Теоретический анализ взаимодействия рабочего органа при отделении отводков вегетативно размножаемых подвоев

Автор: Бросалин В.Г., Завражнов А.А., Завражнов А.И., Ланцев В.Ю., Цугленок Н.В.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Математика
Статья в выпуске: 10, 2014 года.
Бесплатный доступ
Предложены аналитические зависимости, позволяющие определить условия эффективного и качественного механизированного отделения отводков вегетативно размножаемых подвоев.
Маточники подвоев, механизация отделения отводков, ротационный дисковый нож, оптимизация
Короткий адрес: https://sciup.org/14083387
IDR: 14083387 | УДК: 631.3:
Theoretical analysis of the working body interaction in the separation of layers of the vegetatively propagated rootstocks
The analytical dependences, allowing to determine the conditions of the effective and qualitative mechanized separation of layers of the vegetatively propagated rootstocks are offered.
Текст научной статьи Теоретический анализ взаимодействия рабочего органа при отделении отводков вегетативно размножаемых подвоев
Рис. 1. Схема взаимодействия срезанного побега с диском ножа
Направление падения срезанного побега зависит от его положения на диске и соотношения действующих на побег сил. Для определения последних применим принцип Даламбера, в соответствии с которым составим уравновешенную систему сил в векторной форме
Gn + N + F + F + P + P + P + P = 0, (2)
П х у r n кх ку где GП – сила тяжести побега, Н; N – нормальная реакция диска ножа на побег, Н; Fx и Fy – проекции силы сцепления соответственно на оси х и у, Н; Pτ и Pn – тангенциальная и центробежная силы инерции переносного движения, Н; Pкх и Pку – проекции силы Кориолиса соответственно на оси х и у, Н.
В связи с тем, что разница между радиусом r 0 исходного положения точки А побега на диске и радиусом диска R пренебрежимо мала, а траектория относительного движения комля по диску близка к окружности, считаем, что комлевая точка побега движется по окружности радиуса r с тангенциальным ускорением а τ =const, и кориолисову силу в расчет не принимаем.
С учетом принятых допущений векторное уравнение (2) в проекциях на координатные оси xyz подвижной системы с началом в точке А выглядит следующим образом:
P r - F x = 0;
P - F = 0; (3)
_ N - Gn = 0.
Исходя из последнего равенства системы (3), имеем N=G П =mg , откуда
F=fmg .
Проекции силы сцепления F на осях х и у подвижной системы координат соответственно составят
F x =fmg∙ cos β ; F y =fmg∙ sin β , (5)
где β – угол между осью х и направлением силы F .
Из второго уравнения системы (3) получим Pn=Fy или тоПr = fmg sin в. В начальный момент времени (t=0) шп=0, то есть топr = 0. При этих условиях fmg sin в = 0 только в том случае, если sin в = 0, то есть в=0о. В то же время из первого уравнения системы (3) видно, что Pt=Fx или maτ=fmg∙cosβ. Так как β=0о, то cos β=1 и следовательно aτ=fg.(6)
Величина угловой скорости точки А побега в переносном движении определяется выражением
ωП=ωПо+εt,(7)
где ω П о – начальная угловая скорость побега, рад; t – время отсчета, с; ε – угловое ускорение, с-1
a
£ = —.(8)
r
Известно, что в относительном движении по диску ножа основание побега (точка А ) перемещается по траектории в виде логарифмической спирали [2], уравнение которой [3]
R=r e aθ ,
где r и θ – текущие полярные координаты; a =ctgα=const; α – угол между касательной к спирали и радиусом r , близкий к прямому [2]; е – основание натурального логарифма.
Таким образом, с момента касания до момента схода побега с диска в относительном движении основание побега переместится по диску на угол n ln( R / Г0 ) O =------
a где R – радиус диска ножа, м; r0 – радиус точки исходного касания торца побега после среза, м.
При равнопеременном движении путь, пройденный телом за время t, составляет
a t2
S = S0 + Л01 +—|—, где Sо - начальная точка отсчета, м; Л - начальная скорость, м/с. С учетом начальных условий (Sо=О, Ло=0), принятых ранее допущений (rо®R=r) и равенства (6) получим: вначале S = Or = (a .12.) / 2, а затем
tex = 42Or/fg ,
где t сх – время с момента касания побегом диска ножа до его схода, с.
За это же время диск перенесет побег в направлении своего вращения на угол ф = ф 0 + О 0 1 + £ t 2 /2 , где ф о - начальная точка отсчета, рад; ш о - начальная угловая скорость, с-1; ε – угловое ускорение, с-2 ( ε=а τ /r=fg/r ). С учетом начальных условий ( φ 0 =0, ω 0 =0) и равенства (8) имеем
ф=Q=HR/r) a
где φ – угол схода побега с диска, рад.
= a , ta = 4 2 fgQ
, а угловая составляет
При этом линейная скорость схода Р сх
v. = 42 fgQ / r.
Дифференциальные уравнения вращения срезанного побега относительно осей х и у имеют вид
Jx= SMx(Pi); Jy= ZMy(Pi), (14)dt dt
Ю р х и Ю р y - угловые скорости
где J x и J y – моменты инерции ствола относительно осей х и у , Н∙м2;
^ M x (P i ) и ^ My ( P i ) - алгебра-
вращения побега относительно осей х и у соответственно, с-1;
ические суммы моментов всех действующих на побег сил относительно осей х и у , Н∙м.
Ориентируясь на данные таблицы и рисунка 2, полученные на основе измерений, проведенных в 2010 году научным сотрудником ВНИИС им. И.В. Мичурина, кандидатом сельскохозяйственных наук Е.А. Капли-ным, считаем
т т 3 ml2
J = J =--- C
,
x y 2
где l C =l/ 3 – расстояние от осей поворота до центра тяжести побега, м; l – длина побега, м; m – масса побега, кг.
Параметры отводков клоновых подвоев 62-396 и 54-118
|
Параметр |
Вариационные показатели |
||||
|
М , см |
σ , см |
m , см |
Р , % |
V , % |
|
|
Подвой 62-396 |
|||||
|
Высота побега l |
61,49 |
17,72 |
1,87 |
3,04 |
28,82 |
|
Высота центра тяжести l C |
16,88 |
5,39 |
0,57 |
3,37 |
31,94 |
|
Отношение l C /l |
0,276 |
0,04 |
0,005 |
1,73 |
16,2 |
|
Подвой 54-118 |
|||||
|
Высота побега l |
80,64 |
27,66 |
2,92 |
3,62 |
34,29 |
|
Высота центра тяжести l C |
27,17 |
8,08 |
0,85 |
3,13 |
29,73 |
|
Отношение l C /l |
0,345 |
0,047 |
0,005 |
1,43 |
13,6 |
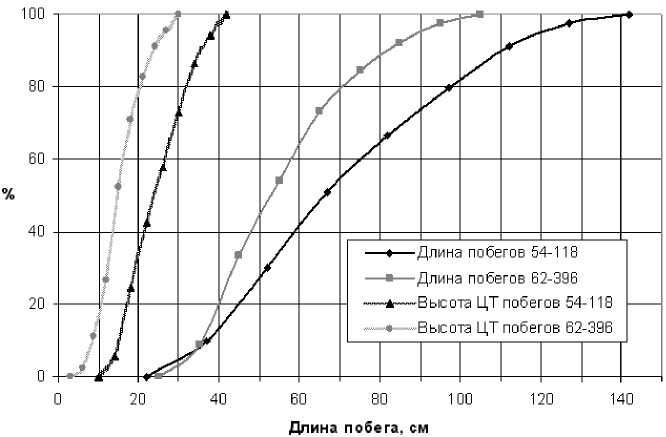
Рис. 2. Интегральные кривые распределения длины побегов и расстояния до центра тяжести
Принимая во внимание (15) и обозначения рисунка 1, имеем: относительно оси х
|
3 ml 2 d a epx ----p— — PL, cos y + GL sin Y ■ (16) n C x C x ; ( ) 2 dt |
|
|
относительно оси у |
3ml 2 da m вр^ — PL cos y + GL sin y (17) 2 dt n C y C y . (17) |
Так как G п =mg, P n — m a nГ и PТ=mfg, после замены в (16) и (17) и некоторых преобразований получим:
da
вр х
dt
da
вр y
dt
-
— 2г (®П r cos Yx + g sin Yx), 3lC
-
— 2- g(fcos Yy + sin Yy).3lC
Перед интегрированием (18) и (19) умножим почленно их левые и правые части на dγ и, учитывая, что dγ∙dω вр / dt=ω вр ∙dω вр , получим:
а врх 2 Y x /
[a da ——f(a2rcosy + gsinY )dY врх врх П x x x ,
0 3l 0
C 0
a epy
[ a da
вр y вр y
Q Yy /
— Tg J(f cos Yy + sin Yy ^Yy.3lC 0
Интегрирование (20) и (21) с учетом того, что 1= 3lc (или lC = 31), приводит к следующим уравнени- ям:
а вр х
4 [фП г sin Yx + g (1-
,
а вр y
.
Геометрическое сложение векторов О врх и Ф вр у дает вектор О вр абсолютной угловой скорости вращения побега относительно его мгновенной оси вращения
а = Оврх + авру.
При этом плоскость вращения побега расположена перпендикулярно его мгновенной оси вращения и отклонена от оси х на угол
^ = arctg
а
вр х
а
вр у
,
где μ – угол плоскости падения побега в относительном движении, рад.
Фактически, с учетом угла схода φ побега с диска, вычисленного по уравнению (12) (рис. 3), сектор падения срезанного побега смещен в сторону вращения дискового ножа.
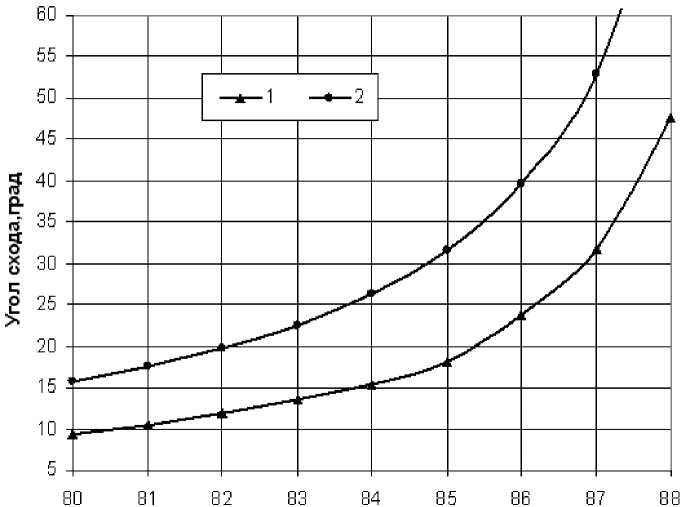
Постоянная траектории, град
Рис. 3. Расчетный угол схода побегов с диска ножа при R/r 0 , равном: 1 – 1,05; 2 – 1,03
Выводы. Таким образом, теоретический анализ взаимодействия срезанного побега с дисковым ножом показывает, что единичный побег неизбежно упадет в направлении движения машины. Только побеги, срезанные одной наружной боковой кромкой ножа, расположенной по касательной к линии ряда единичных побегов с линейной скоростью режущей кромки, направленной против хода машины, могут избежать повторных воздействий ножа и травмирования. В иных случаях необходимы дополнительные устройства, обеспечивающие отвод побегов после их отделения от маточного растения.
