Тяговый электропривод активного прицепа трубовоза

Автор: Усынин Юрий Семнович, Шишков Александр Николаевич, Горожанкин Алексей Николаевич, Белоусов Евгений Викторович, Журавлев Артем Михайлович, Бычков Антон Евгеньевич, Сычев Дмитрий Александрович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 1 т.13, 2013 года.
Бесплатный доступ
В статье рассматривается электропривод активного прицепа, который является составной частью трубовоза для перевозки труб большого диаметра, необходимых при прокладке нефте- и газопроводов в условиях бездорожья. Благодаря электроприводу резко увеличивается проходимость трубовоза по болотистой местности и облегчается его управление. Указанные привлекательные качества проявляются, если колеса прицепа выполнить приводными, а кинематическую схему привода одноступенчатой. При этом обращается внимание на то, что мощность электропривода будет составлять 20-25 % от номинальной мощности основного тягача, с расширенным диапазоном регулирования по скорости. Для решения поставленной задачи были положены методы, разработанные профессором Филатовым для электроприводов моталок станов холодного проката. Метод предполагает двухдиапазонное регулирование момента. Но такой подход требует применения электрических машин с большим коэффициентом перегрузки по моменту (до 10 крат от номинального момента). Такие перегрузки обеспечивает электропривод с синхронной реактивной машиной независимого возбуждения. В статье предлагаются методики, позволяющие выбрать рациональные соотношения величин поддиапазонов регулирования момента.
Активный прицеп, электропривод с синхронной реактивной машиной независимого возбуждения, двухзонное регулирование электромагнитного момента, плотность распределения тягового усилия
Короткий адрес: https://sciup.org/147158213
IDR: 147158213 | УДК: 62-83::621.313.3
Traction drive active pipe carrier trailer
The article describes the electric drives of the active trailer, which is part of the pipe carrier for the transport of large diameter pipes, required for laying oil and gas pipelines in rough terrain. With the help of electric drives the throughput of pipe carriers on marshland significantly increases and it is easier to control them. The above advantages appear if the trailer we use driving wheels, and a single-stage kinematic scheme of the drive. At the same time highlights the fact that the capacity of the electric drive will be 20-25 % of the rated power of the main truck, with an extended range of the speed control. The solving of this problem is based on the method developed by Professor Filatov for electric drives of the cold rolling mill winders. The method involves a dualband torque control. But this approach requires the use of electric drives with high torque overload (up to 10 times of the rated torque). The field regulated reluctance machine provides such overloads. Finally, the paper suggests techniques to choose the rational ratio of the quantities of the torque control subbands.
Текст научной статьи Тяговый электропривод активного прицепа трубовоза
Введение. На территории Аляски, Северной Канады, Сибири и Якутии находятся большие месторождения нефти и газа. Эти местности отличаются суровым климатом и полным бездорожьем. В этих условиях прокладка нефте- и газопроводов сопряжена с большими трудностями и требует высокой проходимости транспортных средств. В большинстве современных грузовых автомобильных поездов повышенной проходимости прицеп или выполняется без привода колеса или передача вращающего момента на колеса осуществляется механическим путем. Это снижает проходимость автопоезда, затрудняет управление, повышает опасность на дорогах и увеличивает число поломок. В том случае, когда для прицепа используется электропривод колес, можно в зависимости от длины перевозимых труб легко регулировать расстояния между осями колесных пар автомобиля и прицепа, перераспределять потоки первичной мощности теплового двигателя между колесами основного моста автомобиля и прицепа в зависимости от состояния грунта и преодолеваемых препятствий. В этом случае также облегчается управление автопоездом, что повышает безопасность и улучшает условия труда водителя.
Так как прицепы трубовоза не имеют жесткой механической связи с основной платформой автомобильного тягача, то применение на нем привычной многоступенчатой коробки передач становится не только затруднительным, но часто даже невозможным. Затрудняется также управление всем комплексом «тягач–прицеп» в режиме заднего хода, а также при маневрировании.
Сказанное требует максимального упрощения кинематической цепи привода прицепа и приводит к необходимости обсуждения одноступенчатой передачи от электродвигателя к ведущим колесам прицепа.
Однако в этом случае все трудности реализации требуемой тяговой механической характеристики активного прицепа ложатся на регулируемый электропривод колес. Здесь следует обратить внимание на следующие его особенности.
Во-первых, электропривод прицепа должен иметь ограниченную мощность, которая, на наш взгляд, не должна превышать 20–25 % от номинальной мощности основного двигателя тягача (т. е. дизеля или газовой турбины). Это позволяет сохранить достаточно благоприятные массогабаритные показатели исходного тягового привода трубовоза.
Во-вторых, отказ от сложной многоступенчатой коробки передач приводит к необходимости иметь тяговый электропривод прицепа с весьма широким диапазоном регулирования электромагнитного момента в режиме постоянства мощности. Авторы останавливаются на показателе 1:10. Это позволяет трубовозу при преодолении препятствий, а также на крутых подъёмах пусть с пониженной скоростью, но сохранять необходимые и весьма увеличенные тяговые усилия, а также повышенную управляемость. Следует также помнить и о необходимости устойчивого движения задним ходом. При движении трубовоза на ровных участках дорог с твердым покрытием от электропривода прицепа больших тяговых усилий не требуется. Некоторые авторы даже рекомендуют отключать электропривод прицепа в этом режиме.
Подобная задача получения регулируемого момента в очень широком диапазоне при постоян-
Электромеханические системы стве мощности встречается, например, в электроприводах моталок станов холодной прокатки. Там решение задачи достигается регулированием магнитного потока двигателя при постоянстве скорости намотки. Действительно, механическая мощность, требуемая для намотки полосы с постоянным натяжением F при постоянной линейной скорости V:
Рм = F •V = const.
С другой стороны, в регулируемом электроприводе поддерживается (при V= const) постоянство электромагнитной мощности
Pel =Ed^Ia= const за счет поддержания ЭДС двигателя Ed=const воздействием на его магнитный поток и тока якоря Ia=const воздействием на напряжение на якоре двигателя. В этом случае магнитный поток двигателя регулируется пропорционально диаметру наматываемого рулона, а ток якоря оказывается пропорциональным натяжению полосы.
Однако в тех случаях, когда диапазон изменения момента в режиме ограничения по мощности оказывается очень большим, по крайней мере, отношение максимального T max к минимальному T min моменту T max/ T min > (4…5), то приходится применять двухдиапазонное регулирование момента, которое в металлургических электроприводах России впервые применили А.Е. Тикоцкий и А.С. Филатов [1].
Суть данного способа заключается в следующем. Поскольку режим P e =const при чрезмерно больших диапазонах изменения отношения T max / T min воздействием только на магнитный поток при E d =const не удается, то весь диапазон регулируемого изменения момента T max / T min разделяется на два поддиапазона: на первом участке режим Pel =const достигается изменением магнитного потока двигателя при Ed =const и Ia =const, на втором – магнитный поток двигателя оставляют постоянным (Ф = const), но ток якоря Ia увеличивают, а ЭДС E d снижают, но так, чтобы поддерживалось
Pel =Ed^Ia = const.
Упомянутое регулирование момента в режиме ограничения мощности не даётся даром: при работе в первом поддиапазоне увеличивается габаритная мощность двигателя пропорционально степени ослабления магнитного потока, а при работе во втором – увеличивается перегрузка по току. Однако весьма значительные величины T max/ T min « 10 и более, которые требуются в тяговом электроприводе активного прицепа, приводят к значениям коэффициента перегрузки, которые могут обеспечить не все типы двигателей: коэффициент перегрузки в двигателях постоянного тока ограничен условиями коммутации тока на коллекторе, в асинхронных – насыщением магнитной системы. Требуемую перегрузку можно получить лишь в синхронных реактивных машинах с независимым возбуждением (СРМНВ) [2–4].
Идея работы электропривода с синхронной реактивной машиной независимого возбуждения следующая [5–11]. В явнополюсной синхронной машине роль обмотки возбуждения может выполнить и обмотка, размещенная в пазах статора, если, во-первых, ее витки находятся напротив межполюсного промежутка ротора и, во-вторых, эта обмотка имеет полный шаг. Так, если по обмоткам, находящимся над межполюсным промежутком, пропустить ток, то он создаст поток по продольной магнитной оси машины. Если теперь по обмоткам, расположенным над полюсами ротора, пропустить ток, то создается электромагнитный момент.
Токи в обмотках возбуждения, расположенных над межполюсными промежутками ротора, и токи в якорных обмотках, расположенных над полюсами ротора, могут регулироваться независимо и переключаться в функции положения ротора. По этим обмоткам нет необходимости пропускать синусоидальный ток. Более эффективной оказывается прямоугольная форма тока, как в секциях обмотки двигателя постоянного тока [12–14]. Двигатель работает как многофазный, ток и ЭДС каждой фазы сдвинуты относительно друг друга на п/ m электрических градусов, где m - число фаз двигателя.
Электропривод содержит генератор, управляемый выпрямитель, автономные инверторы и двигатели мотор-колёс по левому и правому борту прицепа. Возможна также традиционная схема привода ведущих колес прицепа через механический дифференциал от одного электродвигателя. Важной особенностью предлагаемого электропривода является применение в качестве генератора и тяговых двигателей синхронных реактивных машин независимого возбуждения. Эти электрические машины имеют следующие преимущества: простая полностью бесконтактная конструкция электрических машин, высокая или очень высокая механическая жёсткость ротора, что повышает надёжность при высоких скоростях и перегрузках. На роторе нет обмоток, используется высокая технологичность изготовления электрических машин (по экспертным оценкам, его цена ниже, чем асинхронного короткозамкнутого двигателя на 15– 20 %), повышенный КПД из-за «холодного» ротора, высокие перегрузки по моменту (до 4–6 М Н ), обмотка двигателя и генератора выполнена как однослойная с полным шагом, по форме тока и напряжению наилучшим образом сопрягается с полупроводниковыми преобразователями [15–19]. Полупроводниковый преобразователь работает в режиме пространственной векторной модуляции и в нем реализованы технические решения [20–22]. Система управления электроприводом может быть реализована на элементной базе [23–26].
В тех случаях, когда тяговый электропривод активного прицепа должен обеспечить сверхвысокий диапазон регулирования момента (до 10:1 и более), встает вопрос о рациональном соотношении величин поддиапазонов регулирования момента. Дело в том, что однозонное регулирование, хотя и более простое, оказывается оправданным в диапазоне не более (3…4):1, а далее приводит к неоправданному завышению габаритной мощности тягового электропривода. Наличие второй зоны оправдано также потому, что очень большие перегрузки по моменту весьма кратковременны. Об этом также свидетельствует типовая зависимость плотности распределения тягового усилия, график которой близок к кривой Гаусса.
С учетом сказанного можно предложить следующую последовательность расчета тягового электропривода активного прицепа. При заданных в технических условиях величинах предельной мощности электропривода, минимального и максимального моментов строится предельная характеристика.
На рис. 1 приведена серия кривых (в относительных единицах), которая поясняет общий ход расчетов тягового электропривода с двумя поддиапазонами регулирования момента. В качестве исходных данных принимается механическая характеристика электропривода в режиме постоянной мощности Pel = const и с заданной кратностью изменения момента, которая характеризуется значениями момента в точке А , где TА = T MIN =1и точке В , где T А = T MAX (см. рис. 1, а). В примере взято T А /T В = 1:10.
График плотности распределения pi тягового усилия совмещается по оси момента с механической характеристикой (рис. 1, б).
Кривые, поясняющие характер изменения в функции момента переменных состояния электропривода при Pel = const: магнитного потока Ф = f (М), ЭДС двигателя Ed = f (T), тока якоря I a = f (T), – приведены на рис. 1, в. Граница между первой зоной регулирования момента, где постоянство мощности достигается изменением магнитного потока при Ed = const и I a =const , и второй зоной регулирования момента, где ток якоря увеличивается, ЭДС двигателя уменьшается, а магнитный поток Ф = const, соответствует моменту в точке N на кривой (рис. 1, а). Положение этой точки необходимо выбрать так, чтобы суммарное увеличение габаритной мощности электропривода было минимальным.
При работе электропривода в первой зоне габаритная мощность электропривода тем больше, чем больше диапазон регулирования магнитным потоком и пропорциональна отношению моментов в точках A и N :
„ Tn „ Povi = Рд • ^ = Tn-
Здесь принято TА = 1, nА = 1 и тогда РА = 1 – мощность, развиваемая электроприводом в точке А механической характеристики (см. рис. 1, а).
При работе электропривода во второй зоне габаритная мощность вообще бы не увеличива- лась, если бы электродвигатель имел значительный запас по нагреву и очень большую перегрузочную способность. Но поскольку это не так, то приходится завышать номинальную мощность двигателя, чтобы он при работе электропривода в первой зоне (пусть даже на предельной тяговой характеристике, где Pel = const) имел некоторый запас по нагреву, который бы затем полностью расходовался при работе во второй зоне. При этом следует ориентироваться на величину среднеквадратичного тока за полный рабочий цикл. Как показано в [3], в зоне больших нагрузок FRRM имеет пропорциональную зависимость между током и моментом. В этом случае можно проводить проверку выбранного двигателя, ориентируясь на величину среднеквадратичного момента.
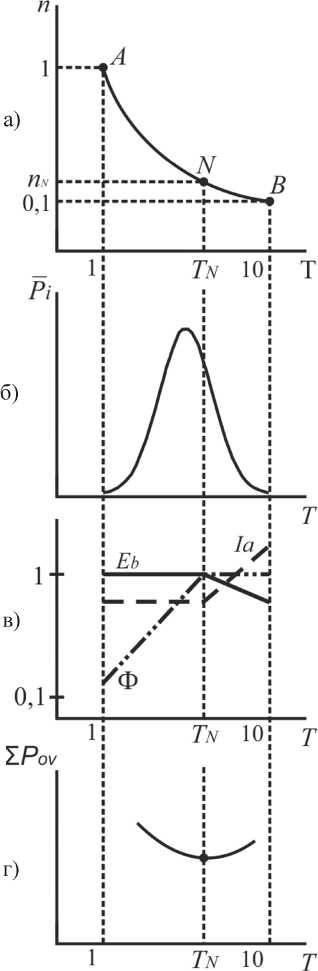
Рис. 1. Общий ход расчета тягового электропривода с двумя поддиапазонами регулирования момента
Так как дополнительный нагрев электродвигателя, вызванный превышением тока двигателя при работе во второй зоне, распределяется на все время рабочего цикла, то увеличение габаритной мощности не столь значительно, как отношение TА/TВ . Для ряда фиксированных значений момента в точке N строят график функции POV = f ( TN ), и выбирают ее минимальное значение (см. рис. 1, г).
Целесообразность двухзонного способа регулирования момента иллюстрирует следующий пример. В электроприводе активного прицепа, где номинальная мощность тягового электродвигателя P N = 40 кВт, диапазон электрического регулирования момента d = TВ/TА = 10, были получены следующие результаты: первый поддиапазон регулирования момента изменением магнитного потока двигателя d 1 = TN / T А = 4, второй – только увеличением тока двигателя I a и снижением ЭДС двигателя E d – d 2 = T В/ TN = 2,5, габаритная мощность тягового электродвигателя (в долях от механической мощности, расходуемой на тягу) P OV ≈ 6. При этом, если бы регулирование момента осуществлялось только воздействием на магнитный поток двигателя, то P OV ≈ 10. Столь значительная разница в величинах габаритной мощности двигателя при рассмотренных способах регулирования момента достигается благодаря, во-первых, принятому двухдиапазонному способу регулирования момента, а, во-вторых, из-за относительно благоприятной формы кривой плотности распределения силы тяги на транспортных средствах (см. рис. 1, б), когда очень большие перегрузки наблюдаются сравнительно непродолжительное время.
Предложенные методы расчета могут успешно применяться для технологических объектов [27, 28], в которых решаются задачи энергосбережения.
Список литературы Тяговый электропривод активного прицепа трубовоза
- Филатов, А.С. Электропривод и автоматизация реверсивных станов холодной прокатки/А.С. Филатов. -М.: Металлургия, 1973.
- Lipo, Т. Advanced Motor Tecnologics: Converter Fed Machines//IEEE Trans. -1997. -No. 7. -P. 204-222.
- Law, J.D. Design and Performance of Field Regulated Reluctance Machine/J.D. Law, A. Chertok, T.A. Lipo//IEEE Trans. on Industry Applications. -1994. -№ 5. -P. 1185-1193.
- Усынин, Ю.С. Электроприводы и генераторы с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов//Электричество. -2007. -№ 3. -С. 21-26.
- Параметрическая оптимизация частотнорегулируемых электроприводов/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков и др.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 18. -№37(296). -С. 30-33.
- Электропривод с синхронным реактивным двигателем независимого возбуждения/Ю.С. Усынин, Н.Д. Монюшко, Г.В. Караваев, М.А. Григорьев//Вестник ЮУрГУ. Серия «Энергетика». -2001. -Вып. 1. -№4(4) -С. 70-76.
- Пат. 2240640 Российская Федерация, МПК H 02 G 1/02. Синхронный реактивный генератор автономной энергетической установки и способ управления им/Ю.С. Усынин, С.М. Бутаков, М.А. Григорьев, К.М. Виноградов. -№ 2003118611/09; заявл. 20.06.03; опубл. 20.11.04, Бюл. №32.
- Пат. 2346376 Российская Федерация, МПК H 02 K 19/24. Синхронная реактивная машина/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов, А.Н. Горожанкин, С.А. Чупин. -№ 2007126685 заявл. 12.07.2007; опубл. 10.02.2009, Бюл. № 4.
- Удельные показатели электропривода с синхронным реактивным двигателем независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов, А.Н. Горожанкин//Вестник ЮУрГУ. Серия «Энергетика». -2008. -Вып. 9. -№ 11(111). -С. 52-53.
- Григорьев, М.А. Предельные возможности электроприводов с синхронной реактивной машиной независимого возбуждения/М.А. Григорьев//Вестник ЮУрГУ. Серия «Энергетика». -2009. -Вып. 12. -№ 34(167). -С. 51-55.
- Пат. 2422972 Российская Федерация. Синхронная реактивная машина/Ю.С. Усынин, М.А. Григорьев, К.М. Виноградов, А.Н. Горожанкин, А.Н. Шишков, А.Е. Бычков, А.В. Валов. -Заявл. 17.12.2009.
- The Losses in Control Electric Drives of Transport Mechanisms at Different Controlled Laws/Yu.S. Usinin, M.A. Grigorjev, A.N. Shishkov, A. Bychkov, S.P. Gladyshev//SAE Paper 2011-01-0039, SAE 2011 World Congress, Detroit, MI, April 12-14, 2011. -6 p.
- Потери в регулируемых электроприводах при разных законах управления/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков и др.//Вестник ЮУрГУ. Серия «Энергетика». -2010. -Вып. 13. -№ 14(190). -С. 47-51.
- Вентильный электропривод с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков//Электротехника. -2013. -№ 3. -С. 37-43.
- Развитие частотных методов синтеза электроприводов с синхронными электрическими машинами/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков, А.Е. Бычков, Е.В. Белоусов//Вестник ЮУрГУ. Серия «Энергетика». -2011. -Вып. 16. -№34(251). -C. 21-27.
- Частотные характеристики канала регулирования момента в синхронных электроприводах/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков//Электричество. -2012. -№ 4. -С. 54-59.
- Электроприводы с синхронной реактивной машиной независимого возбуждения для станов холодной прокатки труб/Ю.С. Усынин, С.П. Лохов, М.А. Григорьев, Е.В. Белоусов.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 17. -№16(275). -C. 107-110.
- Синтез системы управления электроприводом с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков и др.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 18. -№ 37(296). -C. 38-41.
- Григорьев, М.А. Линейная плотность поверхностного тока в энергосберегающих электроприводах с синхронной реактивной машиной независимого возбуждения/М.А. Григорьев, А.Е. Бычков//Вестник ЮУрГУ. Серия «Энергетика». -2010. -Вып. 14. -№ 32(208). -C. 46-51.
- Дудкин, М.М. Однофазные обратимые преобразователи напряжения для улучшения качества электрической энергии в сетях ограниченной мощности/М.М. Дудкин//Практическая силовая электроника. -2012. -№ 2 (46). -C. 19-27.
- Реверсивный тиристорный преобразователь для систем управления с питанием от сети с нестационарными параметрами/Л.И. Цытович, Р.М. Рахматулин, М.М. Дудкин, А.В. Качалов//Практическая силовая электроника. -2009. -№ 2 (34). -С. 35-41.
- Дудкин, М.М. Динамические спектральные характеристики развертывающих преобразователей с широтно-импульсной модуляцией/М.М. Дудкин, Л.И. Цытович, О.Г. Брылина//Практическая силовая электроника. -2012. -№ 4 (48). -С. 49-55.
- Интегрирующие развертывающие преобразователи с повышенной температурной стабильностью характеристик/Л.И. Цытович, М.М. Дудкин, А.В. Качалов и др.//Приборы и системы. Управление, контроль, диагностика. -2010. -№ 10. -С. 38-43.
- Система регулирования температуры и непрерывного контроля сопротивления изоляции электротехнических изделий в процессе их термической обработки/Л.И. Цытович, Р.М. Рахматулин, О.Г. Брылина и др.//Приборы и системы. Управление, контроль, диагностика. -2012. -№ 8. -С. 45-50.
- Адаптивная интервало-кодовая двоично-десятичная интегрирующая синхронизация систем управления силовыми вентильными преобразователями/Л.И. Цытович, О.Г. Брылина, М.М. Дудкин, Р.М. Рахматулин//Электротехника. -2013. -№ 3. -С. 8-15.
- О новом принципе интегрирующего аналого-цифрового преобразования с бестактовым поразрядным уравновешиванием/С.П. Лохов, Л.И. Цытович, М.М. Дудкин и др.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 18. -№ 37 (296). -С. 97-106.
- Пат. 2408973 Российская Федерация, МПК H02P027/05. Асинхронный электропривод с фазным ротором/Ю.С. Усынин, А.В. Валов, Т.А. Козина, М.А. Григорьев, К.М. Виноградов, А.Н. Горожанкин, А.Н. Шишков, А.Е. Бычков. -№ 2009148035/07; 23.12.2009.
- Энергосбережение в электроприводах тягодутьевых механизмов многосвязных объектов/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков и др.//Вестник ЮУрГУ. Серия «Энергетика». -2011. -Вып. 15. -№ 15(232). -C. 40-45.
