The comparison of efficiency of the population for-mation approaches in the dynamic multi-objective optimization problems

Author: Rurich M.A., Vakhnin A.V., Sopov E.A.
Journal: Siberian Aerospace Journal @vestnik-sibsau-en
Section: Informatics, computer technology and management
Article in issue: 2 vol.23, 2022.
Free access
Dynamic multi-objective optimization problems are challenging and currently not-well understood class of optimization problems but this class is of great practical value. In such problems, the objective functions, their parameters and restrictions imposed on the search space can change over time. This fact means that solutions of the problem change too. When changes appear in the problem, an optimization algorithm needs to adapt to the changes in such a way that the convergence rate is sufficiently high. The work is devoted to the comparison of the different approaches to formation of a new population when changes in the dynamic multi-objective optimization problem appear: using solution, which obtained in the previous step; using a random generating of the population; partial using solutions which obtained in the previous step. In the first part of the article the classification of the changes in the problems is provided; the currently existing approaches to solving the problems based on evolutionary algorithms are considered. During the research NSGA-2 and SPEA2 algorithms are used to solving the dynamic optimization problems, the benchmark problems set is used to the comparison of the approaches. Obtained results being processed by Mann–Whitney U-test. It was obtained that changes rate in the problem affect the efficiency of the application of the solutions obtained in the previous step of new population the forming.
Dynamic multi-objective optimization, dynamic optimization, multi-objective optimization, evolutionary algorithms
Short address: https://sciup.org/148329623
IDR: 148329623 | UDC: 519.85 | DOI: 10.31772/2712-8970-2022-23-2-227-240
Text of the scientific article The comparison of efficiency of the population for-mation approaches in the dynamic multi-objective optimization problems
Multicriteria optimization in a non-stationary environment (dynamic multi-objective optimization, DMOO) is a complex and currently insufficiently studied class of optimization problems. In such problems, objective functions, their parameters, and restrictions imposed on the search area can change over time [1]. At the same time, the objective functions in this case are a “black box”, therefore, the form of the objective functions and their properties remain unknown, and there is also no possibility of calculating derivatives, which greatly complicates the choice of an appropriate method for solving this class problems. At the moment, a number of approaches to solving problems have been proposed, however, these approaches can provide a successful solution of a problem only if it has a strictly defined form, so it is necessary to continue researching approaches for solving this type of problems.
Multicriteria non-stationary optimization
The DMOO problem can be represented as a set of two other optimization problems: a multiobjective optimization (MOO) problem and a dynamic optimization (DO) optimization problem in a non-stationary environment.
A feature of the multicriteria optimization problem is the presence of two or more objective functions that must be optimized simultaneously. Thus, when finding a solution to the problem, it is necessary to take into account the values of all objective functions. Formally, the problem of multiobjective optimization can be represented as
{ f 1( x ), f 2( x ),..., fk ( x )} → min , (1)
x where fi is a set of optimizable functions; i ∈ [1, k]; k is a number of objective functions; x is a decision vector from the allowable region S.
As mentioned above, the objective functions in most practical problems conflict with each other, that is there is rarely a solution that would be optimal immediately for all target functions. Often it is necessary to choose a compromise solution, in which the values of the objective functions are acceptable in a certain sense, using a set that is Pareto optimal (Pareto set, PS) [2].
Many applied optimization problems are in conditions that change over time. Such problems are called optimization problems in a non-stationary environment or time-dependent optimization problems. A feature of DO problems is that search space of a problem and landscape of the objective function change over time, and at the same time, the optimal solution to the problem also changes [3].
In many publications considering DO, it is proposed to use evolutionary algorithms (EA) to find a solution to this type of problem. The EA class is a good tool for solving DOs because these algorithms are inspired by natural systems that are constantly under the influence of changing factors. EAs operate with a population of solutions, so in the case when the optimal solution to the problem changes, one of the available solutions can be quite close to the optimal one.
The DO task can be formally defined as follows [3]:
f(x,a(t)) →min , (2) x where f - objective function; x - solution vector from the search space; a(t) - vector of some timevarying objective function parameters; t e [0, T] - time interval in which the problem is considered.
In practical problems, the vector a ( t ) can represent the parameters of the external environment (such as, for example, temperature, available resources, etc.) that affect the objective function. In artificially generated test problems, for example, in problems with moving extremum areas - depressions, this can be a parameter of their depth, width and location. The vector a ( t ) can also include other variable parameters, for example, the number of variables of the objective function [4].
Most of the existing works on DO consider this problem as a sequence of problems on a discrete time interval t e {0,^, T }:
{ f ( x , a (1)) → min, f ( x , a (2)) → m i n,..., f ( x , a ( T )) → m i n} . xx x
The definition of a DMOO problem can be represented as follows [4]:
{ f 1( x , a ( t )), f 2( x , a ( t )),..., fk ( x , a ( t ))} → min . x
The complexity of multicriteria optimization in a non-stationary environment lies in the fact that along with a change in the problem, a change in the Pareto front (PF) occurs.
Publications on DMOO provide different ways of classifying such problems, depending on the type of change [4]:
-
- classification based on the rate of change. With an increase in the rate of change, the allowable time for the algorithm to adapt to emerging changes decreases, which complicates the problem;
-
- classification based on the degree of change. Changes can be major or minor. In case of minor changes, it is possible to use information obtained from the previous state;
-
- classification based on the predictability of changes. Changes can be regular (cyclic) and, as a result, predictable, or random (acyclic);
-
- classification based on the variability of PF and PS. This classification option includes 4 types of problems: the optimal PS changes, the optimal PF does not change; both the optimal PF and the optimal PS change; the optimal PS does not change, the optimal PF does not change; both the optimal PS and the optimal PF do not change. In the latter case, for example, only local extrema can change.
There are two ways taking into account the changes occurring in the task [5]:
-
1. Consider every change as a new optimization problem that needs to be solved from scratch.
-
2. Use information from the previous solution step to speed up the optimization process after the change.
However, the first approach is not always suitable due to time limits. In the second case, the algorithm must be able to adapt to changes, that is there must be sufficient diversity in the solutions used so that the algorithm can respond flexibly to changes.
In the works devoted to DMOO, approaches to solving such problems based on existing EAs are considered:
-
- approaches based on the introduction of mechanisms in EA that contribute to an increase in diversity (diversity based [6,7]);
-
- approaches based on prediction of changes in the problem (prediction based [8; 9]);
-
- approaches based on the use of information about the previous state in the problem when searching for a solution in the current state (memory based [10; 11]);
-
- approaches based on the use of several populations evolving in parallel to each other and exchanging information (multi-population based [12; 13]).
Application of EA for solving DMOO problems is currently insufficiently studied, while the use of EA for solving MO problems is much more developed - for this class of problems there are a number of widely used methods based on EA, such as, for example, NSGA-2 and SPEA2, which allow to approximate PF with high accuracy. Therefore, it makes sense to use already existing methods in the formation of approaches to solving DMOO problems.
Algorithm NSGA-2
(Non-dominated Sorting Genetic Algorithm) is one of the most well-known algorithms for solving the multiobjective optimization problem. Figure 1 schematically shows the principle of operation of two decision sorting mechanisms used in NSGA-2: non-dominated decision sorting and crowding distance sorting [14].
The sorting of non-dominated solutions is as follows. The total population R t consists of the population of parents R t and the population of their descendants Q t , its size is 2N , where N is the size of the population. Further, the solutions in the set R t are sorted as follows: the subset F 1 includes all nondominated solutions (solutions for which there are no dominant solutions in the population) - this is called the first non-dominated front; the subset F 2 includes solutions that are non-dominated within the set { R t / F 1 } (the set R t , excluding the subset F 1 ), this is called the second non-dominated front, etc.
Next, a new population P t +1 is formed: subsets of non-dominated fronts are added in turn, starting from the first, to the population Pt + 1 until the size of the subset of the next non-dominated front does not exceed the available size of P t +1 . In this case, solutions are sorted according to their degree of crowding: for solution i , the distance to neighboring solutions is calculated (Fig. 2). Thus, a variety of solutions enter the population.
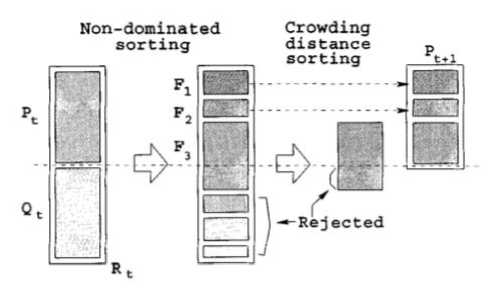
Рис. 1. Механизмы сортировки в NSGA-2 [14]
Fig.1. Procedure of sorting a population in NSGA-2 [14]
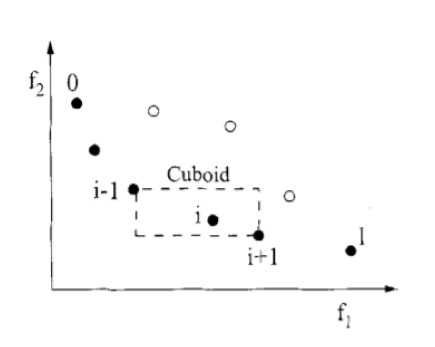
Рис. 2. Сортировка по степени скученности в NSGA-2 [14]
Fig. 2. Crowding distance sorting in NSGA-2 [14]
После чего к новой популяции P t+1 применяются операторы селекции, рекомбинации и мутации. After that, selection, recombination and mutation operators are applied to the new population P t+1 .
Algorithm SPEA2
The SPEA2 algorithm (Strength Pareto Evolutionary Algorithm) is also one of the most popular multiobjective optimization algorithms. One of its features is that, along with a population of solutions, the algorithm uses an archive of non-dominated solutions (external set) [15]. To maintain a given number of individuals stored in the archive, they are clustered according to the degree of remoteness from each other, as a result of which only a representative of the cluster remains in the archive. The use of an archive of solutions allows the algorithm to better approximate the Pareto front in comparison with other algorithms.
Another feature of the algorithm is the calculation of the suitability of individuals. To begin with, each individual i in the population P t and in the external set P t* is assigned the value of "force" S , which is the number of individuals who dominate the considered individual [15]:
S ( j ) = { j | J e P t + P t * л i^j }|
where means Pareto dominance. However, a high "force" value does not guarantee that the solution is close enough to the Pareto frontier. Therefore, further the value R is calculated for each individual, which is the sum of the values of the "forces" of individuals dominating over the one under consideration,
R ( i ) = Z S ( j ).
J e P t + P t *, j^
Thus, the value R = 0 corresponds to a non-dominated solution (Fig. 3):
4 0
У___• nondominated
-
• ■—• dominated
0 о о 5 о о 12
О о
оо
Рис. 3. Ранжирование решений в SPEA2 [15]
Fig. 3. Ranking of solutions in SPEA2 [15]
The resulting fitness F(i) of an individual is calculated as the reciprocal of R :
F (i) = —1—.(7)
1 + R (i)
After that, tournament selection, recombination, and mutation operators are applied to the solution population.
Description of numerical experiments
When using the multiobjective optimization algorithm, the problem of non-stationary optimization at each time t is considered as a separate optimization problem. There are two options for the formation of the initial population during the transition from one point in time to the next one:
-
1. Initialize the population randomly, restart the algorithm.
-
2. Use the population of solutions obtained at the previous time.
-
3. Use a population of solutions, one part of which was obtained at the previous time, and the other was randomly initialized.
It is necessary to check whether there is a difference in the accuracy of the obtained solutions and the speed of convergence between these three methods. Further, these methods will be considered using the NSGA-2 and SPEA2 multiobjective optimization algorithms as an example.
As test problems of multicriteria non-stationary optimization, we took a set of CEC2018 Dynamic Multi-objective Optimization Benchmark Problems, which includes tasks of various types. Table 1 presents the characteristics of the tasks, given in [16].
Table 1
Characteristics of test problems
|
Problem |
Quantity |
Type of change |
Notes |
|
DF1 |
2 |
Mixed convexity-concavity, change in the position of optima |
Non-stationary PF and PS |
|
DF2 |
2 |
Changing positions of optima |
Stationary convex PF, non-stationary PS |
|
DF3 |
2 |
Mixed convexity-concavity, change in the relationship between variables, change in the position of optima |
Non-stationary PF and PS |
|
DF4 |
2 |
Changing the relationship between variables, changing the values of the boundaries of PS and PF |
Non-stationary PF and PS |
|
DF5 |
2 |
Changing the number of concave and convex areas, changing the position of optima |
Non-stationary PF and PS |
|
DF6 |
2 |
Mixed convexity-concavity, multimodality, change in the position of optima |
Non-stationary PF and PS |
|
DF7 |
2 |
Changing the range of PF and the position of optima |
Non-stationary PF and PS, stationary centroid PS, convex PF |
|
DF8 |
2 |
Mixed convexity-concavity, change in the position of optima, PS points have a regular distribution structure |
Non-stationary PF and PS, stationary centroids PS, dependence between variables |
|
DF9 |
2 |
Change in the number of unconnected PF segments and the position of optima |
Non-stationary PC and PS, dependence between variables |
|
DF10 |
3 |
Mixed convexity-concavity, change in the position of optima |
Non-stationary PC and PS, dependence between variables |
|
DF11 |
3 |
Changing the size of the PF region, the range of the PF, and the position of the optima |
Non-stationary PF and PS, concave PF, dependence between variables |
|
DF13 |
3 |
Change in the number of unconnected PF segments, change in the position of optima |
Non-stationary PF and PS, PF can be a continuous concave or convex segment, or several disconnected segments |
|
DF14 |
3 |
Change in the number of concave and convex regions, change in the position of the optima |
Non-stationary PC and PS, dependence between variables |
The type of tasks changes depending on the value of the parameter t . The moment of time t in the test problems from this set is determined as follows:
1 т t =
п LT t where nt – intensity of change; τ = i∙n; i – problem iteration number; n – number of iterations of the optimization algorithm; τt – rate of change.
To assess the accuracy of the obtained solutions for multicriteria optimization problems, the IGD (Inverted Generational Distance) measure is used, which shows the degree of difference between the initial PF P and the found PF P* [17]. For problems of non-stationary multicriteria optimization, the average MIGD measure is used:
TTnP t i
MIGD = 7 EIGD ( P*, p t ) = 7 EE — , (9)
T t=1 T t=1 i=1 nPt where nPt = |Pt|; dti – Euclidean distance between i element of Pt and the nearest to it element Pt*; T – number of problem iterations.
The Hypervolume measure is also used, which shows the degree of remoteness of the front from some worst reference point, which is set manually [18]. For problems of non-stationary multicriteria optimization, the averaged measure MHV is also used:
T
MHV = 7 E HV t ( P t *), (10)
T t = 1
where HV t – hypervolume operator. In [16], it is proposed to specify the worst point as ( z 1 + 0,5, z 2 + 0,5, …, z m + 0,5), where z j –the maximum value of the j objective function in the initial PF at time t; m is the number of target functions.
When carrying out numerical experiments, the following values of test problem parameters were used:
-
- intensity of changes n τ is 10;
-
- the number of iterations of the problem T is 30;
-
- the number of problem variables is 10.
Numerical experiments were performed using two different values of rate of change τ t : 10 (fast changes) and 30 (slow changes) in order to check whether no restart gives a better result with slower changes in the problem.
Also, for the NSGA-2 and SPEA2 algorithms, the population size was set to 50 and the number of generations to 30. Each test problem was solved 20 times, the results were averaged.
Results
Table 2 shows the average IGD metrics for each test task at slow and fast rates of change and using the NSGA-2 and SPEA2 algorithms. The results are compared with each other when using a restart in the algorithm (population initialization is random), without using a restart (using a population obtained at the previous time point) and with a 50% restart (one half of the population is initialized randomly, and the other half is randomly selected solutions from population obtained at the previous point in time). Table 3 shows the average values of the HV metric.
The results were processed using the Mann-Whitney statistical test. The statistically best values of the metrics are highlighted in green (within the framework of the algorithm used); highlighting multiple columns with color means that the differences between them are not statistically significant.
IGD metric values depending on different population initialization with slow and fast changes for NSGA-2 and SPEA2 algorithms
Table 2
|
Slow change |
||||||
|
Problem |
NSGA-2 |
SPEA2 |
||||
|
With restart |
Without restart |
Restart 50 % |
With restart |
Without restart |
Restart 50 % |
|
|
DF1 |
0.16626 |
0.05562 |
0.06047 |
0.35837 |
0.19831 |
0.14915 |
|
DF2 |
0.4249 |
0.39807 |
0.34611 |
0.64654 |
0.51556 |
0.43324 |
|
DF3 |
1.07812 |
0.46373 |
0.63423 |
1.48503 |
0.29893 |
0.31623 |
|
DF4 |
1.70829 |
0.2219 |
0.23465 |
3.21155 |
0.31159 |
0.30098 |
|
DF5 |
3.27418 |
2.86193 |
3.17044 |
3.54135 |
3.44858 |
3.16089 |
|
DF6 |
5.82266 |
4.37637 |
3.9914 |
7.65581 |
10.31912 |
6.58776 |
|
DF7 |
2.88988 |
0.21077 |
0.29967 |
0.57322 |
0.14004 |
0.16273 |
|
DF8 |
0.4861 |
0.24668 |
0.46732 |
0.36439 |
0.06035 |
0.07962 |
|
DF9 |
1.11271 |
1.00767 |
0.87972 |
1.00105 |
0.77221 |
0.35849 |
|
DF10 |
0.63374 |
0.20805 |
0.28913 |
0.80103 |
0.16978 |
0.2983 |
|
DF11 |
1.33799 |
1.20587 |
1.21676 |
1.52398 |
1.248 |
1.26458 |
|
DF13 |
1.14789 |
0.82343 |
0.92381 |
1.99445 |
0.92517 |
0.59001 |
|
DF14 |
1.96974 |
2.15505 |
2.46098 |
0.86397 |
024935 |
0.24797 |
|
Fast change |
||||||
|
Problem |
NSGA-2 |
SPEA2 |
||||
|
With restart |
Without restart |
Restart 50 % |
With restart |
Without restart |
Restart 50 % |
|
|
DF1 |
0.15418 |
0.37973 |
0.1188 |
0.34685 |
0.67789 |
0.23528 |
|
DF2 |
0.43164 |
0.7622 |
0.3886 |
0.67347 |
0.98689 |
0.53114 |
|
DF3 |
0.99878 |
0.8379 |
0.91423 |
1.4139 |
0.65215 |
0.59109 |
|
DF4 |
1.75676 |
0.19023 |
0.20557 |
3.34937 |
0.30802 |
0.31553 |
|
DF5 |
5.48928 |
5.47719 |
5.51248 |
5.78571 |
6.27579 |
6.03813 |
|
DF6 |
5.83975 |
15.35728 |
7.55838 |
7.94478 |
19.964 |
7.73518 |
|
DF7 |
3.71561 |
0.41029 |
0.66258 |
0.66013 |
1.09603 |
0.562 |
|
DF8 |
0.4835 |
0.25431 |
0.46186 |
0.35465 |
0.07659 |
0.08844 |
|
DF9 |
1.06701 |
1.91676 |
1.07585 |
0.99857 |
2.52754 |
0.94053 |
|
DF10 |
0.55375 |
0.19654 |
0.24747 |
0.6755 |
0.15305 |
0.23408 |
|
DF11 |
1.31739 |
1.21583 |
1.21464 |
1.51375 |
1.25063 |
1.2498 |
|
DF13 |
1.11659 |
1.03303 |
0.91568 |
2.01859 |
3.41013 |
1.16391 |
|
DF14 |
1.96235 |
2.78436 |
2.68979 |
0.85173 |
0.51699 |
0.4661 |
Table 3
HV Metric Values Depending on Different Population Initialization with slow and fast changes for NSGA-2 and SPEA2 algorithms
|
Slow change |
||||||
|
Problem |
NSGA-2 |
SPEA2 |
||||
|
With restart |
Without restart |
Restart 50 % |
With restart |
Without restart |
Restart 50 % |
|
|
DF1 |
1.32092 |
1.54591 |
1.53165 |
0.96699 |
1.24592 |
1.34441 |
|
DF2 |
1.15173 |
1.14765 |
1.2953 |
0.7926 |
0.96943 |
1.11871 |
|
DF3 |
0.37984 |
0.84905 |
0.72257 |
0.14168 |
1.09988 |
1.07317 |
|
DF4 |
4.05769 |
7.6282 |
7.58849 |
1.28999 |
7.3678 |
7.36317 |
|
DF5 |
137.27398 |
139.51692 |
138.1649 |
111.54741 |
113.28194 |
113.31316 |
|
DF6 |
0.18186 |
0.60413 |
0.61594 |
0.0376 |
0.21177 |
0.20861 |
|
DF7 |
0.60904 |
2.95476 |
2.64463 |
2.05972 |
3.08956 |
3.00454 |
|
DF8 |
0.82234 |
1.49508 |
0.94826 |
1.03271 |
1.73879 |
1.6861 |
|
DF9 |
0.20507 |
0.39313 |
0.37082 |
0.3858 |
0.88429 |
1.05993 |
|
DF10 |
1.37764 |
2.56913 |
2.39078 |
1.10203 |
2.6405 |
2.32359 |
|
DF11 |
0.30304 |
0.50691 |
0.49764 |
0.07836 |
0.44429 |
0.41238 |
|
DF13 |
7.55833 |
10.14608 |
8.68482 |
1.08663 |
3.19273 |
4.40662 |
|
DF14 |
0.0873 |
0.06332 |
0.09364 |
0.1999 |
0.75084 |
0.73419 |
|
Fast change |
||||||
|
Problem |
NSGA-2 |
SPEA2 |
||||
|
With restart |
Without restart |
Restart 50 % |
With restart |
Without restart |
Restart 50 % |
|
|
DF1 |
1.38279 |
1.07766 |
1.45141 |
1.02725 |
0.80304 |
1.22049 |
|
DF2 |
1.14435 |
0.70886 |
1.20913 |
0.75946 |
0.5301 |
0.95102 |
|
DF3 |
0.43748 |
0.66908 |
0.60571 |
0.19885 |
0.19885 |
0.77118 |
|
DF4 |
3.37641 |
6.5282 |
6.4919 |
0.94274 |
6.24129 |
6.20666 |
|
DF5 |
294.16315 |
295.48085 |
295.87608 |
238.39456 |
236.6676 |
240.46001 |
|
DF6 |
0.17802 |
0.29026 |
0.28404 |
0.03593 |
0.07157 |
0.12937 |
|
DF7 |
0.97366 |
3.33281 |
2.84268 |
2.64918 |
3.08993 |
3.28456 |
|
DF8 |
0.85182 |
1.51224 |
0.9437 |
1.0689 |
1.74353 |
1.70175 |
|
DF9 |
0.24943 |
0.121 |
0.2484 |
0.40496 |
0.17604 |
0.45905 |
|
DF10 |
1.72413 |
2.72373 |
2.60652 |
1.4608 |
2.79819 |
2.55707 |
|
DF11 |
0.33402 |
0.53781 |
0.53404 |
0.08475 |
0.47655 |
0.45826 |
|
DF13 |
7.66373 |
9.09398 |
8.21799 |
1.11795 |
1.1479 |
2.48469 |
|
DF14 |
0.0907 |
0.04726 |
0.08153 |
0.2078 |
0.45549 |
0.44884 |
From the results presented in the table, it can be seen that in the case of slow changes in solving most test problems, the use of the population obtained in the previous step is the most effective. However, in the case of fast changes, you can see an increase in the number of problems for which the use of a restart (either full or 50%) is most effective. This is due to the fact that with fast changes, the state of the problem at the previous step differs from the state at the current step to a greater extent compared to slow changes.
Figure 4 shows diagrams of the rank values assigned to the metric value for each of the six variants of the algorithm and summarized over all test problems. For the best value of the metric, the highest rank was assigned. To ensure the reliability of the ranking, a test of the significance of differences in the results was carried out using the criterion Mann-Whitney: the test was applied to a pair of closely ranked results. If the differences are insignificant, then these two results were assigned the average value of their ranks. It can be seen that there is no significant difference between the use of the NSGA-2 algorithm and
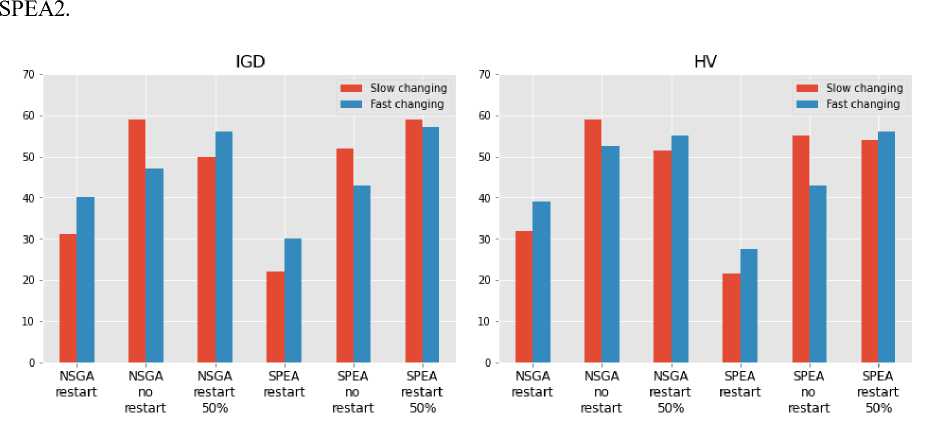
Рис. 4. Диаграммы значений суммарных рангов использованных алгоритмов
Fig. 4. Diagrams of the ranks values of the algorithms
Figures 5 and 6, using the example of two test problems, show graphs of the change in the values of the metrics IGD and HV at each iteration of the NSGA-2 algorithm with slow (top) and fast (bottom) changes. You can see that every 30 iterations of the algorithm there is a abrupt jump in the values of the metrics, at this moment a change in the problem happens.
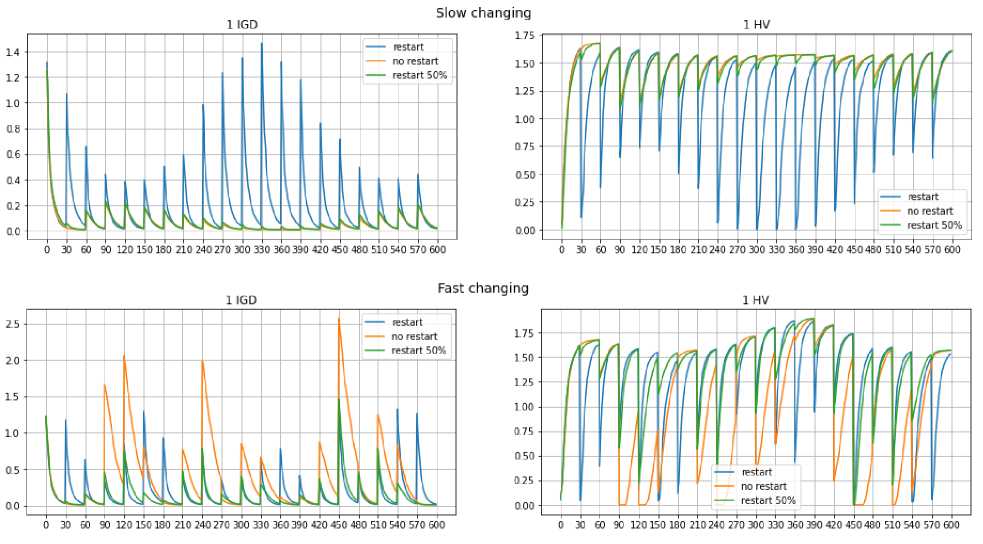
Рис. 5. Изменение значений метрик на примере задачи DF1 при медленных и быстрых изменениях
Fig. 5. Changing values of IGD and HV metrics in DF1 problem in the cases of slow and fast changes
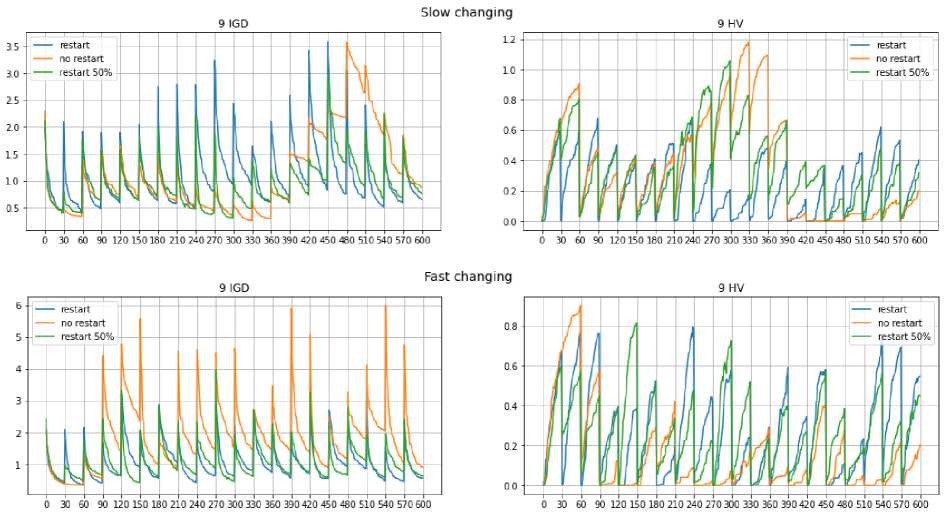
Рис. 6. Изменение значений метрик на примере задачи DF9 при медленных и быстрых изменениях
Fig. 6. Changing values of IGD and HV metrics in DF9 problem in the cases of slow and fast changes
With rapid changes in tasks DF1 and DF9, you can see that in the absence of a restart, the error value when changes occur is much higher compared to using a restart. Also in problem DF9 with slow changes it is seen that at the first iterations algorithm in the absence of a restart, a low error value is observed, however, at subsequent steps of the algorithm, the error increases. This suggests that within the same problem, it is necessary to use different approaches depending on the degree of changes that occur.
Conclusion
On a set of test problems of multi-criteria non-stationary optimization using the NSGA-2 and SPEA2 algorithms, three approaches to the formation of a population in emergence of changes in the problem were considered. It was shown that the efficiency of using a population of solutions obtained at a previous point in time depends on the rate of change in the problem.
With slow changes on most test problems, the best result is shown by the approach that involves the use of a population consisting only of solutions obtained at the previous point in time, since the type of problem does not change much. However, with rapid changes, it is not possible to single out any of the three possible approaches as preferable, since all three approaches have approximately the same ratio of test problems in which their use was the most effective. This implies the need to track the intensity of changes occurring in the task, and on the basis of this information to make a choice in favor of one or another approach to forming a population.
References The comparison of efficiency of the population for-mation approaches in the dynamic multi-objective optimization problems
- Yazdani D., Cheng R. A Survey of Evolutionary Continuous Dynamic Optimization Over Two Decades–Part A. IEEE Transactions on Evolutionary Computation. 2021, No. 25(4), P. 609–629.
- Zhang J., Xing L. A Survey of Multiobjective Evolutionary Algorithms. 22017 IEEE Interna-tional Conference on Computational Science and Engineering (CSE) and IEEE International Confer-ence on Embedded and Ubiquitous Computing (EUC), 2017.
- Nguyen T. T., Yang S., Branke J. Evolutionary dynamic optimization: A survey of the state of the art. Swarm and Evolutionary Computation. 2012, No. 6, P. 1–24.
- Azzouz R., Bechikh S., Ben Said L. Dynamic Multi-objective Optimization Using Evolutionary Algorithms: A Survey. Adaptation, Learning, and Optimization. 2016, P. 31–70.
- Yazdani D., Cheng R. A Survey of Evolutionary Continuous Dynamic Optimization Over Two Decades–Part B. IEEE Transactions on Evolutionary Computation. 2021, No. 25(4), P. 630–650.
- Li C., Yang S. A general framework of multipopulation methods with clustering in indetectable dynamic environments. IEEE Trans. Evol. Comput. 2012, No. 16(4), P. 556–577.
- Deb K., Karthik S. Dynamic multi-objective optimization and decision-making using modified NSGA-II: a case study on hydro-thermal power scheduling. Lecture Notes in Computer Science. 2007, P. 803–817.
- Muruganantham A., Tan K., Vadakkepat P. Evolutionary dynamic multiobjective optimization via kalman filter prediction. IEEE Trans. Evol. Comput. 2016, No. 46(12), P. 2862–2873.
- Zhang Q., Jiang S., Yang S., Song H. Solving dynamic multi-objective problems with a new prediction-based optimization algorithm. PLoS ONE. 2021, No. 16(8).
- Branke J. Memory enhanced evolutionary algorithms for changing optimization problems. Proceedings of the 1999 congress on evolutionary computation, Institute of Electrical and Electronics Engineers, 1999.
- Goh C., Tan K. A competitive-cooperative coevolutionary paradigm for dynamic multiobjec-tive optimization. IEEE Trans. Evol. Comput. 2009, No. 13(1), P. 103–127.
- Branke J., Kaussler T., Smidt C., Schmeck H. A Multi-population approach to dynamic opti-mizaton problems. Evolutionary Design and Manufacture, Springer Science mathplus Business Media. 2000, P. 299–307.
- Li C., Yang S. Fast Multi-Swarm Optimization for dynamic optimization problems. 2008 Fourth International conference on Natural Computation, Institute of Electrical and Electronics Engi-neers, 2008.
- Deb K., Pratap A., Agarwal S., Meyarivan T. A Fast and Elitist Multiobjective Genetic Algo-rithm: NSGA-II. Ieee transactions on evolutionary computation. 2002, No. 6 (2), P. 182–197.
- Zitzler E., Laumanns M., Thiele L. SPEA2: Improving the Strength Pareto Evolutionary Algo-rithm. Computer Engineering and Networks Laboratory (TIK), Department of Electrical Engineering, Swiss Federal Institute of Technology (ETH), Zurich, 2001.
- Jiang S., Yang S., Yao X., Chen Tan K., Kaiser M. Benchmark Problems for CEC2018 Com-petition on Dynamic Multiobjective Optimisation. CEC2018 Competition, 2018.
- Zhang Q., Yang S., Wang R. Novel Prediction Strategies for Dynamic Multiobjective optimi-zation. IEEE Trans. Evol. Comput., 2020, 24(2), P. 260–274.
- Rong M., Gong D., Pedrycz W., Wang L. A multimodel prediction method for dynamic multi-obejctive evolutionary optimization. IEEE Trans. Evol. Comput. 2020, No. 24(2), P. 290–304.
