Теоретическое обоснование кинематических параметров вибрационного смесителя сыпучих кормов

Автор: Сабиев У.К., Яцунов А.Н.
Журнал: Вестник Омского государственного аграрного университета @vestnik-omgau
Рубрика: Процессы и машины агроинженерных систем
Статья в выпуске: 3 (51), 2023 года.
Бесплатный доступ
При выращивании сельскохозяйственных животных и птицы рекомендуется скармливать им высокооднородные кормовые смеси в виде комбикормов и комбикормов-концентратов, сбалансированных по составу. Важная роль в технологии приготовления комбикормов отводится машинам и устройствам для смешивания - кормосмесителям. Известно, что в этой области хорошо зарекомендовали себя вибрационные технологии, дающие значительное улучшение качественных показателей. Особенность воздействия вибрации на обрабатываемые сыпучие компоненты заключается в способности интенсифицировать процесс смешивания или вызывает специфические эффекты, которые способствуют перемешиванию. В то же время качественная организация процесса смешивания возможна лишь при целенаправленном воздействии вибрации. В качестве объекта научных изысканий в данной работе принят процесс перемешивания сыпучих кормовых компонентов в вибросмесителе непрерывного действия, который оснащен сменными рабочими органами с коническими поверхностями. Цель исследований - теоретическое обоснование кинематических параметров вибросмесителя. Для теоретического описания процесса смешивания выбрана модель движения материальной частицы. Составлена расчетная схема лабораторно-экспериментального кормосмесителя вибрационного действия, имеющего конические рабочие поверхности. Дифференциальные уравнения, которые будут являться математической моделью, описывающей процесс перемещения частиц по конической поверхности, получены путем применения параметрического уравнения поверхности и системы уравнений Лагранжа. Правильность составления математической модели подтверждается согласно решению Клеро. Составлена программа для ЭВМ, при помощи которой построены расчетные траектории перемещения частиц. Путем анализа графических зависимостей выполнено теоретическое обоснование кинематических параметров - амплитуды и частоты колебаний виброжелоба. Выполнено теоретическое обоснование геометрических параметров конических рабочих поверхностей виброконтакта. По результатам теоретических исследований выявлены некоторые закономерности движения частиц.
Смешивание, вибрация, траектории движения частиц, амплитуда и частота колебаний, кинематический режим, коническая поверхность
Короткий адрес: https://sciup.org/142238364
IDR: 142238364 | УДК: 631.363.7
Theoretical substantiation of kinematic parameters of a vibrating mixer of bulk feed
When growing farm animals and poultry, it is recommended to feed them highly homogeneous feed mixtures in the form of compound feeds and compound feed concentrates, balanced in composition. An important role in the technology of preparation of compound feeds is assigned to machines and devices for mixing - feed mixers. It is known that vibration technologies have proven themselves well in this area, giving a significant improvement in quality indicators. The peculiarity of the impact of vibration on the processed bulk components is the ability to intensify the mixing process or cause specific effects that contribute to mixing. At the same time, the qualitative organization of the mixing process is possible only with the purposeful impact of vibration. As an object of scientific research in this work, the process of mixing bulk feed components in a vibrating mixer equipped with conical working surfaces is adopted. The purpose of the research is the theoretical substantiation of the kinematic parameters of the vibrating mixer. For a theoretical description of the mixing process, a model of the motion of a material particle is chosen. A design scheme of a laboratory-experimental vibrating feed mixer with conical working surfaces has been compiled. Differential equations, which will be a mathematical model describing the process of moving particles along a conical surface, are obtained by applying a parametric equation of the surface and a system of Lagrange equations. The correctness of the mathematical model is confirmed according to the decision of Clerault. A computer program has been compiled, with the help of which calculated trajectories of particle movement are constructed. By analyzing the graphical dependencies, the theoretical justification of the kinematic parameters - the amplitude and frequency of vibrations of the vibrating chute - was carried out. The theoretical substantiation of the geometric parameters of the conical working surfaces of the vibration contact is carried out. According to the results of the theoretical studies, some patterns of particle motion have been identified.
Текст научной статьи Теоретическое обоснование кинематических параметров вибрационного смесителя сыпучих кормов
При производстве животноводческой и птицеводческой продукции значительная доля затрат в структуре себестоимости приходится на корма. С точки зрения повышения рентабельности предпочтительнее полнорационные кормосмеси (комбикорма). Они обладают значительным потенциалом питательности, что положительно сказывается на продуктивности сельскохозяйственных животных и птицы.
Основа комбикорма – зерновые компоненты. В условиях сельскохозяйственных организаций фуражный зерновой ворох можно использовать для производства простых кормосмесей. Таким образом можно наладить изготовление комбикормов. Это позволит сократить затраты на приобретение сырья, его доставку, сделает более рациональным использование фуражного зерна и покупных белково-витаминных добавок. Практика эффективных сельскохозяйственных организаций показывает, что производство комбикормов непосредственно в местах их скармливания приносит положительные результаты.
Уровень рентабельности при изготовлении комбинированных кормов определяется рядом факторов, в том числе правильностью составления технологической линии, ее комплектованием рабочим оборудованием, согласованностью работы составляющих машин и агрегатов [1]. Для приготовления кормосмесей различного типа широкое распространение получили передвижные кормоцехи, но при их применении характерны существенные технологические и санитарно-гигиенические недостатки [2].
Из вышеизложенного следует, что необходимы новые, неординарные решения по внедрению технологий и процессов приготовления кормов. Немаловажная роль в современных технологических линиях отводится вибрационным машинам.
Материалы и методы
Вибрационные машины очень распространены, так как в большинстве случаев их применение позволяет интенсифицировать различные технологические процессы. В агропромышленном комплексе, в таких процессах, как транспортирование, сепарация, дозирование, смешивание и др., за счет вибрации достигается значительное повышение качественных показателей. Схожие с вибрацией процессы являются основополагающими при разделении зернового вороха на решетных станах [3], вибрация применяется для смешивания продуктов переработки зерна [4]. Одним из способов, позволяю-
Vestnik of Omsk SAU, 2023, no. 3(51) PROCESSES AND MACHINES OF AGROENGINEERING SYSTEMS щих интенсифицировать процессы при производстве комбикормов, также является применение машин, имеющих в своей основе рабочие органы вибрационного типа [5].
Под действием вибрации сыпучие материалы подвергаются эффекту «псевдоожижения», в результате чего существенно уменьшается сцепление частиц между собой, улучшается сыпучесть материала, повышается качество кормосмеси и значительно снижается энергоемкость процесса. Стоит отметить, что в ряде случаев вибрация способна оказывать только интенсифицирующее воздействие на процесс, а иногда может вызывать особые эффекты, положительно влияющие на процесс смешивания. Кроме того, происходит «обнажение» дополнительных поверхностей, разрушение конгламе-ратов и увеличение диспергирования твердых тел, т.е., активизация состояния сыпучей смеси [6].
Если начать целенаправленное вибрационное воздействие определенной интенсивности на сыпучую среду, процесс перемешивания начинается активно, так как вибрация создает произвольные столкновения сыпучих частиц между собой. Качественного перемешивания можно добиться только в кормосмесителях, обеспечивающих целенаправленное вибрационное воздействие, хотя смешивание происходит в любом процессе при наложении на него вибрации. Выявлено, что интенсивность перемешивания в значительной степени зависит от кинематических параметров этих специальных устройств.
Основными кинематическими параметрами являются частота и амплитуда колебаний рабочих органов вибросмесителя. Для теоретического описания процесса смешивания и теоретического определения рациональных значений основных параметров возможно применение двух моделей – модели движения материальной частицы и модели движения единого слоя сыпучего материала.
Если движение смешиваемого материала в рабочей камере смесителя осуществляется сравнительно тонким слоем при вибрации невысокой интенсивности, то можно принимать движение всего слоя как движение материальной частицы [7]. Аналогичный подход применяется в некоторых научных работах, в том числе характеризующих технологические устройства с рабочим органом в виде спирального винта [8]. Как правило, материальная частица условно принимается сферической, а сыпучая среда представляется как псевдожидкость [9].
Исходя из вышесказанного, характер взаимного воздействия сыпучего материала и рабочих поверхностей кормосмесителя может быть описан моделью движения материальной частицы. Этот подход может использоваться, так как дает возможность охарактеризовать перемещения частицы на всех этапах, следовательно, более точно. В то же время нужно иметь в виду, что применение данной модели хотя и дает возможность получить общее представление о движении всего слоя сыпучего материала, но не учитывает особенности взаимодействия частиц друг с другом.
Результаты исследований
Для теоретического обоснования кинематических параметров разработана расчетная схема лабораторно-экспериментального вибросмесителя сыпучих кормов [7]. В качестве перемешивающих элементов могут быть применены сменные рабочие органы, имеющие либо рельефные поверхности виброконтакта, либо треугольные отверстия. С точки зрения интенсификации процесса смешивания предпочтение следует отдавать перемешивающим элементам первого типа, так как в этом случае частицы сыпучего материала имеют сложные траектории движения.
Vestnik of Omsk SAU, 2023, no. 3(51)
PROCESSES AND MACHINES OF AGROENGINEERING SYSTEMS
В данной работе теоретическое обоснование кинематических параметров (амплитуды А и частоты ω колебаний желоба) вибрационного смесителя сыпучих кормов выполнено на примере рабочих органов конической формы (рис. 1).
Рис. 1. Перемешивающий элемент с коническими поверхностями
«Для описания процесса движения частицы по конической поверхности использованы обобщенные криволинейные Гауссовы координаты – долгота u , широта v , параметрическое уравнение поверхности и система уравнений Лагранжа. В результате получены дифференциальные уравнения (1), которые являются математической моделью движения частиц по конической поверхности виброконтакта» [7]:
2v2U Arn2 sinu sin rot cos a gf cos2 eU u =------, - v v VV2 + v2U2 cos2 в
« V = ( vU 2 + A ro 2 ( cos u cos a - sin a tg P ) sin ro t + gtg P ) cos2 в - ,
-
- gfV
-
V 2 + v 2 Ui 2 cos2 в
где f – коэффициент трения частицы о рабочую поверхность конуса;
m – масса частицы;
α – угол наклона виброжелоба к горизонтали;
β – угол наклона образующей конуса к его основанию.
Правильность составления математической модели подтверждается следующим образом. Необходимо исключить вибрационное воздействие и действие силы трения, то есть необходимо принять А = 0 и f = 0 . После этого следует проинтегрировать дифференциальные уравнения и выполнить проверку зависимости v ( u ) на развернутой поверхности конуса. В случае если будет получена прямая линия, что соответствует движению точки по геодезической (основано на известном решении Клеро), то подтверждается правильность составления уравнений.
Разработанная расчетная схема перемещения материальных частиц по поверхности перемешивающего элемента использована для составления программы для ЭВМ. Программа позволила выполнить обоснование амплитуды и частоты колебаний вибросмесителя за счет анализа расчетных траекторий перемещения частиц по рабочей поверхности конического элемента. Данный метод может быть применен, так как закономерности движения отдельно взятых частиц дают представления об интенсификации всего процесса смешивания.
Для выполнения расчетных действий необходимо предварительно определить основные параметры рабочей виброповерхности конуса (высоту Н конуса и радиус R его основания). За определяющий критерий принимается толщина сыпучего слоя, которая не должна превышать высоту конусов. В данном исследовании принимается, что
Vestnik of Omsk SAU, 2023, no. 3(51)
PROCESSES AND MACHINES OF AGROENGINEERING SYSTEMS
Н = 30 мм, а толщина слоя h = 28–30 мм. Исходя из рационального планирования количества конических поверхностей в одном ряду, радиус основания R принимается равным 24 мм [7].
При построении теоретических траекторий перемещения частиц «передняя по ходу движения часть конуса разделяется на секторы с диапазоном 10°. Условно принято, что с правой и левой сторон от оси симметрии конуса (параллельной продольной оси симметрии смесителя) частицы имеют примерно одинаковые траектории движения, поэтому для анализа была выбрана правая передняя четверть конуса. Как было указано ранее, в качестве координатных осей выбраны долгота u и широта v . За нулевые координаты частиц принимаются точки, находящиеся у основания конуса от 0 до 90° с диапазоном 10°. Для удобства построения траекторий движения частиц нулевая отметка координаты v перенесена к основанию конуса» [7].
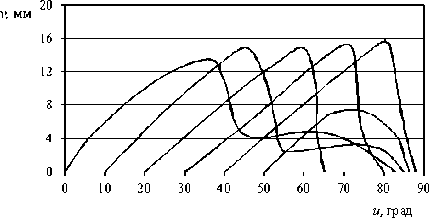
Для определения характера и степени влияния амплитуды колебаний на интенсификацию процесса перемешивания выполнен анализ теоретических траекторий перемещения шести частиц при определенных условиях: Н = 30 мм; R = 24 мм; α = 10°; ω = 3 Гц; f = 0,35. При этом амплитуду колебаний изменяли в диапазоне 8–14 мм с интервалом 2 мм.
По изображенным на рис. 2, а зависимостям v ( u ) при амплитуде ( А ), равной 8 мм, можно сделать заключение о том, что материальные частицы сначала совершают подъем на поверхность конуса, после сразу скатываются вниз. Отмечается, что их смещение по оси u незначительно (примерно 10–20°). Этот факт негативно влияет на производительность вибросмесителя. Высоту подъема частиц на поверхность конуса также можно оценить как незначительную – только одна частица преодолевает отметку 6 мм. Траектории перемещения частиц пересекаются всего 1–2 раза, что не позволяет ожидать значительной интенсификации процесса смешивания.
Если придать амплитуде ( А ) значение, равное 10 мм (рис. 2, б ), то по сравнению с первым случаем на теоретических траекториях будет наблюдаться повторный перегиб. Это позволяет предположить, что некоторые частицы получают новый виброимпульс. Такое совместное сочетание всех параметров обеспечивает достижение высоты в 6 мм сразу трем частицам. Определяющим фактором является время, так как оно достаточно для равномерного подъема частиц. Все это говорит о повышении эффективности использования рабочей поверхности конуса. Продвижение частиц вдоль оси u составляет примерно 15–20°.
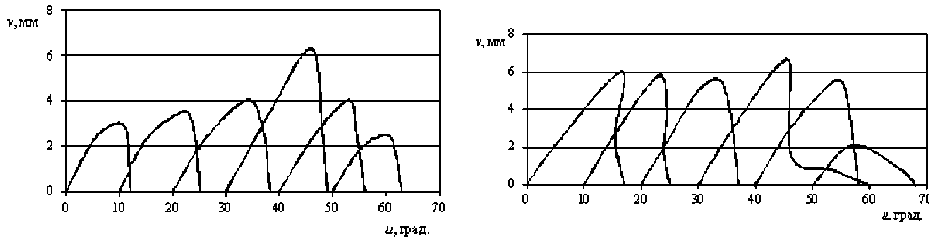
а б
Рис. 2. Теоретические траектории перемещения частиц: а – при А = 8 мм; б – при А = 10 мм
При увеличении амплитуды колебаний до 12 мм (рис. 3) подъем частиц составляет более 7,5 мм. Высота подъема одной частицы составляет даже более 8 мм. Траекто-
Vestnik of Omsk SAU, 2023, no. 3(51)
PROCESSES AND MACHINES OF AGROENGINEERING SYSTEMS рии движения имеют четко выраженный сложный характер и взаимодействуют друг с другом минимум три раза, что благоприятно сказывается на интенсификации перемешивания. Перемещение всех частиц по оси u составляет более 30°, за счет этого увеличивается производительность вибросмесителя.
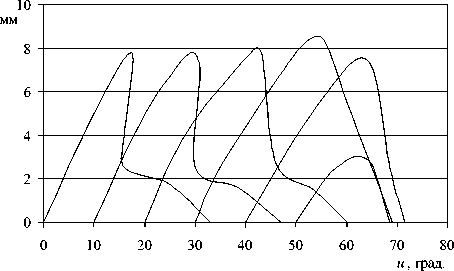
Рис. 3. Теоретические траектории перемещения частиц при А = 12 мм
Если амплитуде придать значение, равное 14 мм (на рисунке не представлено), то отмечается, что некоторые частицы, имеющие начальные координаты u о = 30° и более, характеризуются нечетко выраженными теоретическими траекториями перемещения. Имеют место случаи пунктирной, то есть прерывистой, расчетной траектории. Можно предположить, что при таком сочетании амплитуды и частоты колебаний частицы только соприкасаются с конической поверхностью, а не скатываются с нее. Наблюдается снижение интенсификации смешивания.
Анализ графических зависимостей, изображенных на рис. 2–3, и вышеприведенных фактов и предположений показывает, что рациональным является сочетание прочих параметров с амплитудой колебаний, равной 12 мм (исследованный диапазон составляет 4 мм). При движении в нем от меньшего значения к большему отмечается:
-
1) перемещение частиц вдоль оси u становится больше, что благоприятно сказывается на производительности кормосмесителя;
-
2) увеличивается число частиц с пересекающимися расчетными траекториями;
-
3) увеличивается высота подъема частиц на конус.
Таким образом, ожидается повышение качества смеси за счет интенсификации перемещений частиц по рабочим поверхностям конусов.
Последующие теоретические изыскания направлены на определение степени воздействия частоты колебаний виброжелоба на качество перемешивания. Исходные установочные параметры приняты на прежнем уровне. По результатам проведенных исследований амплитуда колебаний принята равной 12 мм. Частота колебаний изменялась в пределах от 4 до 8 Гц с интервалом 2 Гц.
Методика определения степени влияния частоты колебаний виброжелоба лабораторно-экспериментального смесителя на критерий оптимизации основана на выполнении анализа расчетно-теоретических линий передвижения отдельных частиц и их взаимодействия между собой. Графическая зависимость v ( u ) получена при помощи математической модели (1).
На рис. 4а ( ω = 4 Гц) видны повторные перегибы на всех траекториях. Можно предположить, что частицы успевают получить повторный виброимпульс в то время, пока они еще не скатились с рабочей поверхности конуса. Четыре из шести анализируемых частиц достаточно активны: их траектории неоднократно пересекаются; высота
Vestnik of Omsk SAU, 2023, no. 3(51)
PROCESSES AND MACHINES OF AGROENGINEERING SYSTEMS подъема по оси v колеблется от 8,5 до 10,2 мм; смещение вдоль оси u достигает 40°. Имеет место единичный случай резкого изменения направления движения частицы, что подтверждается наличием излома в экстремуме.
При переходе к следующему кинематическому режиму частота колебаний устанавливается равной 6 Гц. Это вносит значительные изменения в зависимость v ( u ) (рис. 4, б ). По сравнению с предыдущим кинематическим режимом наблюдаются плавные переходы в областях верхнего и нижнего экстремума. Рабочая коническая поверхность используется более эффективно, так как практически все частицы при подъеме пересекают отметку в 13,5 мм, некоторые достигают высоты 15,5 мм; движение равномерное. Продвижение по оси u превышает 40°, что дает предпосылки для роста скорости частиц, и, следовательно, производительности смесителя.
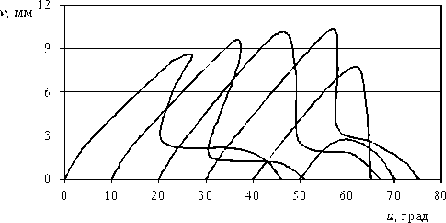
а б
Рис. 4. Теоретические траектории перемещения частиц: а – при ω = 4 Гц; б – при ω = 6 Гц
На рис. 5 изображены графические зависимости при ω = 8 Гц. Анализ кривых показывает, что движение частиц происходит скорее хаотично, так как их траектории существенно отличаются друг от друга. Каждая последующая частица более «виброак-тивна» по сравнению с предыдущей. Так, например, у частицы, начинающей подъем на конус в отметке 30° по оси u наблюдается четыре экстремума. Высота ее подъема превышает 16 мм. Частица, «стартующая» из нулевой отметки, имеет лишь один перегиб и не поднимается при этом более 8 мм. В отдельных случаях наблюдаются резкие пики в области экстремума. Скорее всего, такой режим будет характеризоваться как неустойчивый, и будет способствовать значительному увеличению динамических нагрузок на установку. Можно сделать предположение, что дальнейшее увеличение частоты колебаний становится нецелесообразным, так как при 8 Гц уже наблюдается некая нестабильность процесса.
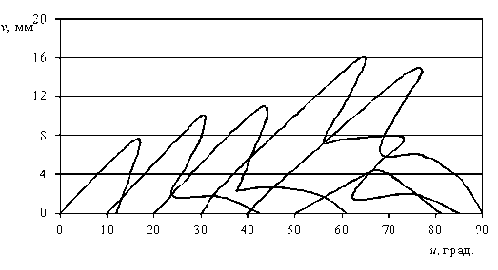
Рис. 5. Теоретические траектории перемещения частиц при ω = 8 Гц
Vestnik of Omsk SAU, 2023, no. 3(51) PROCESSES AND MACHINES OF AGROENGINEERING SYSTEMS
Исходя из вышеизложенного следует, что если частоту колебаний виброжелоба установить на уровне 6 Гц, то такой режим работы можно считать наиболее рациональным, так как наблюдается интенсификация процесса смешивания и можно ожидать увеличения производительности вибросмесителя.
Анализ построенных по математической модели расчетных траекторий позволяет выявить определенные закономерности, которые в дальнейшем могут быть использованы для усовершенствования рабочих поверхностей перемешивающих элементов и определения рациональных режимов работы:
-
1) Частицы, имеющие исходные координаты по оси u 0–30°, получают существенное сопротивление при подъеме на конус за счет «лобового» столкновения с ним. Как следствие – медленное продвижение по виброжелобу и ожидаемое сгруживание частиц. В то же время это может положительно сказаться на относительном смещении слоев сыпучего материала за счет разности скоростей, что способствует перемешиванию.
-
2) Наибольшей «виброактивностью» характеризуются частицы, которые начинают подъем на конус в области 30–40°. Благодаря своему первоначальному расположению они способны максимально подниматься на поверхность конуса и имеют самую длинную траекторию. Именно в этой области, независимо от режима работы вибросмесителя, формируются оптимальные условия для подъема частицы.
-
3) Те частицы кормового материала, у которых исходные координаты составляют от 40 до 50°, движутся вверх по конической поверхности на небольшое расстояние, после сразу скользят вниз. С теоретической точки зрения это объясняется нехваткой времени нахождения частицы на поверхности конуса для получения ею повторного виброимпульса. Даже изменение рабочего режима кормосмесителя не способно повлиять на «виброактивность» частиц.
-
4) В тех случаях, когда исходная координата частицы превышает 50°, ее движение происходит по плоской поверхности рабочего органа без подъема на конус, лишь огибая его у основания.
Изложенные выкладки можно учесть при дальнейших теоретических исследованиях, чтобы повысить эффективность использования рабочей конической поверхности. Возможно составление математической модели и построение расчетных траекторий движения частиц по конусу, наклоненному по ходу движения частиц, или поиск других геометрических поверхностей.
При проектировании конструкции лабораторно-экспериментального образца вибрационного смесителя кормов важно предусмотреть возможность его наладки на рекомендуемый кинематический режим. Для этого должна быть обеспечена возможность регулировки амплитуды и частоты колебаний виброжелоба. Так, например, частоту колебаний возможно изменять за счет настройки частоты вращения вала при помощи частотного преобразователя [10].
Заключение
На основании математической модели построены расчетные траектории движения частиц по рабочей виброповерхности конуса. Геометрические параметры – диаметр основания и высота конусов обоснованы теоретически с точки зрения рациональной организации процесса смешивания. Путем анализа графических зависимостей выполнено теоретическое обоснование амплитуды (12 мм) и частоты колебаний (6 Гц) лабораторно-экспериментального вибрационного смесителя сыпучих кормов.
Vestnik of Omsk SAU, 2023, no. 3(51)
PROCESSES AND MACHINES OF AGROENGINEERING SYSTEMS
Список литературы Теоретическое обоснование кинематических параметров вибрационного смесителя сыпучих кормов
- Федоренко И.Я., Садов В.В. Технологическая оптимизация хозяйственных комбикормовых предприятий: монография. Барнаул: РИО Алтайского ГАУ, 2017. 249 с. EDN: YVMUDR
- Купреенко А.И., Исаев Х.М., Михайличенко С.М. Технологическая линия приготовления и раздачи кормосмесей на базе автоматического кормового вагона // Сельский механизатор. 2020. № 1. С. 14-15. EDN: MSFUHN
- Сабиев У.К., Яцунов А.Н., Скусанов И.В. Сепарирование зерна, движущегося по плоскому решету, совершающему поперечные колебания // Вестник Омского ГАУ. 2022. № 3(47). С. 97-101. EDN: KBOGCH
- Мальцев А.А., Олейников Н.В. Совершенствование технологии и оборудования для смешивания продуктов переработки зерна: сборник статей // Инновационные тенденции развития российской науки: материалы XV Междунар. науч.-практ. конф. молодых ученых. Красноярск, 2022. С. 435-438. EDN: VYKXBJ
- Федоров О.С., Широбоков В.И. Исследование эффективности работы виброустановки для сыпучих материалов // Сельский механизатор. 2022. № 10. С. 16-17. EDN: KKGSXF
- Sabiev U.K., Demchuk E.V., Myalo V.V., Soyunov A.S. Innovative Equipment and Production Method for Mixed Fodder in the Conditions of Agricultural Enterprises. IOP Conference Series: materials Science and Engineering VIII International Scientific Practical Conference "Innovative Technologies in Engineering" 18-20 May 2017, Yurga, Russian Federation. 2017. Volume 221. EDN: XPILID
- Яцунов А.Н., Сабиев У.К. Повышение качества сыпучих кормосмесей путем оптимизации основных параметров вибрационного смесителя: монография. Омск: Изд-во ФГБОУ ВО Омский ГАУ, 2017. 146 с. EDN: YVAVOX
- Исаев Ю.М., Семашкин Н.М., Джабраилов Т.А., Кошкина А.О., Хабарова В.В. Результаты решения уравнений движения частицы сыпучего материала // Сельский механизатор. 2019. № 5. С. 20-21. EDN: HKCGBI
- Гучева Н.В., Игнатенко И.В. Моделирование движения частицы в вибрирующей сыпучей среде: сборник статей // Инновационные технологии в науке и образовании (ИТНО-2017). Материалы V Международной научно-практической конференции. 2017. С. 77-80.
- Лебедев Л.Я., Иванов А.Г., Охотникова И.А., Горшков З.В. Смеситель для приготовления биологических активных добавок при кормлении животных // Сельский механизатор. 2020. № 10. С. 32-33. EDN: JNIVDO
