The Method of Restoring Parameters of Mobile Agents in a Unified Dynamic Environment Considering Similarity Coefficients

Author: Valerii Zavgorodnii, Nadiya Braykovska, Oleksandr Yarovyi, Anna Zavgorodnya, Viacheslav Liskin, Oleg Mukhin
Journal: International Journal of Computer Network and Information Security @ijcnis
Article in issue: 4 vol.15, 2023.
Free access
We described the placing of the mobile agents in a dynamic environment. It formed a dynamic environment for a complex of dynamically changing mobile agents. We described a two-level system of connections at the global and local levels of interaction. Such a scheme allows you to support the survivability of a dynamic environment. We presented the model of placement of mobile agents in a dynamic environment, which forms the basis of the trajectory of interaction between mobile agents, enabling us to combine the dynamic environment into a unified dynamic environment. The proposed method for mobile agents parameters restoring in a unified dynamic environment, taking into account the similarity coefficients, allows restore 80% parameters of an inaccessible mobile agent. This indicates the high efficiency of the objects description in the form of a unified dynamic environment in order to maintain its integrity.
A Unified Dynamic Environment, Mobile Agent, Interaction Trajectory, Similarity Coefficients, Interaction Matrix, Parameter Recovery, Placement Methods
Short address: https://sciup.org/15018631
IDR: 15018631 | DOI: 10.5815/ijcnis.2023.04.03
Text of the scientific article The Method of Restoring Parameters of Mobile Agents in a Unified Dynamic Environment Considering Similarity Coefficients
The unified dynamic environment (UDE) is an information model of a complex subject area [1, 2]. It includes information objects – mobile agents (MA), connections between them, the environment and processes that accompany the creation and operation of a unified dynamic environment (information space).
Mobile agents are moving objects that are both software-controlled and may move free in a physical threedimensional space – a dynamic environment. Examples of such mobile agents are unmanned aerial vehicles - an aircraft designed to fly without a pilot on board, the flight of which is controlled and controlled by an appropriate program or with the special control station located outside the aircraft [3, 4]. Unmanned aerial vehicles can fly under the remote control of a human operator, like a remotely piloted aircraft, or with varying degrees of autonomy, such as assisted by an autopilot, all the way to fully autonomous, with no human intervention.
The study [5, 6] analyzes the relationship between the concepts of static, semi-dynamic and dynamic environments. If the environment can change while the mobile agent chooses the next action, then the environment is dynamic for that mobile agent, otherwise the environment is static. If the environment itself does not change over time, but the performance indicators of the mobile agent change, then this is a semi-dynamic environment.
We suggest a unified dynamic environment provides for unified data entry, their storage in unified formats, and unified information exchange between all mobile agents.
We form a unified dynamic environment and the information system collects information from heterogeneous data sources presented in various forms and formats, while heterogeneous computer systems can perform the processing of incoming data [7–12].
It forms a unified dynamic environment based on the information system and performs the following [7, 13–16].
-
• collects information from data sources that are presented in various formats;
-
• converts information about mobile agents;
-
• forms a unified dynamic environment;
-
• provides users with information about mobile agents.
The formation of a unified dynamic environment requires the unification of data received from heterogeneous sources and implement the mechanism for converting such formats. There is a contradiction between the heterogeneous nature of the features of mobile agents and the requirement for a unified presentation of data [8, 17–19]. It must uniquely identify the mobile agent with its parameters received from different sensors.
The goal of the paper is:
• to consider the concepts and principles of unified dynamic environment forming and the description and the interaction of mobile agents there;
• to suggest a method for mobile agent’s parameters restoring in a unified dynamic environment taking into account the similarity coefficients.
2. Literature Survey
Creation of a unified dynamic environment designed to provide a unified description of mobile agents for all users, so that all users of a unified dynamic environment perceived the same mobile agent in the same way. This characteristic is the main property of a unified dynamic environment [20, 21].
To form a unified dynamic environment, it is necessary to implement uniform data entry, store data in uniform formats, and exchange information between all mobile agents. It changes dynamically information about mobile agents in a unified dynamic environment [7, 22].
In practical applications, a unified dynamic environment includes a set of data, databases and databanks, technologies for their management and use, information and telecommunication systems and networks that function based on uniform principles and according to general rules, which ensures information interaction of mobile agents [4, 22]. When the connection with a mobile agent is lost, the other mobile agents have to collect certain information about it based on their interaction.
We can find a description of modern technologies for presentation and integration of disparate data in [10]. They describe the method of integration of disparate spatial data, based on the concept of metadata in modern automated systems of information management and interaction. This method allows you to bypass the shortcomings mentioned in the work. However, despite its advantages, the question of organizing means to support the transformation of mobile agents remains open.
In [23], a complex method developed that increases the efficiency of processing various types of data in intelligent systems. The proposed technique makes it possible to increase the efficiency of the functioning of intelligent decision support systems due to the complex processing of data circulating in them. The disadvantage of this technique is the need to process large data sets to determine the state of the monitoring object.
In [24] considered the principles of creating a unified dynamic environment based on the regularizing Bayesian approach and intelligent technologies that implement it. A unified dynamic environment Gu with its multifactorial, geographical and temporal distribution, represents a complex mobile agent that actively interacts with the environment. Formation of a dynamic environment based on computer systems Gm is a modeling a real dynamic environment in which homomorphic transformations of the form are implemented:
G u ^ Gm. (1)
Among the components Gm of the environment are model representations of the objects of the surrounding world, created by the subjects of the environment – sources of information. Such sources, by the principle of their functioning, always generate incomplete, unclear and inaccurate information, which creates the basis of a dynamic environment. Then, the dynamic environment G can be represented as a set. Based on the methodology of the regularizing Bayesian approach in the form of a composition of information resources of its components, represented by sets of dynamic subenvironments Gt, where i is the number of information sources:
Gm = O ‘=i Gmi. (2)
The dynamic environment is multidimensional. For each dimension, there is information that determines the state of the field according to this dimension [23]. In order to ensure the stability of assessments of this state based on incomplete, inaccurate, unclear information, regularizing technologies are used, according to which, for each measurement, its parameters are determined Gsmt , for which, in turn, scales with dynamic restrictions built using Bayesian intelligent measurement technologies. We divide measurement parameters into directly measured and indirectly measured. Depending on the type of parameters, the types of dynamic limitation scales (parametric or functional) selected. The construction of a hyper-scale of a unified dynamic environment Gsu based on the convolution of scales Gsmt :
G smt = П ;=1 П ;=1 G s;mi • (3)
The appropriate types of scales of dynamic limitation allows preserving the principle of unity of measurements, which ensures stability, quality control and risk management of decisions [24, 25].
The work [10] describes the method of integration of heterogeneous geospatial data based on the concept of metadata in modern automated information support systems.
To create a unified dynamic environment, cloud storages are now used, which allow free use of large volumes of data [4, 12, 18]. In turn, such a unified dynamic environment should have sufficient functionality that will allow working with data in a unified format. We can find the development of views on data formalization in works [26–28], which describe a system model for integrating content from cloud storage into a unified dynamic environment, as well as the results of its implementation. Despite the fact, that we can use the developed solution in context of educational projects for a unified dynamic environment, we presented only conceptually the proposed model and has no practical confirmation [10, 25, 29].
Thus, a unified dynamic environment is a set of tools that support the unity of presentation, processing, and interpretation of information about mobile agents. The creation of a unified dynamic environment designed to provide access to general information without limitations of place and time.
3. Scheme of the Existence of a Set of Dynamic Environments
A set of dynamic environments may include different dynamic environments with different characteristics and properties. We can use these dynamic environments for various purposes, such as storage, processing and transmission of information.
Consider the set of dynamic environments ( DE ), consisting of DE1,DE2, ..,DEm, where m is the number of such environments. Each dynamic environment contains a unique set of mobile agents ( MA ), denoted as MA1,MA2, ..., MAk, where k is the number of mobile agents. Each mobile agent has a set of parameters, denoted as P1, P2, ..., Pn, where n is the number of parameters. Thus, each mobile agent can be represented as MAk(P1, P2, ..., Pn). It is important to note that all mobile agents have the same number of parameters, and we set any missing parameters to NONE .
To ensure consistency, all mobile agent parameters must be in the same format and the number of parameters must be the same for all agents. It is also possible that different dynamic environments may contain the same mobile agents, i.e. DE1(MA1) = DEm(MAk).
External sources of information can represent input objects ( IO ) in different ways, denoted as IO1,IO2, ..,I0t , where i is the number of input objects. Data about these objects, as a set of attribute values, obtained by reading them using sensors.
Since no two mobile agents are identical exactly in a dynamic environment MA1 ^ MA2 ^ — ^ MAk, we can see the dynamic environment as a reference system that needs constant updating and replenishment. It can achieve this by following these steps:
1. Create a dynamic environment containing a collection of unique mobile agents. This allows recognition of incoming objects without binding to a specific mobile agent.
2. With the sensors, which are meters, read the signs of the input object. If the sensor cannot do this, the information about this parameter will be absent and corresponds to the value NONE.
3. The system accepts an input object I0t with a set of attributes. The sensors read the values of the features, the dynamic environment performs identification of the input object by its features to determine whether there is a corresponding mobile agent with the same set of features.
4. The Placing of the Mobile Agents in a Unified Dynamic Environment
A unified dynamic environment is discrete by its nature. We present a mathematical model for mobile agents placement in a unified dynamic environment based on the set-theoretical formalism.
The main concept of this model is the concept of a mobile agent, each of which characterized by a set of parameters and their values. Then, a mobile agent can represented as a set of ordered parameter-value pairs. That is:
ma = {< pvX 1 >,< p2,x2 >,...,< pvX 1 >}; pt * p j ; i * j; i,j e [1,n], (4)
where p is the name of the parameter, x is the value of the parameter.
Consider the information scheme that describes dynamic environment in the form of a set of parameters mobile agents, which are its components. We will present such an information scheme as a tuple:
Sch = ,
where Р = {p1,p2, — >p k } is a set of parameters of mobile agents; X = {X1,X2,. ,Xm"} - set of sets of possible parameter values; Т = { t1, t2,..., t / } - multiple types of agents; G): P ^ X - a display that matches each parameter of the mobile agent with a set of its possible values; ^:T ^ 2 P - a display that sets for each type a set of parameters of its elements.
We will present a dynamic environment built according to the following information scheme Sch as a tuple:
DE
Sch
=
where Sch =< P,X,T,w,^ > is the information scheme; MA = {ma1, ma2,.., man} - a set of dynamic environments; Л: MA ^ T - display that matches the object with its type.
The following conditions met for any information object ma e MA:
-
1) the set of attributes corresponds to the type {p: < p, x >e ma} = ^(ma));
-
2) for any "parameter-value" pair < p,x >e ma, the statement is true x e w(p).
We will set the update of the dynamic environment by the following display:
R:SDESck ^ SDESck,(7)
where SDE^: h is the set of all dynamic environments built according to the information scheme Sch.
Let us present a set of dynamic environments:
DE^h = {DE^, DE where DEtSch =< Scht,MAt,At > and Scht =< Pt,Xt,Tt,wt,^t > we introduce the notation: {Sch1,Sch2,.,SchN}, I5 = и?=1Рь X = Jtv=1Xt, T = UV=1Tt, MA = Jtv=1MAt. We combine multiple dynamic environments DESch- into a unified dynamic environment under the condition of the existence of mappings ш: P ^ X, ip:T ^2P, y:MA^T that are extensions of the corresponding mappings Wt,^t,Yt(1 We present the model of a unified dynamic environment as a tuple: UDE =< Sch, DESch, D, R >, (9) where Sch is the information scheme; DESch- - a dynamic environment built according to an information scheme Sch; D = {d1,d2, ..,dl} - a set of semantic dependencies; R: SDESch^ SDESch - the display is such ^DE5^ e SDESch,^d e D that we executed it d(R(DESch)). Then, for any one DE, Sch, D can build a model of a unified dynamic environment < Sch, DESch, D, R >, in which the mapping R has the following form: R = ({ma1,ma2, .,man}) = {ma‘,ma2, .,man}, (10) Then, the relation matrices have the following form: / 0-1-11 1 1\ /0-1-11 1 1 0 -1 1 1 1\ /10 111 1 1 n 1 1 1 1 1 n 1 1 M(MA1)= -1 -1 -1 0 -1 1 ; m(ma2^= -1 -1 -1 0 1 -1 -1 -1 1 0 1 -1 -1 -1 -1 0 -1 -1 -1 -1 -1 0 -1 -1 -1 -1 -1 11 1 0/ where та ■ = {< p^ x1 >,< p2,x2 >,...,< pkt, xkt >}, {plj(iok), if33iok,d1 e D, like d1:y(iok) ^y(iof), such that d1(iok, io[) and pi e P; pl(ioi), otherwise. Moreover, the given display R will be the only one. This model is the basis to the formation of the trajectory of interaction between mobile agents, and with it is possible to apply the technologies of combining the dynamic environment into a unified dynamic environment. 5. Interaction of Mobile Agents in a Dynamic Environment Let us consider the matrix method of presenting information on relations. The elements of the matrix of relations of the dynamic environment та^ correspond to the elements of the set MA. Let mobile agents in a dynamic environment have a relation of partial or linear order. If the element pi precedes the element pj, then we set the value 1 at the intersection of the i-th row and the j-th column, otherwise - the value 0, i.e.: . [ 1, if (pi/pj) e io ioij = {0, if (pbpf) e io" To represent the relation of linear order, we will use a matrix M(MA) with the following elements: ( 1 if(pi,pj) e io, (pj,pi) e io M(io) = { 0, if (pt,pj) e io, (pj,pi) e io . (12) (-1, if (pi,pj') e IO,pPj,pf) e 10 The degree of closeness of the relationship between mobile agents meets the following conditions: (d(io1,io2) > 0,d(io1,io2) = 0,whenio1 = io2 d(io1,io2) = d(io2,io1) d(io1,io2) < d(io1,io3) + d(io3,io2) 1' Let two mobile agents ranked by parameters pi(i = 1,5): MA1 (a p; vp;/ ; MA2 p: vp;/ Distinguishing elements of matrix relations M(MA1) and M(MA2) there are the following elements: та23, та32,та:5 and та54. Therefore, the value of the measure of closeness between mobile agents MA1 and MA2 is d(MA1,MA2) = 4. Thus, the number of intermediaries between mobile agents is defined as a measure of proximity between them. Let's imagine that the mobile agent MA3 is currently unavailable for some reason (no connection), so its parameters are unknown. At the same time, this mobile agent (MA3) interacted according to some parameters with other mobile agents (MA2 and MA4) and data about these parameters remained there. Based on those mobile agents (MA2 and MA4) that interacted with the mobile agent MA3 in a certain way, it is possible to extract the parameters of the mobile agent MA3 and subsequently build the interaction matrix of the parameters of the mobile agents (Fig.1). Fig.1. Interaction matrix of mobile agents parameters To restore the parameters of the mobile agent, we will use similarity coefficients. If the dynamic environment knows the number of parameters for each mobile agent and information about the number of pairwise matching parameters between mobile agents, then to calculate the similarity coefficient we will use: Pij = "ij"i+nj-nij ,(0 < P< 1), where n^ - number of identical parameters; ni’Tij - the number of identical parameters in the i-th and j-th objects, respectively. If the information about matching parameters between mobile agents is replaced by information about nonmatching parameters, then (15) or (16) we used to calculate the similarity coefficient: "j Pij "ij+^ij’ 2"ij Pij "" 2"ij+lij’ where nij - number of identical parameters; 1^ is the total number of non-matching parameters. If we know the total number of parameters of mobile agents and the total number of matching parameters to the dynamic environment, then to calculate the similarity coefficient, we will use: Pij = kij ’ m where k^ - the total number of matching parameters; m is the total number of parameters. If information about the total number of non-matching parameters is added to this information, then (18) or (19) we used to calculate the similarity coefficient: Pij = kij-iij ’ m kij Pij —2m-kij __ kij m+lij’ where kij - the total number of matching parameters; l^ - the total number of non-matching parameters; m is the total number of parameters. If we know the number of matching parameters between mobile agents and the total number of parameters to the dynamic environment, then to calculate the similarity coefficient, we will use: "ij Pij=m, where n^j - number of identical parameters; m is the total number of parameters. We will calculate the weighted trust factor based on the similarity coefficients of mobile agents and the number of intermediaries between them: i] = e^H where p^ - similarity coefficient between i-th and j-th mobile agents; dl] - the number of intermediaries between the i-th and j-th mobile agents, calculated according to the measure of their proximity; dmax - the maximum number of mediators between the most distant mobile agents of the dynamic environment, calculated according to the measure of their proximity.
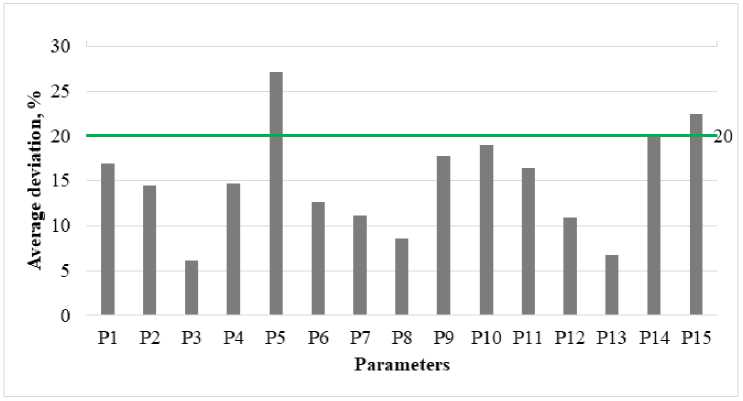
6. The Experimental Research We, basing on the matrix of interaction of parameters of mobile agents and considering similarity coefficients, analyzed the restoration of parameters of mobile agents in a dynamic environment. To conduct experiments, we formed a unified dynamic environment with 100 mobile agents. 15 parameters describe each mobile agent. We select one agent as unavailable, i.e. its parameters are unknown. The purpose of the experiment is to establish the deviation of the restored values of the parameters of the unavailable mobile agent, that is, to evaluate the effectiveness of the representation of agents as a unified dynamic environment in order to maintain its integrity. For this, the average deviations of parameter values are determined on basis of the interaction matrix of parameters of mobile agents, considering similarity coefficients. In case of a deviation less than 20%, the parameter considered as restored with a sufficient level of reliability. Below is a snippet of the 10 mobile agents of a unified dynamic environment: Fig.2. Comparative graph of the effectiveness of restoring the parameters of an unavailable mobile agent based on parameter interaction matrices in a unified dynamic environment МА1 МА2 MA3 MA4 MA5 MA6 MA7 MA8 MA9 MA10 P1 23,89 26,69 34,81 31,92 5,04 15,67 15,93 5,82 5,60 5,15 P2 20,20 14,78 2,18 20,22 19,56 12,98 NONE 16,67 16,61 2,20 P3 12,14 1,869 8,74 7,12 1,22 10,48 3,81 1,53 1,19 9,75 P4 1,93 12,96 5,15 18,44 NONE 1,63 2,30 5,67 5,30 34,72 P5 30,44 40,11 29,44 30,56 29,33 23,89 18,44 29,28 23,94 29,28 P6 23,00 NONE 13,67 20,25 8,33 2,67 12,00 14,75 13,67 25,75 P7 18,25 3,20 1,20 12,00 23,00 23,75 18,25 NONE 3,20 3,40 P8 8,00 13,00 8,62 NONE 3,75 10,00 1,00 9,00 8,62 11,00 P9 25,75 20,25 NONE 17,50 6,33 6,33 15,67 20,25 23,00 23,00 P10 21,90 23,00 23,00 12,50 32,10 NONE 28,5 23,00 6,50 17,50 P11 21,39 2,52 2,56 24,11 24,56 26,89 4,74 2,37 13,26 24,19 P12 8,378 6,78 11,43 20,46 NONE 27,42 4,64 2,92 27,39 0,33 P13 NONE 4,22 2,07 3,38 8,40 7,42 3,53 9,11 9,98 9,09 P14 11,96 29,47 8,56 29,50 9,56 24,22 2,60 16,85 NONE 35,00 P15 30,00 18,61 24,11 18,61 29,61 18,72 13,28 29,67 13,22 7,94 Table 1 demonstrates the values of the deviations of the restored parameters of the unavailable mobile agent and the average values of these deviations for each parameter. Figure 2 demonstrates a comparative graph of the restoring effectiveness of the parameters of an unavailable mobile agent based on parameter interaction matrices in a unified dynamic environment. Figure 2 shows that with a sufficient confidence level of 20%, 80% of the parameters of an unavailable mobile agent can be recovered. Applying the considered method, the deviation of the restored values of the parameters of the unavailable mobile agent was determined experimentally and compared with the sufficient level of reliability of the restoration of the parameters of the mobile agents. This made it possible to highly evaluate the effectiveness of agents presenting as a unified dynamic environment in order to maintain its integrity. Table 1. Deviation of the parameter value of the unavailable mobile agent depending on the percentage of unknown values of other mobile agents in the dynamic environment Parameters Deviation of the parameter value at a certain percentage of unknown values of other mobile agents of the dynamic environment, % Average deviation, % 0 10 20 30 40 50 P1 17,05 16,60 15,71 13,93 18,18 20,31 16,96 P2 15,31 16,03 15,89 13,44 12,07 13,77 14,42 P3 5,78 5,52 5,69 6,67 7,87 4,93 6,08 P4 10,41 15,15 13,62 15,72 17,36 15,83 14,68 P5 28,47 30,51 28,43 24,42 30,26 20,90 27,17 P6 13,51 15,27 10,38 13,98 9,65 13,18 12,66 P7 10,72 9,20 11,22 10,97 10,71 14,00 11,14 P8 8,11 9,31 7,27 9,35 6,67 11,04 8,63 P9 16,81 17,73 18,04 17,69 21,84 14,44 17,76 P10 19,85 18,89 22,75 14,51 17,44 20,96 19,07 P11 14,65 15,78 18,52 16,17 17,21 16,56 16,48 P12 12,08 14,40 9,28 7,82 8,53 13,67 10,96 P13 6,37 5,99 5,83 6,73 8,07 7,27 6,71 P14 17,27 18,60 19,31 21,07 24,07 20,45 20,13 P15 20,37 21,53 22,75 23,60 24,12 22,08 22,41
7. Conclusions The paper describes the placing mobile agents in a dynamic environment. We formed a dynamic environment for a complex of dynamically changing agents. A two-level system of connections at the global and local levels of interaction considered. Such a scheme allows you to support the survivability of a dynamic environment. The model of placement of mobile agents in a unified dynamic environment presented, which is the basis of the formation of the trajectory of interaction between mobile agents, which allow apply the technologies of combining dynamic environments into a unified dynamic environment. The received results of experimental studies show that the method of restoring the parameters of mobile agents in a dynamic environment allows us to draw conclusions about the high efficiency of presenting objects as unified dynamic environments in order to maintain its integrity. The proposed method for mobile agents parameters restoring in a unified dynamic environment, taking into account the similarity coefficients, allows to restore 80% the parameters of an inaccessible mobile agent. On basis of the matrix of interaction of parameters of mobile agents considering similarity coefficients, it is possible to consider the restoration of parameters of mobile agents in the dynamic environment. The experiments show that identification depends significantly on the number of parameters of the mobile agent. Thus, a perspective direction of research is the development of special methods of identification of mobile agents in a unified dynamic environment. This will allow increase the efficiency of identification of a mobile agent in the case of an increase in the number of its parameters.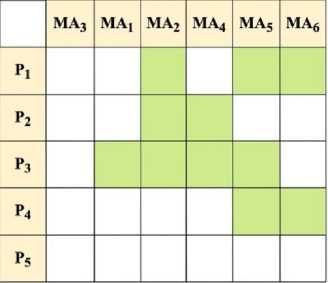
References The Method of Restoring Parameters of Mobile Agents in a Unified Dynamic Environment Considering Similarity Coefficients
- Liu, J., Wu, J. (2001) Multiagent Robotic Systems (1st ed.). CRC Press. DOI: https://doi.org/10.1201/9781315220406
- Murray, R. M. (2007) Recent Research in Cooperative Control of Multivehicle Systems. ASME. J. Dyn. Sys., Meas., Control. Vol. 129(5). P.571-583. DOI: https://doi.org/10.1115/1.2766721
- Husynin, A.V., Yarovy, O.V., Antonova-Rafi, Yu.V. (2017) Optimization of airship landing control based on the multi-stage method of differential transformations. Control, navigation and communication systems. Vol. 5 (45). P. 12-17. Access mode: http://journals.nupp.edu.ua/sunz/article/view/424
- Cortes, J., Martinez, S., Karatas, T., Bullo, F. (2002) Coverage control for mobile sensing networks. IEEE Conference on Robotics and Automation. Arlington, VA, P. 1327-1332. DOI: https://doi.org/10.48550/arXiv.math/0212212
- Howard, A., Matarić, M.J., Sukhatme, G.S. (2002) Mobile Sensor Network Deployment using Potential Fields: A Distributed, Scalable Solution to the Area Coverage Problem. International Symposium on Distributed Autonomous Robotic Systems. Fukuoka, Japan, June 25-27. DOI: https://doi.org/10.1007/978-4-431-65941-9_30
- Gusynin, A., Yarovoy, O., Antonova-Rafi, Ju., Khudetskyy, I. (2017) Synthesis of optimal multi-step control algorithms by UAVs based on differential-and-game approach. IEEE 4th International Conference "Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD)". P. 100-103. DOI: https://doi.org/10.1109/APUAVD.2017.8308785
- Paley, D., Zhang, F., Leonard, N. (2006) Cooperative Control for Ocean Sampling: The Glider Coordinated Control System. IEEE Transactions On Control Systems Technology. Vol. 16(4). P. 735-744. DOI: https://doi.org/10.1109/TCST.2007.912238
- Golembo, V.A., Bochkaryev, O.Yu., Tsyzh, A.M. (2006) The task of forming individual zones of responsibility by a team of mobile agents. Visn. National Lviv Polytechnic University. Vol. 573. P. 62-67.
- Zhengbing, H., Mukhin, V., Kornaga, Y., Volokyta, A., Herasymenko, O. (2017) The scheduler for distributed computer systems based on the network centric approach to resources control. 9th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS). Bucharest. Romania. P.518–523. DOI: https://doi.org/10.1109/IDAACS.2017.8095135.
- Bochkarev, O. Yu., Golembo, V. A., Tsyzh, A. M. (2008) Collective behavior of mobile agents in problems of uniform distribution of a limited territory. Visnyk Nats. Lviv Polytechnic University "Computer Systems and Networks". Vol. 630. P. 31-35. Access mode: https://vlp.com.ua/files/06_23.pdf
- Golembo, V. A., Bochkaryev, O. Yu., Popadyuk, H. R. (2007) The problem of algorithmic provision of collective behavior of autonomous mobile agents in tasks of spatial self-organization. Visnyk Nats. Lviv Polytechnic University "Computer Systems and Networks". Vol. 603. P. 26-30. Access mode: https://vlp.com.ua/files/06_22.pdf
- Yarovy, O., Zavhorodniy, V. (2022) Implementation of monitoring of ground objects and selection of the optimal model of a mobile agent. Abstracts of reports of the 1st international scientific and practical conference "Cybersecurity of state institutions and overcoming crisis situations". ISZZI KPI named after Igor Sikorskyi. P. 182-183.
- Korolyuk, N. A., Eremenko, S. N. (2015) Intelligent decision support system for controlling unmanned aerial vehicles at a ground control station. Information processing systems. No 8 (133). P. 31-36.
- Mukhin, V., Zavgorodnii, V., Kornaga, Y., Baranovska, L. (2021). Algorithm for the Information Space Forming and the Evaluation of Input Objects Search Efficiency. CEUR Workshop Proceedingsthis link is disabled. 3241. P. 193–204. https://ceur-ws.org/Vol-3241/paper18.pdf
- Dodonov, A., Mukhin, V., Zavgorodnii, V., Kornaga, Ya., Zavgorodnya A. (2021). Method of searching for information objects in unified information space. System research and information technologies. N1. P. 34–46. DOI: https://doi.org/10.20535/SRIT.2308-8893.2021.1.03
- Mukhin, V., Kornaga, Y., Bazaliy, M., Zavgorodnii, V., Krysak, I., Mukhin, O. (2020) Obfuscation Code Technics Based on Neural Networks Mechanism. IEEE 2nd International Conference on System Analysis & Intelligent Computing (SAIC). Kyiv. Ukraine. P. 1–6. DOI: https://doi.org/10.1109/SAIC51296.2020.9239247.
- Golembo, V.A., Bochkaryev, O.Yu., Kuspis, O.P. (2007) The problem of organizing the movement of a mobile measuring agent as part of a distributed system of autonomous research. Measuring technology and metrology. Vol. 67. P.78-82. Access mode: https://oldena.lpnu.ua/bitstream/ntb/6512/1/15.pdf
- Yarovyi, O.V. (2018) Unmanned aerial vehicle control systems for monitoring ground objects. Control, navigation and communication systems. Vol. 3 (49). P. 33-38. Access mode: http://nbuv.gov.ua/UJRN/suntz_2018_3_8
- Mukhin, V., Kornaga. Y., Tkach, M., Herasymenko, O., Bazaka, Y., Mukhin, O. (2020) Subtask Prioritization on Workflow Execution in Distributed Wireless Computer System With Network-Centric Approach to Resource Control. IEEE 5th International Symposium on Smart and Wireless Systems within the Conferences on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS-SWS). Dortmund. Germany. P. 1–5. DOI: https://doi.org/10.1109/IDAACS-SWS50031.2020.9297087.
- Jilkov, V. P., Rong Li, X., DelBalzo, D. (2007) Best combination of multiple objectives for UAV search & track path optimization. 10th International Conference on Information Fusion Date of Conference. Quebec, QC, Canada, P. 1-8. DOI: https://doi.org/10.1109/ICIF.2007.4408202
- Mukhin, V., Zavgorodnii, V., Kornaga, Y., Zavgorodnya, A., Krylov, I., Rybalochka, A., Kornaga, V., Belous, R. (2021). Devising a method to identify an incoming object based on the combination of unified information spaces. Eastern-European Journal of Enterprise Technologies. 3(2 (111). P. 35–44. DOI: https://doi.org/10.15587/1729-4061.2021.229568
- Milov, O., Yevseiev, S., Ivanchenko, Y., Milevskyi, S., Nesterov, O., Puchkov, O., Salii, A., Tymochko, O., Tiurin, V., Yarovyi, A. (2019) Development of the model of the antagonistic agents behavior under a cyber conflict. Eastern-European Journal of Enterprise Technologies. ISSN 1729-3774, Vol. 4, number 9 (100). P. 6-19. DOI: https://doi.org/10.15587/1729-4061.2019.175978
- Yakushenko, K. V. (2014). Unified information space: theoretical approaches to the content of the concept. Belarus and world economic processes: Sat. scientific Art. Issue. 11. Minsk. P. 13-20.
- Vincent, A. V. (2011). Development of a model of a single information space to assess the reliability of its operation. Proceedings of the Kola Scientific Center of the Russian Academy of Sciences. (7). P. 65-70.
- Yalova, K., Zavgorodnii, V., Romanyukha, M., Sorokina, L. (2016). Challenges and prospects in development of e-learning system for IT students. International Journal of Continuing Engineering Education and Life Long Learning. 26(1). P. 25–43. https://doi.org/10.1504/IJCEELL.2016.075042
- Saifuddin Saif, A.F.M., Prabuwono, A. S., Mahayuddin, Z. R. (2014) Moving Object Detection Using Dynamic Motion Modelling from UAV Aerial Images. Hindawi Publishing Corporation the Scientific World Journal. 12 p. DOI: http://dx.doi.org/10.1155/2014/890619
- Yarovy, O., Zavhorodniy, V. (2021) Antenna systems of unmanned aerial vehicles for monitoring ground objects in the conditions of intentional interference. Abstracts of reports of the scientific and practical conference “Information and telecommunication systems and technologies and cyber security: new challenges, new tasks". ISZZI KPI named after Igor Sikorskyi. P. 212-213.
- Chen, J., Zongjian, L., Xiaojing, W., Yongrong, L. (2012) Application of UAV system for low altitude photogrammetry in Shanxi. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences: XXII ISPRS Congress, Melbourne, 25.08.2012-01.09.2012. Melbourne. P. 351-354.
- Zhuk, O., Dniprovska, A., Yarovy, O., Ruschak, O. (2019) Analysis of the effectiveness of using atmospheric optical transmission systems. Information Technology and Security. January-June 2019, Vol. 7, number. 1 (12). P. 99-109. Access mode: http://nbuv.gov.ua/UJRN/inftech_2019_7_1_12
