Топологический анализ сингулярных состояний и синтез явных законов настройки силовых гирокомплексов кратных схем

Автор: Сомов Е.И.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 3-1 т.11, 2009 года.
Бесплатный доступ
Выполняется топологический анализ особых (сингулярных) состояний силовых гироскопических комплексов (СГК) кратных схем на основе четырех и шести гиродинов. Предлагаются явные законы настройки таких СГК, которые основаны на аналитических соотношениях и позволяют эффективно прогнозировать реализуемость планируемого углового движения космического аппарата.
Силовой гироскопический комплекс, кратная схема, законы настройки
Короткий адрес: https://sciup.org/148198581
IDR: 148198581 | УДК: 629.78
Topological analysis of singular states and synthesis of the explicit tuning laws for the gyro moment clusters by multiply schemes
Topologial analysis of the singular states at the gyro moment clusters (GMCs) by multiply schemes based on four and six gydodines, is developed. Explicit tuning laws for such GMCs are suggested. These tuning laws are based on analytic relations and have perfect opportunities for forecasting a realization of a spacecraft planned angular motion.
Текст научной статьи Топологический анализ сингулярных состояний и синтез явных законов настройки силовых гирокомплексов кратных схем
Электромеханические системы, широко используемые в настоящее время для управления ориентацией космических аппаратов (КА), интенсивно изучаются уже более 50 лет 111 Из-за свойства усиления момента силовые гироскопы с одностепенным подвесом - гнродины(ГД) всегда считались перспективным, но сложным в отношенгш правления,классом электромеханических исполнительных органов. В статье рассматриваются проблемы топологического анал и -за особых (сингулярных) состояний силовых гироскопических комплексов (СГК) для кратных гиродннных систем, которые представляются коллинеарными группами гиродиноа где орты осей подвеса в каждой группе параллельны, и синтеза явных законы настройки СГК, которые имеют преимущества и отношении прогнозирования реализуемости планируемого движения КА и обеспечения характеристик точности силовой гироскопической стабилизации КА.
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ
В рамках прецессионной теории с иловых ги-|мк"копови щки-гейшего моде. си| я таи ия движения КА, как абсолютно твердого ила, нетрудно пошли । ь принципиальные проблемы, возникающие в СГК на основе избыточного числа щ > 4 безунорлых гирОДИНОв.
Введем кватернион А ориентации снизанного с корпусом КА базиса ц относительнонекоторого инерциального базиса [ и вектор щ абсолютной угловой ско|мнти КА. Свяжем с каждым I =l + w ГД, имеющих вектор кинетического момента (КМ) Н, =А, h, соди-
(Vzwwr Кнгяиий П/штмич, м«я<ш<«т iwwiivmit шщ, <*мунт, заведующий огааежч. Е mail: etomot^mail.ru паковым модулем hK, правый триэд его осей: орт h,(p,) вектора КМ ГД, положение которого определяется углом [5,, фиксированный в базисе В орт g оси подвеса ГД и орт р,(р,) = h,(p, )xg Введем также вектор-столбец р = {р,}, составленный из углов поворота ГД относительно осей их подвеса Тогда вектор суммарного нормированного КМ СГК h(p) = Lh (р,) ,а орт управляющего гироскопического момента /-го гнроднна представляется в виде
щ * (Р,) = -= g * К (р,) = - р, (р,,) OR
Все векторы и тензор инерции корпуса КА J представляются л базисе В и определяется прямоугольная матрица Якоби Ah । р I = | а. (р,)] = Э h / <) Р = | m * (Р,) |. О п редел и м нормированный к значению А# вектор КМ корпуса КА в виде к < г) = Jbx/)/^ и дня простоты будем считать, что вектор суммарного нормированного КМ механической системы ~КА+СГК" R(/) = k<0+ hip(О)=« IIусть при отсутствии внешнего возмущающего момента Vfe Tr = К-tf ] заданы функции времени А(г)и «>, представляющие программное угловое движение базиса В относительно базиса I, которое описывается дифферен пиал ьн ым и уравнен и ям и A=A-w2; к(О = -т#(Р,р). Здесь вектор нормированного управляющего момента СГК m-ф.р) = £т?(Р,)й вычисляется по формуле т^фф) = А„ф) u*; Р = u\ где “управлением** считается вектор-столбец р = и* = {и*} с компонентами и* скоростей прецессии ГД, ограниченных по модулю заданным значением u"=consl.
Пусть заданы значения нормированных к значению Ае векторов кинетического момента hipfeScR’ СГК и потребного управляющего СГК тл € McR' ■ Тогда приходим к двум нелинейным векторным уравнениям hip(/))=-k(f); А),фф = m* втрехмерном про- странстве относительно векторов-столбцов Р = {Р,} и р = {Д }, каждый из которых имеет размерность т .
Первая принципальная проблема заключает -ся в построении внешней граничной поверхности Э S = S* с R3 области S вариации КМ СГК, форма которой существенно зависит от числа т ГД и расположения ортов 9, осей их подвеса в базисе В , а также в анализе условий разрешимости уравнений указанных нелинейных векторных уравнений при возможном уменьшении ранга матрицы Якоби Ah(P) для особых (сингулярных) состояний СГК. Таким состояниям соответствуют расположения конца вектора h(P) как на поверхности S*, так и на поверхностях h£ весьма сложной структуры внутри области s • Сингулярные состояния СГК возникает при таких положениях ГД, когда матрица Грамма С(М(Р)) = Сф)=Аьф)А^(Р) теряет полный ранг, т.е. при G(P) - det(G(P)) = О . Здесь наиболее сложными являются задачи анализа свойств поверхностей h^, где возникают ветвления решений указанных выше нелинейных алгебраических уравнений. В точках таких поверхностей возникает неоднозначность движения гиродинов в составе СГК или клинч некоторой совокупности ГД, особенно если не используются алгоритмы доопределения их состояний и управлений в окрестности этих поверхностей. На основе аналитических критериев знакоопределенности квадратичных форм для локальных переменных в окрестности точек сингулярных состояний гиродинных систем внутри области S в оригинальных работах [2, 3] для произвольных схем СГК проведена классификация поверхностей hl на проходимые h*( непроходимые поверхности типа ha, которые гладко сопрягаются с поверхностью S* (т.е. являются гладкими продолжениями поверхности S* внутрь области s , и непроходимые поверхности типа hp, изолированные от граничной поверхности S*.
Вторая принципиальная проблема заключается в обосновании законов настройки СГК -законов распределения вектора h(P) его суммарного нормированного КМ между избыточным числом ГД с учетом необходимости обхода либо прохождения сингулярных состояний СГК. Угловые скорости каждого ГД относительно оси его подвеса ограничены по модулю заданным значением и™, что существенно нелинейным образом “трансформируются” в ограничения на компоненты вектора нормированного управляющего момента СГК m (Р,0), т.е. моментные характеристики СГК зависят как от предыстории, таки текущего расположения векторов КМ гиродинов в его составе. Для общего класса гиродинных систем в свое время [1] были теоретически обо снованы неявные законы настройки СГК, осно-ваные на различных вариантах псевдообращения матрицы Якоби Ah(p) с текущей оптимизацией определителя G матрицы Грамма либо другого скалярного выпуклого функционала Ф(Р) для сигнализации приближения состояния СГК к множествам ht внутри области § •
При одинаковом числе применяемых ГД класс кратных гиродинных систем уступает пространственным гиродинным системам общего вида как по размерам области S вариации КМ, так и по критерию сферичности ее границы S*. Однако СГК кратных схем имеют три весьма существенных достоинства: граница S* области вариации КМ СГК всегда совпадает с ее выпуклой оболочкой, все поверхности ht особых состояний СГК внутри области s являются проходимыми, т.е. неверностями типа h*, и для таких схем могут быть обоснованы явные законы настройки, где все характеристики потребного движения каждого ГД получаются по аналитическим соотношениям.
В сингулярном состоянии СГК G(P) = det(G(P)) = О и любой набор из векторов-столбцов a, =mf в составе матрицы Якоби А ДР) не позволяет составить базис трехмерного пространства. Следовательно, в этом случае все векторы a = mf становятся компланарными (принадлежат одной плоскости) и в суммарном векторе нормированного управляющего момента СГК m^P,P) = Smf(P,)P, отсутствуют компоненты вдоль орта и нормали к этой плоскости. Орт и называется сингулярным и определяется из условия и • а, = и1 а, = ОД = I + m. Ранг матрицы Ah может быть равным 1 только в том случае, когда орты g осей подвеса ГД принадлежат одной плоскости. Каждому сингулярному состоянию СГК с нормированным КМ h* и сингулярной точкой р* вектора-столбца углов прецессии ГД соответсвует сингулярный вектор и , одинаковый для векторов h и -h" .Для единообразного учета этих двух вариантов направлений векторов h* вводится набор знаков е = (в,, z = 1 + т), где е, = sign(u ЬД , причем набор е представляется по типу (н—и-....+), всего 2<м комбинаций с учетом симметрии. В сингулярной точке имеем соотношения
-
a, =a*=e,g,xu/|g,xu|;
h* = SE,(g,.xu)xg,/|g,xu|, где последнее соотношение определяет непрерывное отображение u => h* с набором знаков е = (е, ) как параметров. Область вариации орта и представляет собой единичную сферу с выколотыми точками, которые соответвуют ортам ±д;. Для гиродинных систем общего вида при и = ±gz произвольное положение каждого / -го
ГД удовлетворяет условию сингулярности, что на граничной поверхности представляется единичными окружностями, которые являются границей “вмятин” (кратеров) с осями по ортам ±д, , всего 2/» кратеров. “Сингулярые” поверхности ф с различными наборами знаков г соединяются на указанных окружностях. Граница S* области вариации вектора суммарного КМ СГК всегда является сингулярной поверхностью. Основная часть граничной поверхности S* представляется поверхностью ht со всеми положительными знаками е, в наборе е = (еД , а другие ее части получаются при одном отрицательном знаке в различных наборах знаков е и для гиродинных систем общего вида представляют собой внутренние поверхности кратеров, которые гладко соединяются с указанной основной частью на единичных окружностях [3].
Кратные гиродинные системы с к коллинеарными группами, где каждая s -ая группа содержит ms гиродинов и 2, ms = т , имеют ряд сингулярных поверхностей, в том числе поверхность, которая содержит 2^ кратеров с осями по ортам ±gf и радиусами, значения которых определяются числом ms, s = Y-^к в каждой группе и знаками е, в наборе £ = (еД . При u = ±д,- всевозможные сингулярные положения гиродинов формируют круговые плоскости, которые прикрывают 2к кратеров. Другие сингулярные поверхности с различными наборами знаков е, гладко сопрягаются с этими круговыми плоскостями по окружностям соответствующего радиуса. Граница S* области вариации КМ СГК представляет собой сингулярную поверхность и указанные круговые плоскости радиусом ms со всеми положительными знаками е, в наборе Е = (еД , т.е. граничная поверхность §* совпадает с ее выпуклой оболочкой. При одном отрицательном знаке в наборе е = (е, ) любая сингулярная поверхность Ф не представляет собой часть (продолжение) граничной поверхности §*, т.е. такие поверхности НА являются полностью внутренними - типа h*.
Если при векторе КМ h = h СГК должен сформировать управляющий момент m (0, 0) в направлении заданного орта и , то возможны два случая [4, глава 4]:
перераспределяя положения ортов h р (0^) ГД относительно неизменного суммарного КМ СГК h Xh =h* можно обеспечить управляющий момент в направлении орта и , тогда сингулярная точка h = h называется проходимой в направлении орта и ;
никаким перераспределением положения ортов h ГД относительно неизменного суммарного КМ СГК h = h нельзя сформировать управляющий момент в направлении орта и , при этом сингулярная точка h = h* называется непроходимой в направлении орта и .
Аналитическое определение проходимости конкретной особой (сингулярной) точки h' выполняется на основе топологического анализа типа сингулярной поверхности ht в малой окрестности этой точки.
Пусть орт и , в направлении которого необходимо сформировать вектор управляющего момента пС СГК, является ортом нормали к поверхности К , орты h* представляют значения КМ отдельных ГД в особой точке и 0* - со-ответветствующие им углы прецессии ГД. Разложением векторной зависимости h(0) врядТей-лора в окрестности особой точки h* по степеням компонентов вектора-столбца 80 = 0 - 0* вариации углов ГД с удержанием членов только второго порядка малости выводится соотношение
Ah h(0) -М(0Д = 2, а,80, -12, h,(80Д2.
Вычисляя проекцию вектора дМ на орт и , получаем квадратичную форму
Ah„ - Ah u = 4(2, h, (80,)2) - u = Ц2, (1/Д)(80,)2, где параметры р. = l/(h, и) используются в определении гауссовой кривизны к сингулярной поверхности ht в малой окрестности точки h* , в данном случае согласно формуле
1 / к = 12, 2у Р.Р] (а, • (а. хи))2.
Особая точка является проходимой, если можно создать положительную вариацию дЬ„ при неизменности суммарного КМ СГК h = h*.
Предложенный Е.Н. Токарем и В.Н. Платоновым [3] метод анализа проходимости особой точки основан на следующих положениях. Касательная плоскость к особой поверхности определяется двумя ортами v и w из условий v • и = 0 , w • и = О и у • w + L Неизменность суммарного КМ СГК h = h приводит к необходимости выполнения двух очевидных условий
Ahv s дЬ • v = 2,- (а, • v)80, = 0;
д11и, е дН • w = 2,- (а, • w)80, = 0 , которые представляют собой систему двух линейных уравнений относительно т переменных 80,., z = 1 е т . Если ранг этой системы равен 2 (что достигается выбором ортов v и w в касательной плоскости), то можно выразить 80, для каких-либо двух ГД через 80, для остальных т-2 гиродинов. Подстановка этих двух полученных 80, в выражение для дЬи приводит к квадратичной форме q„ порядка т - 2 относительно 80,.. Если квадратичная форма qn является отрицательно определенной, то делается заключение -особая точка является непроходимой в направлении и . Выполненный по указанной методике топологический анализ [5] показал принципи- альную проходимость всех полностью внутренних сингулярных поверхностей h£ для кратных гиродинных систем, т.е, для таких систем доказана принадлежность всех внутренних сингулярных поверхностей типу h •
ПОСТАНОВКА ЗАДАЧИ
Возможность формирования СГК вектора трехмерного нормированного управляющего момента т8(р,Р) в особом состоянии СГК (при h = h*) теряется только при некоторых вполне определенных расположениях ортов h, (Р,) КМ ГД относительно вектора суммарного нормированного КМ СГК h = h*, т.е. только при определенных особых значениях вектора-столбца углов прецессии ГД р = р*, Поэтому при управлении СГК необходимо “приходить” в особые точки h = h* с “неопасным” расположением гиродинов, используя для этого законы настройки - регулирования взаимного положения избыточного числа ГД за счет организации так называемого нуль-движения гиродинов в составе СГК. Для синтеза явных законов настройки СГК по аналитическим соотношениям факта принципиальной проходимости всех полностью внутренних сингулярных поверхностей недостаточно.
Коллинеарная пара безупорных ГД в известной работе J.W.Crenshaw (1973) была названа Scissored Pair Ensemble (SPE), а кратные схемы на основе 2 и 3 коллинеарных пар ГД - как 2-SPE и3-SPE, рис. 1 ирис.2соответственно. На этих рисунках представлены канонические структуры указанных схем, когда оси подвесов ГД параллельны осям ортогонального канонического гироскопического базиса (КГБ) G40xty^zt) , который будем считать совпадающим с базисом в • Силовые гирокомплексы должны обеспечивать потребную рабочую область S8 с S вариации суммарного КМ h(P) = Sh (Р,).
Ставится задача исследования свойств кратных схем 2-SPE и 3-SPE в части построения и топологического анализа проходимости всех внутренних сингулярных поверхностей, а также синтеза явных законов настройки СГК указанных схем с исключением избыточности и сингулярности в рабочей области Ss .
СИНГУЛЯРНЫЕ ПОВЕРХНОСТИ
Введем обозначения проекций ортов КМ каждого ГД на оси ортогонального КГБ Gc(Ox®y®z®) , см. рис. 1 и рис. 2:
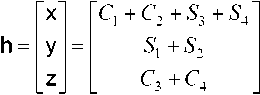
X; = С] = cos Р,; х2=С2 = cos Р2;
у У ^ sin pj; y2=S2 = sin P2;
x3 = X3 = sin P3; x4=S4 = sin P4;
z3= Сз = cos P3; z4 = C4 = cos P4 ;
v5 = C5 = cos p5; y6 =C6= cos P6;
% = S5 = sin P5; z6 = S6 = sin P6.
Тогда вектор-столбец нормированного суммарного КМ СГК h в ортогональном КГБ (у и градиентная матрица Якоби Ah(P) = dh/dp представляются для схемы 3-SPE в виде
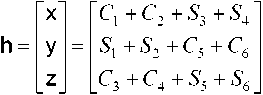

Ah(P) = С,

с3 с4 о о о о -s5 -s6
-S3 -s4 с5 s6
а для схемы 2-SPE - в виде
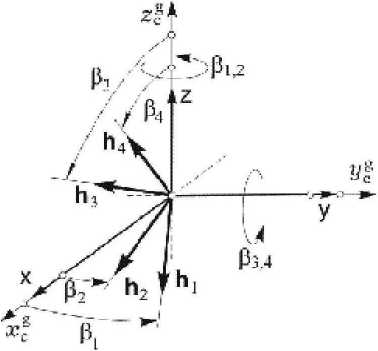
Рис. 1. Схема 2-SPE и отсчет углов ГД
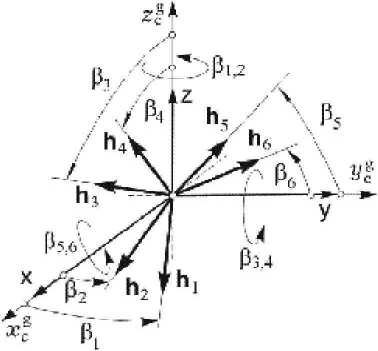
Рис. 2. Схема 3-SPE и отсчет углов ГД
Как указано выше, сингулярные состояния СГК возникает при таких положениях ГД, когда матрица Грамма G(h (р)) = G(P) = Ah (р)^(Р) теряет полный ранг, т.е. при значениях G = det(G (р)) = 0 .
Для схемы 2-SPE при обозначениях

а, е [-л,+л];
определитель матрицы Грамма выражается в симметричном виде
G = 2.[(C2C2+ед)Х2 +(СХ1+<<)-^51]-
Поэтому все естественные сингулярные состояния этой схемы СГК, в которых этот определитель принимает значение G = 0, описываются единым соотношением
(CaCsSsC$j = 0)&(SaSsS&Cs. =0), б/еР?2К i* j.
Анализ этого соотношения приводит к аналитическому описанию всех естественных множеств сингулярных состояний СГК по схеме 2-SPE.
A. u*g,,u*g2
-
1. Р1=Р2 ;Р3=Р4; (1)
-
2. Р1=Р2;Р3=Р4; (2)
-
3. Pj =Р2+л; Р3 =Р4; (3)
Е = (+ + ++) *
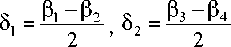
[(S5. = 0)] => 8, = 0, / = 1,2 : обе пары ГД находятся во внешнем одинаково направленном сингулярном состоянии, при этом конец вектора h принадлежит трехмерной части граничной поверхности
S* = {h(x, у^Дх2 + у2 + z2 - 2 ^ ^z - 8 = 0}, rae^s=V4-s2, |s|<2, s y.z- рис. Зои рис. 4.
Е = (+ + —) или £ = (- - ++):
[(Sg. = 0)] => 8, = 0, / = 1,2 : обе пары ГД находятся во внешнем различно направленном сингулярном состоянии, при этом конец вектора h принадлежит трехмерной внутренней сингулярной поверхности
SE = {h(x, у, z): х2 -1- у2 + z2 + 2 ^у ^z - 8 = 0}, см. рис. За и рис. 36, где представлено сечение этой поверхности плоскостью z = 0 ■
£ = (+-++):
l(Q = 0)&(Sa. = 0)На,=(М±л);
-
8, =±л/2, 7 = 1 :
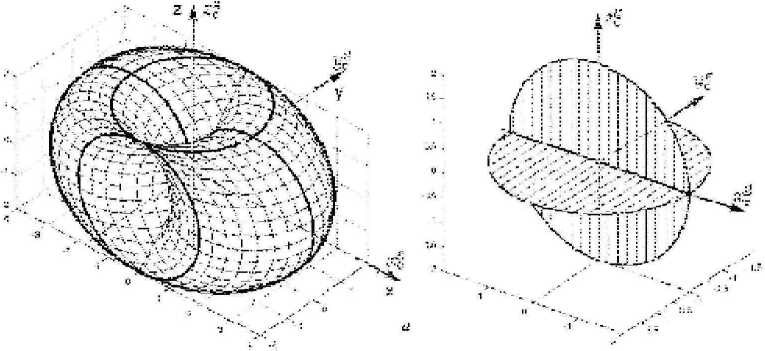
Рис. 3. Естественные сингулярные состояния схемы 2-SPE
-
4. (3, =Р2; (З3 =(34+п; (4)
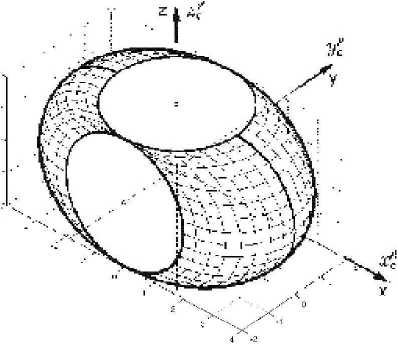
Рис. 4. Оболочка области вариации КМ схемы 2-SPE первая пара ГД находится во внутреннем сингулярном состоянии и одновременно векторы КМ ее гиродинов направлены перпендикулярно оси х КГБ, вторая пара находится во внешнем сингулярном состоянии, при этом вектор КМ h принадлежит окружности радиуса 2, ортогональной орту д, и с центром в начале координат, см. рис. 3 я;
£ = (+ + +-):
[(C5j =0)&(^ =0)]^a;=0v(±n);
-
8, =±л/2, / = 2 :
-
5. (31 = р2+д;|33=р4 + л; (5)
вторая пара ГД находится во внутреннем сингулярном состоянии и одновременно векторы КМ ее гиродинов направлены перпендикулярно оси х КГБ, первая пара находится во внешнем син-хулярном состоянии, при этом вектор КМ h принадлежит окружности радиуса 2, ортогональной орту g 2 и с центром в начале координат, см. рис. 3 а;
е = (+ - +-):
[Ц_ = 0] => 8, = ±л/2, z = 1,2: обе пары ГД находятся во внутреннем сингулярном состоянии, при этом вектор нормированного КМ СГК h = 0, см. рис. 3 а;
-
В. u = g1
-
6. Р3=Р4:(6)
-
7. Рз=Р4+л:(7)
Круговые плоскости границы области вариации КМ, ортогональные орту д,, см. рис. 4.
Внутренность круга, ограниченного окружностью (3), см. рис. 3 а.
-
С. и = д2
-
8- З^Зз:(8)
-
9. Рз^+л: (9)
Круговые плоскости границы области вариации КМ, ортогональные орту д2, см. рис. 4.
Внутренность круга, ограниченного окружностью (4), см. рис. 3 а.
Проекции всех 25 поверхностей возможных сингулярных состояний и оболочка области вариации КМ СГК кратной схемы 3-SPE представлены на рис. 5, пространственные изображения этих поверхностей приведены на рис. 5 в работе [6].
АНАЛИЗ ПРОХОДИМОСТИ
Представим квадратичную форму \h„ в векторно-матричном виде
Ah^-isxi/^xspa^-is^p-’sp, где диагональная матрица P = diag {/>,}. При анализе проходимости сингулярных состояний СГК кратных схем, в частности всех аналитически описанных выше сингулярных состояний СГК схемы 2-SPE, применяется новый подход, основанный на формировании вектора-столбца вариации углов ГД 8(3 из условия представления только нуль-движе-ния ГД в окрестности его известного особого состояния h = h* с учетом конкретного набора знаков е = (е,.), е, = sign(u • h,). С этой целью принимается 8(3 = 8(3„ = ^е” +... + <т„,_2е” _2, где скалярные величины а^ i = \^(jn-T) представляют малые углы произвольного знака, а векторы-столбцы e-eR™ (размерности /и) выбираются специальным образом для обеспечения только нуль-движения ГД. Для удобства будем считать, что для любых ГД каждой 5-ой группы (# = 1+>) всегда параметр Р, = l/(h; и) > 0 и введем параметр р, = e,t?z, который используется далее вместо параметра р, . Нетрудно убедиться, что при таком выборе вектора-столбца вариации углов ГД 8(3 квадратичная форму Ди порядка т превращается в квадратичную форму (т -2) -го порядка относительно компонентов вектора-столбца а (и,,, ае R”'-2: ah„ = q„ = ЦЗ^Р"^,, = -<а Q„a . Здесь симметричная марица Qn ^Е^/р-'Е^где диагональная матрица P=diag{^J и прямоугольная матрица Е„ = [е”,/ = 1 = (/и - 2)].
Далее считаются известными классические понятия теории квадратичных форм, см. например [7], а именно понятия их ранга, определенности, неопределенности, полуопределенности и вырожденности.
Очевидно, что для анализа проходимости особых состояний схемы 2-SPE, где число гиродинов /и = 4, на всех внутренних сингулярных поверхностях необходимо выполнить исследование проходимости лишь внутренних сингулярных поверхностей (2), (3), (5) и (7). Это следует из того, что такие пары поверхностей как (3) и (4), (7) и (9) отличаются лишь номером группы ГД.
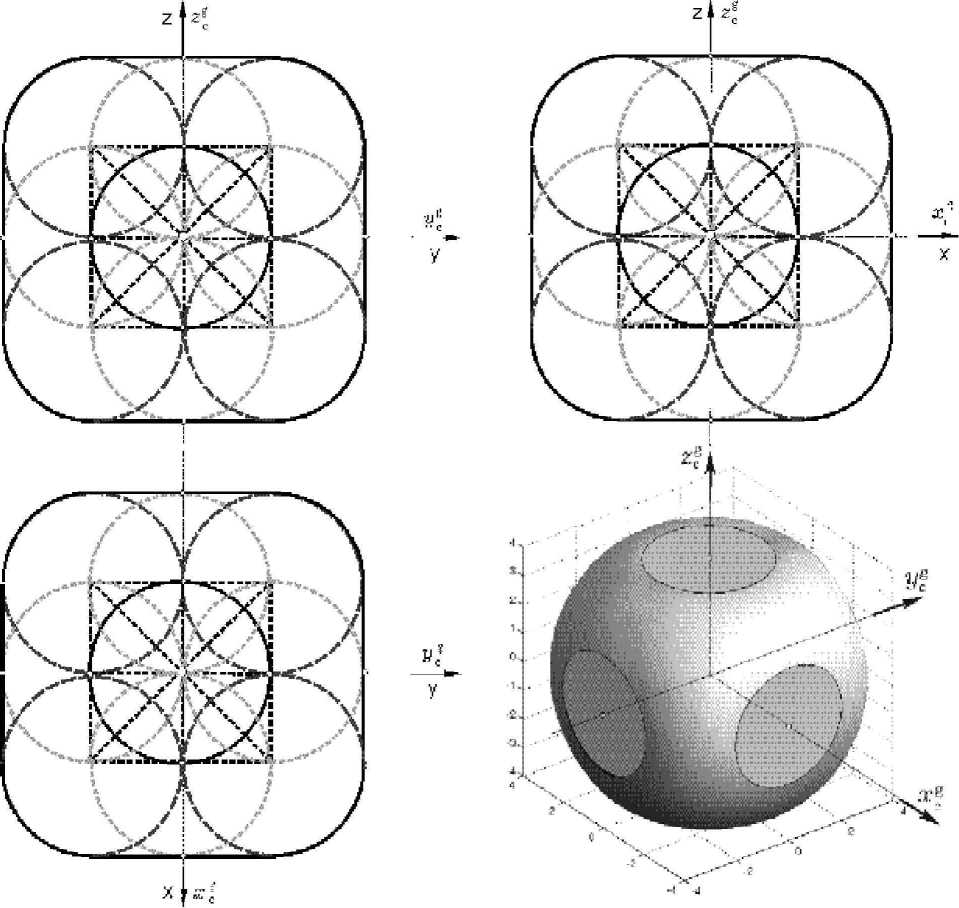
Рис. 5. Сингулярные состояния и оболочка области вариации КМ схемы 3-SPE
Внутренняя пространственная сингулярная поверхность SE (2), в = (+ + —).
Независимые нуль-движения ГД при h е SE реализуются при векторах-столбцах е” ={1,-1,0,0}; е2 = {0,0,1,-1}, потому марица
Q„ = (ЕЯУРЧЕ„ =
2/д 0
. 0 -МР1
и квадратичная форма
^, =~у(2А ZA -МЛР1)
= -^ / р} + al/р2
явлется неопределенной. Следовательно, проходима любая особая точка внутренней сингулярной поверхности SE (2).
Окружность (3), ортогональная орту д,, с центром в начале координат, е = (+ - ++).
Независимые нуль-движения ГД реализуют ся при векторах-столбцах е” = {1,1,0,0}; е” = {0,0,1,-!}, потому квадратичная форма
Ч„ = ~^^ 7 А "A ZA + 2А Ip?)
= -al/p2<0
является полуопреДеленной (частично вырожденной), ее ранг равен 1. Следовательно, любая особая точка внутренней сингулярной поверхности (3), фактически плоской замкнутой кривой, проходима. Если орт и лежит в плоскости, которой принадлежат орты g и д2 осей подвеса соответствущей пары ГД, то ранг матрицы Ah становится равным 1. В этом случае для анализа проходимости внутренней сингулярной окружности (3) используется третий “нуль-вектор” е” ={1,0,-1,0}, линейно-зависимый от векторов е” и е” ■ Здесь принимается 8(3,, а а^ + «2е2 + а^ , квадратичная форма
4»=-^Ж + <^з)2 /Ж - ср /Р\ + (а2-а3)2 /р2 + а}1 р^ является неопределенной, поэтому любая особая точка внутренней сингулярной плоской кривой (3), проходима и в этом случае.
Начало координат (5), £ = (+ - +-).
Независимые нуль-движения ГД реализуются при векторах-столбцах е” = {1,1,0,0}; с} = {0,0,1,!}, квадратичная форма
Ч„ ="у<А2 !Р\ "^ /А
+ A/p2-A/p2) = 0
является полностью вырожденной. Формально согласно указанному выше определению точка h = 0 проходима, но требует пристального внимания при синтезе законов настройки в силу ограниченности скоростей прецессии ГД. Если орт и лежит в плоскости, которая содержит орты д, и д2 осей подвеса ГД, то для анализа проходимости начала координат (5) используется третий “нуль-вектор” е” = {1,0,-1,0}, линейно-зависимый от векторов е” и е”. При §Р„ = од" + од? + а3е3 квадратичная форма
Чп = од((А + А)21А - A ZA P^-Psf fp^Pc^l р^)
является неопределенной, поэтому начало координат (2) и в этом случае проходимо.
Внутренность круга (7), ограниченного окружностью (3).
Независимые нуль-движения ГД реализуются при векторах-столбцах е} = {0,0,1,!}; е” = {<7,6,1,-1} с произволными параметрами а и ъ ■ Здесь квадратичная форма
А = "у«А + A)2 zА "(А " А)2 / А) является неопределенной. Следовательно, любая особая точка внутри круга (7), ограниченного окружностью (3), проходима.
Важную дополнительную информацию о проходимости внутренних особых точек дает знак гауссовой кривизны, вычисленный в этой точке. При обозначениях сЗ = (а, • (а, хи))" > 0 и р, = гipi с д > о гауссова кривизна к сингулярной поверхности в малой окрестности особой точки h* гиродинной системы кратной схемы определяется соотношением 1 / к = 4 S, Z; Су Piр^ , правая часть которого с учетом cv = 0 и Су = ст представляет собой симметричную квадратичную форму относительно параметров р. . При наличии только одного отрицательного знака е, в наборе £ = (е, ), например соответствующего второму ГД в первой паре, получается
1/к = 1((а -рг^рД
+ ^j*; "^k*! PjPkC~jk) > 0.
Если же в наборе. £ = (е, ) имеется два отрицательных знака, то возможны два варианта: отрицательные знаки е, соответствуют ГД в разных парах и оба отрицательных знака е, соответствуют гиродинам в одной паре. В первом варианте сингулярное состояние СГК проявляется только в начале координат (5) КГБ, где вектор нормированного суммарного кинетического момента СГК h = 0. Во втором варианте сингулярное состояние СГК происходит на внутренней пространственной сингулярной поверхности SE (2), которая содержит то же самое начало координат h = 0. В обоих этих вариантах знак гауссовой кривизны к может не быть положительным, что отражается в вырожденности либо в неопределенности соответствующих квадратичных форм qn.
Таким образом, все внутренние сингулярные поверхности схемы 2-SPE теоретически, без учета ограничений на скорости прецессии ГД, являются проходимыми, но характер такой проходимости существенно зависит от типа сингулярной поверхности. Наибольшего внимания при синтезе законов настройки СГК требуют сингулярные поверхности, в точках которых происходит вырождение соответствующих квадратичных форм qn , либо имеются два отрицательных знака в наборе £ = (е, ), а именно внутренняя пространственная сингулярная поверхность SE (2), где £ = (+ + —) или £ = (- - ++), и особенно начало координат (5), где h = 0 и £ = (+ - +-).
Детальный топологический анализ сингулярных состояний схемы 3-SPE и проходимости внутренних сингулярных поверхностей данной схемы показывает, что все эти поверхности проходимы. При этом наибольшую сложность в исследовании доставляет именно начало КГБ -центра сгустка сингулярных поверхностей, см. рис. 5, где h = 0 и набор знаков £ = (+ - + - +-).
СИНТЕЗ ЯВНЫХ ЗАКОНОВ
НАСТРОЙКИ СГК
Вводятся обозначения сразу для обеих рассматриваемых кратных схем:
а2=а+а; а4=а+а; у^^а+а;
Уж = А АУД z34=z3 + z4; z56=z5+z6;


Очевидно, что | ху |< 1 и | х34 |< 1, а в трехмерном пространстве КГБ множества х1? = <7 и х34 = а , где параметр а удовлетворяет условию | а |< 1, представляют собой части двух плоскостей, которые пересекаются по оси Ох® КГБ. При значении а = 0 условия х12 = 0 и х34 = О приводят к двум множествам Q^{x = 0;y = 0;|z|<2} и Qf ^{x = 0;|y|<2;z = 0} соответственно. Эти множества располагаются в центральной части области 8 и образуют “крест” с центром именно в начале КГБ, т.е. в наиболее критической точке внутреннего сингулярного состояния данной кратной схемы.
Введем функцию g(ix) = (ах)2 / 2, где разность дх нормированных проекций вектора КМ схемы 2-SPE на ось Ох® КГБ представляется в виде дх = х12 - х34 . Очевидно, что в начале КГБ, где х12=х34 = 0, выполняется условии 5(дх) = 0.
Функция распределения КМ между парами ГД определяется из условий положительности функции g(xx) и ее rpaflneHTagradg(AX) = Ax для всех точек внутри области S с одновременным достижением значений g(Ax) = 0 и grad g(Ax) = 0 только на границе 8* области S , когда произведение х12 х34 = 1, т.е. когда х12 и х34 одновременно равны i либо -1 и обе пары ГД находятся в состоянии одностороннего насыщения. Отсюда следует требование grad g(Ax) = i|/(x12,x34) > 0 при выборе функции i|/(x12,x34) с симметричным вхождением аргументов, которая должна обращаться в нуль только при условии х12 х34 = 1 Простейший выбор i|/(x12 ,х34) = 1 - х12 х34 проводит к нормированной функции распределения КМ СГК между парами ГД с фиксированным параметром р
/р1(Р) = Хп — ^34 + Р(Х12Х34— У = ^ , (16) где 0 < р < 1. При условии /р1 (Р) = 0 внутри области § остаются сингулярными (но проходимыми) только два одномерных множества
Sy = {(х/(2р))2 + (z/2)2 = 1, х < 0; у = О, |У11=1г21=1};
Sz = {(х /(2р))2 + (у / 2)2 = 1, X > 0; Z = 0, (11) |73| = |z4| = 1}, в которые трансформируются множества Qf и Qf , см. рис. 6 с двумя точками А (0,-р) и В (р,0) в плоскости переменных {х12,х34}. В соотношениях (11) учтены направления запрещенного внезапного перераспределения КМ СГК между парами ГД в произвольный момент времени t, когда h(p(/))e Syz в$у М Sz,. Закон настройки СГК по схеме 2-SPE принимается в виде
7)%(Р) = Фр(/р1(РХЬ(Р))
-8а1(фр,цр/р1(Р)) h(P)eS\Qyz (12) фр Relh(<7s,/p,rs) h(P)e Qs, s = y,z
Здесь £>+ - символ правой производной по времени, фр,Цр и /р - положительные параметры, при стандартной функции насыщения Sat(<7,x) используются нелинейные функции
Relh(rz./ х) = <
1 * > "ф -1 х< / ’
Ке1Ь(г/8Др^ДРО^ зависимости гу ^Л/ДР]-Р2 - л) и ^ : A/др. - р4 л),где а |а|<л;
а-2л Sign(a) |а|> л.
ММ =
При законе настройки (12) обеспечивается принадлежность конца нормированного вектора h(P) КМ СГК множеству Qyz(P) внутренних сингулярных состояний только в отдельные моменты времени (меры нуль по Лебегу) и биективная связь вектора тДР) с векторами-столбцами р и u8 = Р Анализ (И) приводит к такому результату: в КГБ для любых значений нормированного вектора КМ СГК h = {x,y.z}, принадлежащего сфере S® в ;х + у2 + z2< г2} радиуса rg < 2р, отсутствуют сингулярные состояния СГК.
Для схемы 2-SPE глобальный максимум определителя матрицы Грамма G = 64 / 27 достигается в трех точках (х = {0,±4-V2/3; у = 0; z = 0). При выборе значения р = 2-Уб/5 глобальный максимум G достигается в начале КГБ. Такой выбор значения р оптимизирует радиус сферы S®, рекомендуется назначать рабочую область Sg = 8® в виде сферы радиусом rg = 1.5.
Для схемы 3-SPE компоненты векторной функции С (Р) = {/р1, /р2, /р3} = 0 распределения КМ СГК между гиродинами принимаются в виде
./pl (Р) = Х13 ~ ^34 + р(-®13^34 — У = *;
/р2(Р) = У 56 — Г12 + Р(Т5бТ12 — 1) = 6 ; (13)
/рЗ (Р) = ’34 — %f + Р(%Д# - П = 0 , где постоянный параметр р также удовлетворяет условию 0 < р < 1, а векторный закон настройки СГК - ввиде fp (Р) = -8а1(фр,цДр (Р)) .Данный явный закон настройки с компоненты векторной функции fp (Р) распределения КМ (13) обеспечивает отсутствие сингулярных состояний СГК для всех внутренних точек области S вариации вектора его суммарного кинетического момента. Здесь рациональным является выбор параметра р = 0.65 , рекомендуется назначать рабочую область S8 = 8® в виде сферы радиусом rg =3 .
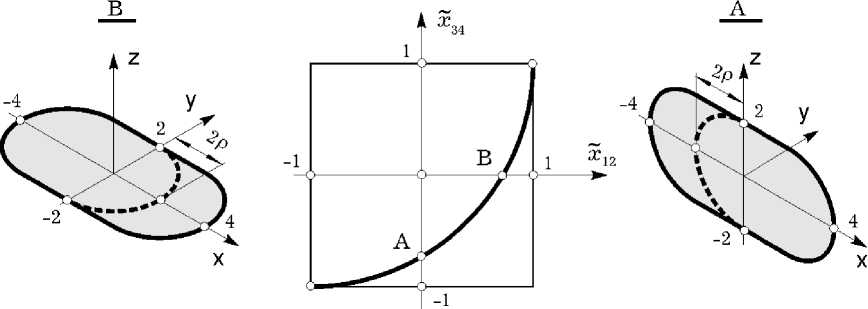
Рис. 6. Сингулярные множества СГК (11) при законе настройки (12) – половины эллипсов
ЗАКЛЮЧЕНИЕ
На основе оригинальной методики выполнен топологический анализ поверхностех сингулярных состояний СГК кратных схем на основе четырех и 2
шести гиродинов, а также анализ их проходимости. .
Предложены явные законы настройки таких СГК, которые основаны на аналитических соот- 3 . ношениях и позволяют эффективно прогнозировать реализуемость планируемого углового движения КА и обеспечивать равномерную высокую 4 точность гиросиловой стабилизации КА в разнообразных режимах, включая весьма напряженные режимы коррекции орбиты КА и разгрузки СГК.
Работа поддержана РФФИ (грант 08-0800512) и Отделением энергетики, механики, машиностроения и процессов управления РАН 6 . (программа 5).
Список литературы Топологический анализ сингулярных состояний и синтез явных законов настройки силовых гирокомплексов кратных схем
- Сомов Е.И., Бутырин С.А., Сорокин А.В., Платонов В.Н. Управление силовыми гирокомплексами космических аппаратов//Труды X Санкт-Петербургской Международной конференции по интегрированным навигационным системам. С.-Петербург: ЦНИИ "Электроприбор". 2003. C. 278-294.
- Токарь Е.Н. Проблемы управления гиросиловыми стабилизаторами//Космические исследования. 1978. Том 16. № 2. C. 179-187.
- Токарь Е.Н., Платонов В.Н. Исследование особых поверхностей систем безупорных гиродинов//Космические исследования. 1978. Том 16. № 5. С. 675-685.
- Кульба В.В., Микрин Е.А., Павлов Б.В., Платонов В.Н. Теоретические основы проектирования информационно-управляющих систем космических аппаратов. М.: Наука. 2006. 579 с.
- Токарь Е.Н., Легостаев В.П, Платонов В.Н., Седых Д.А. Кратные гиросиловые системы//Космические исследования. 1981. Том 19. № 6. С. 813-822.
- Сомов Е.И., Мещеряков С.С. Оценка реализуемости поворотного маневра космического аппарата при неопределенности накопленного кинетического момента силового гирокомплекса//Известия Самар. науч. центра РАН. 2008. Том 9. № 3. С. 799-807.
- Ефимов Н.В., Розендорн Э.Р. Линейная алгебра и многомерная геометрия. М.: Наука. 1970. 528 с.
