Теория непараметрических систем. Общий подход

Автор: Медведев А.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 3 (20), 2008 года.
Бесплатный доступ
С настоящей работы начинается цикл публикации, посвященный новому разделу теории управления. 1еория непараметрических систем управления ориентирована на меньший объем априорной информации, что и отличает ее от общепринятой теории управления, которая относится к классу параметрической. Принципиальное отличие состоит в том, что параметрическая теория предполагает этап выбора модели исследуемого процес-са с точностью до вектора параметров, а непараметрическая - сведения о качественных свойствах характери-стики пиоиесса.
Короткий адрес: https://sciup.org/148175711
IDR: 148175711 | УДК: 62.501
Nonparametric systems theory. General approach
This article publications cycle devotes to a new part of control theory. Nonparametric control systems theory is focused on the lower size of a priori information that differs it from the standard parametric control theory. The parametric theory assumes the stage of investigation process model to within to the vector of parameters choosing, but nonparametric one requires data of process characteristics quality properties. It is principally different.
Текст научной статьи Теория непараметрических систем. Общий подход
Теория - в виду практики.
Девиз конгрессов IFAC
Теория автоматического управления предполагает выбор (определение) уравнения объекта с точностью до набора параметров. При этом существенное значение имеет априорная информация об исследуемом процессе. В фундаментальных монографиях А. А. Фельдбаума [1] и Я.З. Цыпкина [2] рассматриваются различные уровни априорной информации об исследуемом процессе при решении задач идентификации и управления. Методы классической и современной теории автоматического управления подробно рассмотрены в [3-7]. Основы применения теории случайных функций к задачам автоматического управления заложены в [8].
Уровни априорной информации. Под математической моделью объекта (процесса) обычно понимают его количественную формализацию. Математическая модель -это формальное описание процесса с помощью математических средств: дифференциальных, интегральных, интегро-дифференциальных, разностных, алгебраических уравнений, а также неравенств, множеств и т. д. [3]. Крайне важным является ответ на вопрос: как выбрать оператор объекта, превращающий входные переменные, дей-
Опыт - единственный источник истины.
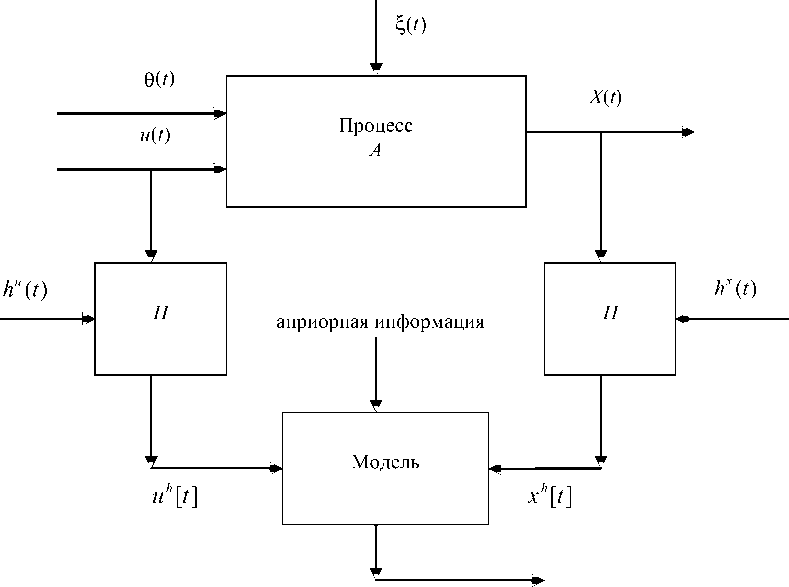
А. Пуанкаре ствующие на него, в выходные. В некоторых случаях возможно использование фундаментальных законов, лежащих в основе функционирования физических, химических, биологических и других процессов, т. е. имеющих место для механических, электрических, электромагнитных, термодинамических, гидравлических, электрохимических, биофизических и других процессов. К сожалению, мы часто сталкиваемся с серьезными трудностями на этом пути, особенно при изучении технологических, социальных, экономических и многих других процессов, т. е. сталкиваемся с неполнотой информации об интересующем нас процессе. И степень нашего незнания может быть существенно различной. В этой связи Л. Бриллюэном было отмечено, что «всякая плодотворная гипотеза кладет начало удивительному извержению потока непредвиденных открытий», но с другой стороны «физические модели отличаются от мира так же, как географическая карта от поверхности Земли». Имеющийся опыт теории и практики решения задач идентификации убеждает, что априорная информация и ее использование при моделировании исследуемого процесса может оказать- ся определяющей. Достаточно в общем виде это может быть представлено схемой (см. рисунок)
В блоке «Модель» определен принятый класс моделей на основании априорной информации об исследуемом процессе и анализе текущей информации {uh [t], xh [t], t = 1,5}, здесь же осуществляется настройка (обучение) модели принятого класса. В дальнейшем обучающую выборку {uh[t],xh[t],t = 1,5} ,из соображений простоты записи, будем обозначать {u[t], x[t], t = 1,5}.
Итак, математическое представление исследуемого процесса может быть представлено в виде: x (t) = A(u (t), 6( t), £( t), t), а его модель в форме:
x [ t + 1] = A (и [ t + 1],[ t ]),
где A - оператор модели, кроме того, все случайные факторы, действующие в каналах измерения и на процесс, имеют нулевые математические ожидания и ограниченные дисперсии.
Системы с полной информацией. В этом случае оператор процесса Ав(1) известен точно, а случайные помехи, действующие на объект и каналах связи отсутствуют, кроме того
u ( t ) е Q ( u ( t )) , (3)
где Q(u (t)) - некоторая известная область допустимых значений u (t). При решении задач идентификации и управления могут быть использованы методы математической теории оптимальных процессов [9; 10], а также другие методы.
Системы с максимальной, но неполной информацией. Здесь предполагается, что помехи h ( t ) на рисунке отсутствуют, но помеха £ ( t ) может быть точно измерена, отсутствует также входная переменная 6 ( t ) , а операторА известен точно. Подробно этот случай исследовался в [1] для непрерывных, дискретно-непрерывных и чисто дискретных систем.
Системы с неполной информацией. Это системы с независимым (пассивным) накоплением информации [1]. В этом случае влияние входного воздействия 6 ( t ) воспринимается как просто случайное воздействие, аналогичное £ ( t ) , тогда мы имеем дело с объединенным входным случайным воздействием ( 6 ( t ), £ ( t )). Тем не менее, природа этих случайных воздействий на процесс существенно различна. Помехи £ ( t ) - это обычно предполагаемое в теории стохастических систем случайное воздействие на объект, 6 ( t ) - переменные, «имена» которых известны исследователю, но не подающиеся контролю, либо их контроль возможен частично через значительно (в десятки и сотни раз) превышающий A t . Кроме того, класс операторовА не известен точно, но необходимы предположения о плотности распределения всех слу-
x [ t ]
Схема использования априорной информации об исследуемом процессе: А - оператор процесса; Н- каналы измерения соответствующих переменных процесса; u(t) - Х-мерный вектор контролируемых входных переменных;
6 ( t ) - вектор входных переменных не поддающихся контролю; x(t) - «-мерный вектор выходных переменных; hu ( t ), hx ( t ) - случайные помехи при измерении соответствующих переменных; uh [ t ], x h [ t ] - наблюдения переменных в дискретные моменты времени t через соответствующие интервалы времени A t ; ^ ( t ) -случайные помехи, действующие на процесс; x ( t ) -выход модели
чайных факторов (см. рисунок), уравнения каналов связи Л, и о классе оператора A с точностью до вектора параметров. Обычно плотности вероятности случайных факторов, действующих на объект и в каналах измерения переменных, предполагаются нормальными и аддитивными. Ясно, что в этом случае необходимо наличие выборки { и [ t ], x [ t ], t = 1, 5 } , а сами наблюдения предполагаются статистически независимыми [1], т. е. наблюдения, например и [1], и [2],... - независимы. Такие системы относят к классу разомкнутых или нейтральных.
Системы с активным накоплением информации. Особенность этого уровня априорной информации состоит в том, что задачи идентификации и задачи управления здесь могут быть объединены. Элементы выборки измерений поступают последовательно в обучающую модель и систему управления, т. е. ( и [1] x [1]),( и [2] x [2]),( и [3] x [3]),... . Таким образом, в случае объединения этих задач выработка входных воздействий носит двойственный характер -они должны быть одновременно и изучающими, и управляющими, т. е. носить дуальный характер. Теория дуального управления была создана А. А. Фельдбаумом и существенно развита в [1]. Однако, если помехи, действующие на процесс, аддитивны и в каналах измерения, то в целом система дуального управления может быть приведена к разомкнутой, т. е. темп накопления информации оказывается независимым от значений входных переменных. Такие системы называют приводимыми к разомкнутым или нейтральными [1]. Но существует класс не нейтральных систем, т. е. класс неприводимых. Например, если £ ( t ) мультипликативна по отношению к и ( t ) . Такой случай также исследован в [1].
Системы с параметрической неопределенностью. Параметрический уровень априорной информации предполагает наличие параметрической структуры модели и некоторых характеристик случайных помех, обычными из них являются нулевое математическое ожидание и ограниченная дисперсия. Для оценивания параметров используются чаще всего разнообразные итеративные вероятностные процедуры. При этих условиях также решается задача идентификации в узком смысле [3], как и во всех предыдущих случаях.
Системы с непараметрической неопределенностью. Непараметрический уровень априорной информации не предполагает наличие модели, но требует наличие некоторых сведений качественного характера о процессе, например, однозначность, либо неоднозначность его характеристик, линейность для динамических процессов либо характер его нелинейности. Для решения задач идентификации на этом уровне априорной информации (идентификация в широком смысле) применяются методы непараметрической статистики.
Системы с параметрической и непараметрической неопределенностью. Важными с точки зрения практики являются задачи идентификации многосвязных систем в условиях, когда объем исходной информации не соответствует ни одному из вышеописанных типов. Например, для отдельных характеристик многосвязного процесса на основании физико-химических закономерностей, энергетических, закона сохранения массы, балансовых соотношений могут быть выведены параметрические зако номерности, а для других нет. Таким образом, мы находимся в ситуации, когда задача идентификации формулируется в условиях и параметрической, и непараметрической априорной информации. Тогда и модели представляют собой взаимосвязанную систему параметрических и непараметрических соотношений.
Синтез непараметрических алгоритмов. Приведем фрагмент синтеза непараметрической модели. Сформируем критерий оптимальности:
R ( x ) = М и { M x { Q ( x , x )/ и } } , (4)
где Q ( • ) некоторая выпуклая функция.
Задача отыскания наилучшего x сводится к минимизации R(x) по , т. е. к поиску такого xопт, что R(x °пт) = minx R(x). Ясно, что вид x будет определяться видом функции Q (x, x). Так, если Q (x, x) = (x - x )2, то xопт = x(u) = M {x/и} . (5)
Непараметрическая оценка х(м) будет xSj(. и ) = sksk
Z x j п ф ( С ;1 ( и v - и v [ t ])) хп ф ( С ;1 ( и v - и v [ t ])), (6) j =1 v=1 / j = 1 v=1
j = 1 n , где колоколообразные функции Ф ( ) , параметр размытости С5 удовлетворяет условиям сходимости [11].
В случае идентификации линейных динамических процессов может быть использован иной путь, известный из теории линейных операторов [12; 13]. Остановимся только на общих чертах этого пути.
Пусть оператор исследуемого процесса (влияние переменных 0 ( t ) и £ ( t ) опустим)
x ( t ) = Au ( t )} (7)
линеен, тогда он может быть представлен в достаточно общем виде при ненулевых начальных условиях (из соображений простоты рассмотрим случай скалярных u(t) и x(t))
x ( t ) = и ( t ) G (0) + j q ( t - т ) и ( т ) d т (8)
где G(t) и q(t) - соответственно переходная и весовая функции системы в направлении «вход-выход». При нулевых начальных условиях (8) будет x (t) = jq (t -т) и (т) d т. (9)
Как известно, оператор обратный оператору (8) будет иметь вид и ( t ) = A -1 x ( t ) и далее (при нулевых начальных условиях)
и ( t ) = x ( t ) Л (0) + j Х ( t - т ) x ( т ) d т . (10)
Заметим, что оператор, обратный (8), также является линейным и ограниченным, а оператор, обратный (9), является линейным, но неограниченным.
Центральная идея непараметрического моделирования и управления линейными динамическими системами состоит в следующем. Сначала снимают на реальном объекте переходные характеристики, подавая на вход объекта единичный сигнал и ( t ) = 1( t ) , т. е. получают выборку x [ t ] через интервал времени A t , t = 1, 5 , затем строят непараметрическую оценку G5 ( t ) и оценку q5 ( t ) , исходя из того, что q ( t ) = dG ( t )/ dt . В результате непараметрическая модель примет вид:
xs ( t ) = u ( t ) Gs (0) + j qs ( t — t) u (t) d т . (11) 0
Следующий принципиально новый этап предложен в такой последовательности. Поскольку на реальном объекте нельзя снимать переходную характеристику в направлении «выход-вход», то переходная характеристика в этом направлении снимается на модели (11), т.е. u ( t ) = 1( t ) через интервал времени A t , таким образом, получается реализация x [ t ], t = 1, s . Далее аналогичным образом строятся непараметрические оценки Л s ( t ) и Xs ( t ) , и далее строится оценка (10)
u s ( t ) = x ( t ) Л s (0) + j X ( t - t) x (t) d т . (12) 0
Таким образом, (12) является непараметрическим регулятором линейной динамической системы, для этого достаточно положить x ( t ) = x * ( t ) , x * ( t ) - заданное значение выхода системы.
Существенным в вышеизложенном является то, что получен регулятор в условиях, когда вид уравнения с точностью до параметров, описывающих его процесс, не известен, как это делается в классической теории управления. Достаточно сказать, что в фундаментальной монографии [13], посвященной теории линейных систем на основе линейных операторов, не приведено ни моделей, ни регуляторов, которые можно было бы использовать на практике. В последующих статьях, посвященных теории непараметрических систем, будут детально изложены модели, решающие правила, алгоритмы управления, оптимизации, принятие решений, способы их настройки и различные тактики накопления информации в условиях непараметрической неопределенности, а также результаты моделирования для различных задач обучения и адаптации. Основное назначение настоящей работы состоит в том, чтобы показать место непараметрической теории при решении разнообразных задач адаптации и обучения в условиях малой априорной информации. В дальнейшем будет обращено специальное внимание на организационные системы. И здесь важное место будет уделено некоторым вопросам моделирования как в игровых [14], так и в стохастических процессах [15], кроме того, будут рассматриваться некоторые результаты непараметрического оценивания линейных операторов [16].
Таким образом, приведены различные уровни априорной информации, соответствующие, по существу, различным разделам теории управления. Проведен анализ подходов при построении адаптивных и обучающихся систем различного назначения. Отмечено, что в условиях непараметрической неопределенности неприменимы известные методы построения соответствующих алгоритмов. Показан фрагмент синтеза непараметрических алгоритмов идентификации статических и линейных динамических объектов. При этом специально обращается внимание на способ получения алгоритмов управления на основе теории линейных операторов. Дальнейший цикл статей будет посвящен более детальному рассмотрению теории непараметрических систем.
