The Study of Slow Manifolds in the Lorenz-Haken Model Using Differential Geometry

Author: A.K.M. Nazimuddin, Md. Showkat Ali
Journal: International Journal of Mathematical Sciences and Computing @ijmsc
Article in issue: 4 vol.9, 2023.
Free access
In order to explore the Lorenz-Haken model, we will concentrate on the flow curvature technique, a recently created method based on differential geometry. This approach treats a dynamical system's trajectory curve or flow as a curve in Euclidean space. Analytical calculations may be used to determine the flow curvature, which is the trajectory curve's curvature. The flow curvature manifold, which is related to the dynamical system of any dimension, is defined by the locations where the flow curvature is null. For the slow invariant manifold of the same dynamical system, the flow curvature manifold offers an analytical equation. The slow invariant manifold equation may be discovered using the flow curvature technique without the need of any asymptotic expansions. In this study, we compute the analytical equation of the slow invariant manifold for the three-dimensional Lorenz-Haken model using the flow curvature approach for the first time. This analytical equation, together with its visual representation in phase space, makes it possible to distinguish between the slow development of trajectory curves and the rapid one, which advances our knowledge of this slow-fast domain. This study also advances the field relative to earlier similar work. Aside from that, we utilize the Darboux theorem to demonstrate the slow manifold's invariance characteristic.
L-H equations, Slow-Fast Model, Analytical Equation, Darboux Theory, Flow Curvature Method
Short address: https://sciup.org/15019062
IDR: 15019062 | DOI: 10.5815/ijmsc.2023.04.01
Text of the scientific article The Study of Slow Manifolds in the Lorenz-Haken Model Using Differential Geometry
The existence of invariant manifolds in singularly perturbed systems where the flow trajectories move slowly has been established in previous works [1, 2]. Different methods have been developed to find the analytical equations of these slow manifolds, such as the geometric singular perturbation technique [3, 4]. However, this technique fails to provide the slow manifold equation for non-singularly perturbed systems like the Lorenz-Haken (L-H) model.
A single mode unidirectional ring laser that contains a homogeneously-broadened, two-level medium, known as the Lorenz-Haken model, serves as the simplest laser model. Haken [5] discovered the equivalence between the Lorenz model that describes fluid turbulence [6] and the equations of a homogeneously-broadened, single-mode laser in 1975. Under suitable conditions, such a laser system becomes unstable, characterized by respective values of decay rate (bad cavity condition) and level of excitation (second laser threshold). Numerical integration of the Lorenz-Haken model indicates that the system undergoes a transition from a stable continuous wave output to a regular pulsing state. However, it can also develop irregular pulsations (chaotic solutions), whose nature Haken explained. For over thirty years, finding the pulsing solutions of the single-mode laser equations involved numerical integration. Bougoffa and Bouggouffa [7, 8, 9] proposed an analytical approach using Adomian decomposition to solve the Lorenz system.
A novel method for finding the implicit equation of the slow manifold, applicable to any dynamical system in any dimension, singularly disturbed or not, has recently been developed [10, 11]. It is called the flow curvature method. The FitzHugh-Nagumo model, the Brusselator model, the Van der Pol model, the Chua's model, the Lorenz model, and the Rikitake model have all been successfully used the flow curvature approach. The generalized Lorenz-Krishnamurthy model and conservative generalized Lorenz-Krishnamurthy model's slow invariant manifold analytical implicit equation was created in [12]. This technique was utilized in [13] to build the heartbeat model's slow invariant manifold.
Researchers have studied a variety of slow-fast dynamical models that are helpful in science and engineering [14, 15, 16].
The major research objective is to find the slow invariant manifold analytical equation of the L-H model. In order to get the analytical implicit equation of the slow invariant manifold for the three-dimensional L-H model, we employ the flow curvature approach in this study. There are numerous methods available to determine the slow manifold analytical implicit equation of the model we present. Slow eigenvectors [17], an iterative approach [18] have all been used in earlier slow manifold’s calculations for the L-H model. No dimensional constraint or asymptotic expansion is necessary for our recommended approach. First, using the flow curvature approach, we identify the slow manifold analytical implicit equation of the L-H model and then we prove the invariance of the slow manifold of the L-H model using the Darboux theory. To simulate the L-H model, we utilize the program MATHEMATICA.
The remainder of this article is divided into the following sections. Section 2 introduces the nonlinear optical slow-fast L-H model. The flow curvature approach based on differential geometry is described in Section 3, along with the Darboux theorem that proves the slow manifold of a dynamical system is invariant. We present the analytical equation of the slow manifold for the L-H model in Section 4. Concluding observations and additional commentary on the study's findings are provided in Section 5 of this report.
2. Lorenz-Haken Model
The starting point of the model is the Maxwell-Bloch equations in the single mode approximation, which describes the behavior of a unidirectional ring laser containing a homogeneously broadened medium. A semi-classical approach is used to derive the equations of motion by considering the resonant field inside the laser cavity as a macroscopic variable interacting with a two-level system. The model assumes exact resonance between the atomic line and the cavity mode and makes some appropriate approximations. After these approximations, three nonlinear differential equations are obtained, which describe the behavior of the field, polarization, and population inversion of the medium. This set of equations is commonly referred to as the L-H model. The standard L-H model's slow-fast system is as follows:
dx dt dy dt dz dt
-
- k ( x + 2 cy ) ,
(1) - y + xz ,
- d (1 + xy + z),
3. The Flow Curvature Technique3.1. The Implicit Analytical Equation of the Slow Manifold of the Dynamical System
where the electric field in the laser cavity is denoted by x(t) with a decay constant к, the polarization of this field is represented by y(t) , and the population difference is indicated by z(t) with a decay constant d . Both к and d are normalized with respect to the polarization relaxation rate, and 2C is the pump rate necessary to achieve the lasing effect. In order to obtain the steady-state solution of the system, all time derivatives are set to zero. However, under certain circumstances, the steady-state solution becomes unstable. Linear stability analysis can be used to determine the boundary regime where the equations become unstable.
In this section, we will explore the use of differential geometry in analyzing the dynamical model. The technique involves studying the curvature of the trajectory curve, which allows us to obtain the flow curvature manifold. For any n -dimensional dynamical model, there exists a (n — 1) dimensional flow curvature manifold which contains information about the flow with the maximum curvature.
Understanding the stability and behavior of a slow-fast system depends on the invariant manifold. A sluggish manifold's equation can be found using the traditional approach of geometric perturbation. It doesn't need eigenvectors or asymptotic expansions like the flow curvature approach requires. It is also applicable to all dynamical systems, singularly disturbed or not.
Lemma 3.1 The equation of the flow curvature manifold of a dynamical system represents the set of points where the curvature of the system's flow vanishes.
0 ( W ) = det W , W , W ,
, , W ( n )
= 0
Proof See [10]
Lemma 3.2 The analytical equation of the slow manifold can be obtained directly from the implicit equation of the flow curvature manifold.
Proof See [10]
3.2. Darboux Invariance Theorem
According to [19], G. Darboux originally proposed the idea of the invariant manifold in 1878. In this study, we represent the trajectories of the dynamical system (1) as the motion of a point in a three-dimensional space, where the point's coordinates are denoted as W = (x, y, z) and its velocity vector as V = (x, y, z) .
4. Using the Flow Curvature Method to Analyze Dynamic L-H Model
Lemma 3.3 Assume that ^ W ) = det ^ W , W , W ,..., W( n ) j = 0 is a continuously differentiable function of the first order that represents a slow manifold of the dynamical system (1). Then, this manifold is invariant concerning the flow of (1) if there exists a continuously differentiable function, referred to as cofactor R ( W ), which satisfies the following equation:
£y 0(W) = R (W )0(W), with the following Lie derivative:
Cy 0 ( W ) = V -V0 = d 0/ dt
Proof See [10]
The flow curvature method is a technique that considers the trajectory curves of a dynamical system, whether singularly perturbed or not, as curves in the Euclidean space. In this study, The flow curvature approach is used to the slow-fast dynamical system described by model (1).
To perform numerical simulations, we utilize the parameter values provided in Table 1, and let, a measure of the state variables' range associated with model (1) as follows:
[x min , x max ] = [-15, 15];
[ymin , ymax ] = [-15, 15];
[zmin , zmax ] = [-15, 15];
Table 1. For the numerical calculations, typical model (1) parameter values..
|
Parameters |
k |
c |
d |
|
Values |
3 |
9.2 |
0.1 |
By arranging the dynamic system's right-hand side components (1), that is,
- k ( x + 2 cy ) = 0 ,
- y + xz = 0, (2)
- d (1 + xy + z ) = 0,
For the null-clines of the model (1), we get the following graphs.
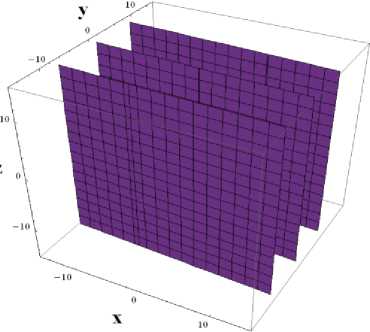
(a)
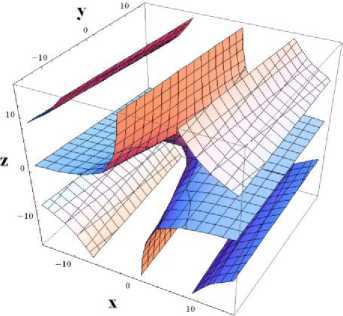
(b)
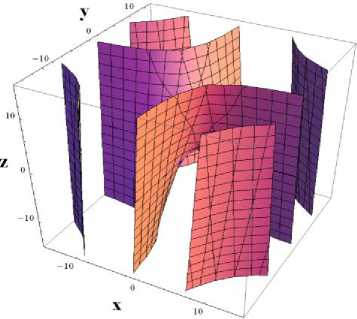
(c)
Fig. 1. (a) The Nullcline of the first equation of model (1), (b) The Nullcline of the second equation of model (1), and (c) The Nullcline of the third equation of model (1).
As a result, after solving the system of equations (2), we get the fixed points as follows:
x1 = -4.17, y1 = 0.23, z1 = -0.05
x2 = 0, y2 = 0, z2 = -1
x3 = 4.17, y3 = -0.23, z3 = -0.05
The model's Jacobian matrix at the fixed point is as follows:
' - 3 - 55.2 0 4
z - 1 x ^- 0.1 y - 0.1 x - 0.1 ^
The following formulae are used to express the eigenvalues of the aforementioned Jacobian matrix that correspond to model (1) at the fixed points:
{-4.18477, 0.0423868 - 1.57891 i, 0.0423868 + 1.57891 i}
{-9.49667, -0.1, 5.49667}
{-4.18477, 0.0423868 - 1.57891 i, 0.0423868 + 1.57891 i}
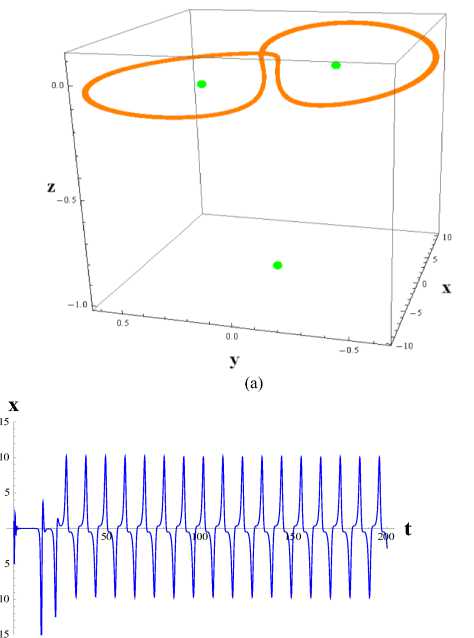
We employ the fourth order Runge-Kutta approach to resolve the flow model (1), where we consider as a starting point. The phase plot's three-dimensional graphical behavior, with a t range of 0 to 1000, is shown in Fig. 2 (a). The three-dimensional parametric plot of this, where t is a value between 50 and 1000, is computed using mathematics. The green point in Fig. 2 (a) denotes the model's fixed points.
y
(b)
t
z
(c)
(d)
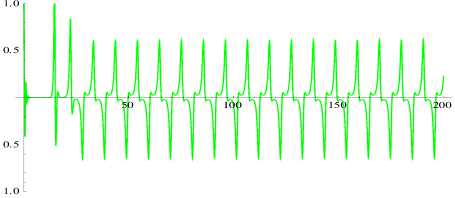
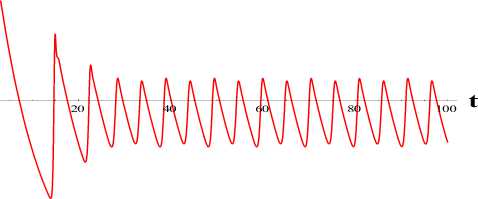
Fig. 2. (a) The Phase plane result and three fixed points; (b) The Time series solution of x; (c) The Time series solution of y; and (d) The Time series solution of z.
We create three-dimensional parameter charts using the numerical simulation of model (1), where spans from 0 to 1000. Fig. 2(b) shows the periodic solution behavior of the variables x,y, and z, whereas Fig. 2(c) shows the periodic solution behavior of the variables у and z.
We now compute the acceleration vector and velocity vector first in line with the FCM.
The following is the model (1)'s velocity vector.
V1={-3 (x + 18.4 y), -y + x z, -0.1 (1 + x y + z)}
The acceleration vector may now be expressed as follows:
-
V 2={-55.2 (-0.163043 x - 4. y + 1. x z), -0.1 (1. x - 10. y + 1. x2 y + 41. x z + 552. y z), 5.52 (0.00181159 + 0.0742754 x y + 1. y2 + 0.00181159 z - 0.0181159 x2 z)}
The over-acceleration (jerk) vector may thus be expressed as follows.
-
V 3={0. + 165.6 (-0.163043 x - 4. y + 1. x z) + 5.52 (1. x - 10. y + 1. x2 y + 41. x z + 552. y z), 0.6 (x + 18.4 y) (1 + x y + z) - 55.2 z (-0.163043 x - 4. y + 1. x z) + 5.52 x (0.00181159 + 0.0742754 x y + 1. y2 + 0.00181159 z - 0.0181159 x2 z) + 0.1 (1. x - 10. y + 1. x2 y + 41. x z + 552. y z), 0. + 0.6 (x + 18.4 y) (-y + x z) + 5.52 y (-0.163043 x - 4. y + 1. x z) -0.552 (0.00181159 + 0.0742754 x y + 1. y2 + 0.00181159 z - 0.0181159 x2 z) + 0.01 x (1. x - 10. y + 1. x2 y + 41. x z + 552. y z)}
The slow manifold function may now be stated as follows.
Θ (x, y,z) = 0.003 (-134.4 x2 + 1. x4 - 6262.8 x y - 244.8 x3 y + 2. x5 y - 93630.2 y2 - 9562.8 x2 y2 + 49.6 x4 y2
+ 1. x6 y2 - 95661.6 x y3 + 4140. x3 y3 + 2.31296*10 - 15 x5 y3 + 481432. y4 + 135085. x2 y4+ 1.68197*106 x y5 - 1247.4 x2 z + 71. x4 z - 32648.4 x y z + 3636.6 x3 y z - 9. x5 y z - 742650. y2 z + 85946.4 x2 y2 z + 1104. x4 y2 z + 125944. x y3 z + 30470.4 x3 y3 z - 1.06525*107 y4 z - 12153. x2 z2 + 496. x4 z2 + 10. x6 z2 - 229522. x y z2 + 36432. x3 y z2 + 7.40149*10 - 14 x5 y z2 - 6.25557*106 y2 z2
-
+ 1.06646*106 x2 y2 z2 + 1.68197*107 x y3 z2 - 112608. x2 z3 + 11040. x4 z3 - 203136. x y z3 + 304704. x3 y z3
-
- 5.60655*106 y2 z3 - 101568. x2 z4)
The flow curvature manifold of the model (1) now provides the slow manifold's equation.
Θ ( x , y , z ) = 0 (3)
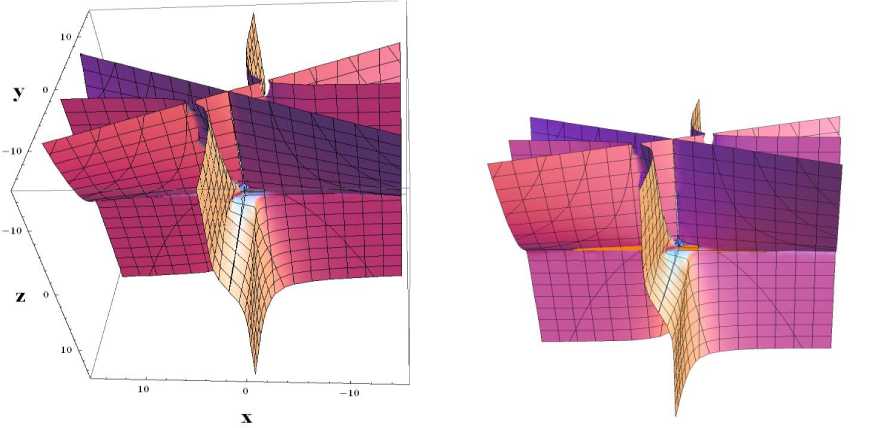
Fig. 3 (a) depicts the slow manifold of the model (1) visually. Fig.3(b) displays a visual representation of the phase diagram and slow manifold.
(a)
(b)
Fig. 3 (a) The model (1)'s flow curvature manifold; (b) the phase diagram and the flow curvature manifold together.
We begin by determining the flow curvature manifold’s perpendicular vector ∇Θ . The Darboux theory and this normal vector ∇Θ may then be used to find the Lie derivative ^v Θ . It is possible to express the normal vector ∇Θ as:
-
{0 .003 (-268.8 x + 4. x3 - 6262.8 y - 734.4 x2 y + 10. x4 y - 19125.6 x y2 + 198.4 x3 y2 + 6. x5 y2 - 95661.6 y3 + 12420. x2 y3 + 1.15648*10-14 x4 y3 + 270171. x y4 + 1.68197*106 y5 - 2494.8 x z + 284. x3 z - 32648.4 y z + 10909.8 x2 y z - 45. x4 y z + 171893. x y2 z + 4416. x3 y2 z + 125944. y3 z + 91411.2 x2 y3 z - 24306. x z2 +
-
1984. x2 z2 + 60. x5 z2 - 229522. y z2 + 109296. x2 y z2 + 3.70074*10-13 x5 y z2 + 2.13293*106 x y2 z2 + 1.68197*107 y3 z2 - 225216. x z3 + 44160. x3 z3 - 203136. y z3 + 914112. x2 y z3 - 203136. x z4), 0.003 (-6262.8 x - 244.8 x3 + 2. x5 - 187260. y - 19125.6 x2 y + 99.2 x4 y + 2. x6 y - 286985. x y2 + 12420. x3 y2 + 6.93889*10-15 x5 y2 + 1.92573*106 y3 + 540342. x2 y3 + 8.40983*106 x y4 - 32648.4 x z + 3636.6 x3 z -
-
9. x5 z - 1.4853*106 y z + 171893. x2 y z + 2208. x4 y z + 377833. x y2 z + 91411.2 x3 y2 z - 4.26098*107 y3 z -
229522. x z2 + 36432. x3 z2 + 7.40149*10-14 x5 z2 - 1.25111*107 y z2 + 2.13293*106 x2 y z2 +
-
5. 0459*107 x y2 z2 - 203136. x z3 + 304704. x3 z3 - 1.12131*107 y z3),
0.003 (-1247.4 x2 + 71. x4 - 32648.4 x y + 3636.6 x3 y - 9. x5 y - 742650. y2 + 85946.4 x2 y2 +
-
1104. x4 y2 + 125944. x y3 + 30470.4 x3 y3 - 1.06525*107 y4 - 24306. x2 z + 992. x4 z + 20. x6 z -
-
459043. x y z + 72864. x3 y z + 1.4803*10-13 x5 y z - 1.25111*107 y2 z + 2.13293*106 x2 y2 z + 3.36393*107 x y3 z - 337824. x2 z2 + 33120. x4 z2 - 609408. x y z2 + 914112. x3 y z2 - 1.68197*107 y2 z2 - 406272. x2 z3)}
-
-
Now, the sluggish manifold's Lie derivative ^vΘ may be expressed as
-2.35922*10-17 (-1.18404*1017 x2 + 2.42876*1015 x4 - 5.48746*1018 x y - 2.52831*1017 x3 y + 4.85753*1015 x5 y - 7.72159*1019 y2 - 1.42053*1019 x2 y2 + 2.18774*1017 x4 y2 + 2.42876*1015 x6 y2 -2.15076*1020 x y3 + 9.19031*1018 x3 y3 + 5.61541*1016 x5 y3 - 5.62054*1020 y4 + 2.60556*1020 x2 y4 + 3.87463*1017 x4 y4 + 3.47198*1021 x y5 + 1.18062*1022 y6 - 4.80277*1017 x2 z + 1.52987*1017 x4 z -1.65582*1019 x y z + 9.71352*1018 x3 y z - 1.84256*1016 x5 y z - 5.86575*1020 y2 z + 2.22882*1020 x2 y2 z + 1.01077*1018 x4 y2 z + 1. x6 y2 z + 1.32804*10^21 x y3 z + 3.62924*1019 x3 y3 z - 4.6697*1021 y4 z -77101.2 x2 y4 z - 9.72556*1018 x2 z2 + 7.28197*1017 x4 z2 + 2.42876*1016 x6 z2 - 1.12069*1020 x y z2 + 4.665*1019 x3 y z2 + 5.61541*1017 x5 y z2 - 3.57497*1021 y2 z2 + 1.8234*1021 x2 y2 z2 + 2597.65 x4 y2 z2 + 3.34365*1022 x y3 z2 + 1.18062*1023 y4 z2 - 6.61916*1019 x2 z3 + 1.26347*1019 x4 z3 - 9.41176 x6 z3 -1.00999*1020 x y z3+ 4.32667*10^20 x3 y z3 - 3.06561*1021 y2 z3 + 1.23362*106 x2y2 z3 - 5.68279*1019 x2 z4 -3.87463*1019 x4 z4)
5. Conclusion
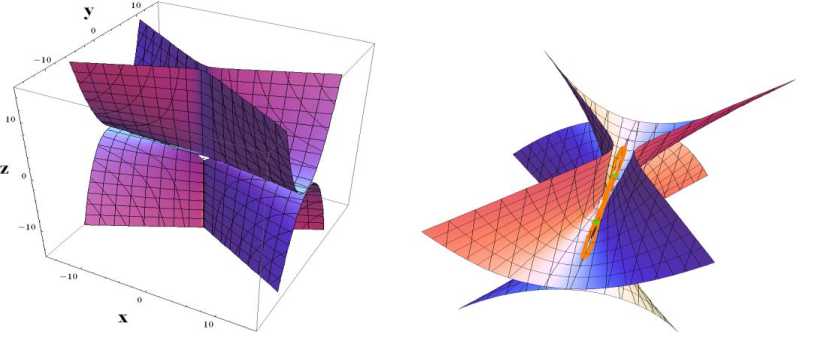
The equation £p0 = 0 , which denotes that The flow curvature manifold's rate of change 0 ( x , y ) = 0 , is graphically depicted in Figure 4(a). The phase diagram and the equation for the slow manifold's invariance are shown visually in Figure 4(b).
(a) (b)
Fig. 4. The slow manifold's invariance equation is shown in (a), and the phase diagram and slow manifold's invariance equation are shown in (b).
This work investigated the L-H model using the flow curvature approach, a recently developed technique that uses differential geometry to the analysis of dynamical systems. Analytical calculations were made to determine the flow curvature manifold, which represents the temporal derivatives of the velocity vector field and offers details on the dynamics of the system. The L-H model is a nonlinear optical slow-fast dynamical system, and in this study, the flow curvature approach was used to evaluate the L-H Model’s slow invariant manifold. With the use of the Explicit Runge-Kutta technique, the analytical equation for the slow invariant manifold was discovered. The slow manifold was shown to be invariant using the Darboux invariance theorem, which showed strong agreement with the flow curvature manifold. For the first time, we specifically investigated the slow manifold of the three-dimensional L-H model using the flow curvature approach, and this research improves the field relative to earlier relevant work.
References The Study of Slow Manifolds in the Lorenz-Haken Model Using Differential Geometry
- Levinson, N., (1949). A second-order differential equation with singular solutions, Ann. Math, 50:127–153.
- Tikhonov, A.N. (1948). On the dependence of solutions of differential equations on a small parameter, Mat. Sbornik N. S., 31:575–586.
- Fenichel, N. (1971). Persistence and smoothness of invariant manifolds for flows, Indiana Univ. Math. J, 21:193–225.
- Fenichel, N. (1974). Asymptotic stability with rate conditions, Indiana Univ. Math. J, 23:1109–1137.
- Haken, H. (1975). Analogy between higher instabilities in fluids and lasers, Phys. Lett. A, 53(1):77–78.
- Lorenz, E. N. (1963). Deterministic nonperiodic flow. Journal of atmospheric sciences, 20(2), 130-141.
- Bougoffa, L., & Bougouffa, S. (2006). Adomian method for solving some coupled systems of two equations. Applied mathematics and computation, 177(2), 553-560.
- Bougouffa, S. (2008, September). Linearization and Treatment of Lorenz Equations. In AIP Conference Proceedings (Vol. 1048, No. 1, pp. 109-112). American Institute of Physics.
- Bougoffa, L., & Bougouffa, S. (2014). New parametric approach for the general Lorenz system. Physica Scripta, 89(7), 075203.
- Ginoux, J.M. and Rossetto, B. (2006). Differential geometry and mechanics applications to chaotic dynamical systems, Int. J. Bifurc. Chaos, 4(16): 887–910.
- Ginoux, J.M., Llibre, J. and Chua, L.O. (2013). Canards from Chua’s circuit, Int. J. Bifurc. Chaos, 23(4): 1330010.
- Ginoux, J. M. (2014). The slow invariant manifold of the Lorenz–Krishnamurthy model, Qualitative theory of dynamical systems, 13(1): 19–37.
- Ginoux, J. M., & Rossetto, B. (2014). Slow invariant manifold of heartbeat model, arXiv preprint arXiv:1408.4988.
- Ping Sun (2011). Solid Launcher Dynamical Analysis and Autopilot Design, I.J. Image, Graphics and Signal Processing, 3(1) : 53-60.
- Ruisong Ye, Huiqing Huang, Xiangbo Tan (2014). A Novel Image Encryption Scheme Based on Multi-orbit Hybrid of Discrete Dynamical System, I.J. Modern Education and Computer Science, 6(10) : 29-39.
- Nikolay Karabutov (2017). Adaptive Observers with Uncertainty in Loop Tuning for Linear Time-Varying Dynamical Systems, International Journal of Intelligent Systems and Applications, 9(4) :1-13.
- Ramdani, S. (2000). Slow manifolds of some chaotic systems with applications to laser systems, Int. J of bifurcation and Chaos, 10 (12): 2729–2744.
- Rossetto, B., Lenzini, T., Ramdani, S. & Suchey, G. (1998). Slow–fast autonomous dynamical systems, Int. J. Bifurcation and Chaos, 8(11): 2135–2145.
- Llibre J . & Medrado J. C. (2007). On the invariant hyperplanes for d-dimensional polynomial vector fields , J. Phys. A. Math. Theor., 40 : 8385–8391.
