальным зависимостям (рис. 1 и 2) определялось распределение упругих постоянных по сечению цилиндра, а их полученные значения использовались для численного интегрирования по соотношениям (10)–(13). В расчётах область интегрирования разбивалась на 30 точек.
Результаты расчёта интенсивности напряжений ст i ( r ) возникающих в РТМ для различных по величине рабочих напряжений ус представлены на рис. 3. Распределение интенсивности напряжений соответствует моменту времени, при котором температура в точке r =0,2 R равна тем-
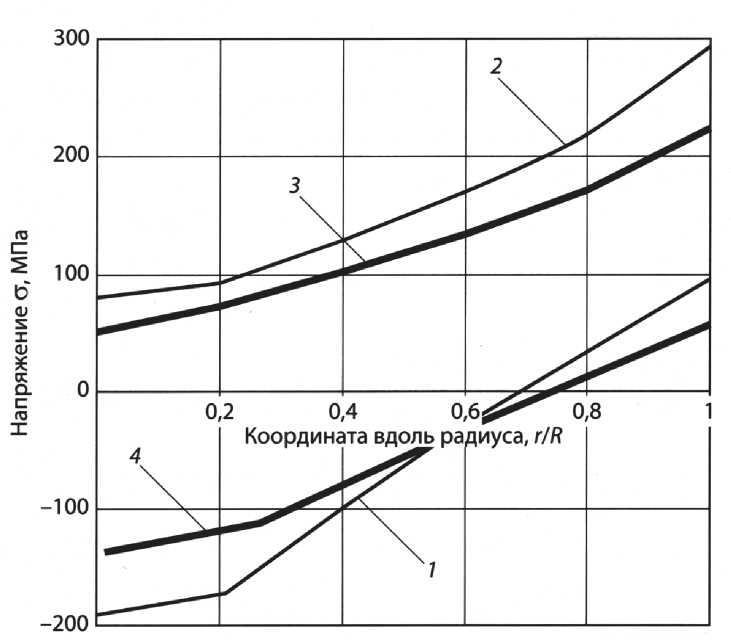
Рис. 3. Распределение интенсивности напряжений по радиусу РТМ в зависимости от внешних растягивающих (1, 2) и сжимающих (3, 4) напряжений о :
1 - о с =0; 2 - о с =200 МПа; 3 - о с =0; 4 - о =200 МПа
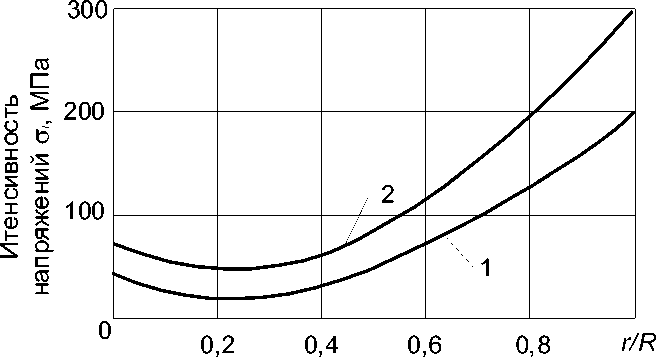
Рис. 4. Распределение напряжений по радиусу РТМ при нагреве в момент времени t = 10 с ( о c=200 МПа): 1 - тангенциальные напряжения уи, 2 - осевые напряжения о
пературе начала обратного мартенситного превращения, а температура поверхности РТМ больше этого значения на два градуса.
Исследования показали (рис. 3, 4), что при обратном мартенситном превращении в зависимости от диаметра РТМ, температурного градиента по его сечению и внешних растягивающих или сжимающих рабочих нагрузок интенсивность напряжений в РТМ изменяется в широких пределах и может достигать предела текучести материала ( о Т=320 МПа).
Кроме того, максимальными по абсолютной величине являются осевые напряжения о Z (рис. 4), причём при нагреве их максимальная величина достигается на внешней поверхности, а при охлаждении на внутренней. Поэтому при разработке оборудования для периодического многоразового использования необходимо провести по предложенной методике предварительные расчёты, устанавливающие взаимосвязь геометрических размеров РТМ с
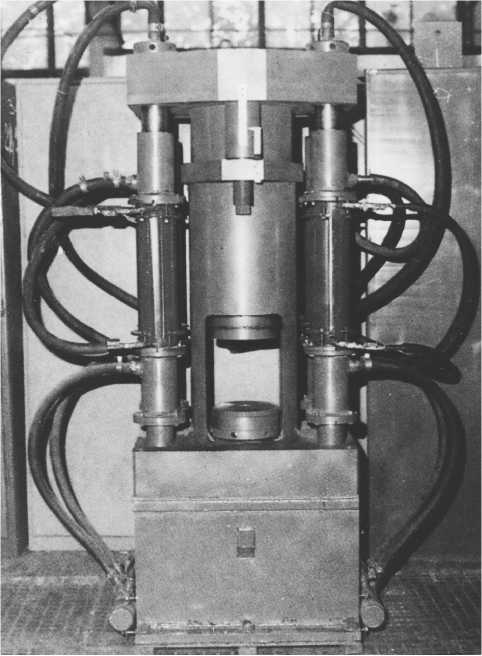
Рис. 5. Силовое оборудование с РТМ из сплава с памятью формы усилием 1000 кН максимальными развиваемыми усилиями и максимальным градиентом температуры по его сечению. Анализ результатов расчёта и экспериментов показал их хорошую сходимость. Предложенная методика была использована для разработки и изготовления оборудования с РТМ из материала с памятью формы ТН-1.
Общий вид силового оборудования - пресса для ремонтно-восстановительных работ усилием 1000 кН представлен на рис. 5, силовой замок-фиксатор – на рис. 6.
Разработанный класс силового ремонтновосстановительного оборудования и механизмов

Рис. 6. Силовой замок-фиксатор существенно меньше по габаритам и весу своих аналогов, значительно меньше потребляет электрической энергии, позволяет осуществить процесс механизации и автоматизации с наименьшими затратами, экономит производственные площади.
Преимущественная область применения данного силового оборудования –разделительные операции на листовых металлических и неметаллических материалах, формообразующие и сборочно-монтажные работы. Применение механизмов- компактные узлы и агрегаты ответственного назначения.
Список литературы Теоретические основы создания малогабаритного силового оборудования и механизмов различного назначения с реверсивным термомеханизмом (РТМ) из сплава с памятью формы
- Тихонов А.С., Герасимов А.П., Прохорова И.И. Применение эффекта памяти формы в современном машиностроении. М.: Машиностроение, 1981. 80 с.
- Корнилов И.И., Белоусов О.К., Качур Е.В. Никелид титана и другие материалы с памятью формы. М.: Наука, 1977. 180 с.
- Богачёв И.Н. Статистическое материаловедение. М.: Металлургия, 1984. 176 с.
- Хачатурян А.Г. Теория фазовых превращений и структура твёрдых растворов. М.: Наука, 1974. 384 с.
- Феоктистов В.С. Реверсивные термомеханизмы на основе материала с памятью формы. Самара.: СамНЦ РАН, 2012.117 с.
- Барвинок В.А., Богданович В.И. Определение упругих характеристик акустическим методом//Известия вузов. Машиностроение. 1980. ¹6. С. 5-7.
