Точностные и вероятностные характеристики алгоритма распознавания режима полета вертолета в радиолокационной системе воздушного базирования

Автор: Богданов А.В., Горбунов C.А., Кучин А.А., Шпортко С.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 3 т.11, 2018 года.
Бесплатный доступ
В статье на основе теории многомерной линейной калмановской фильтрации разработан алгоритм распознавания в радиолокационной системе воздушного базирования режима полета вертолета для последующего выбора метода самонаведения носителя на него. Получены точностные и вероятностные характеристики алгоритма.
Распознавание, фильтр калмана, режим полета вертолета, радиолокационная система воздушного базирования
Короткий адрес: https://sciup.org/146279365
IDR: 146279365 | УДК: 629.7.058.53 | DOI: 10.17516/1999-494X-0048
Accuracy and probabilistic characteristics of the helicopter flight mode recognition algorithm in an airborne radar system
In the article, based on the theory of multidimensional linear Kalman filtering, developed the algorithm for recognizing the flight mode of a helicopter in the airborne radar system for the subsequent choice of the method of homing a carrier for it. Accuracy and probabilistic characteristics of the algorithm are obtained.
Текст научной статьи Точностные и вероятностные характеристики алгоритма распознавания режима полета вертолета в радиолокационной системе воздушного базирования
Современные и перспективные вертолеты являются опасными низкоскоростными, маловысотными и высокоманевренными воздушными целями, успешно противостоящими наземным средствам ПВО. Одним из вариантов активного противодействия воздушной цели класса «вертолет» может быть обнаружение его и последующее поражение с борта перспективного авиационного комплекса с помощью управляемой ракеты класса «воздух – воздух» с активной радиолокационной головкой самонаведения.
Для наведения на вертолет необходимо применять метод самонаведения ракеты, соответствующий режиму его полета. Так, метод пропорционального наведения применим при стационарном режиме полета вертолета, метод пропорционального наведения с положительным или отрицательным смещением – при полете вертолета с ускорением или торможением, метод погони с дополнительным углом упреждения – при полете вертолета в режиме «висение».
Очевидно, что выбор того или иного метода самонаведения должен осуществляться на основе распознавания режима полета вертолета в радиолокационной системе воздушного базирования. При этом установлено, что информативным параметром отраженного от вертолета радиолокационного сигнала является изменение во времени его доплеровской частоты, обусловленной скоростью сближения ракеты с вертолетом. В настоящее время режим такого распознавания режима полета вертолета в радиолокационной системе воздушного базирования в интересах последующего выбора, соответствующего метода самонаведения ракеты отсутствует.
Цель работы – разработка алгоритма распознавания режима полета вертолета в радиолокационной системе воздушного базирования, который обеспечивал бы выбор соответствующего метода самонаведения ракеты на него и получение точностных и вероятностных характеристик.
Разработку алгоритма распознавания произведем при частично заданной структуре автоселектора скорости радиолокационной системы воздушного базирования (РЛС ВБ) и наличии измерений дальности и собственного ускорения носителя. Пусть справедлива гипотеза Гij о том, что в каждый дискретный момент времени на выходе блока дискретной логики формируются отсчеты доплеровской частоты, обусловленной скоростью сближения носителя РЛС ВБ с вертолетом, соответствующие i -му режиму и j -му набору параметров полета вертолета. При этом справедливы условия (1) и (2).
Р ( r j ) = P ij , i = 1,4, j = 1, 7, (1)
4 J
ZZ P j = 1, (2) i = 1 j = 1
где Pij – вероятность того, что на выходе блока дискретной логики имеется отсчет доплеровской частоты, соответствующий i -му режиму полета вертолета с j -м набором его параметров.
В общем случае наблюдение на входе синтезируемого алгоритма на k -м шаге его работы для каждой гипотезы Г ij будет иметь следующий вид:
Г ij : Y ij ( k ) = H ij ( k ) X ij ( k ) + ξ ij ( k ), (3)
где X ij – вектор состояния, фазовыми компонентами которого являются оцененные значения доплеровской частоты, дальности до вертолета и собственного ускорения носителя РЛС ВБ в радиальном направлении; H ij – переходная матрица наблюдения; ξ ij – вектор-столбец шумов наблюдения, представляющий собой гауссовские «белые» последовательности с нулевым математическими ожиданиями (МОЖ) и матрицей спектральных плотностей N ξ .
Исходя из этого оценка доплеровских частот с учетом дальности до вертолета и собственного ускорения носителя РЛС ВБ должна производиться в нескольких оптимальных фильтрах (ОФ), в каждом из которых априорные сведения, принятые при фильтрации, соответствуют определенной гипотезе относительно режима полета вертолета, т. е. блок оценок в алгоритме распознавания должен быть многоканальным по числу i = 1 , 4.
Кроме того, при справедливости гипотезы относительно i -го режима полета вертолета может иметь место J наборов параметров его полета. В результате блок оценок должен быть многоканальным и по числу наборов параметров полета вертолета при каждой принятой гипотезе относительно режима его полета. Отсюда следует, что блок оценок должен представлять собой матрицу оптимальных фильтров, в каждом из которых производится совместная фильтрация последовательных дискретных отсчетов доплеровских частот, дальности и собственного ускорения. На основе наблюдения (3) в каждом ОФ с учетом принятых априорных сведений производится оценивание истинного вектора состояния X ( k ).
Из полученной совокупности оценок необходимо выбрать только одну Х д , которая в соответствии с выбранным критерием оптимальности была бы наиболее близка к истинному вектору X ij , т.е. гипотезе Г ij .
При условии, что модель наблюдения и вектор состояния являются линейными, можно использовать для синтеза каждого оптимального фильтра многомерную линейную калманов- скую фильтрацию, описываемую, как [1, 2, 3]
P - (к +1) = Ф( k )P (к )ФТ (k) + Q( к +1);(4)
¥( к +1) = H( k + 1)P - (k + 1)HT (k +1) + R( k +1);(5)
K(k +1) = P - (k + 1)HT (k +1) T (k +1);(6)
_
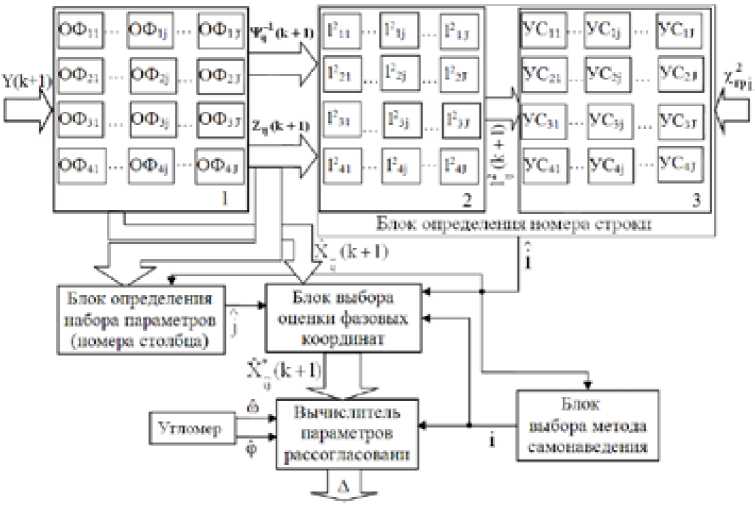
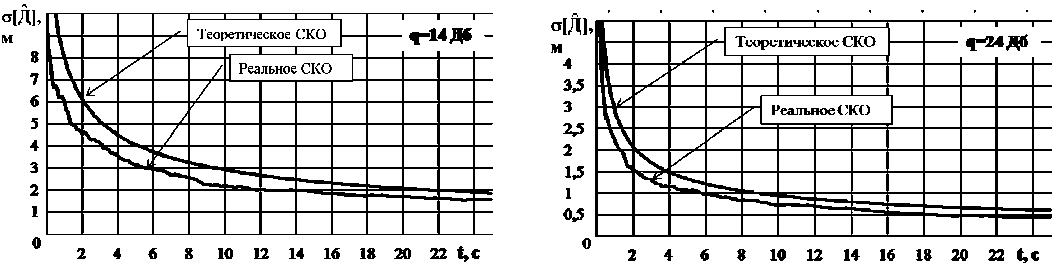
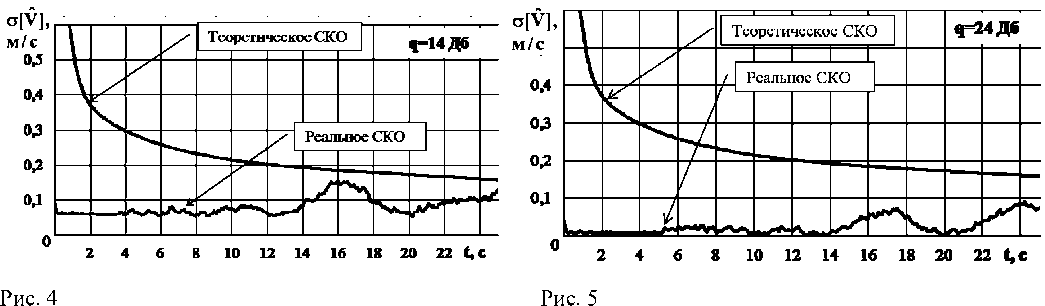
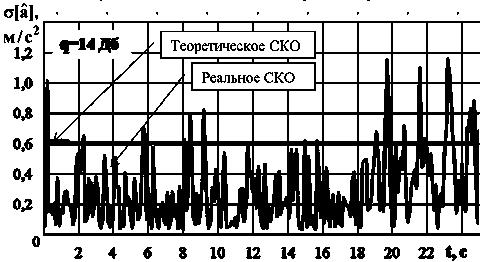
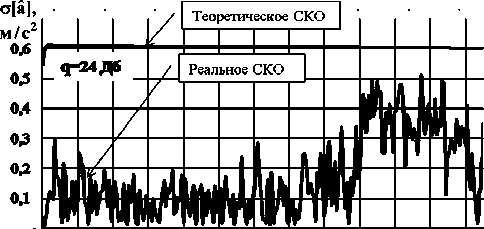
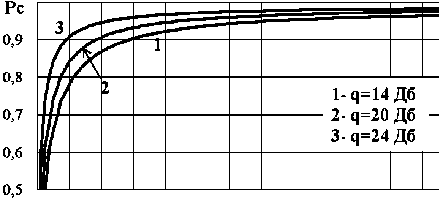
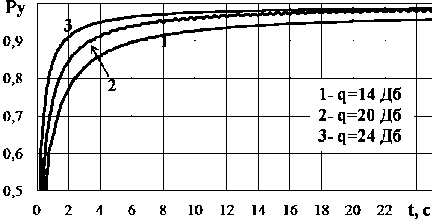
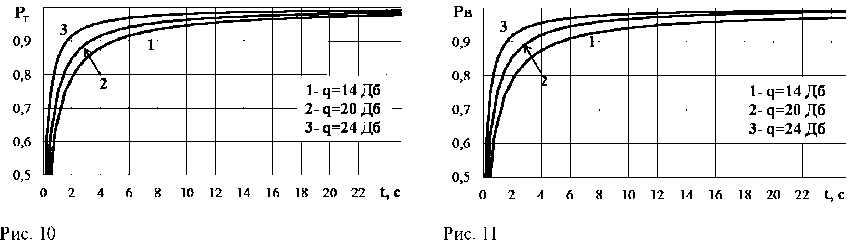
Zk+="'k - -H(k+|)Ф(k ■|)X X(k+1) Ф(k)x(k)+K(k + i)Z(k+1),(8) P( k +1) = [I - K (k + 1)H( k + 1)]P - (k +1),(9) где P (k +1) и P(k +1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно, размерности n×n (n – размерность вектора состояния); Ф(k) – переходная матрица состояния размерности n×n; Q(k+1) и R(k+1) – ковариационные матрицы шумов возбуждения и наблюдения размерности n×n и m×m (m – размерность вектора наблюдения) соответственно; K(k+1) – матрица весовых коэффициентов размерности n×m; Z(k+1) – матрица невязки измерений размерности m×1; I – единичная матрица размерности n×n. Определим основные матрицы данных уравнений для фильтров, настроенных на стационарный полет вертолета, с ускорением, с торможением и полет в режиме висения. Стационарный полет вертолета Система дифференциальных уравнений, описывающих взаимное перемещение носителя РЛС ВБ и вертолета, при его стационарном полете может быть представлена следующим об- В векторно-матричной форме система уравнений (10) будет иметь следующий вид: X = AX +GN X(0) = X0, (11) где А – матрица размерности 11х11, имеющая следующие отличные от нуля элементы: a1,2 = a1,3 = = a1,6 = a1,7= a6,8= –1; a2,4 = 0; a3,5= a7,9 = a7,10= a7,11 = 1; a5,3 = –βв1; a5,5 = –αв1; a9,7= –βн; a9,9= –αн; a11,11 = –αa; G - матрица размерности 11x11, имеющая следующие ненулевые элементы: g; = = лla„iCr2 1 ; 2 |Т , g99 = ^аа^ан ; gп>п = 2аааага ; N = |0,0,0,0,nв1,0,0,0,nн,0,nа - транспонированный вектор формирующих белых гауссовских шумов с нулевыми математическими ожиданиями и единичными интенсивностями, имеющий размерность 11×1. Элементы переходной матрицы наблюдения Н(k) в уравнении (3) будут определяться, с одной стороны, составом измерителей функционально связанных координат, а с другой – условием наблюдаемости фильтра, которое необходимо обеспечить для предотвращения его расходимости. Исходя из этого переходная матрица наблюдения будет иметь размерность 3×11, а ее ненулевые элементы следующие: h1,1= h2,2= h2,3= h2,6 = h2,7= h3,6 = h3,7= 1. Элементы вектора шумов наблюдения ξ(k), имеющего размерность 3×1, являются некоррелированными с элементами вектора шумов возбуждения N(k). Для определения элементов матриц Ф(k) и Q(k) в уравнении (4) необходимо перейти от векторно-матричного дифференциального уравнения (11) в непрерывном времени к аналогичным уравнениям в дискретном виде исходя из следующих соотношений [5]: Ф(k) = eATg, Q( k) = M [J( k )J T( k)],(13) (k+1) Tд J( k) = J Ф[( k + 1)T - r]G(r)N(r)dr,(14) kTд где Тд – период дискретизации. В первом приближении ограничимся линейными членами, т. е. Ф(k) ≈ I + АTд.(15) В результате матрица Ф(k) будет иметь следующие отличные от нуля элементы: φ1,2 = φ1,3 = = φ1,6= φ1,7 = φ6,8 = –Тд; φ3,5 = φ7,9 = φ7,10 = φ7,11 = Тд; φ1,1 = φ2,2 =φ3,3 = φ4,4 = φ6,6 = φ7,7 = φ8,8 = φ10,10 = = 1; φ5,3 = –βв1Тд; φ5,5 = 1–αв1Тд; φ9,7 = –βнТд; φ9,9 = 1–αнТд; φ11,11 = 1–αaТд. После преобразований, определяемых формулами (13) и (14), и ограничении линейными членами, ненулевыми элементами ковариационной матрицы Q(k) шумов возбуждения будут являться следующие: q5,5 = 2а^ставт;q9,9 = 2«н^Hтд; qii,ii = 2«аста2тд; q9,11 = qii,9 = V^^H^I^O^ITg; q5,9 = q9,5 = V4«в1СТав1«нСТ2Тд; q5,11 = qn^ = ^а^ааО-"2Тд. Полет вертолета с ускорением Модель вектора состояния, описывающего взаимное перемещение носителя РЛС ВБ и вертолета при его полете с ускорением (индекс 2), представляет собой следующую систему дифференциальных уравнений: Д (t) = -(Vb2( t) + A Vb2( t) + Vн (t) + A V (t)), Д(0) = Д 0; V.;- t ) = a B2( t), * b2(V)* в20; Cb2( t) = 0, aв2(0) = 0; A Vb2( t) = A а в2( t), A V32(0) = 0; Aaie2(t) = -ав2Аав2(t) -Pb2AVb2(t) + V2ae2aавв n в2 (t), Aa в2(0)= 0; VTH (t) = 0, VH (0) = VH0; (16) A V>h( t) = - ан (t), A VH (0) = 0; 01h (t) = 0, a н (0) = 0; A С1н (t) = -ан A a н (t) - ^hA Vн (t) + V^aH^2n н (t), A aH (0) = 0; A а (t) = 0, A а (0) = A ад; Ua (t) = —aa Ua (t) + V2aa^a na (t), U a(0)= U a0- Матрица А размерности 11×11 имеет следующие отличные от нуля элементы: a1,2 = a1,3 = = a1,6 = a1,7 = a6,8 = –1; a2,4 = 1; a3,5 = a7,9 = a7,10 = a7,11 = 1; a5,3 = –βв2; a5,5 = –αв2; a9,7 = –βн; a9,9 = –αн; a11,11 = –αa. Матрица G размерности 11×11 имеет следующие ненулевые элементы: g5,5 = ; g= 2 ; gu,n = ^. N = |0,0,0,0, n b2,0,0,0, n н ,0, nа|Т. Матрица Ф будет иметь следующие отличные от нуля элементы: φ1,2 = φ1,3 = φ1,6 = φ1,7 = = φ6,8= –Тд; φ3,5 = φ7,9 = φ7,10 = φ7,11 = Тд; φ1,1= φ2,2 = φ3,3 = φ4,4= φ6,6 = φ7,7 = φ8,8 = φ10,10 = 1; φ5,3 = –βв2Тд; φ5,5 = 1–αв2Тд; φ9,7 = –βнТд; φ9,9 = 1–αнТд; φ11,11 = 1–αaТд. Ненулевыми элементами ковариационной матрицы Q шумов возбуждения будут являться следующие: 2, 2, 2 2 _2^ q9,9 2«н^нТд; qll,ll 2«а^аТд, q5,5 2«в^ав2Тд; q5,9 q9,5 ^“в2^ав2“нСТнТд; / 5 5 Гл 2 2ГГ~ q5,11 = 911,5 = 4аС2в1ав2в2«аа2Tg; q9,11 - q11,9 - х^^.нн«а^аТд. Полет вертолета с торможением Вектор состояния, описывающий взаимное перемещение носителя РЛС ВБ и вертолета при его полете с торможением (индекс 3), имеет следующий вид: Д (t) = -(Ve3( t) + A Vb3( t) + Vh (t) + A Vh (t)), Д(0) = До; Vb3(t) = —a b3(tX Vb3(0) = Vb30; ae3(t) = 0 a B3(0)= 0; • AVb3(t) = Aав3(t), AVB3(0)=0; Aав3(t) = aB3Aав3(t)-^b3AVb3(t) + д/2ав3стОВв Яв3(t) Aaв3(0)= 0; VH(t) = ° vh(0)= vh0;(17) A VH (t) = —аH (tX A VH (0)= 0; ан(t) = 0 aH (0)=0; A ан (t) = —ан Aa н (t) —PhAVн (t) +V 2анСТнЯн (t), Aa н (0)= 0; Aa (t) = 0, Aa (0)= Aа0; • 2" ^a (t) = —«aUa (t) + V2«a^а Яa (t), Ua(0)= UaO- Матрица А размерности 11×11 имеет следующие отличные от нуля элементы: a1,2 = a1,3 = = a1,6 = a1,7 = a6,8 = –1; a2,4 = –1; a3,5 = a7,9 = a7,10 = a7,11 = 1; a5,3 = –βв3; a5,5 = –αв3; a9,7 = –βн; a9,9 = –αн; a11,11 = –αa. Матрица G размерности 11×11 имеет следующие ненулевые элементы: 2^; ; g,,, = OS; g.,11 = 2^. Т N= |0,0,0,0,nB3,0,0,0,nр ,0,na | . Матрица Ф будет иметь следующие отличные от нуля элементы: φ1,2 = φ1,3 = φ1,6 = φ1,7 = φ6,8 = = –Тд; φ3,5 = φ7,9 = φ7,10= φ7,11= Тд; φ1,1 = φ2,2 = φ3,3 = φ4,4 = φ6,6 = φ7,7 = φ8,8 = φ10,10 = 1; φ5,3 = –βв3Тд; φ5,5 = = 1–α в3Тд; φ9,7= –βнТд; φ9,9= 1–αнТд; φ11,11 = 1–αaТд. Ненулевыми элементами ковариационной матрицы Q будут являться следующие: 222 q99 = 2=.,нT,;qlu, = 2=.,аT.;q5,5 = 2а13О„3Тд; q5,9 = q9,5 = V4«в3,ав3«н,2T. ; q5Jl = q,, 5 = V4«в3,2в3«а,2T.; q 9 ,ll = q,l ,9 = ^^н^н2^Hi^a^a T. ■ Полет вертолета в режиме висения Модель вектора состояния, описывающего взаимное перемещение носителя РЛС ВБ и вертолета при его полете в режиме висения (планерная составляющая спектра сигнала отсутствует, имеет место лишь спектральная составляющая, обусловленная отражениями сигнала от силовой установки вертолета), имеет следующий вид: VJ (t) = 0, v-! (0) = 0; aBy(t) = 0, aвсу (0) = 0; A V,' (t) = A a By (t), A Y^ (0) = 0; А асу (t) = A a By(t) + 720457 n (t) A a By(0) = 0; VH (t) = 0, Vн (0) = Vн0; (18) A Vh (t) = - аH (t), A Vh (0) = 0; ан (t) = 0, a н (0) = 0; Aalp(t) = -«hAaн (t) -PhAVh(t) +V2«h^H nн (t), Aaн (0)= 0; • Aa (t) = 0, Aa (0)= Aa0; Ua( t ) = -«a Ua( t ) + V 2«a°'an a( t ), Ua(0) = U, где индекс «су» относится к силовой установке вертолета. Матрица А размерности 11×11 имеет следующие отличные от нуля элементы: a1,2 = a1,3 = = a1,6 = a1,7= a6,8= –1; a2,4 = –1; a3,5= a7,9 = a7,10= a7,11 = 1; a5,5 = –αв4; a9,7= –βн; a9,9= –αн; a11,11 = –αa. Матрица G размерности 11×11 имеет следующие ненулевые элементы: g 5,5 = V 2«B-A3; g 9,9=22=^21; g 11,11 = 7 2«."a • N= 0,0,0,0,nв4,0,0,0,nн,0,nаТ. Матрица Ф будет иметь следующие отличные от нуля элементы: φ1,2 = φ1,3 = φ1,6 = φ1,7 = = φ6,8 = –Тд; φ3,5 = φ7,9 = φ7,10 = φ7,11 = Тд; φ1,1 = φ2,2 = φ3,3 = φ4,4 = φ6,6 = φ7,7 = φ8,8 = φ10,10 = 1; φ5,5 = = 1–αв4Тд; φ9,7 = –βнТд; φ9,9 = 1–αнТд; φ11,11 = 1–αaТд. Ненулевыми элементами ковариационной матрицы Q шумов возбуждения будут являться следующие: q5,5 =2αв4σа2в4Tд;q5,9=q9,5= 4αв4σа2в4αнσн2Tд; q5,11= q11,5= 4αв4σа2в4αаσа2Tд; q9,9=2αнσн2Tд; q11,11=2αаσа2Tд; q9,11 =q11,9 = 4αнσн2αаσа2Tд. После оценки фазовых координат взаимного перемещения вертолета и носителя РЛС ВБ в каждом калмановском фильтре необходимо найти такой ОФ из их матрицы в блоке оценок, в котором априорные сведения относительно режима и набора параметров полета вертолета будут наиболее близки к реально наблюдаемому процессу на его входе. При этом будет иметь место структурная неопределенность, обусловленная множествами гипотез относительно режима полета вертолета, и параметрическая неопределенность, обусловленная множествами гипотез относительно наборов параметров при каждом режиме его полета. Следовательно, в дальнейшем возникает необходимость проверки совокупности гипотез в соответствии с выбранным критерием согласия. В рамках калмановской теории фильтрации целесообразным является использование критерия согласия χ²-Пирсона, применяемого для проверки соответствия экспериментальных данных теоретической модели [6]. Согласно этому критерию на основе экспериментальных данных (в данном случае наблюдаемого процесса на входе алгоритма распознавания) формируется случайная величина l2, которая при совпадении реального процесса и его модели должна обладать свойствами χ2, т.е. l2 = χ2. Случайная величина l2 при калмановском подходе определяется следующим образом: l2(k+1)=ZT(k+1)Ψ-1(k+1)Z(k+1), (19) где векторы Ψ(k+1) и Z(k+1) определяются в соответствии с уравнениями (5) и (7) соответственно. Проверка согласия априорных сведений реально наблюдаемому процессу производится путем вычисления величины l2(к+1) и сравнения ее с граничным значением хгр, соответствую- щим заданным степени свободы Лсв и уровню вероятности ошибки Рош(х > Хгр )• Количество степеней свободы определяется размерностью вектора наблюдения Y(k+1), т.е. Sсв=3. Значения х2 (5св, Рош) табулированы. Так, если гипотеза Гij верна (при дополнительном условии, что статистические характеристики вектора ξ (k) шумов наблюдения (формула (3)) заданы правильно), то должно выпол-ij няться условие lj(k + 1) < хгрА5св,рош), (20) в противном случае это условие не выполняется. Для определенности и упорядочивания примем расположение ОФ в их матрице таким, чтобы в каждой строке матрицы находились бы ОФ с постоянными априорными сведениями о режиме полета вертолета (стационарный полет, с ускорением, с торможением, висения), а в каждом столбце – ОФ с различными априорными сведениями о параметрах полета. Тогда алгоритм нахождения такого ОФ из их матрицы в блоке оценок, в котором априорные сведения относительно режима и набора параметров полета вертолета будут наиболее близки к наблюдаемому процессу на его входе, заключается в следующем. 1. Для каждого оптимального фильтра их матрицы производится вычисление соответствующих значений lj(k+1) по формуле (19). 2. Осуществляется сравнение полученных величин 12 (к +1) с соответствующими значениями хГр _ (5св, Рош) (формула (20)). 3. Определяется максимальный номер строки матрицы оптимальных фильтров, где находится хотя бы один фильтр, для которого выполняется условие (20). Значение номера строки и будет соответствовать оценке режима полета вертолета i . Условие (20) может быть выполнено сразу в нескольких ОФ данной строки их матрицы, т.е. в общем случае не исключена и параметрическая неопределенность. Разрешение параметрической неопределенности при калмановском подходе возможно произвести по критерию минимума обобщенной дисперсии DΣ(k+1) действительных ошибок фильтрации в установившемся режиме для всех составляющих вектора Xˆ (k), определяемую как [1] ij D, jk+1) = ZТ(k + 1)Z;,(k +1). (21) Отсюда следует, что алгоритм определения набора параметров полета вертолета (номера j-го столбца) заключается в том, что для каждого ОФ, определенного выше строки их ма-– 366 – трицы, по формуле (21) производится вычисление соответствующих значений D^ ^. (к +1) и определяется номер столбца матрицы, где находится тот оптимальный фильтр, для которого -эта величина минимальна. Значению номера столбца и будет соответствовать оценка j -го набора параметров полета вертолета. На рис. 1 представлена структура алгоритма распознавания. На рис. 1 введены обозначения: 1 – блок оценок; 2 – блок вычисления величины l2; 3 – блок сравнения; УС – устройство сравнения. Значения точностных и вероятностных характеристик синтезированного алгоритма распознавания были получены путем моделирования. В качестве примера на рис. 2–7 для ситуации стационарного полета вертолета изображены графики временных зависимостей теоретических и реальных среднеквадратических ошибок (СКО) фильтрации дальности «носитель РЛС ВБ – вертолет», скорости полета и ускорения вертолета при значениях отношения сигнал/шум (q) 14 и 24 дБ, которые иллюстрируют качество сходимости работы ОФ. Для других режимов полета вертолета данные оценки также являются сходящимися. Рис. 1 Fig. 1 Рис. 2 Рис. 3 Fig. 2 Fig. 3 На рис. 8–11 представлены зависимости вероятностей правильного распознавания стационарного режима полета вертолета (РС), с ускорением (РУ), с торможением (РТ), в режиме висения (РВ) при отношениях сигнал/шум 14, 20 и 24 дБ, а в табл. 1 – значения МОЖ (M[·]), СКО (σ[·]) и доверительных интервалов (I0,95) вероятностей правильного распознавания при времени сопровождения-распознавания 2 с. Из анализа приведенных результатов следует, что вероятность правильного распознавания режима полета вертолета при времени сопровождения-распознавания 2 с и отношении сиг-нал/шум q = 14…24 дБ составляет: для стационарного полета – 0,75…0,93; для полета с ускорением – 0,74…0,91; Fig. 4 Рис. 6 Рис. 7 Fig. 6 Fig. 7 Fig. 5 2 4 6 8 10 12 14 16 18 20 22 t,c 0 2 4 6 8 10 12 14 16 18 20 22 t, C Рис. 8 Fig. 8 Рис. 9 Fig. 9 Fig. 10 Fig. 11 Таблица 1 Table 1 для висения – 0,75…0,92. Таким образом, на основе многомерной линейной дискретной калмановской фильтрации и при частично заданной структуре автоселектора скорости носителя РЛС ВБ был синтезирован алгоритм распознавания режима полета вертолета и получены его точностные и вероятностные характеристики.
разом:
Д (t) = "(ТВ1( t) + A VB1 ( t) + Vh (t) + A Vh (t)), Д(0) = Д о;
•
Vb1( t) = 0, Vbi(0) = Vbio;
0d( t) = 0, a b1(0) = 0;
AVb1( t) = A а в1( t), A Vb1(0) = 0;
A аГв1( t) = -«B1A а В1 (t) - Pb1A Vb1( t) + V 2«В1^ а2вв n B1(t), A a b1 (0) = 0;
-
VH (t) = 0, VH (0) = Vh0; (10)
A V. (t) = - ан (t), A Vh (0) = 0;
aH (t) = 0, a н (0) = 0;
A ан (t) = -ан A a н (t) - вн A Vн (t) + V 2«н^H n н (t), A a н (0) = 0;
A а (t) = 0, Aa (0) = A а0;
UJa (t) = -aa Ua (t) + ^2 a2 na (t), Ua (0) = U a0,
где Д – наклонная дальность между носителем РЛС ВБ и вертолетом; Vв1 и ∆Vв1 – детерминированная и флюктуационная составляющие радиальной скорости полета вертолета; aв1 и ∆aв1 – детерминированная и флюктуационная составляющие ускорения вертолета (индекс 1 указывает на стационарный режим полета вертолета); Vн и ∆Vн – детерминированная и флюктуационная составляющие скорости полета носителя РЛС ВБ на участке его самонаведения; aн и ∆aн – детерминированная и флюктуационная составляющие ускорения полета носителя РЛС ВБ на участке его самонаведения; ∆a – постоянная ошибка акселерометра носителя РЛС ВБ, обусловленная погрешностями начальной выставки гироплатформы, нескомпенсированным дрейфом гироскопов; Ua – низкочастотная ошибка измерения, обусловленная шумовыми составляющими ошибок акселерометра [4].
q, дБ
Вероятность
M[∙]
σ[∙]
I0,95
14
РС
0,76
0,02
0,75; 0,78
РУ
0,75
0,03
0,74; 0,77
РТ
0,77
0,02
0,75; 0,78
РВ
0,76
0,02
0,75; 0,77
20
РС
0,82
0,03
0,83; 0,85
РУ
0,83
0,02
0,82; 0,84
РТ
0,83
0,02
0,81; 0,84
РВ
0,83
0,03
0,81; 0,85
24
РС
0,91
0,02
0,90; 0,93
РУ
0,9
0,01
0,89; 0,91
РТ
0,9
0,02
0,89; 0,92
РВ
0,91
0,01
0,90; 0,92
для полета с торможением – 0,75…0,92;
Список литературы Точностные и вероятностные характеристики алгоритма распознавания режима полета вертолета в радиолокационной системе воздушного базирования
- Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. Часть 1. Теоретические основы синтеза и анализа авиационных систем радиоуправления. Часть 2. Радиоэлектронные системы самонаведения. М.: Радио и связь, 1996. 396
- Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. М.: Радио и связь, 1991. 608
- Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. Пер. с англ. М.: Радио и связь, 1993, 320
- Ярлыков М.С. Статистическая теория радионавигации. М.: Радио и связь, 1985. 345
- Тихонов В.И. Нелинейные преобразования случайных процессов. М.: Радио и связь, 1986. 296
- Тарасов В.Г. Межсамолетная навигация. М.: Машиностроение, 1980. 185
