The use of static electricity and chemical-kinetic storage to power electric unmanned aerial vehicles

Author: Fadeev A.A., Shestakov I.Y., Prichina A.S.
Journal: Siberian Aerospace Journal @vestnik-sibsau-en
Section: Aviation and spacecraft engineering
Article in issue: 4 vol.26, 2025.
Free access
The rapid development of electric-powered aircraft (with electric and hybrid power plants, including unmanned ones) is determined by the following advantages: reduction of harmful effects on the environment, reduction of noise exposure, reduction of maintenance costs. However, the development of such aircraft is hindered, in addition to organizational and legal difficulties, also by technical ones, the key of which are: low power-to-weight ratio of the aircraft (compared to piston and jet aircraft), electrification, underdeveloped infrastructure of airports and airfields. One of the options for solving the problem of increasing the power and energy efficiency of an unmanned aerial vehicle (UAV) with electric traction is the installation on board of a chemical-kinetic energy storage (rotating battery packs), with the possibility of using static electrification to recharge batteries. This system allows you to implement a continuous consumption / recovery cycle during the flight. The design was developed and a simplified assessment of the energy and technical characteristics of a promising UAV based on the selection of static electricity was given. The principle of operation of the static electricity extraction system based on rotating battery packs is shown, the main advantages over traditional systems of energy storage / recovery of aircraft are given. The results of the calculation and research of a prototype (a promising unmanned aerial vehicle) are presented, showing the versatility of the design, high operational and technical characteristics, as well as recommendations for the practical application of the developed UAV design. The results obtained are the initial stage of promising work to improve unmanned aerial vehicles and electric-powered aircraft systems. The low weight and size characteristics, as well as the unusual principle of operation of the static electricity extraction system based on a rotating battery packs allows it to be used as an autonomous power source for unmanned aerial vehicles, which allows in the future to extend this principle of energy consumption for any electric-powered aircraft. This work is an important stage in the development of highly efficient power plants operating on unconventional principles of energy production, which, on the one hand, expands the field of research of storage/ recovery/ consumption systems in modern aircraft construction, on the other hand, gives a powerful impetus to the development of engineering and scientific thought in the field of unmanned aircraft construction.
Unmanned aerial vehicle, electric aircraft, rotating battery packs, static electrification
Short address: https://sciup.org/148333141
IDR: 148333141 | UDC: 629.7.064.52 | DOI: 10.31772/2712-8970-2025-26-4-562-573
Text of the scientific article The use of static electricity and chemical-kinetic storage to power electric unmanned aerial vehicles
The development of modern aviation is progressing along several key directions, the most prominent of which is the advancement of electric-propulsion aircraft systems, including:
– the development of the “all-electric aircraft” (AEA) concept [1; 2];
– the design and advancement of electric unmanned aerial vehicles (UAVs) [3; 4].
These aviation systems offer clear advantages, such as reduced environmental impact, lower noise emissions, and decreased maintenance costs.
To advance these directions, in addition to addressing organizational challenges (e.g., integrating UAVs into existing infrastructure systems [5]), it is essential to resolve the following key technical issues:
-
1. Low energy performance.
-
2. Static electricity accumulation on aircraft.
Currently, rechargeable batteries cannot compete with conventional aviation fuel in terms of energy density. The specific energy of modern lithium-ion batteries is approximately 150–200 W·h/kg, which is 60–80 times lower than that of aviation fuel.
A logical approach to addressing this issue is the development of hybrid power systems – combining two or more energy sources in various configurations [6–10]. Such systems offer significantly improved efficiency, delivering high mass-energy and reliability characteristics for UAVs. Promising research directions include the use of high-temperature superconductors (HTS) [11] and solid-state hydrogen fuel cells [12; 13], which, according to their developers, could substantially enhance the power and energy capabilities of UAVs.
Particular importance is placed on optimizing and managing UAV power system parameters through:
– the development and implementation of a structured, integrated aircraft electrical power system [14–16];
– the development and deployment of UAV power management strategies, in which power consumption, charging processes, and the state of the power source are analyzed according to a predefined algorithm [17–19].
Today, aircraft electrostatic charging represents a complex problem [20]. Its effects can disrupt or cause failures in communication and radio navigation systems, ignite fuel, and increase susceptibility to lightning strikes – even though the actual probability of lightning strike remains low, the associated psychological impact is significant [21].
During flight, friction with the air causes the aircraft to accumulate an electric charge of approximately 200–300 µC, raising its electrical potential to 200–300 kV. Over 90% of aircraft incidents related to electrostatic discharge occur at altitudes between 1,500 and 3,000 m (Fig. 1).
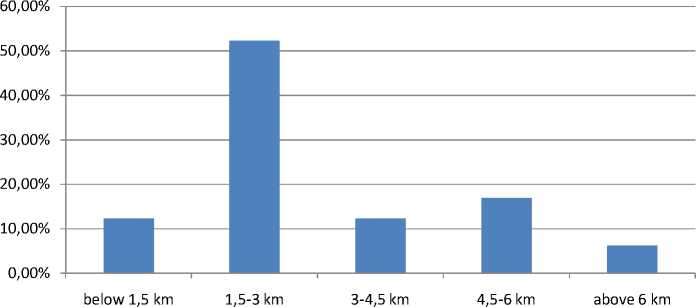
Рис. 1. Влияние высоты полёта ЛА на разряды атмосферного электричества (цифры соответствуют относительному числу случаев)
Fig. 1. The effect of the aircraft flight altitude on atmospheric electricity discharges (the numbers correspond to the relative number of cases)
The electric charge accumulated by an aircraft during flight depends on the following factors:
-
1) Meteorological conditions, including clear or overcast weather, the presence, type, phase state, and shape of clouds and precipitation, as well as the distribution of electric charges within them [22]. These conditions give rise to several physical mechanisms of aircraft electrification:
– Capture of electrically charged cloud and precipitation particles;
– The “balloon effect”;
– Triboelectric effects, arising from differences in the dielectric permittivity of contacting surfaces;
– Contact potential difference between the aircraft surface material and cloud or precipitation particles.
-
2) Aircraft characteristics (airframe design and dimensions, engine type, coating material type and properties, and parameters of static discharge wicks);
-
3) Flight regime (airspeed and altitude).
The aircraft electrification process is multidirectional: the net electric charge depends on the balance between charging currents and discharging currents. Studies [22] have shown that the accumulated electrostatic charge can reach up to 10–³ C, with stored energy levels as high as 104 J.
Methods for reducing electric charge accumulation on aircraft involve both passive and active compensation approaches. Passive methods include the use of static wicks and discharge devices [20], while active methods employ an additional high-voltage power source to neutralize surface charge [23], enabling effective charge control – potentially reducing the surface charge to nearly zero.
Another approach focuses on material selection for aircraft coatings. For instance, the authors of [24] proposed dissipating electrostatic charge by integrating multilayer composite structures into critical aircraft components, such as fuel tanks.
However, such systems have certain drawbacks, including increased aircraft weight and greater manufacturing complexity.
Prospective Power Supply System for UAVs
The authors of development [25] propose an alternative approach to mitigating electrostatic charge on aircraft – utilizing the energy of the accumulated static charge to power onboard systems. A promising solution involves employing the proposed design of a chemical-kinetic energy storage unit (CKESU) to supply power to the propulsion and other systems of an all-electric unmanned aerial vehicle (AE-UAV) (Fig. 2).
The chemical-kinetic energy storage unit comprises rechargeable batteries mounted within a rotating housing.
The electric charge accumulating on the aircraft’s surface is collected via a current collector and fed into a DC-DC voltage converter, which then charges an ionistor (an electrochemical capacitor). The choice of an ionistor is deliberate, as these capacitive energy storage devices offer minimal charge and discharge time (Table 1).
To enhance the energy and operational performance of the batteries used in the chemical-kinetic energy storage unit (CKESU), it is feasible to incorporate advanced battery technologies, such as laminated lithium-ion cells (with a specific energy of 230–268 W·h/kg, capable of over 1000 cycles at 100 % depth of discharge with currents in the 0–2C range.) [27], as well as promising lithium-sulfur (specific energy of 250–350 W·h/kg) and lithium–air (specific energy of 400–500 W·h/kg) battery systems [28].
To define the technical specifications of the prospective UAV, a conventional aerodynamic configuration was selected – featuring a straight wing and a V-tail empennage (for example, following the layout of the Orion UAV developed by JSC “Kronshtadt”, Fig. 3) [29], with the internal combustion engine replaced by an electric motor powered by the CKESU. The main technical characteristics of this prospective UAV equipped with the CKESU are presented in Table 2.
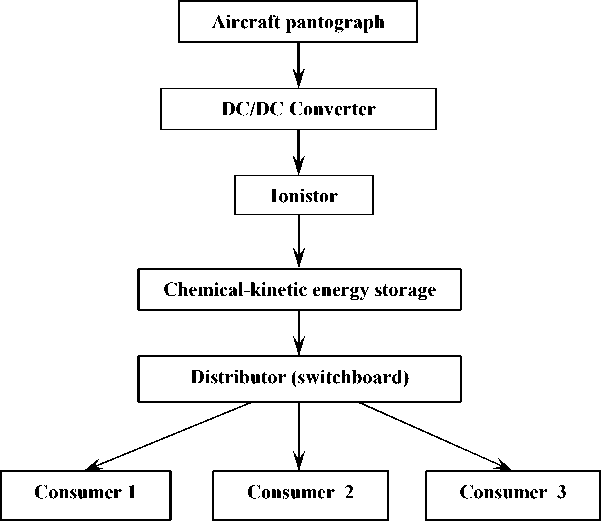
Рис. 2. Схема реализации отбора статического электричества от поверхности самолета
Fig. 2. Diagram of the implementation of the selection of static electricity from the surface of the aircraft
Energy Storage Device Parameters [26]
Table 1
|
Storage type |
Specific Energy (W·h/kg) |
Energy Discharge Time (s) |
|
Chemical |
36–360 |
1–105 |
|
Inductive |
0.36–3.6 |
103–10 |
|
Capacitive |
0.036–0.18 |
10-6–10-2 |
|
Mechanical |
3.6–360 |
1–103 |
|
Electromechanical |
0.36–3,6 |
10-2–10 |
|
Electrodynamic |
0.018–0.36 |
10-3–10-2 |
Рис. 3. Беспилотный летательный аппарат «Орион» [29]
Fig. 3. Unmanned aerial vehicle “Orion” [29]
Calculations [30] indicate that using the CKESU alone increases the UAV’s energy capacity by 20–25 %, which, in turn, reduces its specific energy consumption by 12–14% (Table 2), as demonstrated by a comparison between the proposed UAV and currently produced models.
Comparison of Technical Characteristics of Electric UAVs
Table 2
|
Characteristics |
Unit |
Prospective UAV with CKESU |
ARCA AirStrato Pioneer [32] |
ARCA AirStrato Explorer [32] |
AR5 UAV [33] |
OPV UAV [34] |
|
Manufacturer / Country |
Russia |
ARCA (USA, Romania) |
ARCA (USA, Romania) |
TEKEVER LTD (Portugal) |
Uconsystem Co., Ltd. (South Korea) |
|
|
Take-off weight |
kg |
260 |
170 |
230 |
180 |
600 |
|
Payload |
kg |
80 |
30 |
45 |
50 |
60 |
|
Engine type |
electric |
electric |
electric |
dual electric |
electric |
|
|
Engine power |
kW |
5.00 |
5.56* |
8.50* |
5.00* |
5.00* |
|
Maximum speed |
km/h |
200 |
120 |
171 |
160 |
222 |
|
Cruise speed |
km/h |
– |
100 |
153 |
100 |
185 |
|
Range |
km |
100 |
500 |
837 |
140 |
500 |
|
Ceiling (maximum) |
m |
5000 |
8000 |
18000 |
5000 |
– |
|
Wingspan |
m |
9 |
12 |
16 |
7.3 |
8.6 |
|
Length |
m |
4 |
7 |
7 |
4 |
6.6 |
|
Tail type |
V-tail |
M-tail |
M-tail |
H-tail |
Central |
|
|
Landing gear type |
tricycle |
tricycle |
tricycle |
tricycle |
tricycle |
|
|
Endurance |
hours |
6.24* |
12 |
20 |
20 |
24 |
|
kg·km |
8000 |
15000 |
37665 |
7000 |
30000 |
|
|
Specific energy consumption* |
W·h/(kg·km) |
3.90 |
4.44 |
4.51 |
14.29 |
4.00 |
* Calculated values.
For calculating the accumulated static electricity on this UAV, the methodologies presented in [22; 31] were used.
The stored electrostatic energy on the aircraft is calculated using the formula
A = Q-
Е 2C , where Q is the aircraft’s electric charge (varying in the range of 3,3×10–4 – 0,2×10–3) C), C is the aircraft’s electrical capacitance (determined by wingspan), F.
The aircraft’s capacitance (at subsonic speeds, to a first approximation) can be taken as 0.2–0.4 times the wingspan in centimeters and is calculated using the formula, F:
С = (0,2...0,4)*L *1,1126*10-12, where L is the aircraft wingspan, cm.
At the maximum possible accumulated electrostatic charge (10–3 C), the stored energy, calculated using the standard formula, equals (1,3×103J). According to research findings, the charge accumulation time on the aircraft surface – depending on flight altitude, weather conditions, and other factors – ranges from hundredths of a second to tens of seconds [22].
The average charge accumulation time (at maximum altitude) is assumed to be 1 s; thus, approximately 1.3×10³ J of electrical energy will be transferred from the current collector, through the DC–DC voltage converter, to the ionistor. This energy can subsequently be used, when needed, to recharge the CKESU.
Table 3 presents a comparison of endurance characteristics for the prospective UAV with CKESU – without and with the utilization of static electricity.
Table 3
Comparison of Technical Characteristics of the UAV with CKESU
Without and With Utilization of Static Electricity
|
Characteristics |
Unit |
Prospective UAV with CKESU without static electricity |
Prospective UAV with CKESU with static electricity |
|
|
Q = 3.3×10–4 C |
Q = 10–3 C |
|||
|
Engine power |
kW |
5.00 |
5.00 |
5.00 |
|
Range |
km |
100 |
100 |
100 |
|
Specific energy consumption* |
W·h/(kg·km) |
3.90 |
3.90 |
3.90 |
|
Specific energy |
kJ/(kg·km) |
14.04 |
14.04 |
14.04 |
|
Onboard battery energy capacity |
kJ |
112320 |
112320 |
112320 |
|
Energy from static electricity |
kJ |
– |
3196.58 |
29353.40 |
|
Endurance |
hours |
6.24 |
6.42 |
7.87 |
|
kg·km |
8000 |
8228 |
10091 |
|
|
Additional power |
kW |
– |
0.14 |
1.04 |
* Calculated values.
Utilization of static electricity enhances the UAV’s energy capabilities, providing additional power of up to 1 kW, depending on flight conditions such as altitude, airspeed, and weather. As a result, the UAV’s endurance can increase by up to 26 %.
Conclusion
The analysis presented demonstrates that, despite their advantages (such as reduced environmental impact, lower noise levels, and decreased maintenance costs) the development of modern electricpropulsion aircraft systems is constrained by key technical challenges: limited energy performance and aircraft electrostatic charging.
Implementing a battery recharging system that harnesses static electricity via a chemical-kinetic energy storage unit (CKESU) in the design of the proposed UAV enables an improvement in energy efficiency of at least 12–14 % and increases flight endurance by up to 26 %.
The compact size and weight, combined with the novel operating principle of the static charge harvesting system based on the CKESU, make it suitable as a self-contained power source for unmanned aerial vehicles. This approach holds promise for broader application in the future across all types of electrically powered aircraft.
