Теоретическое моделирование работы атомно-силового микроскопа при исследовании поверхностей со сложной наноструктурой

Автор: Гаришин Олег Константинович, Лебедев Сергей Николаевич
Статья в выпуске: 1, 2013 года.
Бесплатный доступ
Стандартное математическое обеспечение, поставляемое для расшифровки результатов атомно-силового сканирования (АСМ), базируется в основном на моделях, использующих классическое решение задачи Герца о контакте двух линейно-упругих сфер (или сферы и плоского полупространства, если одна из них имеет бесконечно большой радиус). В большинстве случаев этого вполне достаточно. Однако существуют такие ситуации, когда решение Герца следует применять с большой осторожностью. Теоретическому исследованию этих вариантов и посвящена данная работа. Представлены результаты численного моделирования контактного взаимодействия зонда атомно-силового микроскопа и поверхности со сложной наноструктурой. Исследования вели для двух типов материалов: 1) упругая анизотропная среда (зубная эмаль); 2) нелинейно-упругий конечно-деформируемый полимер. Это два класса материалов, которые принципиально различаются по своему механическому поведению. Соответственно, для правильной расшифровки экспериментальных данных требуются разные теоретические модели. Для материалов первого типа решена задача внедрения зонда АСМ в трансверсально-изотропную упругую поверхность. Построены расчетные зависимости силы реакции на инденторе от глубины вдавливания и степени анизотропии материала. Для материалов второго типа (эластомеров) проведено компьютерное моделирование контактного взаимодействия зонда АСМ с эластомерными нанотяжами, которые могут образовываться в полимере в вершине трещины. Тяж представлялся в виде длинной продольной выпуклости, лежащей на плоской упругой поверхности. Задача решалась в трехмерной постановке.
Атомно-силовая микроскопия, наноиндентирование, анизотропная наноструктура, полимерные нанотяжи
Короткий адрес: https://sciup.org/146211466
IDR: 146211466 | УДК: 539.311
Theoretical modeling of atomic force microscopy in the study of surfaces with complex nanostructures
Standard software supplied to decrypt the atomic force scanning (AFM), based mainly on the models using a classical solution of the Hertz contact of two linearly elastic spheres (or a sphere and a flat half, if one of them has infinite radius). In most cases this is enough. However, there are situations where the Hertz solution should be used with great caution. This work is devoted to the theoretical study of these versions. The results of numerical modeling of contact interaction of the probe of an atomic force microscope and the surface with complex nanostructure are presented. Research was conducted for two types of materials: 1) anisotropic elastic medium (tooth enamel), 2) non-linear elastic finite deformable polymer. These are two classes of materials that are fundamentally different in their mechanical behavior. Respectively different theoretical models are needed for the correct interpretation of experimental data. The problem indentation an AFM probe in a transversally isotropic elastic surface is solved for the materials of the first type. Computational dependencies of reaction force in the probe on the depth of indentation and the degree of anisotropy of the material is built. Computer modeling of AFM probe contact interaction with elastomeric nano strands, which can be formed in the polymer at the crack tip, are carried out for the materials of the second type (elastomers). nanostrand is represented as a long longitudinal convexity, lying on a flat elastic surface. The problem was solved in a three-dimensional formulation.
Текст научной статьи Теоретическое моделирование работы атомно-силового микроскопа при исследовании поверхностей со сложной наноструктурой
Создание новых наноструктурированных материалов невозможно без серьезных исследований их внутреннего строения на наномас-штабном уровне (т.е. когда уже надо учитывать эффекты, связанные с особенностями молекулярного строения вещества, хотя сам материал еще можно считать сплошной средой). На сегодняшний день одним из наиболее перспективных инструментов для таких исследований является атомно-силовая микроскопия (АСМ). Ее основное преимущество по сравнению с традиционной электронной микроскопией состоит в том, что атомно-силовой микроскоп позволяет получать информацию не только о топологии внутреннего строения материала, но и о его локальных физических свойствах (которые могут значительно отличаться от макроскопических характеристик) [1-4].
АСМ успешно применяют при измерении упругого модуля [5], параметров упрочнения [6], ползучести [7] и т.д. на уровне наноструктуры. Атомно-силовой микроскоп позволяет непосредственно наблюдать такие микропроцессы, как появление дислокаций, возникновение сдвиговой нестабильности, фазовые переходы и многие другие явления, недоступные для ранее известных технологий [8].
Основным элементом атомно-силового микроскопа является кантилевер в виде консольной стальной балки с кремниевым щупом на свободном конце (рис. 1). Как правило, этот щуп (зонд) имеет форму конуса со скругленной вершиной. Длина балки составляет примерно 100-200 мкм, высота конуса 1-3 мкм. Радиус вершины зонда (который и определяет разрешающую способность прибора) у современных кантилеверов варьируется от 10 до 50 нм.
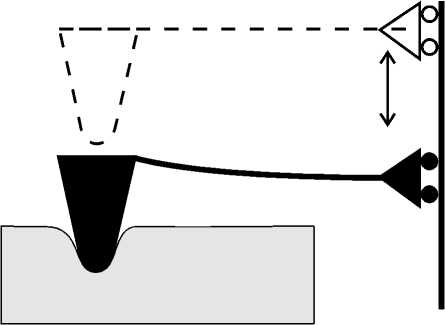
Рис. 1. Принципиальная схема работы атомно-силового микроскопа
При работе атомно-силового микроскопа острие зонда находится в непосредственном соприкосновении с поверхностью (силовая мода), при этом силы притяжения и отталкивания со стороны образца уравновешиваются силой упругости консоли - кантилевера. Зонд монотонно вдавливается в исследуемую поверхность, в результате чего балка кантилевера изгибается.
В процессе эксперимента зонд АСМ сканирует выбранную поверхность образца. Получаемые при этом данные представляют собой зависимости между координатами точек сканирования, силой реакции F , действующей на зонд, и глубиной проникновения вершины щупа в исследуемый материал и [9-10]. Эти результаты сами по себе (без дополнительных знаний о предмете исследований) малоинформативны, поэтому требуется их дальнейшая теоретическая расшифровка с привлечением различных физических и механических моделей.
Стандартное математическое обеспечение, поставляемое для расшифровки результатов атомно-силового сканирования (АСМ), базируется в основном на моделях, использующих классическое решение задачи Герца о контакте двух линейно-упругих сфер (или сферы и плоского полупространства, если одна из них имеет бесконечно большой радиус). В большинстве случаев этого вполне достаточно. Однако существуют такие ситуации, когда решение Герца следует применять с большой осторожностью. Например: 1) очень «мягкие» материалы, когда зонд АСМ проваливается в образец на большую глубину; 2) зонд и материал контактируют не по нормали, а под углом; 3) поверхность образца содержит микронеровности (полости, каверны и т.д.), соизмеримые с радиусом вершины щупа. Теоретическому исследованию этих вариантов и посвящена данная работа.
Механическую реакцию от взаимодействия зонда АСМ и поверхности образца определяли из решения контактной краевой задачи о вдавливании жесткого конуса со скругленной вершиной в более мягкую поверхность заданной формы (не обязательно плоскую). Искомое решение искали численно - методом конечных элементов (как в линейной, так и в нелинейно-упругой постановке). В результате получали зависимости силы упругой реакции от механических свойств материала образца и геометрических характеристик зонда: радиуса вершины R и угла раствора конуса а.
Сначала было проведено сравнение решения о перпендикулярном вдавливании зонда АСМ в плоскую нелинейно-упругую поверхность (неогук) с классической задачей Герца о контакте двух линейно-упругих сфер [11]. Формула Герца, определяющая усилие реакции F Hertz для случая, когда одна из сфер имеет бесконечно большой радиус (т.е. контакт с плоским полупространством), а вторая является абсолютно жесткой, имеет вид
Hertz
4 E s R 1/2
" 3(1 -v 2 )
и 3/2,
где Es - начальный модуль Юнга образца; v s - коэффициент Пуассона (везде далее: индекс « s » означает, что данный параметр относится к образцу). Для случая нелинейно-упругой контактной задачи аналогичная зависимость имеет вид
/ \ 1.3 р / \1.3
F = 8,6 CR 2 1 u I = 8,6---- s— R 2 1 u I ,
s IR) 4(1 + v 5) IRJ где Cs - неогуковая упругая постоянная. Для несжимаемой среды vs = 0,5, тогда Cs соотносится с начальным модулем Юнга, как Es = 6Cs. На рис. 2 представлены зависимости силы реакции F, действующей на зонд от глубины его проникновения в материал и, рассчитанные по формуле Герца и численно («неогуковый» материал, а = 40°). Из графиков видно, что расхождение формулы (1) с нелинейно-упругим решением начинается при и/R > 0,4 (причем нелинейно-упругое решение лежит ниже). При меньших значениях ее вполне можно использовать.
На рис. 3 представлена зависимость высоты шаровой части зонда h в долях радиуса скругления вершины R от угла раствора конической части a: h = R (1-sin(a/2)). Анализируя данные рис. 2 и 3, сделаем вывод, что, пока в поверхность погружена шаровая часть вершины зонда, расхождение невелико. При дальнейшем углублении оно начинает быстро нарастать.
Следует отметить, что в зависимости от механических свойств, испытываемых на АСМ материалов, используются различные зонды с различными геометрическими характеристиками, что, конечно, должно сказываться на процессе наноиндентации. При определении зависимости F от a значения аргумента варьировали от 0 (цилиндрический зонд со скругленной вершиной радиусом R ) до 90°. Полученные зависимости представлены на рис. 4.
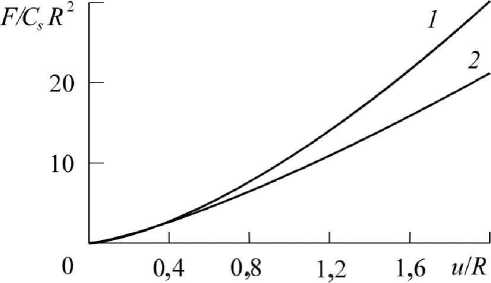
Рис. 2. Зависимости силы реакции F , действующей на зонд, от глубины его проникновения в материал и : 1 - формула Герца; 2 - численное нелинейно-упругое решение (неогук)
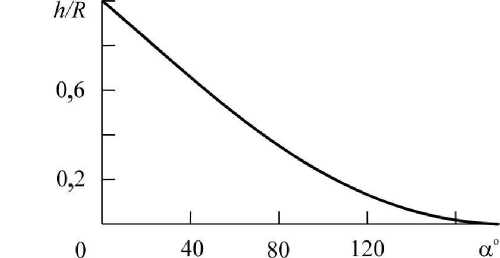
Рис. 3. Зависимость высоты сферического сегмента зонда АСМ от угла раствора конуса a
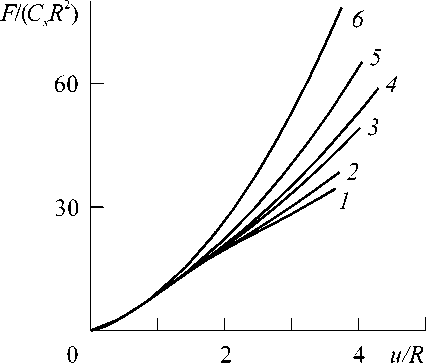
Рис. 4. Зависимость силы реакции зонда ACM F от глубины внедрения в образец и и угла а: 1 - а=0°;
2 - 12°; 3 - 30°; 4 - 38°; 5 - 56°; 6 - 90°
Расчеты показали, что величина угла раствора конуса зонда начинает существенно влиять на силу реакции, когда глубина внедрения зонда в образец достигает значений 3-4 R , то есть этот фактор надо обязательно учитывать при описании больших деформаций в зоне контакта. Так при погружении зонда на глубину в 4 R , F (а = 90°) более чем в два раза превышает F(а = 0°).
Моделирование процессов, происходящих при контакте зонда атомно-силового микроскопа с поверхностью, вели для двух основных типов материалов: 1) упругая хрупко разрушаемая при взаимодействии с зондом среда (зубная эмаль); 2) нелинейно-упругий конечно-дефор-мируемый полимер. Это два класса материалов, которые принципиально различаются по своему механическому поведению. Соответственно, для правильной расшифровки экспериментальных данных требуются разные теоретические модели.
Известно, что зубная эмаль это сложная структурно неоднородная среда, состоящая из параллельных длинных и хрупких призм с характерным поперечным размером от 2 до 8 мкм. Как правило, эти призмы направлены перпендикулярно к рабочей поверхности зуба и достаточно прочно скреплены между собой по боковым сторонам прослойками соединительной ткани [12-13]. Такой материал должен обладать анизотропными свойствами. С точки зрения механики сплошных сред зубную эмаль можно рассматривать как трансверсальноизотропное тело, в котором жесткость в перпендикулярном к поверх- ности направлении отлична от тангенциальной жесткости, причем в трансверсальном направлении жесткость должна быть ниже.
Контактную задачу о внедрении жесткого зонда в трансверсально изотропную среду решали методом конечных элементов в осесимметричной постановке в рамках линейной теории упругости. Считали, что в перпендикулярном к поверхности направлении z упругий модуль Юнга равен Ez , а в трансверсальной плоскости E r = E 0. Причем E r всегда меньше или равен Ez . Коэффициенты Пуассона выбирали так, чтобы удовлетворить стандартным условиям для «инженерных» констант, обеспечивающим «физичность» решения задачи для трансверсально-изотропной среды (неотрицательная упругая энергия при произвольном способе нагружения) [14]. При расчетах коэффициенты v у для анизотропного случая брали равными соответственно: v rz = v z 0 = 0,03, v r 0 = 0,3 (при изотропии v ij = v s = 0,3).
Были проведены модельные исследования по вдавливанию различающихся по геометрии зондов АСМ в трансверсально-изотропный материал с разной степенью анизотропии. Соотношение Er/Ez варьировали от 0,1 до 1 (изотропный случай, кривая совпадает с решением Герца). Угол раствора конуса индентора а брали равным 30°, 40°, 60° и 90°. Полученные зависимости представлены на рис. 5. Так как глубина внедрения относительно невелика - меньше или близко от высоты шаровой части зонда (см. рис. 3), то параметр а практически не сказывается на усилии. Все кривые с одинаковыми а практически совпали. Расчеты показали, что чем выше анизотропия, тем слабее материал сопротивляется внедрению щупа.
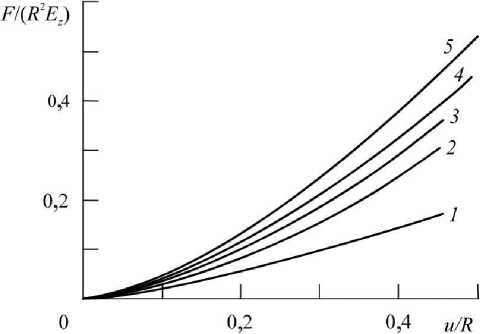
Рис. 5. Внедрение зонда в анизотропную поверхность: 1 - E r /E z = 0,1; 2 - 0,3; 3 - 0,5; 4 - 0,7; 5 - 1,0; а = 30, 40°, 60°, 90°
Полученные данные позволяют сделать вывод, что анизотропия поверхности может очень существенно сказываться на силе реакции F , и для правильной адекватной расшифровки полученных при АСМ-сканировании данных следует с большой осторожностью использовать стандартные модели, основанные на решении Герца.
В работе [15] представлены результаты экспериментальных АСМ-исследований наноструктуры эластомеров и эластомерных нанокомпозитов в предразрывном состоянии. Испытывались изопреновые каучуки СКИ-3, содержащие 30 и 50 массовых частей технического углерода марки N220.
Было установлено, что в области формирования разрыва (вершине трещины) можно наблюдать образование волокон-тяжей с отличными от основного материала механическими свойствами. Как правило, тяжи ориентированы в перпендикулярном к направлению разрыва направлении. С помощью атомно-силовой микроскопии были определены характерные средние диаметр и длина волокон, составившие порядка 80 нм и 800-1000 нм соответственно.
Проведенный по экспериментальным данным расчет приведенного модуля упругости тяжей по ставшей уже стандартной модели Деря-гина-Мюллера-Торопова, (решение Герца + дополнительный член, учитывающий адгезионное взаимодействие зонда с поверхностью) [17-18] показал, что жесткость волокон примерно в три раза выше, чем у остальной матрицы. Объяснить это можно тем, что полимер в тяжах находится в высокоориентированном состоянии (но тогда, как показывают проведенные в литературе оценки [19], жесткость должна быть еще выше, причем намного). Проблема усугубляется еще и тем, что основанная на решении Герца ДМТ-модель предполагает взаимодействие зонда с плоской поверхностью только в перпендикулярном к направлению внедрения направлении. Понятно, что данное условие в случае контакта с тяжем не выполняется.
Для оценки этих факторов были проведены модельные исследования контактного взаимодействия зонда АСМ и тяжа в виде длинной «гребнеобразной» выпуклости на плоской поверхности (поперечное сечение имело вид треугольника со скругленной верхней вершиной). Расчетная схема показана на рис. 6.
Высоту «гребня» h s брали равной 5 радиусам вершины зонда R , а ширину основания b s варьировали от 5 до 20 R . Радиус скругления вершины «гребня» R s задавали от 1,25 до 15 R . Материал образца считали неогуковым. Задачу решали в SD-постановке методом конечных элементов.
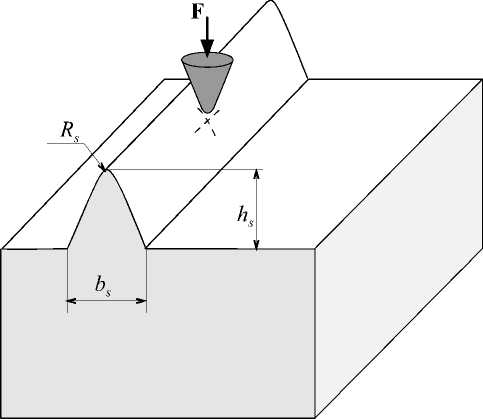
Рис. 6. Расчетная схема по моделированию контакта зонда АСМ и полимерного нанотяжа в виде «гребня»
Рассматривалось три варианта приложения точки контакта: а) в вершину гребня, б) в боковую поверхность, в) в основание выпуклости. В результате проведенных расчетов было установлено, что в случае «узкого» гребня (основание выпуклости составляет порядка 5-10 R ) происходит его «прогиб» в горизонтальном направлении при воздействии зонда на боковую поверхность выпуклости, что, конечно, сильно сказывается на силе реакции на кантилевере F . Так, для выпуклости с основанием, равным 5 R , происходило более чем десятикратное падение силы F при контакте зонда с боковой поверхностью. На рис. 7 показаны зависимости упругой силы реакции зонда на вмятие в различные участки «узкого» тяжа (высота и основание равны 5 R , радиусом R s — 1,25 R ).
На рис. 8 показаны аналогичные зависимости для «широкого» тяжа: h s = 5 R , b s = 20 R , R s = 15 R . На графиках видно, что разброс кривых F ( и ) для разных точек контакта все равно присутствует, хотя и стал значительно меньше (нет горизонтального смещения «гребня»).
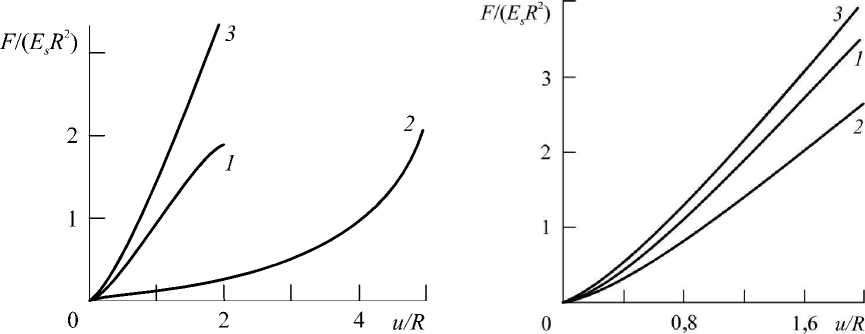
Рис. 7. Внедрение зонда АСМ в «узкий» Рис. 8. Внедрение зонда АСМ в «широкий» тяж: 1 - в вершину «гребня»; 2 - в середину тяж: 1 - в вершину «гребня»; 2 - в середину склона; 3 - в основание гребня склона; 3 - в основание гребня
Приведенные результаты свидетельствуют о том, что проблема взаимодействия зонда АСМ и полимерного нанотяжа требует более тщательного и всестороннего исследования. Стандартные методы атомно-силовой микроскопии в этом случае нуждаются в существенном уточнении. Такие исследования планируется провести в следующем году. Для этого будут решены в 3D-постановке контактные краевые задачи с реальной геометрией тяжа и различными граничными условиями (тяж находится в свободном пространстве, тяж лежит на поверхности матрицы, тяж углублен в поверхность матрицы, тяж предварительно растянут и т.д.).
Работа выполнена при финансовой поддержке РФФИ (грант № 11-08-96001) и Программы ОЭММПУ РАН 12-Т-1-1004.
